 ISSN
ISSN 


 下载:
下载:
-
精确制导武器远程化的发展对导航提出了更高要求。GPS与INS的组合技术,充分利用了GPS与INS各自的优点,当GPS遭受信号干扰时,系统可通过INS来自主维持导航精度;当GPS恢复可用,系统则将GPS/INS的输出通过卡尔曼滤波得出最优误差估计,反馈回INS进行累积误差校正,从而在达到抗干扰目的的同时,获得更好的导航性能,因此,被精确制导武器广泛采用[1]。GPS/INS的组合导航方式主要有松耦合、紧耦合和超紧耦合3种,在超紧耦合方式中,GPS与INS的组合发生在GPS的跟踪环部分,相对于松耦合和紧耦合方式而言,它彻底改变了传统GPS跟踪环的设计结构[2],大大提升了GPS接收机的抗干扰性能。
当前,针对GPS的导航对抗已成为现代战争中夺取制信息权的关键。对采用GPS/INS超紧耦合的精确制导武器实施导航对抗,要通过干扰源的合理设置和高效配置来确保对目标GPS接收机在运行轨迹上的连续压制,造成INS因长时未获得GPS修正而产生足够大的累积误差,从而满足对己方重点区域或重要设施的防护需求。
对GPS/INS超紧耦合下干扰源威力区的精确解算是干扰源合理设置和高效配置的关键。文献[3-6]简单以扩频增益作为GPS接收机的抗干扰容限,未考虑接收机抗干扰措施对接收信号处理的影响,因此所得结论不具有借鉴性。文献[7-9]对GPS/INS超紧耦合下的GPS接收机跟踪环路抗干扰性能进行了分析,但将干扰对载波环和码环的影响等同处理,而实际上干扰对两个环路的影响机理是有区别的。文献[10-13]以码跟踪误差或干扰等效载噪比为依据,分析了干扰源空间位置对干扰功率与干扰距离关系的影响,但单纯以码跟踪误差或干扰等效载噪比来度量干扰效果过于片面,对干扰战术运用的指导意义有限。
本文在考虑精确制导武器采用GPS/INS超紧耦合的情况下,以对GPS接收机造成的不同干扰效果来划分干扰威力区,解算得到不同威力区所对应的干扰距离与干扰功率的关系;结合对所干扰目标连续压制作用距离的分析及所需干扰源数量和部署位置进行建模计算,确保了干扰源的合理设置和高效配置。
-
根据对压制干扰下GPS接收机不同干扰效果评估指标的分析,采用跟踪环失锁、定位误差增大和平均捕获时间延长来对干扰威力区进行划分,具体如图1所示。

图 1 对GPS接收机干扰威力区划分示意图
当前,军码直捕技术在实际应用中还受到诸如速度、效率等因素的制约,因此,一些GPS军用接收机在失锁重捕阶段仍需C/A码的辅助[14]。本文在文献[15]的基础上,对图1中各干扰威力区对应的干扰效果进行量化:将受扰区界定为造成对C/A码的平均捕获时间超过正常情况下的10倍;半失效区界定为存在带有误差的伪距量测输出且干扰造成的星历解调误比特率大于0.01;失效区界定为干扰造成接收机跟踪环失锁。以C/A码辅助下的P(Y)码和M码接收机为干扰对象,选择兼顾抗时频域滤波和干扰效能的匹配谱作为干扰信号样式。由于来袭目标的GPS接收机都是处于对卫星导航信号的跟踪锁定状态,因此,干扰对接收机的作用顺序为:半失效、失效、受扰。
码跟踪误差是主要的测距误差源,GPS接收机码跟踪环(delay-locked loop, DLL)的经验跟踪门限为[15]:
$$3{\sigma _{{\rm{DLL}}}} = 3{\sigma _{{\rm{JDLL}}}} + {R_{\rm{e}}} \leqslant d/2$$ (1) 式中,
${\sigma _{{\rm{JDLL}}}}$ 为干扰造成的码跟踪颤动(忽略接收机热噪声的影响);${R_{\rm{e}}}$ 为DLL的动态应力误差;$d$ 为早迟码间距。匹配谱干扰下的非相干超前减滞后功率(noncoherent early-late processing, NELP)处理码跟踪环路产生的码跟踪误差为:$$\begin{split} &{\sigma _{{\rm{JDLL}}(}}_{{\rm{NELP)}}} \!=\!\! \frac{{\sqrt {{B_{\rm{D}}}\dfrac{{{P_{\rm{J}}}}}{{{P_{\rm{s}}}}}\!\displaystyle\int_{ - {{{\beta _{\rm{r}}}} / 2}}^{{{{\beta _{\rm{r}}}} / 2}} {{G_{\rm{s}}}^2(f){{\sin }^2}({{\text π}}fdT_{\rm{c}}){\rm{d}}f} } }}{{2{\text π}\displaystyle\int_{ - {{{\beta _{\rm{r}}}} / 2}}^{{{{\beta _{\rm{r}}}} / 2}} {f{G_{\rm{s}}}(f)\sin ({{\text π}}fd{T_{\rm{c}}}){\rm{d}}f} }}{\rm{ \times }}\!\!\!\! \\ &\qquad\;\; \sqrt {1 + \frac{{\dfrac{{{P_{\rm{J}}}}}{{{P_{\rm{s}}}}}\displaystyle\int_{ - {{{\beta _{\rm{r}}}} / 2}}^{{{{\beta _{\rm{r}}}} / 2}} {{G_{\rm{s}}}^2(f){{\cos }^2}({{\text π}}fd{T_{\rm{c}}}){\rm{d}}f} }}{{{T_{\rm{d}}}{{\left( {\displaystyle\int_{ - {{{\beta _{\rm{r}}}} / 2}}^{{{{\beta _{\rm{r}}}} / 2}} {{G_{\rm{s}}}(f)\cos ({{\text π}}fd{T_{\rm{c}}}){\rm{d}}f} } \right)}^2}}}} \end{split}$$ (2) 式中,
${B_{\rm{D}}}$ 为码环噪声带宽;${P_{\rm{J}}}$ 为干扰信号功率;${P_{\rm{s}}}$ 为卫星接收信号功率;${\beta _{\rm{r}}}$ 为接收机前端等效预相关带宽;${G_{\rm{s}}}(f)$ 为卫星接收信号的归一化功率谱密度;${T_{\rm{c}}}$ 为伪码码元宽度;${T_{\rm{d}}}$ 为相关积分时间。接收机通常利用载波环对码环进行辅助,这样可以基本去掉码环中的所有动态,有利于码环在更窄的${B_{\rm{D}}}$ 下工作。设${B_{\rm{D}}} = 1\;{\rm{Hz}}$ ,P(Y)码接收机参数设置为:$\,{\beta _{\rm{r}}} = 20.46\;{\rm{MHz}}$ ,${T_{\rm{d}}} = 20\;{\rm{ms}}$ ,$d = 1$ ;M码接收机参数设置为:${\beta _{\rm{r}}} = 30.69\;{\rm{MHz}}$ ,${T_{\rm{d}}} = 100\;{\rm{ms}}$ ,$d = {1 / 8}$ ,联合式(1)和式(2)可计算得到P(Y)码和M码接收机码环经验跟踪门限对应的干信比分别为56.5 dB和58 dB。码环所经受的动态应力可忽略不计的基础是载波环保持稳定,采用二象限反正切鉴别器的载波锁相环(phase-locked loop, PLL)经验跟踪门限为[15]:
$$3{\sigma _{{\rm{PLL}}}} = 3{\sigma _{{\rm{JPLL}}}} + {\theta _{\rm{e}}} \leqslant 45^\circ $$ (3) 式中,
${\sigma _{{\rm{JPLL}}}}$ 为干扰造成的振荡器颤动(忽略接收机热噪声的影响);${\theta _{\rm{e}}}$ 为PLL的动态应力误差,不考虑由振动和阿仑偏差引起的振荡器颤动。压制干扰下${\sigma _{{\rm{JPLL}}}}$ 的计算公式为:$${\sigma _{{\rm{JPLL}}}} = \frac{{360}}{{2{{\text π}}}}\sqrt {\frac{{{B_{\rm{P}}}}}{{{C / {{N_{\rm{J}}}}}}}\left( {1 + \frac{1}{{2{T_{\rm{d}}}{C / {{N_{\rm{J}}}}}}}} \right)} $$ (4) 式中,
${B_{\rm{P}}}$ 为载波环噪声带宽;${C / {{N_{\rm{J}}}}}$ 为干扰等效载噪比;${T_{\rm{d}}}$ 为相关积分时间。在GPS/INS超紧耦合下,载体的动态性能可由惯性测量单元(inertial measurement unit, IMU)补偿,PLL环路滤波器不需要考虑载体高动态时所需的大带宽,${B_{\rm{P}}}$ 可减至典型值2 Hz[2]。这时的${\theta _{\rm{e}}}$ 仅包含由组合导航载体多普勒频率估计误差所引入的误差,可表示为[1]:$${\theta _{\rm{e}}} = \frac{{{\alpha ^n}{{\rm { {\text δ} f}}^{(n - 1)}}}}{{B_{\rm{P}}^n}} \times 360$$ (5) 式中,
$n$ 表示环路阶数;$\alpha = {{{B_{\rm{P}}}} / {{\omega _n}}}$ (${\omega _n}$ 为环路的自然角频率);$ {\text δ} {\rm f}$ 为载体多普勒估计误差。$n$ 和${B_{\rm{P}}}$ 决定了环路对信号的动态响应,提高$n$ 或增加${B_{\rm{P}}}$ 有助于改善环路的动态性能。在受INS辅助的PLL中,为了降低${B_{\rm{P}}}$ 的减小对高$n$ 下${\theta _{\rm{e}}}$ 的增加作用,可以适当降低$n$ 。当$n = 2$ 时,$\alpha = {{3\sqrt 2 } / 8}$ [1],$ {\text δ} {\rm f}$ 通常在1 Hz以内[1],这里$ {\text δ} {\rm f}$ 取0.5 Hz,则${\theta _{\rm{e}}} = 12.66^\circ $ ,${\sigma _{{\rm{JPLL}}}} \leqslant 10.78^\circ $ 。匹配谱干扰下的
${C / {{N_{\rm{J}}}}}$ 为:$${C / {{N_{\rm{J}}}}} = \frac{{{P_{\rm{s}}}{{[{R_0}(\tau )]}^2}}}{{{P_{\rm{J}}}\displaystyle\int_{{{ - {\beta _{\rm{r}}}} / 2}}^{{{{\beta _{\rm{r}}}} / 2}} {{G_{\rm{s}}}^2(f){\rm{d}}f} }}$$ (6) 式中,
${R_0}( \cdot )$ 为带限伪码自相关函数;$\tau $ 为码相位估计误差。联合式(4)和式(6)可计算得到P(Y)码和M码接收机(参数同前)载波环经验跟踪门限对应的干信比分别为52.5 dB和53 dB。由于载波环对码环的辅助,消除了码环承受的动态应力,使码环的抗干扰裕度优于载波环。实际中码环和载波环是配合工作的,因此,可将载波环的抗干扰性能作为接收机整个跟踪环路的抗干扰性能,即造成P(Y)码和M码接收机跟踪环失锁而失效所对应的最小干信比分别为52.5 dB和53 dB。
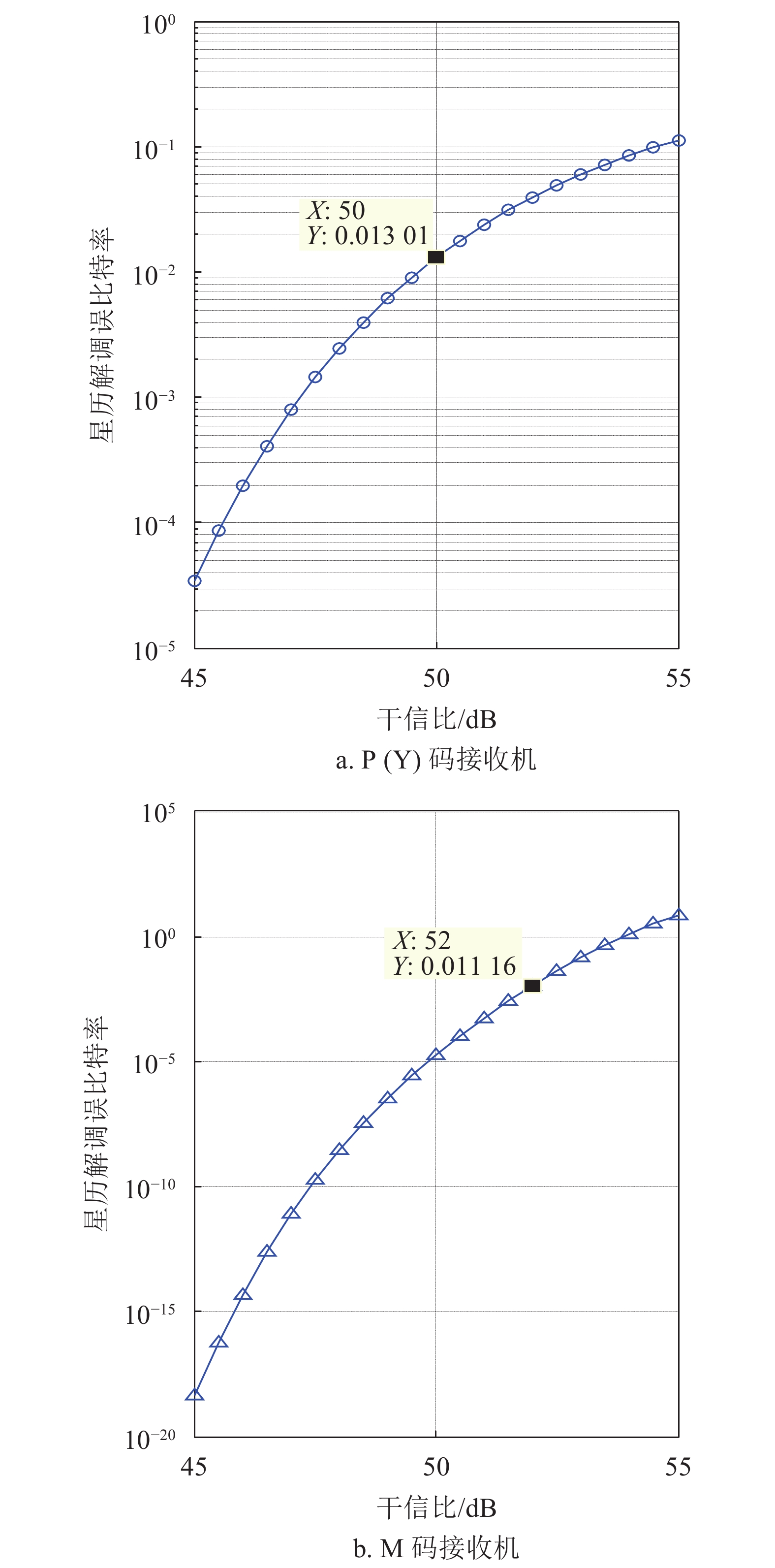
假定在干扰作用下PLL仍能跟踪载波相位而没有任何周跳,则P(Y)码和M码接收机星历解调误比特率分别为[15]:
$$ \left\{ \begin{aligned} & {P_{{\rm{P(Y}}{{\rm{)}}_{\rm{b}}}}} = {\rm{Q}}\left( {\sqrt {\frac{{2C}}{{{N_{\rm{J}}}{R_{\rm{b}}}}}} } \right) \\ & {P_{{{\rm{M_b}}}}} \leqslant 0.5(36{D^{10}} + 211{D^{12}} + 1\;404{D^{14}} + 11\;633{D^{16}}) \\ & D = \exp \left( { - \frac{C}{{2{R_{\rm{b}}}{N_{\rm{J}}}}}} \right) \end{aligned} \right. $$ (7) 式中,
${\rm{Q(}} \cdot {\rm{)}}$ 为高斯${\rm{Q}}$ 函数;${R_{\rm{b}}}$ 为数据速率。根据式(6)和式(7)可得P(Y)码和M码接收机(参数同前)星历解调误比特率随干信比的变化曲线如图2所示(对P(Y)码和M码信号${R_{\rm{b}}}$ 都取50 bps)。由图2可以看出,造成P(Y)码和M码接收机星历解调误比特率大于0.01的最小干信比分别为50 dB和52 dB,即造成P(Y)码和M码接收机定位误差增大而半失效所对应的最小干信比分别为50 dB和52 dB。
接收机在失锁后为了能尽快恢复工作,将首先对民码进行快速捕获,平均捕获时间
${T_{{\rm{avq}}}}$ 为总搜索单元数${N_{{\rm{search}}}}$ 与单个单元平均驻留时间${T_{{\rm{dwell}}}}$ 的乘积,其中[16]:$$\left\{ \begin{aligned} & {N_{{\rm{search}}}} = ({{2{f_{\max }}} / {\Delta f}})({L_{\rm{c}}}/\Delta L) \\ & {T_{{\rm{dwell}}}} = \frac{{(2 - {P_{\rm{d}}})(1 + {k_1}{P_{{\rm{fa}}}})T}}{{2{P_{\rm{d}}}}} \end{aligned} \right.$$ (8) 式中,
${f_{\max }}$ 为最大多普勒频移(与载体动态性能相关);$\Delta f$ 为多普勒频移搜索步长;${L_{\rm{c}}}$ 为伪码序列长度;$\Delta L$ 为码相位搜索步长;${P_{\rm{d}}}$ 为检测概率;${P_{{\rm{fa}}}}$ 为虚警概率;$T$ 为预检测积分时间;${k_1}$ 为错误判决代价因子。对于搜索/锁定策略的状态转移图为连续$n$ 次正确判决的系统,${k_1}$ 表达式为:$${k_1} = 1 + \frac{{1 + (1 - {P_{{\rm{fa}}}}) + {{(1 - {P_{{\rm{fa}}}})}^2} + \cdots + {{(1 - {P_{{\rm{fa}}}})}^{n - 1}}}}{{{{(1 - {P_{{\rm{fa}}}})}^n}}}$$ (9) 
图 2 星历解调误比特率随干信比变化曲线
在顺序搜索非相干积分下的
${P_{\rm{d}}}$ 和${P_{{\rm{fa}}}}$ 分别为:$$\left\{ \begin{aligned} & {P_{\rm{d}}} = {\rm{Q}}\left( {\frac{A}{{{\sigma _{\rm{n}}}}},\frac{{{T_{\rm{h}}}}}{{{\sigma _{\rm{n}}}}}} \right) \\ & {P_{{\rm{fa}}}} = \exp \left( { - \frac{{T_{\rm{h}}^{\rm{2}}}}{{2\sigma _{\rm{n}}^{\rm{2}}}}} \right) \end{aligned} \right.$$ (10) 式中,
${\rm{Q(}}a,b{\rm{)}}$ 为Marcum Q函数;$A$ 为卫星接收信号幅值;$\sigma _{\rm{n}}^2$ 为噪声功率;${T_{\rm{h}}}$ 为检测门限。在只考虑干扰影响下,${A / {{\sigma _{\rm{n}}}}} = \sqrt {{{2CT} / {{N_{\rm{J}}}}}} $ 。在GPS/INS超紧耦合多普勒频移先验信息近似已知的基础上,GPS接收机失锁重捕时的
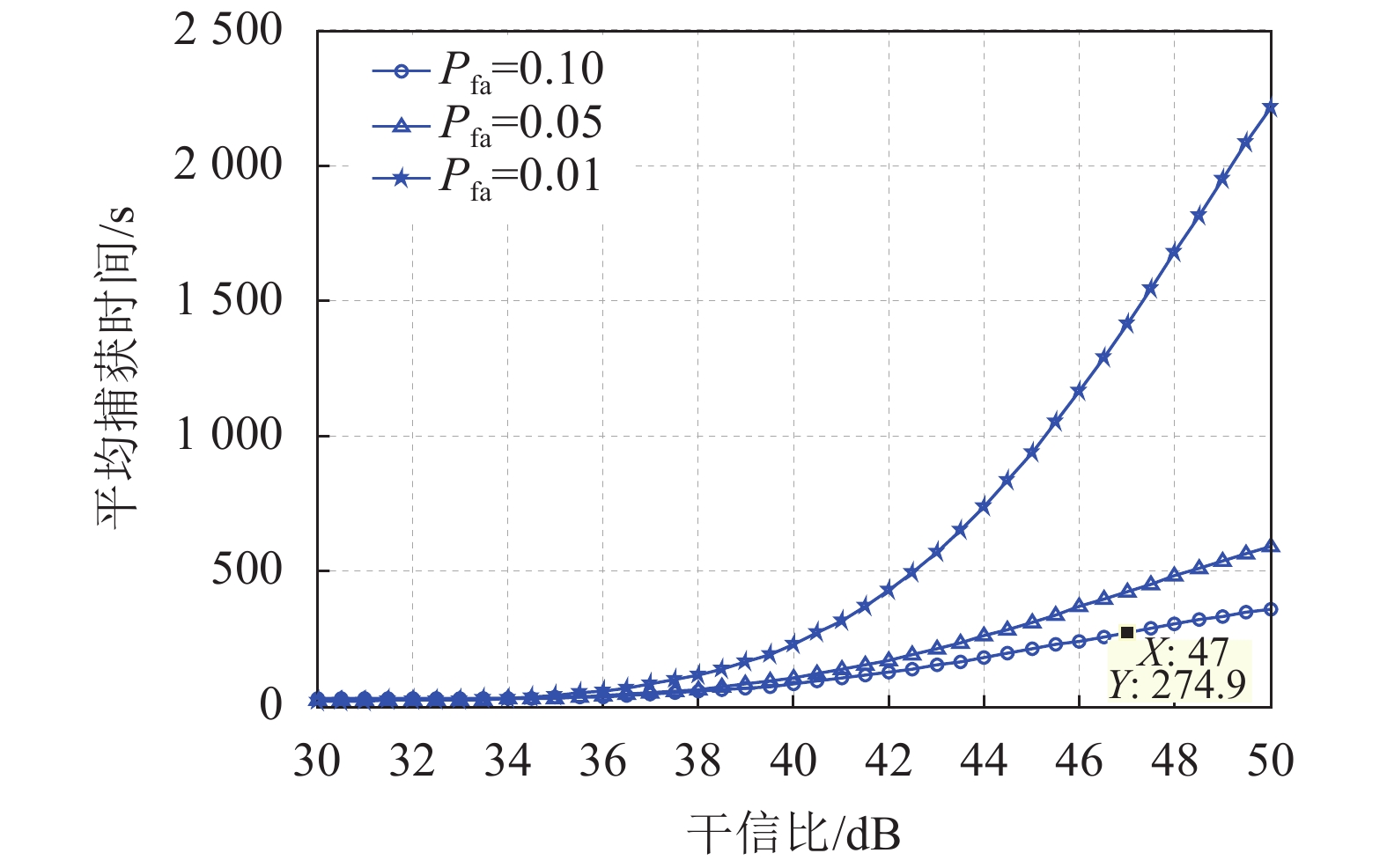
${N_{{\rm{search}}}}$ 可等价为${{{L_{\rm{c}}}} / {\Delta L}}$ 。设置${P_{{\rm{fa}}}}$ 分别为0.1、0.05和0.01,令${\sigma _{\rm{n}}} = 1$ (归一化),取$n = 2$ 、$T = 20\;{\rm{ms}}$ 、$\,{\beta _{\rm{r}}} = 30.69\;{\rm{MHz}}$ ,码相位捕获精度为0.25码片,根据式(6)、式(8)~式(10)可得C/A码(${L_{\rm{c}}} = 1\;023$ ,$\Delta L = 0.5$ )平均捕获时间随干信比的变化曲线如图3所示。
图 3 C/A码平均捕获时间随干信比变化曲线
在图3的同等参数条件下,无人为干扰的C/A码接收信号载噪比对应的平均捕获时间分别为27.31(
${P_{{\rm{fa}}}} = 0.1$ )、23.69(${P_{{\rm{fa}}}} = 0.05$ )和21.08(${P_{{\rm{fa}}}} = 0.01$ )。由图3可以看出,在干信比为47 dB时,能使${P_{{\rm{fa}}}} = 0.1$ 下的C/A码顺序搜索平均捕获时间超过无人为干扰时平均捕获时间的10倍,因此,可将受扰区对应的干信比设置为47 dB。C/A码、L1 P(Y)码和L1 M码接收信号最大功率分别为
$ - 153\;{\rm{dBW}}$ 、$ - 155\;{\rm{dBW}}$ 和$ - 150\;{\rm{dBW}}$ (不考虑点波束)[17],设接收机指向卫星的天线增益为1.5 dBic[15],则可得C/A码捕获受扰区、P(Y)码解调半失效区、M码解调半失效区、P(Y)码跟踪失效区和M码跟踪失效区对应在射频前端处所需的最小干扰功率${J_{{\rm{dB}}}}$ 分别为$ - 104.5$ 、$ - 103.5$ 、$ - 96.5$ 、$ - 101$ 和$ - 95.5\;{\rm{dB}}$ 。根据Friis传播公式,${J_{{\rm{dB}}}}$ 可表示为:$${J_{{\rm{dB}}}} = {({\rm{EIR}}{{\rm{P}}_{\rm{j}}})_{{\rm{dB}}}} + {G_{{\rm{rj}}}} + 20\lg \frac{\lambda }{{4{{\text π}}D}}$$ (11) 式中,
${\rm{EIR}}{{\rm{P}}_{\rm{j}}}$ 为干扰源的等效各向同性辐射功率;${G_{{\rm{rj}}}}$ 为接收机天线在干扰方向上的增益;$\lambda $ 为干扰信号波长;$D$ 为干扰源与接收机之间的距离。${G_{{\rm{rj}}}}$ 的大小与干扰信号入射角$\alpha $ (与垂直方向夹角)有关,$\alpha $ 可表示为:$$\alpha = \arccos [{{(H - h)} / D}]$$ (12) 式中,H为干扰源高度;
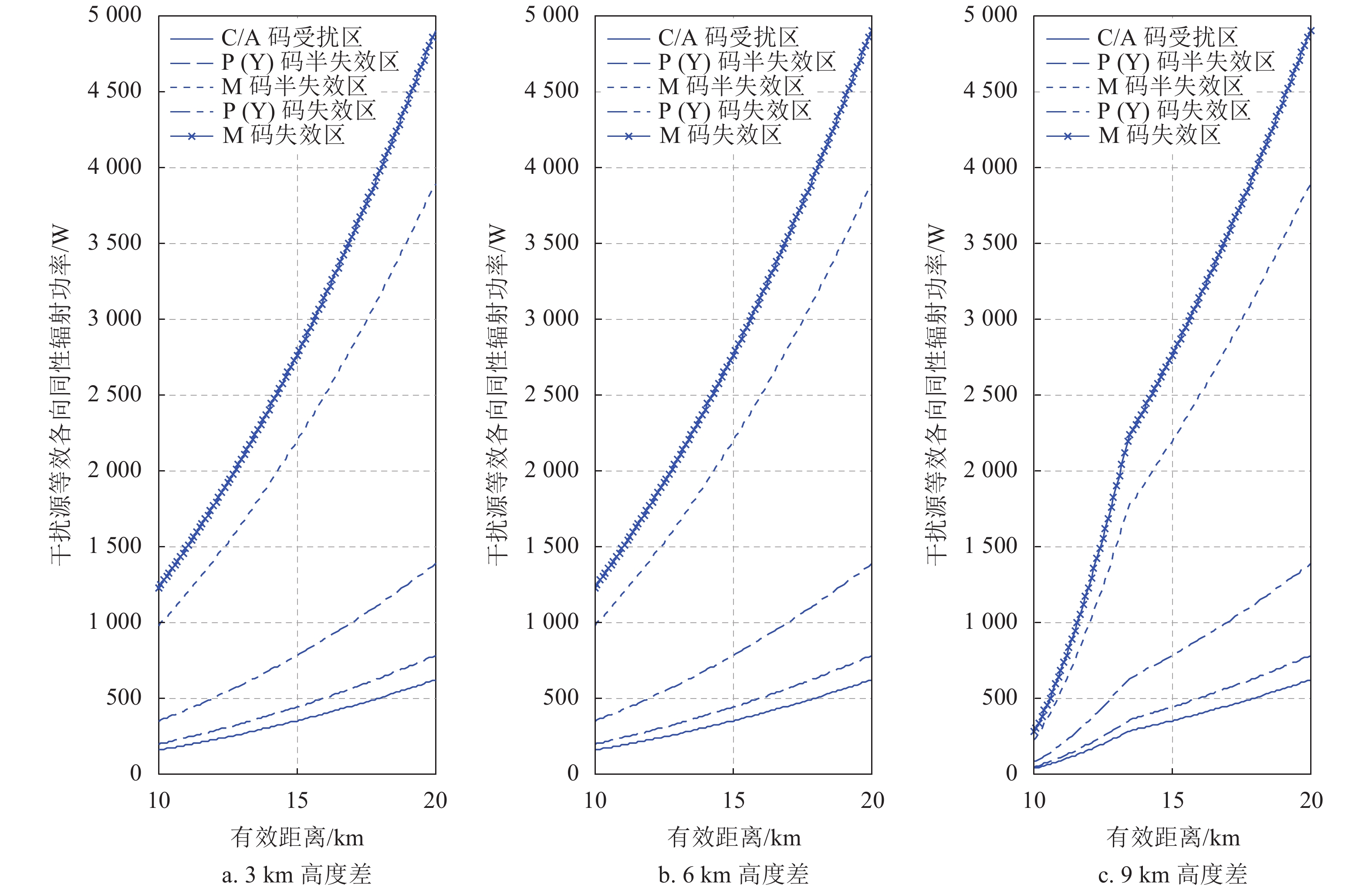
$h$ 为接收机高度。当干扰信号进入接收机天线的波瓣范围后(与地平线夹角大于等于5°),随着$\alpha $ 的变化,接收增益也随之改变,根据文献[18],可用以下分段函数来近似计算干扰信号的天线接收增益:$${G_{{\rm{rj}}}} = \left\{ \begin{aligned} & {29 - 25\lg \alpha }\quad {1^\circ \leqslant \alpha \leqslant 20^\circ } \\ & { - 3.5} \quad\qquad\;\;\;{20^\circ < \alpha \leqslant 26.3^\circ }\\ & {32 - 25\lg \alpha }\quad{26.3^\circ < \alpha \leqslant 48^\circ } \\ & { - 10}\qquad\qquad {48^\circ < \alpha \leqslant 85^\circ } \end{aligned} \right.$$ (13) 为避免载体遮挡,干扰源一般部署于GPS接收机上方,设干扰源与接收机之间的高度差分别为3、6、9 km,则不同干扰威力区对应的有效距离与干扰源等效各向同性辐射功率之间的关系如图4所示。
由图4可以看出,随着有效距离的增加,所需的干扰功率增大明显。提升干扰源高度,可在一定有效距离范围内减少所需的干扰功率,但随着有效距离的进一步增加,这种优势消失。由于升空干扰源的功率载荷和高度都受限,使单干扰源的有效干扰距离有限。因此,对于GPS/INS超紧耦合的精确制导武器,需要多个干扰源的相互衔接,以形成干扰无缝覆盖区。

图 4 不同干扰威力区有效距离与干扰源等效各向同性辐射功率关系曲线
-
在确定干扰源的威力区后,需进一步确定对干扰目标的连续压制范围。对于GPS/INS超紧耦合的精确制导武器,其对给定攻击目标的摧毁概率
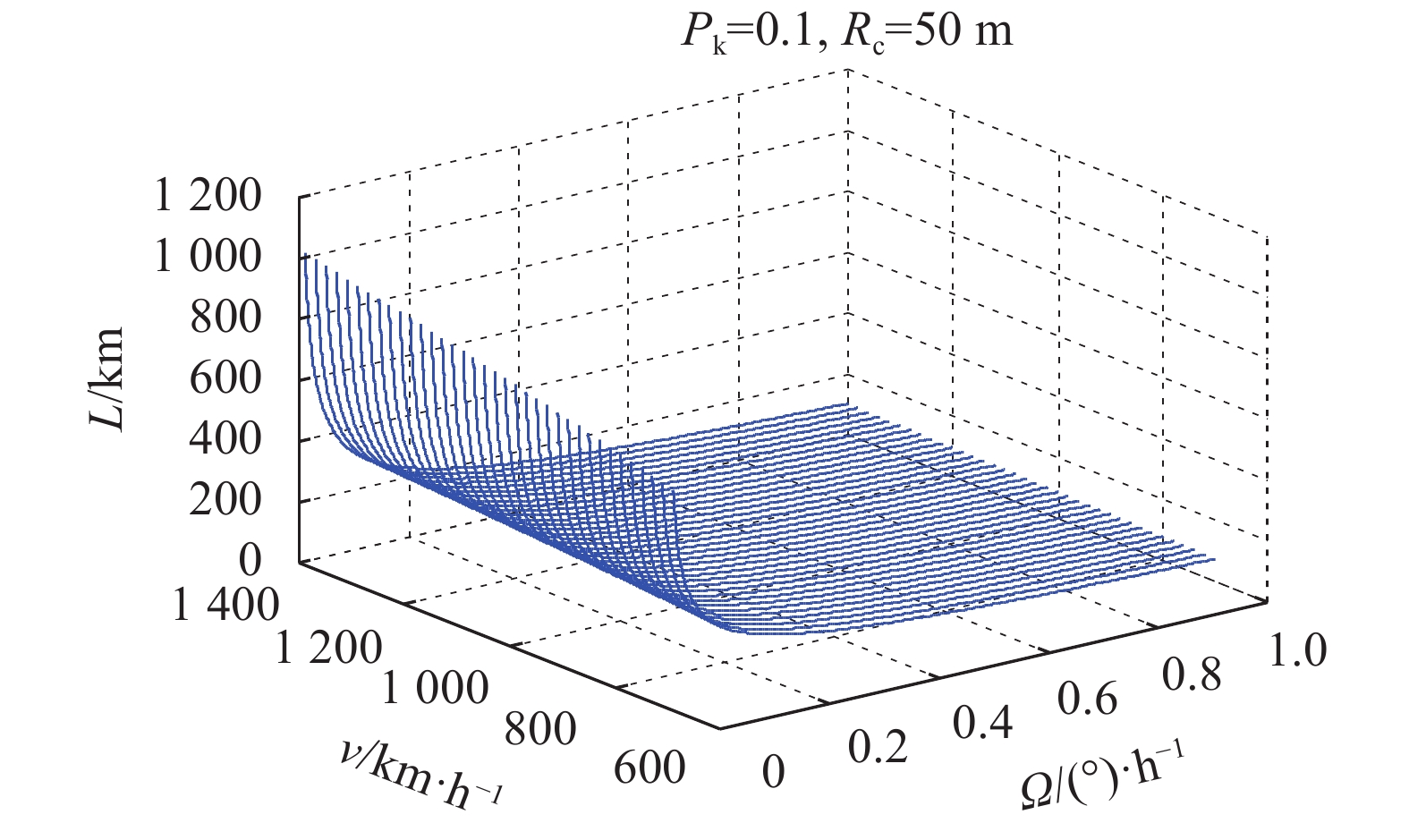
${P_{\rm{k}}}$ 可近似表示为[11]:$${P_{\rm{k}}} = 1 - {0.5^{{{\left( {\frac{{v{R_{\rm{c}}}}}{{\varOmega {L^2}}}} \right)}^2}}}$$ (14) 式中,
$v$ 为精确制导武器速度;$\varOmega $ 为INS的漂移率;${R_{\rm{c}}}$ 为对攻击目标的杀伤范围;$L$ 为连续压制作用距离。在给定${P_{\rm{k}}}$ 和${R_{\rm{c}}}$ 的情况下,可仿真得到$\varOmega $ 、$v$ 、$L$ 三者之间的关系如图5所示。由图5可以看出,
$\varOmega $ 越小,$v$ 越快,则所需的连续压制作用距离越长。因此,可由雷情系统来识别精确制导武器类型,进而在数据库中查找出与其匹配的$v$ 、$\varOmega $ 参数值,结合被防护目标对${P_{\rm{k}}}$ 和${R_{\rm{c}}}$ 的要求,估算出所需的连续压制作用距离。
图 5 不同参数制导武器所需的连续压制作用距离
-
将干扰源形成的威力区建模为一个空间上的球体,设
${L_i}$ 为一部干扰源的有效压制距离,$L$ 为所需的连续压制作用距离,则干扰源的数量$N$ 满足:$$\sum\limits_{i = 1}^N {{L_i}} \geqslant L$$ (15) 式(15)的约束条件如下:
1) 满足
$\arcsin [{{(H - h)} / D}] \geqslant 5^\circ $ 的可配置区角域条件;2)
$H - h \leqslant {D_{\max }}$ ,${D_{\max }}$ 为最大压制距离;3) 干扰源在水平方向上的配置间隔要小于等于两相邻干扰源有效压制距离和的一半;
4) 满足
$D \leqslant 4.124(\sqrt H + \sqrt h )$ 的可视要求(考虑大气折射情况),且$D \leqslant {D_{\max }}$ 。结合前面的分析,给出一个干扰源数量需求的计算实例。设GPS/INS超紧耦合的精确制导武器
$v = 670\;{\rm{km/h}}$ ,$\varOmega = 0.1\;^\circ /{\rm{h}}$ ,由图5可得此时需要连续压制的作用距离约为222 km。升空干扰源部署于制导武器航路正上方10 km(H=10.5 km,h=0.5 km)处的同一高度、发射功率为1 kW的匹配谱干扰信号。以C/A码辅助下的P(Y)码接收机为例,其受扰区与半失效区、受扰区与失效区在射频前端处所需的干扰功率分别相差1、3.5 dB,分别对应大约2.8、8.5 km的干扰距离差。不失一般性,可认为GPS接收机在失锁后对卫星信号的重捕时间至少为平均捕获时间的三分之一,则制导武器在信号重捕时间内向前大约运行了17 km,因此,可采用C/A码捕获受扰区射频前端处所需的最小干扰功率$ - 104.5\;{\rm{dB}}$ 来计算最大压制距离。根据式(11)可得30 dB的干扰功率在传输25.3 km后衰减为$ - 94.5\;{\rm{dB}}$ ,由式(12)可计算出此时的干扰入射角近似为67°,对应的天线接收增益为$ - 10\;{\rm{dB}}$ ,两者之和正好为C/A码捕获受扰区射频前端处所需的最小干扰功率,因此,以25.3 km作为最大压制距离${D_{\max }}$ ,可得干扰源的有效压制距离${L_i}$ 为46.4 km。根据几何知识,此时对于约束条件1)、2)、4)都是满足的,升空干扰源在水平方向上的配置间隔取最大值46.4 km,这时至少需要5个干扰源来形成无缝覆盖区。根据几何学的相关知识易知,将升空干扰源部署在干扰目标航路正上方,即让干扰目标沿着干扰威力区投影圆的直径飞行时,覆盖一定长度航路所需的干扰源数量最少,但这在实际实施中难度较大。更一般的考虑是将升空干扰源部署于干扰目标航路的两侧,其在干扰目标平面上的投影如图6所示。

图 6 沿航路两侧升空干扰源部署平面投影示意图
设干扰目标航路为直线(若航路为曲线,可以用多条折线来逼近),干扰源到航路的水平距离为d,干扰源威力区投影到干扰目标平面上的最大干扰半径为r。设置干扰源在干扰目标航路两侧对称分布,以保证干扰目标不会因为航路的偏离而飞出干扰威力区,将威力区宽度设为两个干扰源在Y轴方向的距离,此时,最靠近保护目标点的干扰源横坐标为:
$$|MN| = \sqrt {{r^2} - {{(2d)}^2}} $$ (6) 后一个干扰源相对前一个干扰源横坐标的固定增量
$\Delta x$ 为:$$\Delta x = 2d\tan \left( {{{{\text π}} \bigg/ 4} + {{\arccos \left( {\frac{{2d}}{r}} \right)} \bigg/ 2}} \right)$$ (17) 根据连续压制作用距离L可计算得到此时所需的最少干扰源数量k为(在满足约束条件情况下):
$$k = \left\lceil {{{(L - 2|MN| - \Delta x)} / {\Delta x}}} \right\rceil + 2$$ (18) 式中,
$\left\lceil \cdot \right\rceil $ 表示向上取整。若将最靠近保护目标点干扰源的坐标定为$(|MN|, - d)$ ,那么可依次推出第$k$ ($k \geqslant 1$ )个干扰源的位置坐标为:$$\left\{ \begin{aligned} & {x_k} = (k - 1)\Delta x + |MN| \\ & {y_k} = {( - 1)^k}d \\ \end{aligned} \right.$$ (19) -
在考虑精确制导武器采用GPS/INS超紧耦合对GPS接收机抗干扰性能提升的基础上,依据接收机对卫星信号的捕获、跟踪和解调过程以及干扰对接收机不同过程性能的影响,将干扰威力区划分为受扰区、半失效区和失效区,分析了不同干扰威力区下干扰功率随着有效距离的变化关系。在确定出干扰威力区后,结合对GPS/INS超紧耦合精确制导武器所需的连续压制作用距离的分析,对干扰源数量及部署位置进行了建模求解,确保了对GPS/INS超紧耦合精确制导武器导航对抗的有效、高效实施。
Analysis of Jamming Source Deployment to GPS/INS Ultra-Tight Coupling Navigation Countermeasure
-
摘要: GPS/INS组合技术广泛应用于精确制导武器导航中,随着GPS/INS组合导航超紧耦合方式的逐渐成熟,整个导航系统的抗干扰能力显著提升。为了对采用GPS/INS超紧耦合精确制导武器有效实施导航对抗,以GPS接收机不同环节的性能下降指标将干扰形成的威力区用受扰区、半失效区和失效区来进行划分,结合接收机工作过程和GPS/INS超紧耦合对接收机跟踪环结构设计的影响,推导分析了在匹配谱干扰下P(Y)码和M码信号捕获、跟踪和解调性能指标降至划分临界值时接收机射频前端所需的干扰功率。考虑干扰来向与接收天线增益的关系,仿真得到干扰源在不同高度下各威力区发射功率随有效距离的变化关系。在此基础上,对GPS/INS超紧耦合精确制导武器的导航对抗连续压制作用距离进行仿真分析,进而完成对干扰源数量和部署位置的建模求解。分析和解算结果可为载荷和高度受限的升空干扰源在GPS/INS超紧耦合精确制导武器导航对抗中的实际运用提供借鉴和参考。Abstract: Global positioning system/inertial navigation system (GPS/INS) integrated navigation has been widely used in guiding the precision guidance weapons. With the gradual maturity of GPS/INS ultra-tight coupling technology, the anti-jamming capacity of the entire integrated navigation system is improved significantly. In order to effectively implement navigation countermeasures by adopting GPS/INS super-tight coupled precision-guided weapons, divide the jamming power region into disturbed area, half failure area and failure area according to GPS receiver different link’s performance decline indices, and combine the influence of GPS/INS super-tight coupling on the structure design of receiver tracking loop, this paper derives and analyzes the jamming power required at the receiver’s RF front-end when the capture, tracking and demodulation performance of GPS P(Y) code and M code signal down to division critical value under the matching spectrum jamming. Considering the relationship between the direction of arrival (DOA) of jamming and GPS receiver’s antenna gain, the changes of jamming source transmitting power along with effective jamming range about each jamming power region have been simulated and acquired on different blast-off height. Then, the continuous blanket jamming range to precision guidance weapons of adopting GPS/INS ultra-tight coupling has been analyzed quantitatively. Finally, the problem of setting jamming source number and location is modeled and solved. The conclusion achieved can offer a guidance for the practice of limited load and height blast-off platform jamming source implementing navigation countermeasure to precision guidance weapons of adopting GPS/INS ultra-tight coupling.
-
[1] 潘高峰, 王李军, 华军. 卫星导航接收机抗干扰技术[M]. 北京: 电子工业出版社, 2016: 248-249, 259-260. PAN Gao-feng, WANG Li-jun, HUA Jun. Anti-jamming technology of satellite navigation receiver[M]. Beijing: Publishing House of Electronics Industry, 2016: 248-249, 259-260. [2] 谢非, 刘建业, 李荣冰, 等. GPS/INS超紧组合环路信息耦合模型及机理分析[J]. 控制与决策, 2014, 29(4): 611-616. XIE Fei, LIU Jian-ye, LI Rong-bing, et al. Analysis on coupling model and mechanism of loop measurements in an ultra-tight GPS/INS integration[J]. Control and Decision, 2014, 29(4): 611-616. [3] IYIDIR B, OZKAZANC Y. Jamming of GPS receivers[C]//Proceedings of the IEEE 12th Signal Processing and Communications Applications Conference. Kusadasi, Turkey: IEEE, 2004: 747-750. [4] HU Hui, WEI Na. A study of GPS jamming and anti-jamming[C]//The 2nd International Conference on Power Electronics and Intelligent Transportation System. [S.l.]: IEEE, 2009: 388-391. [5] 张帆. 压制式干扰对卫星导航信号的误比特率影响研究[D]. 北京: 中国科学院大学, 2013. ZHANG Fan. Research on effect of blanket jamming on BER of satellite navigation signals[D]. Beijing: The University of Chinese Academy of Sciences, 2013. [6] 张坤, 曾芳玲, 欧阳晓凤, 等. GPS压制干扰效果分析[J]. 通信技术, 2018, 51(11): 2544-2548. doi: 10.3969/j.issn.1002-0802.2018.11.003 ZHANG Kun, ZENG Fang-ling, OUYANG Xiao-feng, et al. Analysis of GPS blanket jamming effects[J]. Communications Technology, 2018, 51(11): 2544-2548. doi: 10.3969/j.issn.1002-0802.2018.11.003 [7] 宋帅, 王新龙. GPS接收机跟踪环的抗干扰性能研究与分析[J]. 航空兵器, 2011(6): 29-35. doi: 10.3969/j.issn.1673-5048.2011.06.008 SONG Shuai, WANG Xin-long. Research and analysis on anti-interference performance of tracking loop for GPS receiver[J]. Aero Weaponry, 2011(6): 29-35. doi: 10.3969/j.issn.1673-5048.2011.06.008 [8] 秦红磊, 柴璐璐, 丛丽. GPS/INS超紧组合抗干扰性能分析[J]. 计算机工程与设计, 2013, 34(1): 333-337. doi: 10.3969/j.issn.1000-7024.2013.01.063 QIN Hong-lei, CHAI Lu-lu, CONG Li. Analysis on anti-jamming of GPS/INS ultra-tight coupled system[J]. Computer Engineering and Design, 2013, 34(1): 333-337. doi: 10.3969/j.issn.1000-7024.2013.01.063 [9] 张康, 李连仲, 颜安. 高动态惯性+卫星深耦合组合导航技术研究[C]//第四届中国卫星导航学术年会. 北京: 中国卫星导航学术年会组委会, 2013. ZHANG Kang, LI Lian-zhong, YAN An. Research on high dynamic deeply integrated INS+GNSS navigation technology[C]//The 4th China Satellite Navigation Conference. Beijing: China Satellite Navigation Academic Annual Meeting Organizing Committee, 2013. [10] BETZ J W, KOLODZIEJSKI K R. Generalized theory of code tracking with an early-late discriminator part II: Noncoherent Processing and Numerical Results[J]. IEEE Trans on Aerospace and Electronic Systems, 2009, 45(4): 1551-1564. [11] 薛磊, 汤俊杰, 张煊滏. 基于接收机跟踪性能的GPS压制干扰效果分析[J]. 现代防御技术, 2011, 39(4): 26-30. doi: 10.3969/j.issn.1009-086x.2011.04.006 XUE Lei, TANG Jun-jie, ZHANG Xuan-fu. Analysis of blanket jamming effect on GPS receiver based on performance of tracking loop of receiver[J]. Modern Defence Technology, 2011, 39(4): 26-30. doi: 10.3969/j.issn.1009-086x.2011.04.006 [12] 马丽, 刘飞, 杨建军. 平流层飞艇载GPS干扰器的能力及部署分析[J]. 现代防御技术, 2012, 40(5): 62-66. doi: 10.3969/j.issn.1009-086x.2012.05.012 MA Li, LIU Fei, YANG Jian-jun. Capacity and disposition analysis of GPS jammers in stratospheric airship[J]. Modern Defence Technology, 2012, 40(5): 62-66. doi: 10.3969/j.issn.1009-086x.2012.05.012 [13] 李武涛, 黄智刚, 肖宏. 干扰对卫星导航接收机跟踪性能的影响分析[J]. 电子设计工程, 2019, 27(8): 119-123. doi: 10.3969/j.issn.1674-6236.2019.08.026 LI Wu-tao, HUANG Zhi-gang, XIAO Hong. Research on the impact of jamming on tracking performance for global navigation satellite system receivers[J]. Electronic Design Engineering, 2019, 27(8): 119-123. doi: 10.3969/j.issn.1674-6236.2019.08.026 [14] 刘宪阳, 崔鹤, 郝云霞. 一种基于GPS C/A码引导的P码捕获方法[J]. 长春理工大学学报(自然科学版), 2015, 38(5): 97-100. LIU Xian-yang, CUI He, HAO Yun-xia. A method of P code acquisition base on GPS C/A code[J]. Journal of Changchun University of Science and Technology (Natural Science Edition), 2015, 38(5): 97-100. [15] KAPLAN E D, HEGARTY C J. Understanding GPS: Principles and applications[M]. Norwood, MA: Artech House, 2006. [16] 武萌, 程旭维, 汤霞清, 等. INS辅助的GNSS接收机信号捕获性能分析[J]. 火力与指挥控制, 2017, 42(2): 97-100. doi: 10.3969/j.issn.1002-0640.2017.02.022 WU Meng, CHENG Xu-wei, TANG Xia-qing, et al. Performance analysis on signal acquisition of INS-aided GNSS Receiver[J]. Fire Control & Command Control, 2017, 42(2): 97-100. doi: 10.3969/j.issn.1002-0640.2017.02.022 [17] TITUS L M, BETZ J W, HEGARTY C J, et al. Intersystem and intrasystem interference analysis methodology[C]//ION GPS/GNSS 2003. Portland, OR: ION, 2003: 2061-2069. [18] 邵连军. 基于导航战的GPS通信干扰仿真与设计[D]. 武汉: 武汉大学, 2005. SHAO Lian-jun. Simulation and design of GPS communications interference based on navigation war[D]. Wuhan: Wuhan University, 2005. -

 点击查看大图
点击查看大图

图(6)
计量
- 文章访问数: 7065
- HTML全文浏览量: 2083
- PDF下载量: 28
- 被引次数: 0






























































































































































