 ISSN
ISSN 


 下载:
下载:
-
能源短缺、环境污染问题日益严重,世界各国开始重视具有低噪声、零排放、高效和节能等显著优点的电动汽车的研究和开发。电动汽车系统结构复杂,需要应对各种情况和突发事件,这就要求电动汽车拥有足够的可靠性和安全性。并且,随着控制系统自动化程度的提高,容错控制成为近年来的一个热点。对于电动汽车而言,容错控制包括执行器故障容错、控制器故障容错和传感器故障容错。执行器故障如具有容错能力的电机或是逆变器,控制器故障容错如采用冗余控制系统双芯片控制器,传感器故障容错如用状态观测器代替传感器。传感器故障容错控制不需要改变电机和控制器结构,很容易实现并应用到现有电动汽车中。本文主要针对电机转速估计的常见方法进行综述。目前,已有一些关于电机转速估计的综述类文献,这些文献对现有的估算方法的分析与论述各有侧重,或是针对不同类型的电机[1];或是针对不同的速度辨识方法分类说明现有的估算算法[2];或是基于不同的控制算法;或是针对电机低速运行。本文对目前常见的无速度传感器电机控制方法进行了一个较为全面的介绍,包括了近年的一些新型算法,并对未来的发展趋势做出展望。
电机作为一个复杂的非线性控制对象,获得其准确的物理参数比较困难,物理参数包括定子电阻、电感、转动惯量等,永磁电机还包括永磁体磁链。而观测器所建立的数学模型精度与这些参数的准确程度有关,并且影响到估算的准确性。同时,高性能控制要求控制系统具有一定的抗噪能力。因此,将常见的转速估计算法按照其参数的鲁棒性和系统抗干扰能力分类:1)完全依赖电机参数和电磁方程;2)部分依赖电机参数和电磁方程;3)独立于电机参数和电磁方程。
-
根据电机的电压方程和检测到的电流电压值,基于电机的电磁模型计算反电动势,然后通过反电动势求得转子位置和速度。这一类算法通过直接计算得到反电动势,因此不需要比例积分控制器(PI)或是自适应闭环调节控制,属于转速开环估算,容易实现,但是参数鲁棒性差。并且采用正切函数获得转子位置,导致算法的抗噪能力弱。
以永磁电机为例,式(1)给出电机在静止坐标系下的电磁方程,下标αβ表示静止坐标系,dq表示旋转坐标系,Rs为定子电阻,ωr和θ分别表示转速和转子位置。式(1)中只有转速和转子位置是未知量,如果知道转子初始位置,知道一个转速和转子位置就能计算出另外一个。
$$\begin{split} & \left[ {\begin{array}{*{20}{c}} {{u_\alpha }} \\ {{u_\beta }} \end{array}} \right] = \left[ {\begin{array}{*{20}{c}} {{R_s} + p{L_d}}&{{\omega _r}({L_d} - {L_q})} \\ { - {\omega _r}({L_d} - {L_q})}&{{R_s} + p{L_d}} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {{i_\alpha }} \\ {{i_\beta }} \end{array}} \right] + \\ & \left[ {({L_q} - {L_d})({\omega _r}{i_d} - p{i_q})} \right]\left[ {\begin{array}{*{20}{c}} { - \sin \theta } \\ {\cos \theta } \end{array}} \right] + {\omega _r}{\psi _m}\left[ {\begin{array}{*{20}{c}} { - \sin \theta } \\ {\cos \theta } \end{array}} \right] \end{split} $$ (1) -
转速的开环估算静差大,对参数变化和环境噪音敏感,而基于自适应原理的转速观测器能够提高参数鲁棒性和系统抗噪能力。基于自适应原理的估算算法主要有:1) 模型参考自适应(MRAS);2) 龙伯格观测器(LO);3) 扩展的卡尔曼滤波(EKF);4) 滑模观测器(SMO)。
-
基于模型参考自适应法的基本原理是用包含待估计变量的可调模型按一定的自适应律跟随参考模型,其基本原理框图如图1所示。当两个模型的输出相等时,就认为两个模型等价,并且认为此时转速的估算值是准确的。其中,自适应律依据Popov稳定性原理给出,以保证系统的收敛性和全局稳定性。

图 1 MRAS估算系统框图
两个模型的输出误差是判断MRAS估算是否准确的依据,转子磁链[3]、反电动势[4]、无功功率和电流都可以作为状态量输出。MRAS适用于异步和永磁同步电机,其中永磁电机多采用电流量作为可调模型的输出量。
可调模型按照实际电机模型建模,因此电机模型参数的准确性决定MRAS转速估算的准确程度,从而影响到无速度传感器算法的控制精度。尽管自适应算法使得系统具有一定的参数鲁棒性,但是MRAS对参数的变化仍然十分敏感,尤其是定子电阻。由于电机运行过程中参数受到温度环境等多方面的影响会与标称值不符,使得MRAS算法在低速时估算误差较大。可以通过对定子电阻进行在线辨识,以提高控制精度和系统稳定性,并且使算法能够适用于低速区。
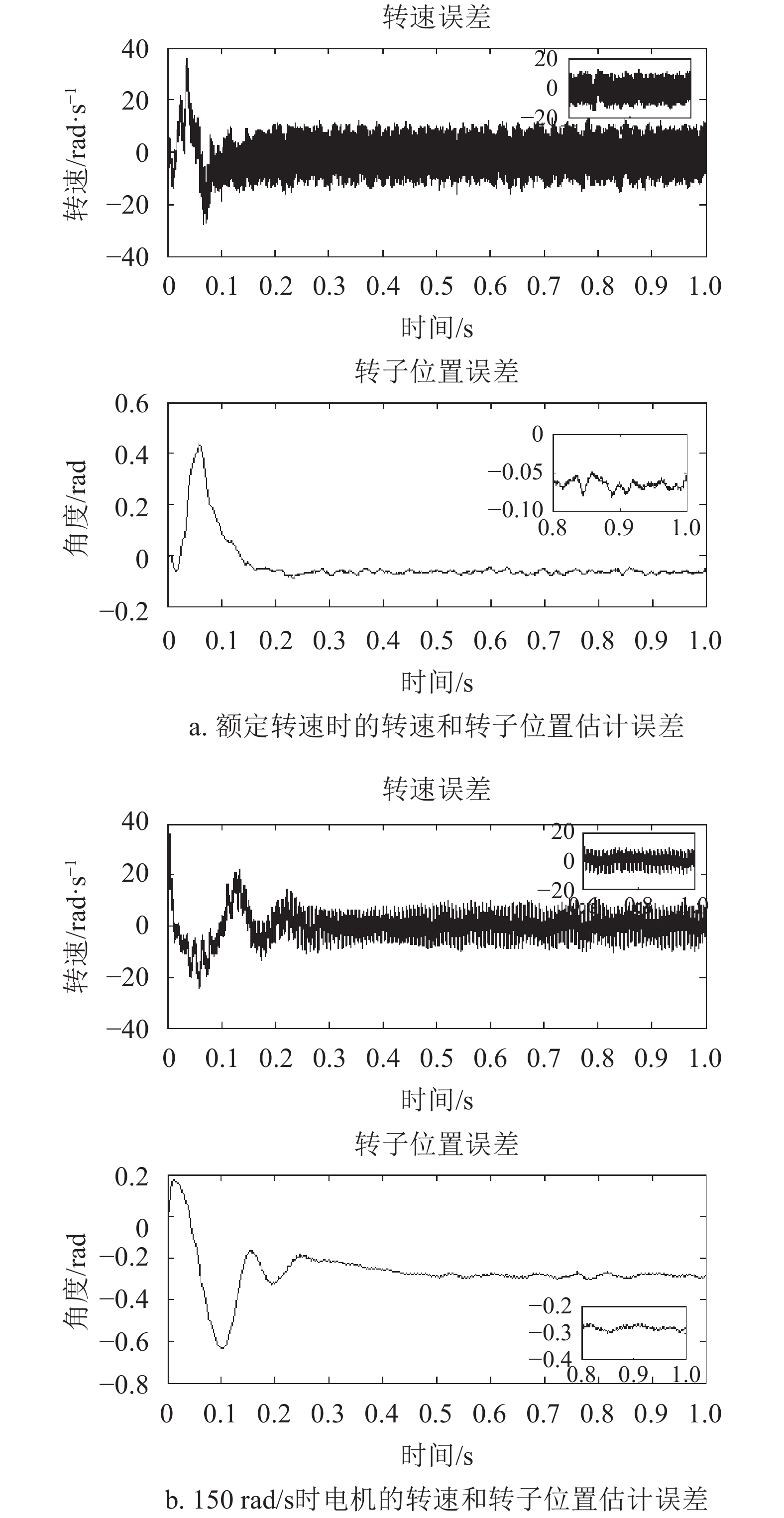
本文在MATLAB/Simulink环境下,对采用基于矢量控制的MRAS无速度传感器控制算法的1.1 kW的永磁同步表面式电机进行仿真。额定期望转速下电机的实际转速和估算转速如图2a所示。当期望转速给定为150 rad/s时,仿真结果如图2b,可以看出,在较低转速区电机转子位置估算误差明显增大,动态性能下降。随着期望转速的进一步下降,估算误差增大,系统可能趋于不稳定状态。

图 2 不同转速下电机的转速和转子位置估计误差
与MRAS不同,其他类型的转速观测器的速度估算多是基于反电动势观测[5-7]或是磁链观测[8]。当电机转速过低时,反电动势很小,此时,观测器观测到的反电动势误差大,导致转速的估计误差增大。所以基于反电动势的观测器法不适用于零速低速时的转速估算。文献[8]中采用磁链观测以计算转速,由式(2)可知基于磁链观测的转速估算也不适用于零低转速。
-
龙伯格观测器基于式(1)和式(2)对电机进行状态重构,电机驱动器的控制量作为观测器的输入,同时,观测器中包含待估计变量转速,于是可以得到估计的电流。由式(2)可以得到反电动势的估计值
${\hat e_\alpha },{\hat e_\beta }$ ,于是利用电流估算误差和反电动势建立自适应律,如式(3)所示。$${{\psi } _s} = \int {{{ { e} }_s} = \int {({{ { u} }_s} - {R_s}{{{ i} }_s})} }{\rm d}t + { { \psi } _{s0}}$$ (2) $$\hat \omega = {K_p}({\hat { e}_\alpha }{\varepsilon _\alpha } - {\hat { e}_\beta }{\varepsilon _\beta }) + {K_I}\int_0^t {({{\hat { e}}_\alpha }{\varepsilon _\alpha } - {{\hat { e}}_\beta }{\varepsilon _\beta }){\rm d}t} $$ (3) 由式(3)得到的转速估计引回状态观测器中,以修正估计电流值和反电动势,从而形成转速闭环估计。
-
卡尔曼滤波器(KF)是一个最优化回归数据处理算法,适用于线性系统。EKF是卡尔曼滤波在非线性系统中的一种推广形式,属于非线性估计算法,对系统和测量噪音抗干扰能力强。由于EKF采用递推算法,其滤波增益在递推过程中自动调节,属于自适应系统,因此也具有一定的参数鲁棒性。
EKF适用于异步[10]、永磁同步和开关磁阻电机[11]。目前对基于扩展卡尔曼滤波的转速估计有一些新的研究方向。文献[10]提出一种双输入卡尔曼滤波器,以克服随着电机工作点而变化的定子电阻和转子电阻对控制造成的影响。文献[11]则对矩阵P、Q和R的初值的最优选取进行研究,以期望提高系统稳定性和收敛速度,并且简化调试过程。
EKF算法复杂,需要矩阵求逆运算,为满足实时控制的要求,对数字信号处理器的速度和精度有一定要求。此外卡尔曼滤波器要用到随机误差的统计模型,设计的参数较多,调试工作量较大。实际应用过程中,存在着滤波发散的问题,即实际估计误差的方差可能趋于无穷大。
-
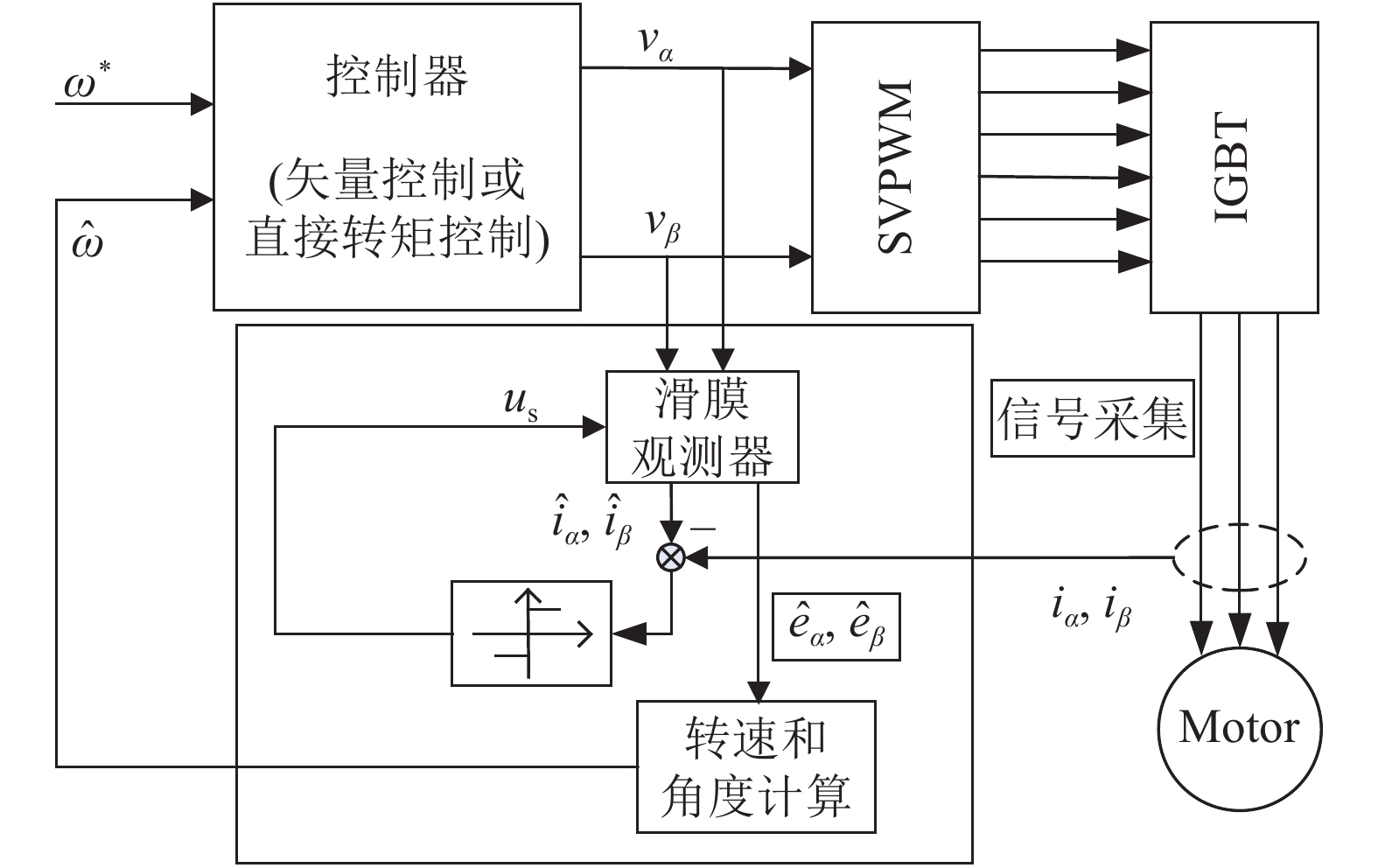
在系统变量从起始点运动到开关面之前,系统的控制结构维持一种形式,当系统变量到达滑模面后,开始自适应地调整律控制,最终使系统状态沿着滑模面一直滑动到平衡点,此时的系统是非连续性的。滑模观测器的输出和电机对应的状态量的误差经过一个开关信号变为滑模量,然后作为控制量反馈到观测器的输入。基于滑模观测器的控制系统框图如图3所示。

图 3 滑模观测器系统框图
采用滑模结构的系统相点达到切换面后,系统运行方式只取决于切换面方程,与系统原来的参数无关。因此滑模结构有比MRAS更好的鲁棒性和抗干扰能力。滑模观测器适用于异步电机、永磁同步电机[6]、直流电机和开关磁阻电机[8]。
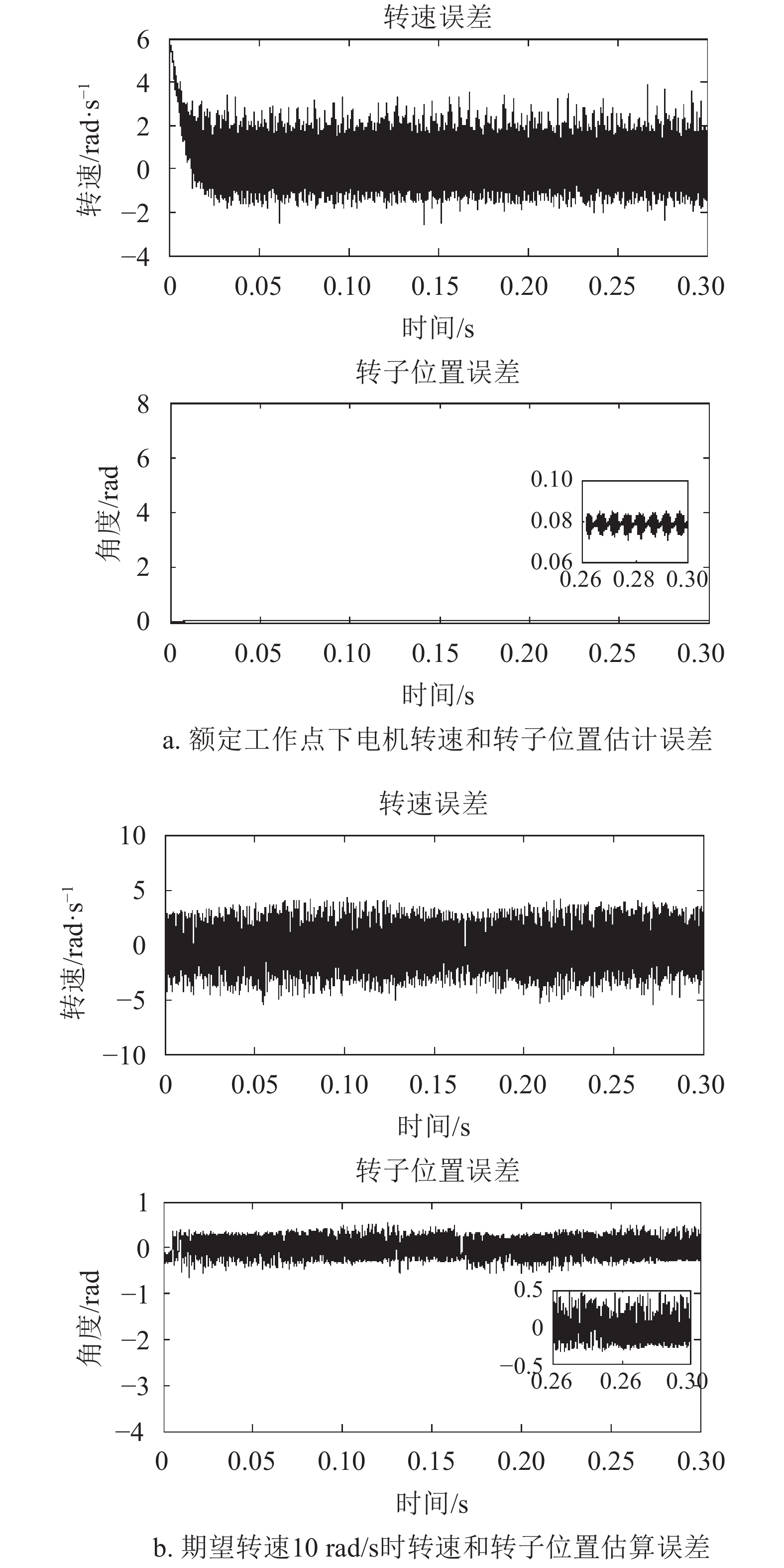
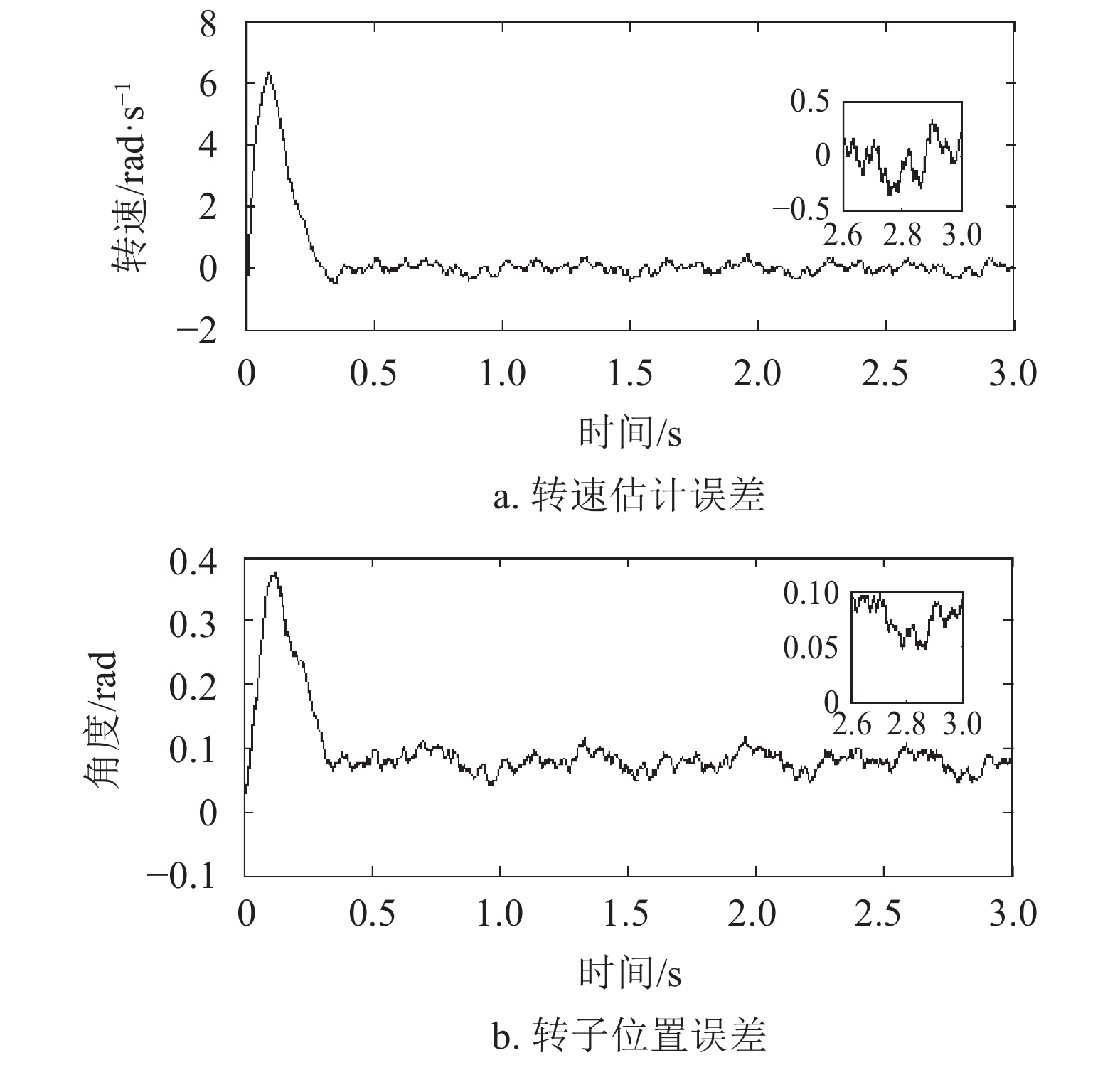
本文在MATLAB/Simulink环境下,对1.1 kW,50 Hz的表面式永磁同步电机基于滑模观测器的无速度传感器控制进行仿真。图4a,图4b分别为额定工作点和10 rad/s时的电机转速估计和转子位置估计误差。稳态下,无论在高速还是低速滑模观测器的观测误差非常小,但是在启动阶段,估算误差大。这是由于系统的初始状态并不在滑模面上,所以系统从初始状态向滑模面转移过程的稳定性不能保证,需要选择合适控制量使系统快速移动至滑模面。与前文提到的MRAS估算结果相比,不论是高速还是低速,SMO的稳态估算效果都要优于MRAS。两种估算算法的稳态误差分析可参见表1。
表 1 两种估算算法的稳态误差分析
算法 转速 10 rad/s 314 rad/s MRAS/% \ 5 SMO/% 50 5 
图 4 不同转速时电机转速和转子位置估算误差
在实际的滑模结构中,抖振是滑模结构的固有问题。开关信号切换动作是造成抖振的根本原因。受系统惯性的影响,使得经开关信号切换后系统需要经过一段时间的动态调整才能到达理想点。因此当系统的运动轨迹达到切换面时,惯性式运动轨迹穿越切换面最终形成抖振。采用积分补偿器可以有效的减弱抖动。文献[6]提出用sigmoid函数代替开关函数以减小抖动,并对电子电阻进行在线辨识以提高估算精度。文献[7]将切换后的增益值由常数改为变量,并由模糊算法决定,以改善抖振现象。
-
前3类估算算法在高速时的估算性能已在实验和实际应用中得到证实,但是在零低速区间受到噪音和参数误差的影响,估算误差大。而在现有的针对零速和低速电机无传感器控制中,基于电机的凸极特性的一类转子位置/速度估算方法最为常见[12-15]。电机凸极效应本质上是一种不对称性,按产生的来源可以分为两种:结构凸极效应和饱和凸极效应。不管是基于哪种凸极效应的估算算法基本原理都是相同的,都是通过测量并分析电机在特定信号激励下的响应信号(如三相电流、电压值或电流微分值)来获取电机的转子信息。
常见的用于电动汽车的异步电机和永磁电机以及开关磁阻电机均适用于高频注入法。文献[15]分别针对永磁电机、直流无刷电机和开关磁阻电机,介绍了一种基于定子铁芯磁场饱和非线性的转子初始位置判断法。按信号激励方式的不同可以分为外部高频信号注入法[12-13]和基于PWM谐波信号激励法[14]。两种方法的区别在于前者注入信号频率和幅值可自由调整,后者则受到PWM开关频率的限制。
-
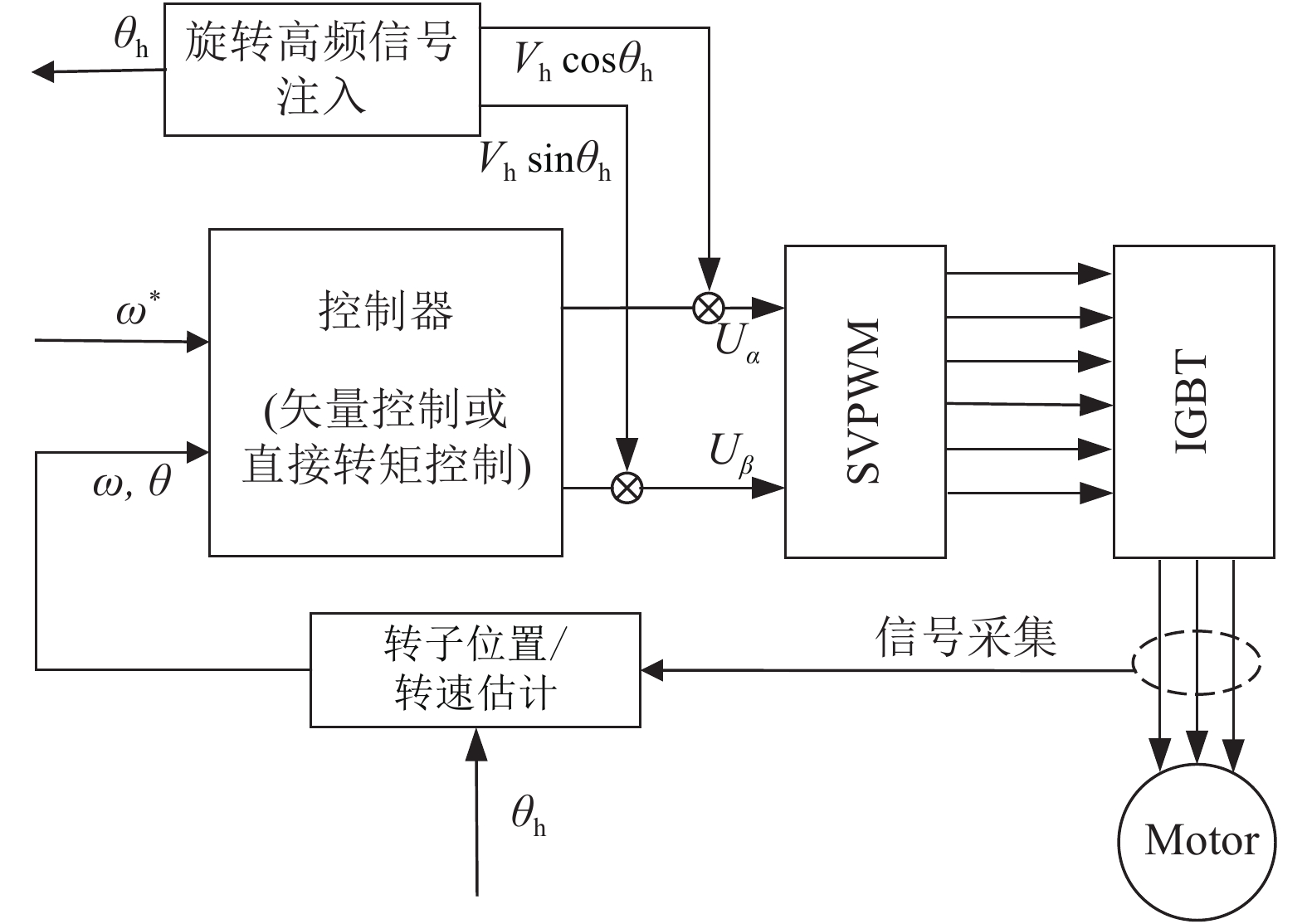
外部高频信号注入法(以下简称高频注入法)是将高频信号注入到控制系统中,注入信号可以是调幅或是旋转的高频信号;可以是电压或电流信号;可以注入在αβ静止坐标系中也可以注入到dq旋转坐标系中。图5是旋转电压矢量信号注入在αβ轴上的高频注入法的系统框图。

图 5 旋转高频信号注入法系统框图
文献[12-13]中介绍的高频注入法根据注入信号类型、测量信号类型、信号处理方式和应用范围的不同而不尽相同,但是其基本原理都是通过检测电机的凸极以获得转子位置信息:在高频信号激励下电机的电流或电压响应里面的高频分量会携带这种凸极效应产生的转子信息。对于这种高频分量采用合适的信号处理方式提取出来就得到了转子位置信号,因此,高频注入法也被称作载波注入法。下面从注入信号类型的角度对每种方法进行分类并加以说明。
注入信号按类型可分为旋转电压矢量注入和调幅电压矢量注入。旋转电压矢量法其注入信号为高速旋转的电压矢量,旋转频率远高于电机基波频率,电机的响应信号里存在两种可以用来提取转子位置信息的高频分量:零序分量和负序分量[12],只需要分析处理任意一种即能得到转子信息。基于零序分量的估算方法既适用于Y型连接的电机,也适用与Δ连接的电机。反序分量通常与正序分量同时出现,因此为获得所需要的信号需要经过滤波器和锁相环提取转子信息[12]。调幅电压矢量注入也是旋转电压矢量,但是其旋转频率与电机电频率相同,通常注入到参考坐标系的横轴或纵轴上,并且电压幅值呈正弦变化,该正弦信号频率为高频,类似于调幅信号。
本文针对1.1 kW,50 Hz内埋式永磁同步电机做了基于旋转电压矢量注入法的无速度传感器仿真。给出了期望电磁转速为10 rad/s下的电机运行仿真结果,见图6。

图 6 10 rad/s时的转速估算误差和位置估算误差
可以看出在电机转速较低时,能比较准确的估算出转子位置和转速。并且,转速越高,动态响应越慢,位置误差越大。这是因为高频注入法的应用要求注入信号频率远大于电机基波频率,并且忽略了反电动势。若电机处于高转速区,此时的反电动势不能被忽略,高频注入法也不再适用。此外,由于注入了外部信号,使得系统的信噪比下降,稳定性降低;控制中需要滤波环节以滤去高频信号的影响,给系统带来了时延和相移。
-
在电动汽车中,AC电机作为一类常见的驱动电机,由车载电池供电。因此,电机驱动需要逆变器实现交直流的转换,通常采用脉冲宽度调制(PWM)[13]控制电压的输出,由逆变器输出一组占空比可变且频率等于开关频率的方波信号。因为逆变器开关频率远高于电机的基波频率,所以这组加载在电机定子上的三相方波信号下的电机响应具有和高频注入法下一样的特性。不同的是,高频注入法的注入信号频率、幅值和方向可控,而基于PWM调制信号的“高频信号”频率由开关频率决定,幅值和方向都不可控。
其中,文献[14]则是基于PWM的高频谐波,并且指出在所有PWM谐波中,二次谐波(即频率是开关频率的两倍)的幅值最大,最适合用来充当高频信号来检测转子位置。文献[14]所描述的方法需要同时检测电流值和电压值。
近几年还有一些其他形式的高频信号用于检测电机凸极[13],其基本原理与常规的高频注入法的原理一致。如注入一个或是多个方波叠加信号代替正弦信号;或是注入频率在几十到几百赫兹之间的低频信号;或是利用零矢量在PWM的每个周期都存在,由PWM波里的零矢量充当高频信号注入[13],而且与文献[14]提到的基于PWM二次谐波的方法不同,文献[13]只需要一个电流微分传感器。
-
基于智能控制算法也是近年来的热点,但尚无成型的理论研究与证明。常见的智能算法[15-16]有模糊算法(FIS)、人工神经网络(ANN)、遗传算法(GA)、模拟退火算法(SAA)和群体算法,它们都属于非线性算法。智能算法在电机转速估计上的应用通常分为两种,一是对现有的经典转速估算算法如高频注入法、MRAS、观测器法等的改进,比如增加参数在线识别,转子位置补偿器等。另一种是直接用智能算法实现转速估计,如模糊控制算法、神经网络算法等。由于这一类算法因不需要控制对象的模型,而依赖于实验数据,不会受到模型精度与参数精度的限制,因而可以适用于全速度范围。智能算法比传统算法更能应对复杂的环境因素。尽管受到计算速度和数据量的限制,但是随着科学技术的进步,计算速度更快,容量更大的芯片的出现,智能算法会受到越来越多的重视。
-
针对电动汽车容错控制,各类算法各有优缺点和适用性。MRAS和观测器多适用于中高转速区,并且已经在理论和实验中证实其算法具有良好的稳定性和控制精度,并且其控制性能在不同程度上与电机参数的准确性相关。基于凸极效应和基于人工智能算法的控制策略不依赖于电机模型,具有较好的鲁棒性和抗噪性。但是高频注入法不适用于中高速区,而人工智能算法发展时间较短,设计与调试较为复杂。
Research on Motor Speed Estimation Method for Electric Vehicles
-
摘要: 该文对几种常见的无速度传感器电机控制方法进行了研究介绍,并按照其参数的鲁棒性和系统抗干扰能力进行分类。完全依赖电机物理参数和电磁方程的转速估计算法参数鲁棒性差,算法抗噪能力弱。部分依赖电机参数和电磁方程的转速估计算法分为4种方法,重点介绍了模型参考自适应方法,并对模型参考自适应和滑膜观测器算法进行了仿真。阐述了独立于电机参数和电磁方程的转速估计算法的两种高频信号算法和一些人工智能算法,总结了各个算法的优缺点和适用性。Abstract: The common speed sensor-less motor control methods are introduced and classified according to parameter robustness and system anti-interference ability. Completely dependent on the physical parameters of the motor and the electromagnetic equation speed estimation algorithms have poor robustness and weak anti-noise ability. Partially dependent on the physical parameters of the motor and the electromagnetic equation speed estimation algorithms are divided into four methods. The model reference adaptation system (MRAS) is introduced, and the model reference adaptive system and sliding mode observer are simulated. Two high-frequency signal algorithms and some artificial intelligence algorithms independent of the physical parameters of the motor and the electromagnetic equation speed estimation algorithms are described. The advantages, disadvantages and applicability of each algorithm are summarized.
-
[1] 龙洪宇, 程小华. 开关磁阻电机无位置传感器控制技术综述[J]. 微电机, 2011, 44(9):71-74. doi: 10.3969/j.issn.1001-6848.2011.09.019 LONG Hong-yu, CHENG Xiao-hua. Overview of mechanical-sensorless control techniques of switched reluctance motor[J]. Micromotors Servo Technique, 2011, 44(9): 71-74. doi: 10.3969/j.issn.1001-6848.2011.09.019 [2] BRIZ F, DEGNER M W. Rotor position estimation[J]. Industrial Electronics Magazine, 2011, 5(2): 24-36. doi: 10.1109/MIE.2011.941118 [3] 张伟伟, 肖飞, 李超然, 等. 基于MRAS的感应电机无传感器控制策略优化[J]. 海军工程大学学报, 2018, 30(3):21-25. ZHANG Wei-wei, XIAO Fei, LI Chao-ran, et al. Optimization of sensorless control strategies for induction motor based on MRAS[J]. Journal of Naval University of Engineering, 2018, 30(3): 21-25. [4] ZORGANI Y A, JOUILI M, KOUBAA Y, et al. A very-low-speed sensorless control induction motor drive with online rotor resistance tuning by using MRAS scheme[J]. Power Electronics and Drives, 2018, 3(1): 171-186. [5] VESELY I, VESELY L, BRADAC Z. MRAS identification of permanent magnet synchronous motor parameters[J]. IFAC-Papers Online, 2018, 51(6): 250-255. doi: 10.1016/j.ifacol.2018.07.162 [6] HONGRYEL K, JUBUM S, JANGMYUNG L. A high-speed sliding-mode observer for the sensorless speed control of a PMSM[J]. Industrial Electronics, 2011, 58(9): 4069-4077. doi: 10.1109/TIE.2010.2098357 [7] CAO Jian-bo, CAO Bing-gang. Fuzzy-logic-based sliding-mode controller design for position-sensorless electric vehicle[J]. Power Electronics, 2009, 24(10): 2368-2378. doi: 10.1109/TPEL.2009.2020429 [8] SHANG Wan-feng, ZHAO Sheng-dun, SHEN Ya-jing, et al. A sliding mode flux-linkage controller with integral compensation for switched reluctance motor[J]. Magnetics, 2009, 45(9): 3322-3328. doi: 10.1109/TMAG.2009.2021264 [9] SAFA O, REMI B, XAVIER S, et al. Visual odometry and place recognition fusion for vehicle position tracking in urban environments[J]. Sensors, 2018, 18(4): 939-957. [10] BARUT M, DEMIR R, ZERDALI E, et al. Real-time implementation of bi input-extended kalman filter-based estimator for speed-sensorless control of induction motors[J]. Industrial Electronics, 2012, 59(11): 4197-4206. doi: 10.1109/TIE.2011.2178209 [11] BENDJEDIA M, AIT-AMIRAT Y, WALTHER B, et al. Position control of a sensorless stepper motor[J]. Power Electronics, 2012, 27(2): 578-587. doi: 10.1109/TPEL.2011.2161774 [12] YANG S C, LORENZ R D. Surface permanent magnet synchronous machine position estimation at low speed using eddy-current-reflected asymmetric resistance[J]. IEEE Transcations on Power Electronics, 2012, 27(5): 2595-2604. doi: 10.1109/TPEL.2011.2171507 [13] LEIDHOLD R. Position sensorless control of PM synchronous motors based on zero-sequence carrier injection[J]. Industrial Electronics, 2011, 58(12): 5371-5379. doi: 10.1109/TIE.2011.2112323 [14] RAUTE R, CARUANA C, STANIES C S, et al. Sensorless control of induction machines at low and zero speed by using PWM harmonics for rotor-bar slotting detection[J]. Industry Applications, 2010, 46(5): 1989-1998. doi: 10.1109/TIA.2010.2057495 [15] LEI S, WU Jian-hua, YANG Shi-you. Initial position estimation in SRM using bootstrap circuit without predefined inductance parameters[J]. Power Electronics, 2011, 26(9): 2449-2456. doi: 10.1109/TPEL.2011.2107334 [16] 樊明龙, 徐秋. 基于遗传算法的双馈电机速度控制系统研究[J]. 微特电机, 2018, 46(12):79-81. doi: 10.3969/j.issn.1004-7018.2018.12.020 FAN Ming-long, XU Qiu. Research on speed control system of doubly-fed induction motor based on genetic algorithm[J]. Small & Special Electrical Machines, 2018, 46(12): 79-81. doi: 10.3969/j.issn.1004-7018.2018.12.020 -

 点击查看大图
点击查看大图

图(6) / 表(1)
计量
- 文章访问数: 5259
- HTML全文浏览量: 1796
- PDF下载量: 34
- 被引次数: 0




