 ISSN
ISSN 


 下载:
下载:


-
杂波环境下的机动目标跟踪问题是雷达领域中重要的研究课题[1-4],其中交互多模型(interacting multiple model –probabilistic, IMM)滤波算法是目前机动目标跟踪中的主流算法[2, 4],概率数据关联(probabilistic data association, PDA)算法是解决杂波环境下单目标跟踪问题的较好算法[1, 5],将PDA算法和IMM算法结合使用,形成IMM-PDA算法,解决杂波环境下机动目标跟踪问题。文献[6-12]都是基于传统的IMM-PDA 算法,通过对机动目标中的各个模型使用数据关联方法进行交互输出。但传统的IMM-PDA算法量测方程中仅包含目标位置信息,没有利用多普勒量测信息。本文根据多普勒量测信息解速度模糊[13-16],得到目标径向速度,然后在目标量测方程中增加径向速度维,将量测方程中的径向速度函数进行泰勒级数展开略去高阶量转为线性函数,同时在点迹关联时增加了径向速度波门,滤除更多的杂波点,利用多普勒量测计算出的径向速度实时更新观测值中的径向速度。因在机动目标跟踪算法中利用了更多量测信息,所以目标跟踪性能比传统IMM-PDA算法有较大提高,体现在目标位置精度和速度精度得到很大提高、位置和速度收敛速度加快。同时本文还分析了多普勒量测误差对跟踪性能的影响,多普勒量测误差越小,目标跟踪性能越好。通过计算机仿真验证了杂波环境下利用多普勒量测的机动目标跟踪算法的有效性。
-
目标的状态方程为:
$${{{X}}_k} = {{{F}}_{k|k - 1}}{{{X}}_{k - 1}} + {{{w}}_{k - 1}}$$ (1) 式中,
${{{X}}_k} = {[{x_k},{\dot x_k},{\ddot x_k},{y_k},{\dot y_k},{\ddot y_k},{z_k},{\dot z_k},{\ddot z_k}]^{\rm{T}}}$ ;$({x_k},{y_k},{z_k})$ 、$({\dot x_k},{\dot y_k},{\dot z_k})$ 、$({\ddot x_k},{\ddot y_k},{\ddot z_k})$ 分别表示目标在k时刻XYZ轴上的位置、速度和加速度;${{{F}}_{k|k - 1}}$ 为目标状态转移矩阵;${{{w}}_{k - 1}}$ 为均值为0、方差为$\sigma _w^2$ 的白噪声,其协方差矩阵为${{Q}}$ 。$${{Q}} = \sigma _w^2\left[ {\begin{array}{*{20}{c}} {{T^3}/3}&{{T^2}/2}&0&0&0&0 \\ {{T^2}/2}&T&0&0&0&0 \\ 0&0&{{T^3}/3}&{{T^2}/2}&0&0 \\ 0&0&{{T^2}/2}&T&0&0 \\ 0&0&0&0&{{T^3}/3}&{{T^2}/2} \\ 0&0&0&0&{{T^2}/2}&T \end{array}} \right]$$ 式中,T代表采样间隔。
目标的量测方程为:
$${{Z}}_k^{} = {{h}}({{{X}}_k}) + {{\tau}} _k^{}$$ (2) 式中,
${{{Z}}_k} = {[{x_k},{y_k},{z_k},{v_r}_k]^{\rm{T}}}$ 为k时刻的观测值;${v_r}_k$ 为目标径向速度,在目标量测方程中增加径向速度;${{h}}( \cdot)$ 为观测函数;${{\tau}} _k^{}$ 代表k时刻的观测噪声。 -
对于连续波雷达,当速度不模糊,则径向速度为:
$${v_r} = \frac{{{f_d}}}{{2\lambda }} = \frac{{c{f_d}}}{{2{f_c}}}$$ (3) 式中,
${f_d}$ 为目标的多普勒频移;${f_c}$ 为雷达载频;$\lambda $ 为雷达波长;$c$ 为电磁波传播速度。对于脉冲雷达,可以采用双重频方法解速度模糊,假设脉冲重复频率分别为
${f_{r1}}$ 和${f_{r2}}$ ,测得的目标多普勒频移分别为${f_{d1}}$ 和${f_{d2}}$ ,则目标的真正多普勒频移为[13]:$${f_d} = \left\{ {\begin{aligned} & {(({f_{d2}} - {f_{d1}}) + {f_{r2}}) {f_{r1}}/({f_{r1}} - {f_{r2}}) + {f_{d1}}}&{{f_{d1}} > {f_{d2}}}\\ & {({f_{d2}} - {f_{d1}}) {f_{r1}}/({f_{r1}} - {f_{r2}}) + {f_{d1}}}&{{f_{d1}} < {f_{d2}}}\\ & {{f_{d1}}}&{{f_{d1}} = {f_{d2}}} \end{aligned}} \right.$$ (4) 将式(4)计算出的多普勒频移带入式(3),得到目标的径向速度。通过雷达脉冲重复频率和载频的合理选择,就能保证由多普勒频移计算出的径向速度具有较高的测速精度,一般条件下雷达设计时通过多普勒频移计算出的径向速度精度都较高。
-
观测函数中的径向速度表达式为:
$$ \begin{aligned} & {V_{rk}} = {{\dot x}_k}{x_k}\Big/\sqrt {{x_k}^2 + {y_k}^2 + {z_k}^2} + {{\dot y}_k}{y_k}\Big/\sqrt {{x_k}^2 + {y_k}^2 + {z_k}^2} + \\ & \qquad\qquad\quad {{\dot z}_k}{z_k}\Big/\sqrt {{x_k}^2 + {y_k}^2 + {z_k}^2} \\ \end{aligned} $$ 将量测方程写成矩阵形式为:
$${{{Z}}_{k|k - 1}} = {{h}}({{\hat {{X}}}_{k|k - 1}})$$ (5) 将径向速度以
${{\overset{\wedge }{\mathop{{{X}}}}\,}_{k|k-1}}$ 为中心进行泰勒级数展开略去高阶分量,量测方程转为线性函数[17]。$$\begin{aligned} & \qquad\qquad\quad {{H}}(k) = \frac{{\partial {{h}}}}{{\partial {{X}}}}{\bigg|_{{{X}} = {{\overset{\wedge }{\mathop{{{X}}}}\,}_{k|k-1}}}} = \\ & \left[ {\begin{array}{*{20}{c}} 1&0&0&0&0&0&0&0&0 \\ 0&0&0&1&0&0&0&0&0 \\ 0&0&0&0&0&0&1&0&0 \\ {{H_{41}}}&{{H_{42}}}&{{H_{43}}}&{{H_{44}}}&{{H_{45}}}&{{H_{46}}}&{{H_{47}}}&{{H_{48}}}&{{H_{49}}} \end{array}} \right] \\ \end{aligned} $$ 其中,
$$\begin{aligned} & {H_{41}} = [{\hat{\dot{x}}_{k|k - 1}}({{\hat y}^2}_{k|k - 1} + {{\hat z}^2}_{k|k - 1}) - {\hat{\dot{y}}_{k|k - 1}}{{\hat x}_{k|k - 1}}{{\hat y}_{k|k - 1}} \\ & \;\;- {\hat{\dot{z}}_{k|k - 1}}{{\hat x}_{k|k - 1}}{{\hat z}_{k|k - 1}}]/{({{\hat x}^2}_{k|k - 1} + {{\hat y}^2}_{k|k - 1} + {{\hat z}^2}_{k|k - 1})^{3/2}} \\ \end{aligned} $$ $${H_{42}} = {\hat x_{k|k - 1}}/{({\hat x^2}_{k|k - 1} + {\hat y^2}_{k|k - 1} + {\hat z^2}_{k|k - 1})^{1/2}}$$ $$\begin{aligned} & {H_{44}} = [{\hat{\dot{y}}_{k|k - 1}}({{\hat x}^2}_{k|k - 1} + {{\hat z}^2}_{k|k - 1}) - {\hat{\dot{x}}_{k|k - 1}}{{\hat x}_{k|k - 1}}{{\hat y}_{k|k - 1}} \\ & \;- {\hat{\dot{z}}_{k|k - 1}}{{\hat y}_{k|k - 1}}{{\hat z}_{k|k - 1}}]/{({{\hat x}^2}_{k|k - 1} + {{\hat y}^2}_{k|k - 1} + {{\hat z}^2}_{k|k - 1})^{3/2}} \\ \end{aligned} $$ $${H_{45}} = [{\hat y_{k|k - 1}}/{({\hat x^2}_{k|k - 1} + {\hat y^2}_{k|k - 1} + {\hat z^2}_{k|k - 1})^{1/2}}$$ $$\begin{aligned} & {H_{47}} = [{\hat{\dot{z}}_{k|k - 1}}({{\hat x}^2}_{k|k - 1} + {{\hat y}^2}_{k|k - 1}) - {\hat{\dot{x}}_{k|k - 1}}{{\hat x}_{k|k - 1}}{{\hat z}_{k|k - 1}} \\ & \;\; - {\hat{\dot{y}}_{k|k - 1}}{{\hat y}_{k|k - 1}}{{\hat z}_{k|k - 1}}]/{({{\hat x}^2}_{k|k - 1} + {{\hat y}^2}_{k|k - 1} + {{\hat z}^2}_{k|k - 1})^{3/2}} \\ \end{aligned} $$ $${H_{48}} = {\hat z_{k|k - 1}}/{({\hat x^2}_{k|k - 1} + {\hat y^2}_{k|k - 1} + {\hat z^2}_{k|k - 1})^{1/2}}$$ $$ {H_{43}} = 0,\;{H_{46}} = 0,\;{H_{49}} = 0 $$ -
在点迹关联时增加径向速度波门,滤除更多杂波点。落入关联波门内的量测点为有效量测,即:
$${{{Z}}_k} = \{ {{{z}}_k}|({({{z}}_k^{} - {{z}}_{k|k - 1}^{})^{\rm{T}}}{{S}}_k^{ - 1}({{z}}_k^{} - {{z}}_{k|k - 1}^{}) \leqslant {{\gamma}} )\} $$ (6) 式中,
${{{Z}}_k}$ 为有效量测的集合;${{{z}}_k}$ 为实际量测值;${{z}}_{k|k - 1}^{}$ 为量测预测值;${{{S}}_k}$ 为量测预测值的协方差矩阵;因为量测方程中增加了径向速度维,所以${{\gamma}} $ 服从自由度为4的${\chi ^2}$ 分布,可由目标的检测概率确定。 -
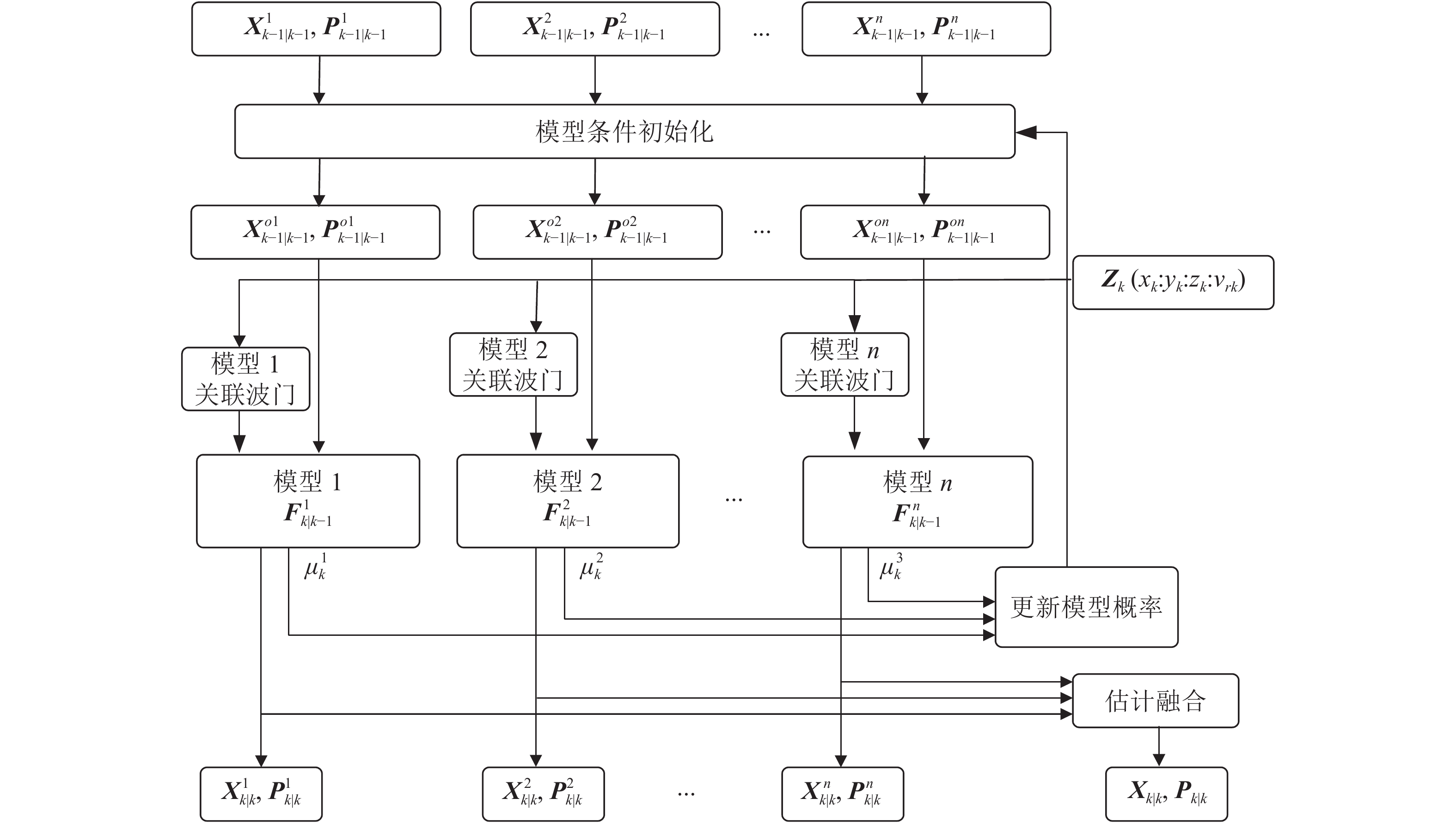
基于多普勒量测的IMM-PDA算法流程如图1所示。假设IMM-PDA算法有n个模型,在k时刻由多普勒量测测出的径向速度与目标位置组成的目标观测值为
${{{Z}}_k} = {[{x_k},{y_k},{z_k},{v_r}_k]^{\rm{T}}}$ 。对于模型$i \in n$ ,利用多普勒量测的IMM-PDA算法步骤如下:
图 1 基于多普勒量测的IMM-PDA算法流程图
1)模型交互计算
交互概率、交互输入的状态估计、交互输入的协方差分别为:
$${{u}}_{k - 1}^{j|i} = {{\text π} _{ji}}{{u}}_{k - 1}^j/{{u}}_{k|k - 1}^i$$ (7) $${{X}}_{k - 1|k - 1}^{oi} = \sum\limits_{j = 1}^m {{{X}}_{k - 1|k - 1}^j{{u}}_{k - 1}^{j|i}} $$ (8) $${{P}}_{k - 1|k - 1}^{oi} = \sum\limits_{j = 1}^m {{{u}}_{k - 1}^{j|i}} [{{P}}_{k - 1|k - 1}^j + {\bf{\Delta}} _{k - 1}^{(i,j)}{({\bf{\Delta}} _{k - 1}^{(i,j)})^{\rm T}}]$$ (9) 式中,
${{u}}_{k|k - 1}^i = \displaystyle\sum\limits_{j = 1}^m {{{\text π} _{ji}}{{u}}_{k - 1}^j} $ ;${\bf{\Delta}} _{k - 1}^{(i,j)} = {{X}}_{k - 1|k - 1}^i - {{X}}_{k - 1|k - 1}^{oj}$ 2)状态预测
预测均值和预测误差协方差分别为:
$${{X}}_{_{k|k - 1}}^i = {{F}}_{_{k|k - 1}}^i{{X}}_{_{k - 1|k - 1}}^{oi}$$ (10) $${{P}}_{_{k|k - 1}}^i = {{F}}_{_{k|k - 1}}^i{{P}}_{_{k - 1|k - 1}}^{oi}({{F}}_{_{k|k - 1}}^i)_{}^{\rm T} + {{Q}}_{_{k - 1}}^i$$ (11) 3)点迹关联
计算k时刻第t个量测源于目标的关联概率
$\,\beta _k^{(t)}$ (互联概率):$$\beta _k^{(t)} = \left\{ {\begin{array}{*{20}{c}} {\varsigma \dfrac{{(1 - {P_d})\lambda }}{{{P_d}}}\sqrt {2{\text π} {{S}}_{_k}^i} \begin{array}{*{20}{c}} {}&{t = 0} \end{array}} \\ {\varsigma \exp \left( - \dfrac{1}{2}{{v}}_k^{(t){\rm T}}{{S}}_{_k}^i{{v}}_k^{(t)}\right)\begin{array}{*{20}{c}} {}&{1 \leqslant t \leqslant {m_k}} \end{array}} \end{array}} \right.$$ (12) 式中,
$\varsigma $ 是一个保证$\displaystyle\sum\limits_{t = 0}^{{m_k}} {{\beta _t}} = 1$ 的常数;${P_d}$ 为目标的检测概率;$\lambda $ 为跟踪波门内的虚警密度;${{v}}_k^{(t)} = {{z}}_k^{(t)} - {{h}}({{\hat {{X}}}_{k|k - 1}})$ 为第t个测量值对应的新息;${{S}}_{_k}^i = {{H}}_k^i{{P}}_{_{k|k - 1}}^i{({{H}}_k^i)^{\rm{T}}} + {{R}}_{_k}^i$ 为模型$i$ 的新息协方差矩阵;${{R}}_{_k}^i$ 为观测噪声协方差矩阵;${{z}}_k^{(t)}$ 为k时刻在关联波门内的第t个量测值;${m_k}$ 为k时刻落入关联波门的量测个数。则模型$i$ 的综合量测为:$${{z}}_k^i = \sum\limits_{t = 0}^{{m_k}} {{{z}}_k^{(t)}} \beta _k^{(t)}$$ (13) 4)状态更新
计算增益矩阵、状态更新、协方差更新:
$${{{K}}_k} = {{P}}_{_{k|k - 1}}^i{({{H}}_k^i)^{\rm{T}}}{({{S}}_k^i)^{ - 1}}$$ (14) $${{X}}_{_{k|k}}^i = {{X}}_{_{k|k - 1}}^i + {{K}}_k^i{{d}}_k^i$$ (15) $${{P}}_{_{k|k}}^i = [{{{I}}^i} - {{K}}_{_k}^i{{H}}_{_k}^i]{{P}}_{_{k|k - 1}}^i$$ (16) 式中,
${{d}}_k^i = {{z}}_k^i - {{H}}_k^i{{X}}_{k|k - 1}^i$ 5)模型概率更新
计算模型似然概率和更新模型有效概率:
$${{\varLambda}} _k^i = N(d_k^i,0,{{S}}_k^i)$$ (17) $${{u}}_k^i = {{u}}_{k|k - 1}^i{{\varLambda}} _k^i \bigg/\sum\limits_{j = 1}^m {{{u}}_{k|k - 1}^j{{\varLambda}} _k^j} $$ (18) 6)进行状态估计
计算最终状态估计和最终估计协方差:
$${{{X}}_{k|k}} = \sum\limits_{i = 1}^m {{{X}}_{k|k}^i} {{u}}_k^i$$ (19) $${{P}}_{k|k}^{} = \sum\limits_{j = 1}^m {{{u}}_k^j[{{P}}_{k|k}^i + ({{X}}_{k|k}^i - {{X}}_{k|k}^{}){{({{X}}_{k|k}^i - {{X}}_{k|k}^{})}^{\rm{T}}}]} $$ (20) -
为验证本文算法的有效性,将基于多普勒量测的IMM-PDA算法与传统的IMM-PDA算法进行了性能对比,目标运动场景描述如下:目标高度1 000 m,从初始位置20, 15 km以初速100, 200 m/s先作匀速运动,持续45 s,然后以角频率0.04作转弯机动,持续20 s,然后以15 m/s2加速度,持续35 s,完成整个航路,如图2所示为目标运动航迹。同时按照文献[5]提供的方法在观测值为中心的正方形内产生均匀分布的量测点迹,仿真中观测间隔为1 s,径向速度误差取1, 5 m/s,径向速度随航路变化如图2所示。X轴和Y轴观测误差为22 m,作100次蒙特卡罗仿真。仿真中匀速(constant velocity, CV)模型、匀速转弯模型(constant turn model, CT)的噪声强度分别为0.01和0.1,初始有效概率都为
$[0.85\; 0.15]^{\rm T} $ ,转移概率矩阵为$\left[\!\!\! {\begin{array}{*{20}{c}} {0.7}&{0.3} \\ {0.3}&{0.7} \end{array}}\!\!\! \right]$ 。
图 2 目标运动轨迹
利用多普勒量测的IMM-PDA算法与传统的IMM-PDA算法在目标空间位置的均方根误差(RMSE)、速度均方误差和误差收敛速度等方面进行性能对比。
目标空间位置均方根误差为:
$${\rm{RMS}}{{\rm{E}}_{{\rm{p}}k}} = \sqrt {\frac{1}{N}\sum\limits_{i = 1}^N {[{{({x_k} - x_k^i)}^2} + {{({y_k} - y_k^i)}^2}]} } $$ (21) 目标速度均方根误差为:
$${\rm{RMS}}{{\rm{E}}_{{\rm{v}}k}} = \sqrt {\frac{1}{N}\sum\limits_{i = 1}^N {[{{(\dot x_k^{} - \dot x_k^i)}^2} + {{(\dot y_k^{} - \dot y_k^i)}^2}]} } $$ (22) 式中,N为蒙特卡罗实验次数;
$(x_k^i,y_k^i)$ 、$(\dot x_k^i,\dot y_k^i)$ 分别为k时刻第$i$ 次实验估计的目标位置和目标速度。图3为径向速度随航路变化曲线,既能反映真实的径向速度变化,也能反映径向速度误差取1 m/s和5 m/s时径向速度测量值的变化。
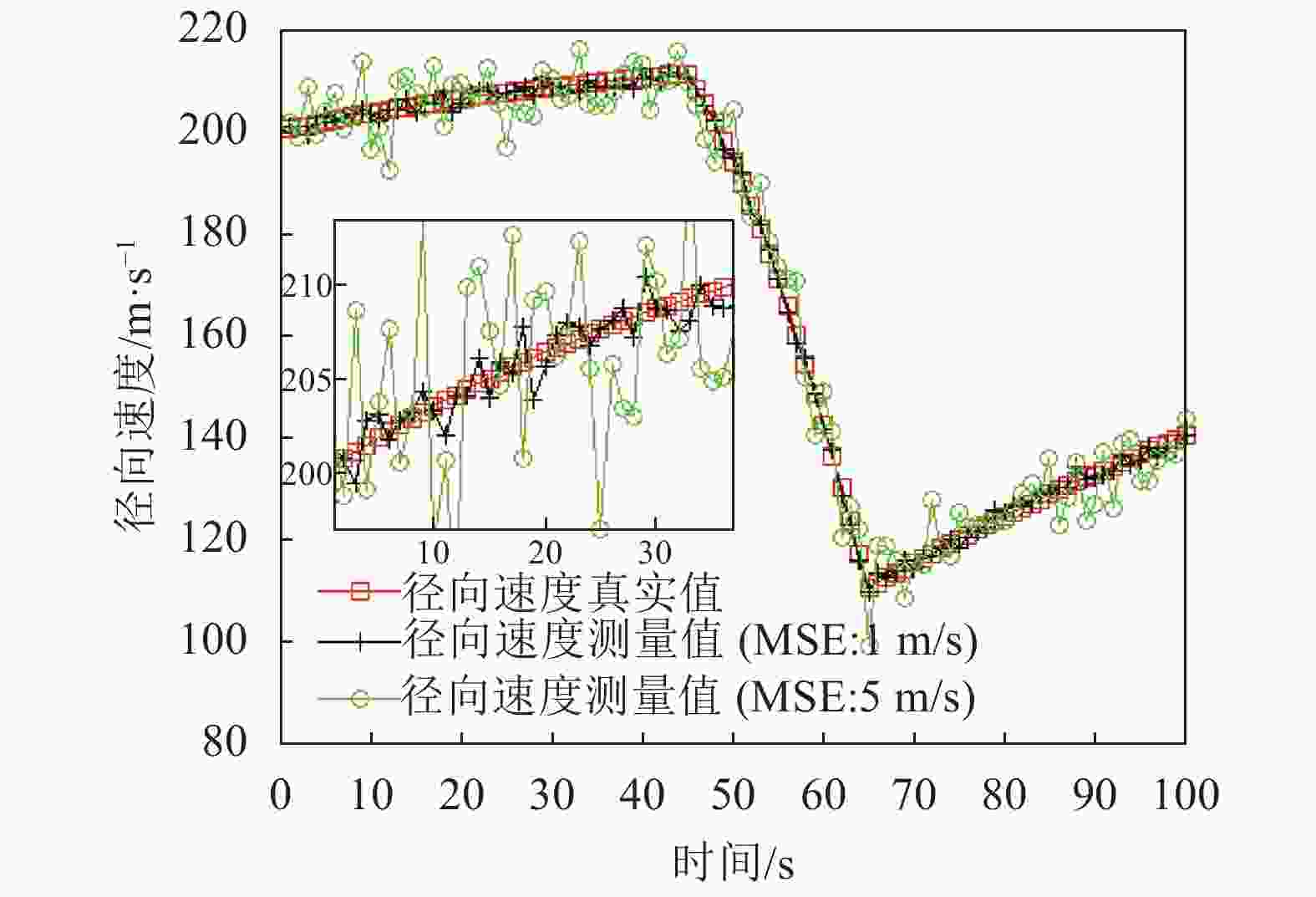
图 3 径向速度变化曲线
从图4目标位置均方根误差曲线得出本文提出的算法随着采样时间变长,目标位置均方根误差逐步减小,相比传统的IMM-PDA算法,目标位置均方根误差更小且收敛速度更快。传统的IMM-PDA算法目标位置均方根误差为18 m,本算法在径向速度误差为5 m/s时,目标位置均方根误差为12 m;径向速度误差为1 m/s时,目标位置均方根误差为8 m。所以基于多普勒量测的机动目标跟踪算法提高了目标位置跟踪精度。
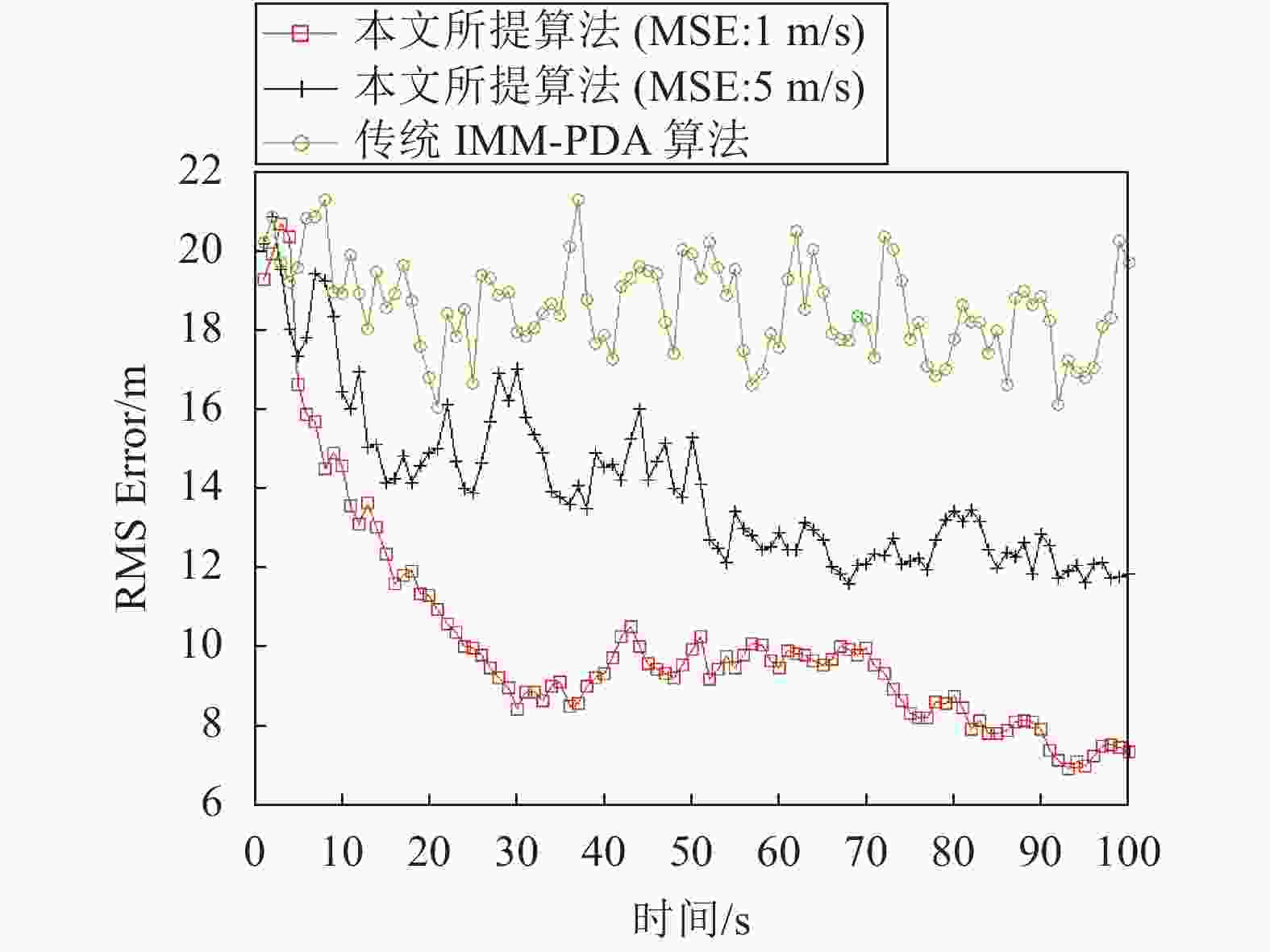
图 4 目标位置均方根误差曲线
从图5目标速度均方根误差曲线可以得出本文提出的算法随着采样时间变长,目标速度均方根误差逐步减小,相比传统的IMM-PDA算法,目标速度均方根误差更小且收敛速度更快。传统的IMM-PDA算法目标速度均方根误差为8 m/s,用本算法在径向速度误差为5 m/s时,目标速度均方根误差为3 m/s;径向速度误差为1 m/s时,目标速度均方根误差为0.4 m/s。所以基于多普勒量测的机动目标跟踪算法也提高了目标速度精度。
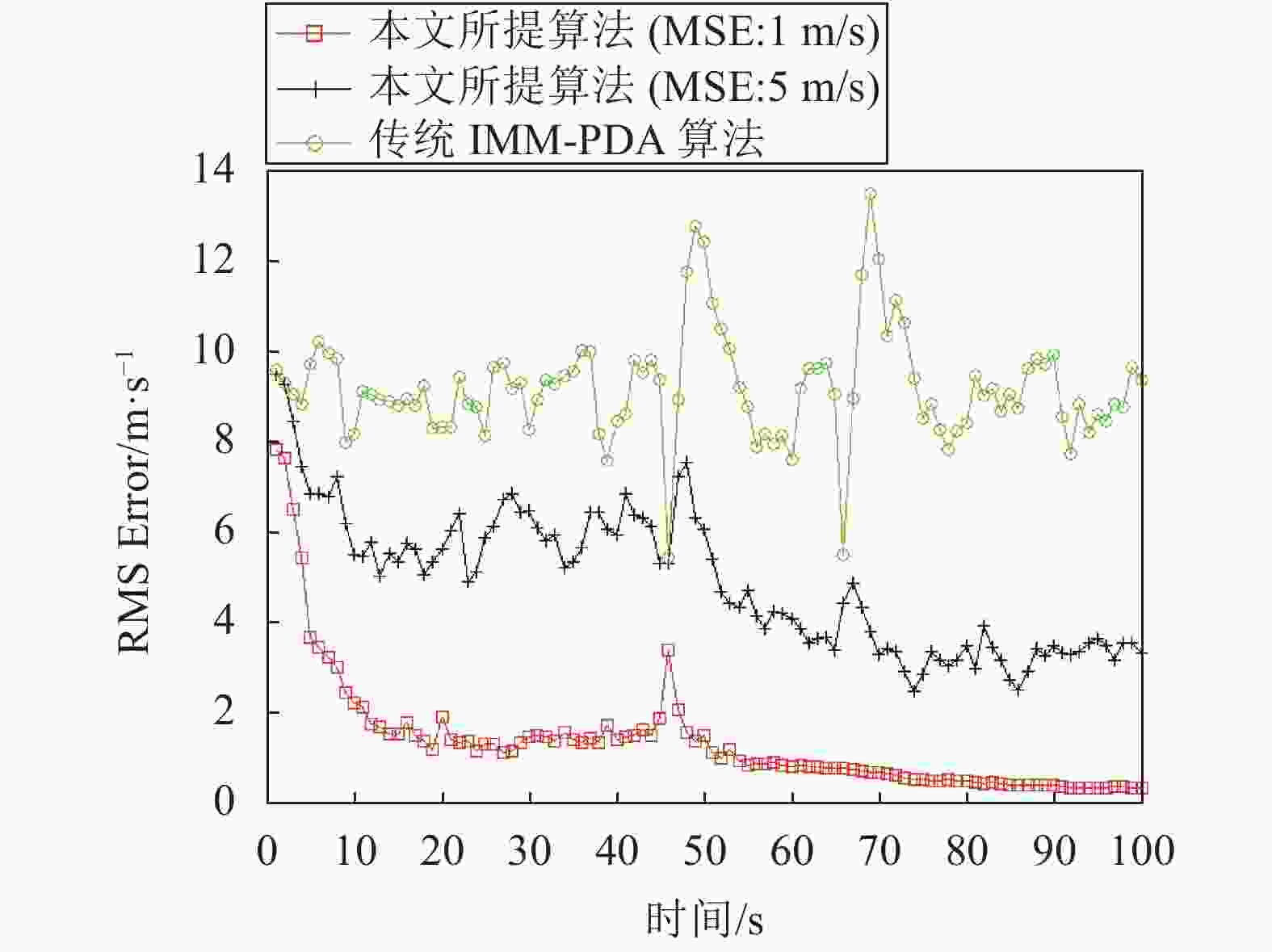
图 5 目标速度均方根误差曲线
本文同时分析了多普勒量测误差对跟踪精度的影响,由式(3)得出,在同一雷达载频下目标多普勒频移与径向速度成正比,多普勒的变化体现为径向速度的变化。从图4和图5可以看出,目标径向速度误差对目标位置的均方根误差和速度均方误差有影响,径向速度误差由5 m/s变为1 m/s时,目标位置均方根误差由12 m变为8 m,目标速度均方根误差由3 m/s变为0.4 m/s。所以得出结论:径向速度误差越小,目标位置的均方根误差和速度均方误差越小,收敛速度越快。
综上,在杂波环境下利用多普勒量测的机动目标跟踪算法,其目标位置均方根误差、速度均方根误差和误差收敛方面都优于传统IMM-PDA算法,而且多普勒量测误差越小,目标位置精度和速度精度越高。
-
杂波环境下基于多普勒量测的机动目标跟踪算法,相比传统的IMM-PDA算法,目标位置精度和速度精度得到提高,目标跟踪性能得到很大改善,而且算法收敛速度更快,同时多普勒测量误差对目标跟踪性能有影响,多普勒测量误差越小,目标跟踪性能越好。
A Method for Maneuvering Target Tracking in Clutter
-
摘要: 针对杂波环境下的机动目标跟踪问题,提出了一种利用多普勒量测的机动目标跟踪算法。该方法首先通过多普勒量测解目标径向速度模糊,然后在目标量测方程中增加了径向速度维,将量测方程中的径向速度函数进行泰勒级数展开略去高阶量转为线性函数,同时在点迹关联时增加了径向速度波门,滤除更多的杂波点,利用多普勒量测计算出的径向速度实时更新观测值中的径向速度。通过计算机仿真,该算法相比传统算法提高了目标位置精度、速度精度和收敛速度。同时还分析了多普勒量测误差对目标跟踪性能的影响,多普勒量测误差越小,目标跟踪性能越好。Abstract: Aiming at the problem of maneuvering target tracking under the clutter environments, we propose a method for the maneuvering target tracking using the Doppler measurement. In our method, the radial velocity, which was estimated with the Doppler measurement, is first introduced to the measurement equation of the target, and then it is linearized after omitting the high-order terms in the Taylor series expansion. The radial velocity gate is added to the radar targets in the association to filter out clutter points. The radial velocity of the target observed is updated with the radial velocity calculated by the Doppler measurement. The simulated results demonstrate that the target location accuracy, velocity accuracy, and the convergence speed of proposed algorithm are all improved compared with those of traditional algorithms. In addition, the influence of the Doppler measurement error on the target tracking performance is also analyzed and the result indicates that the smaller the Doppler measurement error, the better the target tracking performance.
-
Key words:
- clutter /
- Doppler measurement /
- maneuvering target /
- radial velocity
-
[1] CHALVATZAKI G, PAPAGEORGIOU X S, TZAFESTAS C S, et al. Augmented human state estimation using interacting multiple model particle filters with probabilistic data association[J]. IEEE Robotics and Automation Letters, 2018, 3(3): 1872-1879. doi: 10.1109/LRA.2018.2800084 [2] COSME L B, CAMINHAS W M, D’ANGELO M F S V, et al. A novel fault-prognostic approach based on interacting multiple model filters and fuzzy systems[J]. IEEE Transactions on Industrial Electronics, 2019, 66(1): 519-528. doi: 10.1109/TIE.2018.2826449 [3] 陈帅霖, 罗丰, 张林让, 等. 采用动态规划的机动目标检测前跟踪算法[J]. 西安电子科技大学学报(自然科学版), 2017, 44(5): 39-45. CHEN Shuai-lin, LUO Feng, ZHANG Lin-rang, et al. Maneuvering target track-before-detect method using dynamic programming[J]. Journal of Xidian University, 2017, 44(5): 39-45. [4] SALAM A O, SHERIFF R E, AL-ARAJI S R, et al. Adaptive interacting multiple model-Kalman filter for multitaper spectrum sensing in cognitive radio[J]. Electronics Letters, 2018, 54(5): 321-322. doi: 10.1049/el.2017.3752 [5] 何友, 修建娟, 张晶炜, 等. 雷达数据处理及应用[M]. 第2版. 北京: 电子工业出版社, 2009. HE You, XIU Jian-juan, ZHANG Jing-wei, et al. Radar data processing with applications[M]. 2nd ed. Beijing: Publishing House of Electronics Industry, 2009. [6] DUFOUR F, MARITON M. Tracking a 3D maneuvering target with passive sensors[J]. IEEE Transactions on Aerospace & Electronic Systems, 2002, 27(4): 725-739. [7] 程婷, 何子述, 李亚星. 一种具有自适应关联门的杂波中机动目标跟踪算法[J]. 电子与信息学报, 2012, 34(4): 865-870. CHENG Ting, HE Zi-shu, LI Ya-xing. A maneuvering target tracking algorithm with adaptive association gate in clutters[J]. Journal of Electronics and Information Technology, 2012, 34(4): 865-870. [8] 靳标, 纠博, 苏涛, 等. 一种用于杂波中机动目标跟踪的自适应关联波门设计方法[J]. 西安交通大学学报, 2014, 48(10): 35-41. doi: 10.7652/xjtuxb201410006 JIN Biao, JIU Bo, SU Tao, et al. A method to design adaptive correlating gate for maneuering target tracking in clutter[J]. Journal of Xi’an Jiaotong University, 2014, 48(10): 35-41. doi: 10.7652/xjtuxb201410006 [9] WANG J T, FAN B, LI Y P, et al. A novel interacting multiple model particle filter for maneuvering target tracking in clutter[J]. Progress in Electromagnetics Research C, 2013, 35(1): 177-191. [10] BLOM H A P, BLOEM E A. Exact Bayesian filter and joint IMM coupled PDA tracking of maneuvering targets from possibly missing and false measurements[J]. Automatica, 2006, 42(1): 127-135. doi: 10.1016/j.automatica.2005.08.008 [11] MUSICKI D, SUVOROVA S. Tracking in clutter using IMM-IPDA-based algorithms[J]. Aerospace & Electronic Systems IEEE Transactions on, 2008, 44(1): 111-126. [12] HWANG I, SEAH C E, LEE S, et al. A study on stability of the interacting multiple model algorithm[J]. IEEE Transactions on Automatic Control, 2017, 62(2): 901-906. doi: 10.1109/TAC.2016.2558156 [13] ZHU S, LIAO G, QU Y, et al. A new slant-range velocity ambiguity resolving approach of fast moving targets for sar system[J]. IEEE Transactions on Geoscience and Remote Sensing, 2010, 48(1): 432-451. doi: 10.1109/TGRS.2009.2027698 [14] SAKAMOTO T, MATSUOKA A, YOMO H. Estimation of doppler velocities from sub-nyquist ultra-wideband radar measurements[J]. IEEE Sensors Journal, 2016, 16(23): 8557-8565. [15] RENGA A, MOCCIA A. Use of doppler parameters for ship velocity computation in sar images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2016, 54(7): 3995-4011. doi: 10.1109/TGRS.2016.2533023 [16] GUO J, LI Z F, BAO Z. Adaptive clutter suppression and resolving of velocity ambiguities for an experimental three-channel airborne synthetic aperture radar-ground moving target indication system[J]. IET Radar, Sonar & Navigation, 2011, 5(4): 426-435. [17] 张怀根, 张林让, 吴顺君. 利用径向速度观测值提高目标跟踪性能[J]. 西安电子科技大学学报(自然科学版), 2005, 32(5): 667-670. ZHANG Huai-gen, ZHANG Lin-rang, WU Shun-jun. The use of radial velocity to improve the performance of target tracking[J]. Journal of Xidian University, 2005, 32(5): 667-670. -

 点击查看大图
点击查看大图
图(5)
计量
- 文章访问数: 6176
- HTML全文浏览量: 2030
- PDF下载量: 53
- 被引次数: 0

















































































