 ISSN
ISSN 




 下载:
下载:











-
时滞递归神经网络(DRNNs)基于在联想记忆、优化控制、图像处理等领域的应用而被广泛研究。在这些应用中大多数都需要DRNNs是稳定的,指数稳定性作为DRNNs的一种重要的动力学性质[1-4],它的特征之一是Lyapunov指数不等于0。然而大多数情况下,DRNNs的最大Lyapunov指数是等于零的,其状态轨迹渐近趋于平衡点,即此时DRNNs是渐近稳定的[5-7]。
多项式稳定性是一种特殊的稳定性,它同指数稳定性一样蕴含着渐近稳定性,但其收敛速度比指数稳定性慢一些。它的特征之一就是其最大的Lyapunov指数等于零。目前,这种系统的多项式稳定性研究较少,只有某些系统在某些特殊情况下才具有多项式稳定性,如波动方程[8-9]和随机微分方程[10-14]。需要说明的是,这里的多项式稳定性不是指对于一个多项式来研究这个多项式的稳定性,而是因为某些系统的解的估计式中含有
${t^{ - \lambda }}\;(t \geqslant {t_0},\;\lambda > 0)$ ,类似于多项式,故称这种稳定性为多项式稳定性,具体见下文的定义。由上所述,某种DRNNs是否具有多项式稳定性?文献[15]回答了这个问题,文中给出了比例时滞递归神经网络(RNNs)多项式稳定性的定义,并研究了几类比例时滞RNNs的多项式稳定性和多项式周期性。文献[16]将比例时滞引入细胞神经网络,提出比例时滞细胞神经网络模型。此后各种比例时滞RNNs基于在二次规划问题和QoS路由决策等方面的潜在应用得到了国内外学者的关注,并取得一些研究成果[17-26],但关于比例时滞RNNs的多项式稳定性的研究还很有限。
除了时滞效应外,脉冲也是影响神经网络动力学性质的重要因素之一。脉冲效应是指在网络运行过程中,系统的状态发生突变,导致网络的行为更加复杂,因此研究脉冲作用下系统的稳定性是非常必要的。目前,已有许多关于脉冲DRNNs的动力学行为的研究成果[24, 27-32]。文献[24]应用Lyapunov稳定性理论结合线性矩阵不等式的方法研究一类比例时滞脉冲RNNs (IRNNs) 的无源性。然而,比例时滞IRNNs的动力学行为的研究还很少。基于此,本文通过构造Lyapunov泛函和LMI的方法对一类比例时滞IRNNs的全局多项式稳定性进行探讨。
-
设
$C([\tilde q{t_0},{t_0}],{\mathbb{R}^n})$ 和$C([\log \tilde q{t_0},\log {t_0}],{\mathbb{R}^n})$ 分别表示具一致收敛拓扑的从$[\tilde q{t_0},{t_0}] \to {\mathbb{R}^n}$ 和$[\log \tilde q{t_0},\log {t_0}] \to {\mathbb{R}^n}$ 的所有连续函数构成的Banach空间,这里${t_0} \geqslant 1$ 。对于${{\varphi}} \in C ([\tilde q{t_0},{t_0}],{\mathbb{R}^n})$ ,$||{{\varphi}} ||_{\tilde q}^2 = {\sup _{\tilde q{t_0} \leqslant s \leqslant {t_0}}}||{{\varphi}} (s)|{|^2}$ ,${{\eta}} \in C ([\log \tilde q{t_0},\log {t_0}],{\mathbb{R}^n})$ ,$||{{\eta}} (s)||_{\tilde \tau }^2 = {\sup _{\log \tilde q{t_0} \leqslant s \leqslant \log {t_0}}}||{{\eta}} (s)|{|^2}$ 。对于${{A}} \in {\mathbb{R}^{n \times n}}$ ,${{A}} > 0$ 和${{A}} < 0$ 分别${{A}}$ 为正定和负定,${\lambda _M}({{A}})$ 和${\lambda _m}({{A}})$ 分别表示${{A}}$ 的最大和最小特征值。对于${{x}} = {({x_1},{x_2}, \cdots {x_n})^{\rm{T}}} \in {\mathbb{R}^n}$ ,$||{{x}}|| = {\left(\displaystyle\sum\limits_{i = 1}^n {x_i^2} \right)^{{1 / 2}}},{\mathbb{N}^ * } = \{ 1,2, \cdots \} $ 。考虑如下脉冲RNNs:
$$\left\{ \begin{aligned} &\dot {{x}}(t) = - {{Cx}}(t) + {{Af}}({{x}}(t)) + {{Bf}}({{x}}(qt)) + {{u}} \\ & \quad \quad \;\;\;t \geqslant {t_0},\;t \ne {t_k} \\ &\Delta {{x}}({t_k}) = {{{E}}_k}({{x}}({t_k}^ - ))\qquad{k \in {\mathbb{N}^ * }} \\ &{{x}}(s) = {{\varphi}} (s)\qquad{s \in [\tilde q{t_0},{t_0}]} \end{aligned} \right.$$ (1) 式中,
${{x}}(t) = {({x_1}(t),{x_2}(t), \cdots ,{x_n}(t))^{\rm{T}}}$ 为神经元的状态向量,$n$ 为神经元的个数;${{C}} = {\rm{diag}} {({c_1},{c_2}, \cdots ,{c_n})^{\rm{T}}}$ ,${c_i} > 0$ ;矩阵${{A}} = {({a_{ij}})_{n \times n}}$ 和${{B}} = {({b_{ij}})_{n \times n}}$ 分别表示反馈和延时反馈矩阵;${{f}}({{x}}(t)) = ({f_1}({x_1}(t)),{f_2}({x_2}(t)),$ $ \cdots ,{f_n}({x_n}(t)){)^{\rm{T}}}$ 表示激活向量函数,${{f}}({{x}}(qt)) = ({f_1}({x_1}({q_1}t)), {f_2}({x_2}({q_2}t)), \cdots , {f_n}({x_n}({q_n}t)))^{\rm{T}}$ ;${q_i}t = t - (1 - {q_i})t$ ,这里${q_i} \in (0,1)$ ,$i = 1,2, \cdots ,n$ 。当$t \to + \infty $ 时,$(1 - {q_i})t \to + \infty $ 是无界时滞函数,$\tilde q = \mathop {\min }\limits_{1 \leqslant i \leqslant n} \{ {q_i}\} $ ;${{u}} = {({u_1},{u_2}, \cdots ,{u_n})^{\rm{T}}}$ 是外部输入常向量;${{\varphi}} (s) \in C([\tilde q{t_0},{t_0}],{\mathbb{R}^n})$ 表示${{x}}(s)$ $(s \in [\tilde q{t_0},{t_0}])$ 的初值函数;时间序列${\rm{\{ }}{t_k}{\rm{\} }}$ 满足${t_0} < {t_1}$ $ < \cdots < {t_k} < {t_{k + 1}} < \cdots $ ,且${\lim _{k \to + \infty }}{t_k} = + \infty $ ;$\Delta {{x}}({t_k}) = (\Delta {x_1}({t_k}), \Delta {x_2}({t_k}), \cdots , \Delta {x_n}({t_k}))^{\rm{T}}$ ,$\Delta {x_i}({t_k}) = {x_i}({t_k}^ + ) - {x_i}({t_k}^ - )$ ,${x_i}({t_k}^ + ) = {x_i}({t_k})$ ,且${x_i}({t_k}^ - ) = {\lim _{t \to {t_k}^ - }}{x_i}(t)$ ;${{{E}}_{k}}( \cdot )$ 表示状态变量在时刻${t_k}$ 处的增量变化。本文对激活函数作如下假设:
(H) 假设
${f_i}( \cdot )\;(i = 1,2, \cdots ,n)$ 满足:$$0 \leqslant \frac{{{f_i}(u) - {f_i}(v)}}{{u - v}} \leqslant {l_i}\begin{array}{*{20}{c}} {}&{u,v \in \mathbb{R}} \end{array}\;$$ 记
${{L}} = {\rm{diag}}({l_1},{l_2}, \cdots ,{l_n})$ 。令
${{z}}(t) = {{x}}({{\rm{e}}^t})$ ,则式(1)等价地变换为:$$\left\{ \begin{split} & \dot {{z}}(t) = {{\rm{e}}^t}[ - {{Cz}}(t) + {{Af}}({{z}}(t)) + {{Bf}}({{z}}(t - \tau )) + {{u}}] \\ & \quad \quad \;\;\;t \geqslant \log {t_0},\;t \ne {t_k} \\ & \Delta {{z}}({t_k}) = {{{E}}_k}({{z}}({t_k}^ - ))\qquad \;k \in {\mathbb{N}^ * } \\ & {{z}}(s) = {{\psi}} (s)\qquad s \in [\log \tilde q{t_0},\log {t_0}] \end{split} \right.$$ (2) 式中,
${{z}}(t) = {({z_1}(t),{z_2}(t), \cdots ,{z_n}(t))^{\rm{T}}}$ ;${{f}}({{z}}(t)) = ({f_1}({z_1}(t)),$ ${f_2}({z_2}(t)), \cdots ,{f_n}({z_n}(t)){)^{\rm{T}}}$ ;${{f}}({{z}}(t - \tau )) = ({f_1}({z_1}(t - {\tau _1})),$ ${f_2}({z_2} (t - {\tau _2})), \cdots ,{f_n}({z_n}(t - {\tau _n})){)^{\rm{T}}}$ ,${\tau _i} = - \log {q_i} \geqslant 0$ ,$\tilde \tau = \mathop {\max }\limits_{1 \leqslant i \leqslant n} \{ {\tau _i}\} = - \log \tilde q$ ;${{\psi}} (s) = {{\varphi}} ({{\rm{e}}^s}) \in C([\log \tilde q{t_0},\log {t_0}],{\mathbb{R}^n})$ 。由假设
$(H)$ 可知,式(1)和式(2)的平衡点必存在。设${{{x}}^ * } = {(x_1^ * ,x_2^ * , \cdots ,x_n^ * )^{\rm{T}}}$ 和${{{z}}^ * } = {(z_1^ * ,z_2^ * , \cdots ,z_n^ * )^{\rm{T}}}$ 为式(1)和式(2)的平衡点,由平衡点的定义,可算得${{{x}}^ * } = {{{z}}^ * }$ 。因此,可通过探讨式(2)的平衡点${{{z}}^ * }$ 的稳定性来间接讨论式(1)的平衡点${{{x}}^ * }$ 的稳定性情况。令
${{y}}(t) = {{z}}(t) - {{{z}}^ * }\;$ ,${y_i}(t) = {z_i}(t) - z_i^ * ,\;i = 1,2, \cdots ,n$ ,则式(2)改写为:$$\left\{\; \begin{split} &\dot {{y}}(t) = {{\rm{e}}^t}[ - {{Cy}}(t) + {{Ag}}({{y}}(t))+ \\ &{{Bg}}({{y}}(t - \tau ))]\quad \;\;\; t \geqslant \log {t_0},\;t \ne {t_k} \\ &\Delta {{y}}({t_k}) = {{{E}}_k}({{y}}({t_k}^ - ))\qquad\;k \in {\mathbb{N}^ * } \\ &{{y}}(s) = {{\eta}} (s)\qquad\;s \in [\log \tilde q{t_0},\log {t_0}] \end{split} \right.$$ (3) 式中,
${{g}}({{y}}(t - \tau )) = ({g_1}({y_1}(t - {\tau _1})),{g_2}({y_2}(t - {\tau _2})), \cdots ,$ ${g_n}({y_n}(t - {\tau _n})){)^{\rm{T}}}$ ,${g_i}({y_i}(t)) = {f_i}({y_i}(t) + z_i^ * ) - {f_i}(z_i^ * )$ ,且${g_i}(0) = 0$ ;${{\eta}} (s) = {{\psi}} (s) - {{{z}}^ * }$ 。由(H)和
${g_i}({y_i}(t)) = {f_i}({y_i}(t) + z_i^ * ) - {f_i}( {z_i^ * } )$ ,可得:$$0 \leqslant \frac{{{g_i}({y_i}(t))}}{{{y_i}(t)}} \leqslant {l_i}$$ (4) 由积分中值定理,可得:
$$ 0 \leqslant \int_0^{{y_i}(t)} {{g_i}(s)} {\rm{d}}s \leqslant {g_i}({y_i}(t)){y_i}(t) $$ (5) 由式(4)和式(5),可得:
$${l_i}{y_i}(t) \geqslant {g_i}({y_i}(t)),\;\;{g_i}({y_i}(t)){y_i}(t) \geqslant 0$$ 从而得:
$${l_i}{g_i}({y_i}(t)){y_i}(t) \geqslant g_i^2({y_i}(t))\quad \forall {y_i}(t) \in \mathbb{R},\;i = 1,2, \cdots ,n$$ (6) 同时,由式(6)可得:
$$\begin{split} & {{{g}}^{\rm{T}}}({{y}}(t)){{DCy}}(t) = \sum\limits_{i = 1}^n {{g_i}({y_i}(t)){d_i}{c_i}{y_i}(t)} \geqslant \\ & \sum\limits_{i = 1}^n {\frac{{{d_i}{c_i}}}{{{l_i}}}{g_i}^2({y_i}(t))} = {{{g}}^{\rm{T}}}({{y}}(t)){{{DCL}}^{ - 1}}{{g}}({{y}}(t))\; \end{split} $$ (7) 定义1 称系统(1)的平衡点
${{{x}}^ * }$ 是全局多项式稳定的(GPS)。若存在$\lambda > 0$ 和$\,\beta \geqslant 1$ ,使得:$$ ||{{x}}(t) - {{{x}}^ * }|{|^2} \leqslant \beta ||{{\varphi}} (s) - {{{x}}^ * }||_{\tilde q}^2{\left( {\frac{t}{{{t_0}}}} \right)^{ - \lambda }}\begin{array}{*{20}{c}} {}&{t \geqslant {t_0}} \end{array} $$ 式中,
$ ||{{\varphi}} (s) - {{{x}}^ * }||_{\tilde q}^2 = \mathop {\sup }\limits_{\tilde q{t_0} \leqslant s \leqslant {t_0}} ||{{\varphi}} (s) - {{{x}}^ * }|{|^2}$ 。定义2 称系统(2)的平衡点
${{{z}}^ * }$ 是全局指数稳定的(GES)。若存在$\lambda > 0$ 和$\beta \geqslant 1$ ,使得:$$||{{z}}(t) - {{{z}}^ * }|{|^2} \leqslant \beta ||{{\psi}} (s) - {{{z}}^ * }||_{\tilde \tau }^2{{\rm{e}}^{ - \lambda (t - \log {t_0})}}\begin{array}{*{20}{c}} {}&{t \geqslant {t_0}} \end{array}$$ 式中,
$ ||{{\psi}} (s) - {{{z}}^ * }||_{\tilde \tau }^2 = \mathop {\sup }\limits_{\log \tilde q{t_0} \leqslant s \leqslant \log {t_0}} ||{{\psi}} (s) - {{{z}}^ * }|{|^2}$ 。 -
定理1 假设(H)成立,
$ {x_i}({t_k})\! =\! {\lambda _{ik}}{x_i}({t_k}^ -\! )$ ,$ \lambda _{ik}^2 \!\leqslant\!\! 1$ 。若存在矩阵$ {{P}} = {({p_{ij}})_{n \times n}} > 0$ ,$ {{M}} = {\rm{diag}}({m_1},{m_2}, \cdots ,{m_n}) > 0$ ,$ {{D}} = {\rm{diag}}({d_1},{d_2}, \cdots ,{d_n}) > 0$ ,常数$ \sigma $ 满足$ 0 < (\sigma - 1)$ $ < 2\min \{ {c_i}\} $ ,使得:$$ \begin{split} & \qquad\qquad\qquad\qquad\qquad\qquad{{\varXi }} = \\ & \left(\!\!\!\! \begin{array}{l} (\sigma - 1){{P}} - {{{C}}^{\rm{T}}}{{P}} - {{{P}}^{\rm{T}}}{{C}} \;\;{{{P}}^{\rm{T}}}{{A}} + \dfrac{1}{2}(\sigma - 1){{D}}\quad {{{B}}^{\rm{T}}}{{P}}\\ {{{A}}^{\rm{T}}}{{P}} + \dfrac{1}{2}(\sigma - 1){{D}}\quad \quad \;- {{DC}}{{{L}}^{ - 1}} \!\!+\!\! {{M}} \!\!+\!\! {{DA}} \;\; \dfrac{1}{2}{{{D}}^{\rm{T}}}{{B}}\\ \quad {{{P}}^{\rm{T}}}{{B}}\quad \quad \quad \quad \quad \quad\;\; \dfrac{1}{2}{{{B}}^{\rm{T}}}{{D}}\quad \quad \quad \quad \quad\; - {{\tilde q}^{ - \sigma }}{{M}} \end{array}\!\!\!\! \right)< 0 \end{split} $$ 则系统(1)的平衡点
${{{x}}^ * }$ 是GPS。证明:考虑如下Lyapunov泛函:
$$\begin{split} & V(t) = {{\rm{e}}^{(\sigma - 1)t}}{{{y}}^{\rm{T}}}(t){{Py}}(t) + \sum\limits_{i = 1}^n {{{\rm{e}}^{(\sigma - 1)t}}{d_i}} \int_0^{{y_i}(t)} {{g_i}(s)} {\rm{d}}s + \\ &\qquad \;\; \sum\limits_{i = 1}^n {\int_{t - {\tau _i}}^t {{{\rm{e}}^{\sigma \theta }}{m_i}g_i^2({y_i}(\theta ))} {\rm{d}}\theta } \end{split} $$ (8) 式中,
$ {{P}} = {({p_{ij}})_{n \times n}} > 0,\;\sigma > 1,\;{d_i} > 0,\;{m_i} > 0,\;i = 1,2, \cdots ,n$ 。当
$t \ne {t_k}$ 时,将式(8)沿系统(3)对$t$ 进行求导,得:$$\begin{split} &\quad\dot V(t) = {{\rm{e}}^{(\sigma - 1)t}}[(\sigma - 1){{{y}}^{\rm{T}}}(t){{Py}}(t) + 2{{{y}}^{\rm{T}}}(t){{P}}\dot {{y}}(t) + \\ &\sum\limits_{i = 1}^n {(\sigma - 1){d_i}\int_0^{{y_i}(t)} {{g_i}(s)} } {\rm{d}}s]{\rm{ + }}{{\rm{e}}^{(\sigma - 1)t}}\sum\limits_{i = 1}^n {{g_i}({y_i}(t))} {d_i}{{\dot y}_i}(t) + \\ &\;\;\;\sum\limits_{i = 1}^n {[{{\rm{e}}^{\sigma t}}{m_i}{g_i}^2({y_i}(t))} - {{\rm{e}}^{\sigma (t - {\tau _i})}}{m_i}{g_i}^2({y_i}(t - {\tau _i}))] \leqslant \end{split}$$ $$\begin{split} &\qquad\;{{\rm{e}}^{(\sigma - 1)t}}[(\sigma - 1){{{y}}^{\rm{T}}}(t){{Py}}(t) + 2{{{y}}^{\rm{T}}}(t){{P}}\dot {{y}}(t) + \\ &\qquad\qquad\sum\limits_{i = 1}^n {(\sigma - 1){g_i}({y_i}(t)){d_i}{y_i}(t)} ] + \\ &\;\;{{\rm{e}}^{(\sigma - 1)t}}\sum\limits_{i = 1}^n {{g_i}({y_i}(t))} {d_i}{{\dot y}_i}(t) + {{\rm{e}}^{\sigma t}}{{{g}}^{\rm{T}}}({{y}}(t)){{Mg}}({{y}}(t)) - \\ &\qquad\;\;{{\rm{e}}^{\sigma t}}{{{g}}^{\rm{T}}}({{y}}(t - \tau )){{\rm{e}}^{ - \sigma \bar \tau }}{{Mg}}({{y}}(t - \tau )) = \\ &{{\rm{e}}^{(\sigma - 1)t}}{{{y}}^{\rm{T}}}(t)(\sigma - 1){{Py}}(t) + 2{{\rm{e}}^{\sigma t}}{{{y}}^{\rm{T}}}(t){{P}}( - {{Cy}}(t) + {{Ag}}({{y}}(t)) + \\ &\;\;\;\;{{Bg}}({{y}}(t - \tau )))\;\; + (\sigma - 1){{\rm{e}}^{(\sigma - 1)t}}{{{g}}^{\rm{T}}}({{y}}(t)){{Dy}}(t) + \\ &\;\;\;{{\rm{e}}^{\sigma t}}{{{g}}^{\rm{T}}}({{y}}(t)){{D}}( - {{Cy}}(t) + {{Ag}}({{y}}(t)) + {{Bg}}({{y}}(t - \tau ))) + \\ &{{\rm{e}}^{\sigma t}}{{{g}}^{\rm{T}}}({{y}}(t)){{Mg}}({{y}}(t)) - {{\rm{e}}^{\sigma t}}{{{g}}^{\rm{T}}}({{y}}(t - \tau )){{\rm{e}}^{ - \sigma \bar \tau }}{{Mg}}({{y}}(t - \tau )) \leqslant \\ &\;\;\;\;\;{{\rm{e}}^{\sigma t}}\left\{ {{{{y}}^{\rm{T}}}(t)[(\sigma - 1){{P}} - {{{P}}^{\rm{T}}}{{C}} - {{{C}}^{\rm{T}}}{{P}}]{{y}}(t)} \right. + \\ & \qquad2{{{y}}^{\rm{T}}}(t){{PAg}}({{y}}(t)) + 2{{{y}}^{\rm{T}}}(t){{PBg}}({{y}}(t - \tau )) + \\ &\qquad {{{g}}^{\rm{T}}}({{y}}(t))(\sigma - 1){{Dy}}(t) - {{{g}}^{\rm{T}}}({{y}}(t)){{DCy}}(t) + \\ &\qquad {{{g}}^{\rm{T}}}({{y}}(t)){{DA}}{{{g}}^{\rm{T}}}({{y}}(t)) + {{{g}}^{\rm{T}}}({{y}}(t)){{DBg}}({{y}}(t - \tau )) + \quad \\ &\;\;\;\left. {{{{g}}^{\rm{T}}}({{y}}(t)){{Mg}}({{y}}(t)) - {{{g}}^{\rm{T}}}({{y}}(t - \tau )){{\rm{e}}^{ - \sigma \bar \tau }}{{Mg}}({{y}}(t - \tau ))} \right\} \end{split}$$ (9) 由式(9)和式(7),得:
$$ \begin{split} &\;\;\;\;\;\; \dot V(t) \leqslant {{\rm{e}}^{\sigma t}}\left\{ {{{{y}}^{\rm{T}}}(t)[(\sigma - 1){{P}} - {{{P}}^{\rm{T}}}{{C}} - {{{C}}^{\rm{T}}}{{P}}]{{y}}(t)} \right. + \\ & \;\;\;\;\quad2{{{y}}^{\rm{T}}}(t){{PAg}}({{y}}(t)) + 2{{{y}}^{\rm{T}}}(t){{PBg}}({{y}}(t - \tau )) + \\ & \;\;\;\;{{{g}}^{\rm{T}}}({{y}}(t))(\sigma - 1){{Dy}}(t) - {{{g}}^{\rm{T}}}({{y}}(t)){{DC}}{{{L}}^{ - 1}}{{g}}({{y}}(t)) + \\ & \;\;\;\;\;\;{{{g}}^{\rm{T}}}({{y}}(t)){{DAg}}({{y}}(t)) + {{{g}}^{\rm{T}}}({{y}}(t)){{DBg}}({{y}}(t - \tau ))) + \\ & \;\;{{{g}}^{\rm{T}}}({{y}}(t)){{Mg}}({{y}}(t)) - \left. {{{{g}}^{\rm{T}}}({{y}}(t - \tau ))({{\rm{e}}^{ - \sigma \tilde \tau }}{{M}}){{g}}({{y}}(t - \tau ))} \right\} = \\ &\;\;\;\;\;\;\; {{\rm{e}}^{\sigma t}}\left\{ {{{{y}}^{\rm{T}}}(t)[(\sigma - 1){{P}} - {{{P}}^{\rm{T}}}{{C}} - {{{C}}^{\rm{T}}}{{P}}]{{y}}(t)} \right. + \\ & \;\;\;\;\;\;2{{{y}}^{\rm{T}}}(t){{PAg}}({{y}}(t)) + 2{{{y}}^{\rm{T}}}(t){{PBg}}({{y}}(t - \tau )) + \\ & \;\;\;\;{{{g}}^{\rm{T}}}({{y}}(t))(\sigma - 1){{Dy}}(t) - {{{g}}^{\rm{T}}}({{y}}(t)){{DC}}{{{L}}^{ - 1}}{{g}}({{y}}(t)) + \\ &\;\; \;\;\;{{{g}}^{\rm{T}}}({{y}}(t)){{DAg}}({{y}}(t)) + {{{g}}^{\rm{T}}}({{y}}(t)){{DBg}}({{y}}(t - \tau ))) + \\ & \;\;\;\;{{{g}}^{\rm{T}}}({{y}}(t)){{Mg}}({{y}}(t)) - \left. {{{{g}}^{\rm{T}}}({{y}}(t - \tau ))({{\rm{e}}^{ - \sigma \tilde \tau }}{{M}}){{g}}({{y}}(t - \tau ))} \right\} = \\ &\qquad\qquad\qquad\qquad\;\;\; {{\rm{e}}^{\sigma t}}{{{\xi }}^{\rm{T}}}(t){{\varXi \xi }}(t) \end{split} $$ 式中,
${{\xi}=\left(y^{\rm{T}}(t)\;g^{\rm{T}}(y(t))\;g^{\rm{T }}(y(t-\tau))\right)^{\rm{T}}}$ 。由已知$\varXi < 0$ ,可得:$$\dot V(t) \leqslant 0\quad\;t \ne t{}_k$$ (10) 另一方面,当
$t \ne {t_k}$ 时,由式(8),得:$$ \begin{gathered} V({t_k}) = \sum\limits_{i = 1}^n {\sum\limits_{j = 1}^n {} {{\rm{e}}^{(\sigma - 1){t_k}}}} {y_i}({t_k}){p_{ij}}{y_j}({t_k})\; + \\ \;\sum\limits_{i = 1}^n {{{\rm{e}}^{(\sigma - 1){t_k}}}{d_i}} \int_0^{{y_i}({t_k})} {{g_i}(s)} {\rm{d}}s + \sum\limits_{i = 1}^n {} \int_{{t_k} - {\tau _i}}^{{t_k}} {{{\rm{e}}^{\sigma \theta }}{m_i}g_i^2({y_i}(\theta ))} {\rm{d}}\theta = \\ \sum\limits_{i = 1}^n {\sum\limits_{j = 1}^n {} {{\rm{e}}^{(\sigma - 1){t_k}^ - }}} \lambda _{ik}^2{y_i}(t_k^ - ){p_{ij}}{y_j}({t_k}^ - ) + \\ \;\;\sum\limits_{i = 1}^n {{{\rm{e}}^{(\sigma - 1){t_k}^ - }}{d_i}} \int_0^{{\lambda _{ik}}{y_i}({t_k}^ - )} {{g_i}(s)} {\rm{d}}s + \end{gathered} $$ $$ \sum\limits_{i = 1}^n {} \int_{{t_k}^ - - {\tau _i}}^{{t_k}^ - } {{{\rm{e}}^{\sigma \theta }}{m_i}g_i^2({y_i}(\theta ))} {\rm{d}}\theta $$ 由于
$\lambda _{ik}^2 \leqslant 1$ ,则$\displaystyle\int_0^{{\lambda _{ik}}{y_i}({t_k}^ - )} {{g_i}(s)} {\rm{d}}s \leqslant \displaystyle\int_0^{{y_i}({t_k}^ - )} {{g_i}(s)} {\rm{d}}s$ 。于是:$$ \begin{split} &\qquad\;\; V({t_k}) \leqslant V({t_k}^ - ) = {{\rm{e}}^{(\sigma - 1){t_k}^ - }}{{{y}}^{\rm{T}}}({t_k}^ - ){{Py}}({t_k}^ - ) + \\ & \sum\limits_{i = 1}^n {{{\rm{e}}^{(\sigma - 1){t_k}^ - }}{d_i}} \int_0^{{y_i}({t_k}^ - )} {{g_i}(s)} {\rm{d}}s + \sum\limits_{i = 1}^n {\int_{{t_k}^ - - {\tau _i}}^{{t_k}^ - } {{{\rm{e}}^{\sigma \theta }}{m_i}g_i^2({y_i}(\theta ))} {\rm{d}}\theta } \end{split} $$ (11) 由(10)和(11),当
$t \geqslant \log {t_0}$ 时,得:$$V(t) \leqslant V(\log {t_0}),\;t \in ({t_{k - 1}},{t_k}],\;k \in {\mathbb{N}^ * }$$ 当且仅当
${{y}}(t) \!=\! {{g}}({{y}}(t)) \!=\! {{g}}({{y}}(t\! -\! \tau ))$ 时,$\dot V(t) \!=\! 0$ 。且:$$ \begin{gathered} V(\log {t_0}) = {{\rm{e}}^{(\sigma - 1)\log {t_0}}}{{{y}}^{\rm{T}}}(\log {t_0}){{Py}}(\log {t_0}) + \\ \sum\limits_{i = 1}^n {{{\rm{e}}^{(\sigma - 1)\log {t_0}}}{d_i}\int_0^{{y_i}(\log {t_0})} {{g_i}(s)} {\rm{d}}s} + \\ \sum\limits_{i = 1}^n {\int_{\log {q_i}{t_0}}^{\log {t_0}} {{{\rm{e}}^{\sigma \theta }}{m_i}g_i^2({y_i}(\theta ))} {\rm{d}}\theta } \leqslant \\ {{\rm{e}}^{(\sigma - 1)\log {t_0}}}{y^{\rm{T}}}(\log {t_0}){{Py}}(\log {t_0}) + \\ {{\rm{e}}^{(\sigma - 1)\log {t_0}}}\sum\limits_{i = 1}^n {{d_{^i}}{g_i}({y_i}(\log {t_0})){y_i}(\log {t_0})} + \\ \sum\limits_{i = 1}^n {\int_{\log {q_i}{t_0}}^{\log {t_0}} {{{\rm{e}}^{\sigma \theta }}{m_i}l_i^2y_i^2(\theta )} {\rm{d}}\theta } \leqslant \\ {{\rm{e}}^{(\sigma - 1)\log {t_0}}}\left( {{{{y}}^{\rm{T}}}(\log {t_0}){{Py}}(\log {t_0}) + {{{y}}^{\rm{T}}}(\log {t_0}){{LDy}}(\log {t_0})} \right) + \\ \mathop {\max }\limits_{1 \leqslant i \leqslant n} \left\{ {{m_i}l_i^2t_0^\sigma {\sigma ^{ - 1}}} \right\}\sum\limits_{i = 1}^n {\mathop {\sup }\limits_{\log {q_i}{t_0} \leqslant \theta \leqslant \log {t_0}} y_i^2(\theta )} \leqslant \\ {{\rm{e}}^{(\sigma - 1)\log {t_0}}}{\lambda _M}({{P}} + {{LD}})||{{y}}(\log {t_0})|{|^2} + \\ \mathop {\max }\limits_{1 \leqslant i \leqslant n} \left\{ {{m_i}l_i^2t_0^\sigma {\sigma ^{ - 1}}} \right\}\sum\limits_{i = 1}^n {\mathop {\sup }\limits_{\log {q_i}{t_0} \leqslant \theta \leqslant \log {t_0}} y_i^2(\theta )} \leqslant \\ {{\rm{e}}^{(\sigma - 1)\log {t_0}}}{\lambda _M}({{P}} + {{LD}})||{{y}}(\log {t_0})|{|^2} + \\ \mathop {\max }\limits_{1 \leqslant i \leqslant n} \left\{ {{m_i}l_i^2t_0^\sigma {\sigma ^{ - 1}}} \right\}\mathop {\sup }\limits_{\log \tilde q{t_0} \leqslant \theta \leqslant \log {t_0}} \sum\limits_{i = 1}^n {y_i^2(\theta )} \leqslant \\ {{\rm{e}}^{(\sigma - 1)\log {t_0}}}\bigg\{ {{\lambda _M}({{P}} + {{LD}})} + \\ {\mathop {\max }\limits_{1 \leqslant i \leqslant n} [{m_i}l_i^2t_0^\sigma {\sigma ^{ - 1}}]} \bigg\}\mathop {\sup }\limits_{\log \tilde q{t_0} \leqslant \theta \leqslant \log {t_0}} ||{{y}}(\theta )|{|^2} \leqslant \\ {{\rm{e}}^{(\sigma - 1)\log {t_0}}}\bigg\{ {{\lambda _M}({{P}} + {{LD}})} + \\ {\mathop {\max }\limits_{1 \leqslant i \leqslant n} [{m_i}l_i^2t_0^\sigma {\sigma ^{ - 1}}]} \bigg\}\mathop {\sup }\limits_{\log \tilde q{t_0} \leqslant \theta \leqslant \log {t_0}} ||{{\eta}} (\theta )|{|^2} \end{gathered} $$ 又因为:
$${{\rm{e}}^{(\sigma - 1)t}}{{{y}}^{\rm{T}}}(t){{Py}}(t) \leqslant V(t) \leqslant V(\log {t_0})$$ 于是,得:
$$\begin{gathered} {\lambda _m}{\rm{(}}{{P}}{\rm{)}}{{\rm{e}}^{(\sigma - 1)t}}||{{y}}(t)|{|^2} \leqslant {{\rm{e}}^{(\sigma - 1)t}}{{{y}}^{\rm{T}}}(t){{Py}}(t) \leqslant \\ {{\rm{e}}^{(\sigma - 1)\log {t_0}}}\bigg\{ {{\lambda _M}({{P}} + {{LD}})} + \\ \; {\mathop {\max }\limits_{1 \leqslant i \leqslant n} [{m_i}l_i^2t_0^\sigma {\sigma ^{ - 1}}]} \bigg\}\mathop {\sup }\limits_{\log \tilde q{t_0} \leqslant \theta \leqslant \log {t_0}} ||{{\eta}} (\theta )|{|^2} \end{gathered} $$ 所以:
$$||{{y}}(t)|{|^2} \leqslant \beta \mathop {\sup }\limits_{\log \tilde q{t_0} \leqslant \theta \leqslant \log {t_0}} ||{{\eta}} (\theta )||_{}^2{{\rm{e}}^{ - \lambda (t - \log {t_0})}}\;$$ (12) 式中,
$\lambda = \sigma - 1 > 0$ ;$\,\beta = \dfrac{1}{{{\lambda _m}({{P}})}}\{ {\lambda _M}({{P}} + {{LD}}) + $ $ \mathop {\max }\limits_{1 \leqslant i \leqslant n} \{ {m_i}l_i^2t_0^\sigma {\sigma ^{ - 1}}\} \geqslant 1$ 。从而,得:
$$||{{z}}(t) - {{{z}}^ * }|{|^2} \leqslant \beta \mathop {\sup }\limits_{\log \tilde q{t_0} \leqslant \theta \leqslant \log {t_0}} ||{{\psi}} (\theta ) - {{{z}}^ * }||_{}^2{{\rm{e}}^{ - \lambda (t - \log {t_0})}}\;$$ (13) 再将
${{{x}}^ * } = {{{z}}^ * }$ 和${{z}}(t) = {{x}}({{\rm{e}}^t})$ 代入式(13),得:$$||{{x}}({{\rm{e}}^t}) - {{{x}}^ * }|{|^2} \leqslant \beta \mathop {\sup }\limits_{\log \tilde q{t_0} \leqslant \theta \leqslant \log {t_0}} ||{{\varphi}} ({{\rm{e}}^\theta }) - {{{x}}^ * }||_{}^2{{\rm{e}}^{ - \lambda (t - \log {t_0})}}\;$$ (14) 在式(14)中,令
${{\rm{e}}^t} = \gamma $ ,则$t = \log \gamma \geqslant 0,\;t \geqslant {t_0}$ 。再令${{\rm{e}}^\theta } = \xi $ ,则$ \theta \in \left[ {\log \;\tilde q{t_0},\log {t_0}} \right]$ ,$ \xi \in \left[ {q{t_0},\;{t_0}} \right]$ ,有:$$||{{x}}(\gamma ) - {{{x}}^ * }|{|^2} \leqslant \beta \mathop {\sup }\limits_{\tilde q{t_0} \leqslant \xi \leqslant {t_0}} ||{{\varphi}} (\xi ) - {{{x}}^ * }|{|^2}{{\rm{e}}^{ - \lambda (\log \gamma - \log {t_0})}}$$ 再取
$\gamma = t$ ,有:$$||{{x}}(t) - {{{x}}^ * }|{|^2} \leqslant \beta \mathop {\sup }\limits_{\tilde q{t_0} \leqslant \xi \leqslant {t_0}} ||{{\varphi}} (\xi ) - {{{x}}^ * }|{|^2}{\left( {\frac{t}{{{t_0}}}} \right)^{ - \lambda }}\quad t \geqslant {t_0}$$ 根据定义1,可知系统(1)的平衡点
${x^ * }$ 是GPS。由式(13)和定义2,可得下面结果。
定理2 假设(H)成立,
${x_i}({t_k}) \!=\! {\lambda _{ik}}{x_i}({t_k}^ - \!)$ ,$\lambda _{ik}^2 \!\leqslant\!\! 1$ 。若存在矩阵${{P}} = {({p_{ij}})_{n \times n}} > 0$ ,${{M}} = {\rm{diag}}({m_1},{m_2}, \cdots ,{m_n}) > 0$ ,${{D}} = {\rm{diag}}({d_1},{d_2}, \cdots ,{d_n}) > 0$ ,和常数$\sigma $ 满足$0 < (\sigma - 1)$ $ < 2\min \{ {c_i}\} $ ,使得:$$ \begin{split} &\qquad\qquad\qquad\qquad\qquad\qquad {{\varXi }} =\\ &\left( \begin{array}{l} (\sigma - 1){{P}}\!\! -\!\! {{{C}}^{\rm{T}}}{{P}} \!\!-\!\! {{{P}}^{\rm{T}}}{{C}}\;\;{{{P}}^{\rm{T}}}{{A}} + \dfrac{1}{2}(\sigma - 1){{D}}\;\;\; {{{B}}^{\rm{T}}}{{P}}\\ {{{A}}^{\rm{T}}}{{P}} + \dfrac{1}{2}(\sigma - 1){{D}}\quad \; - {{DC}}{{{L}}^{ - 1}} \!\!+ \!\!{{M}}\!\! +\!\! {{DA}}\;\; \dfrac{1}{2}{{{D}}^{\rm{T}}}{{B}}\\ \quad \quad{{{P}}^{\rm{T}}}{{B}}\quad \quad \quad \quad \;\; \dfrac{1}{2}{{{B}}^{\rm{T}}}{{D}} \quad \quad \quad \quad \quad \; - \;{{\rm{e}}^{\sigma \tilde \tau }}{{M}} \end{array} \right)< 0 \\ \end{split} $$ 则系统(2)的平衡点
${{{z}}^ * }$ 是GES。定理3 假设(H)成立,
${x_i}({t_k}) \!=\! {\lambda _{ik}}{x_i}({t_k}^ - \!)$ ,$\lambda _{ik}^2 \!\leqslant\!\! 1$ 。当${q_i} = q,\;i = 1,2, \cdots ,n$ 时,若存在矩阵${{P}} = {({p_{ij}})_{n \times n}} > 0$ ,${{M}} > 0$ ,${{D}} = {\rm{diag}}({d_1},{d_2}, \cdots ,{d_n}) > 0$ ,和常数$\sigma $ 满足$0 < (\sigma - 1) < 2\min \{ {c_i}\} $ 使得:$$ \begin{split} &\qquad\qquad\qquad\qquad\qquad\qquad {{\varXi}} = \\ & \left(\!\!\!\! \begin{array}{l} (\sigma - 1){{P}}\!\! -\!\! {{{C}}^{\rm{T}}}{{P}} \!\!- \!\!{{{P}}^{\rm{T}}}{{C}} \;\;\;{{{P}}^{\rm{T}}}{{A}} + \dfrac{1}{2}(\sigma - 1){{D}}\quad \;{{{B}}^{\rm{T}}}{{P}} \\ {{{A}}^{\rm{T}}}{{P}} + \dfrac{1}{2}(\sigma - 1){{D}} \quad \;\;- {{{D}}{{CL}}^{ - 1}} \!\!+\!\! {{M}} \!\!+\!\! {{D}}{{A}}\quad \dfrac{1}{2}{{{D}}^{\rm{T}}}{{B}} \\ \qquad {{{P}}^{\rm{T}}}{{B}}\quad \quad \quad \quad \;\; \; \dfrac{1}{2}{{{B}}^{\rm{T}}}{{D}}\quad \quad \quad \quad\quad \;\;\; - {q^{ - \sigma }}{{M}} \\ \end{array} \!\!\!\!\right)< 0\\ \end{split} $$ 则系统(1)的平衡点
${{{x}}^ * }$ 是GPS。证明:当
${q_i} = q,\;i = 1,2, \cdots ,n$ 时,则有系统(2)和(3)中的${\tau _i} = \tau ,\;i = 1,2, \cdots ,n$ 。 考虑如下Lyapunov泛函:$$\begin{split} & V(t) = {{\rm{e}}^{(\sigma - 1)t}}{{{y}}^{\rm{T}}}(t){{Py}}(t) + \mathop \sum \limits_{i = 1}^n {{\rm{e}}^{(\sigma - 1)t}}{d_i}\int_0^{{y_i}(t)} {{g_i}(s)} {\rm{d}}s + \!\!\!\\ & \qquad \quad \;\; \int_{t - \tau }^t {{{\rm{e}}^{\sigma \theta }}{{{g}}^{\rm{T}}}({{y}}(\theta ))} {{Mg}}({{y}}(\theta )){\rm{d}}\theta \!\!\!\!\!\!\!\!\!\!\!\! \end{split} $$ (15) 式中,
${{P}} = {({p_{ij}})_{n \times n}} > 0,\;{{M}} > 0,\;\sigma > 1,\;{d_i} > 0,\;\;i = 1, 2, \cdots ,n$ 。当
$t \ne {t_k}$ 时,将式(14)沿系统(3)对$t$ 进行求导,得:$$ \begin{gathered} \dot V(t) = {{\rm{e}}^{(\sigma - 1)t}}[(\sigma - 1){{{y}}^{\rm{T}}}(t){{Py}}(t) + \\ \;\;2{{{y}}^{\rm{T}}}(t){{P}}\dot {{y}}(t) + \sum\limits_{i = 1}^n {(\sigma - 1){d_i}} \int_0^{{y_i}(t)} {{g_i}(s)} {\rm{d}}s] + \\ \;\;{{\rm{e}}^{(\sigma - 1)t}}\mathop \sum \limits_{i = 1}^n {g_i}({y_i}(t)){d_i}{{\dot y}_i}(t) + {{\rm{e}}^{\sigma t}}{{{g}}^{\rm{T}}}({{y}}(t)){{Mg}}({{y}}(t)) - \\ \;\;{{\rm{e}}^{\sigma t}}{{{g}}^{\rm{T}}}({{y}}(t - \tau )){{\rm{e}}^{ - \sigma \tau }}{{Mg}}({{y}}(t - \tau )) \leqslant \\ {{\rm{e}}^{(\sigma - 1)t}}[(\sigma - 1){{{y}}^{\rm{T}}}(t){{Py}}(t) + 2{{{y}}^{\rm{T}}}(t){{P}}\dot {{y}}(t) + \\ \sum\limits_{i = 1}^n {(\sigma - 1){g_i}({y_i}(t)){d_i}{y_i}(t)} ] + \\ \;\;{{\rm{e}}^{(\sigma - 1)t}}\sum\limits_{i = 1}^n {{g_i}({y_i}(t)){d_i}{{\dot y}_i}(t)} + {{\rm{e}}^{\sigma t}}{{{g}}^{\rm{T}}}({{y}}(t)){{Mg}}({{y}}(t)) - \\ \;\;{{\rm{e}}^{\sigma t}}{{{g}}^{\rm{T}}}({{y}}(t - \tau )){{\rm{e}}^{ - \sigma \tau }}{{Mg}}({{y}}(t - \tau )) \leqslant {{\rm{e}}^{\sigma t}}{{{\xi }}^{\rm{T}}}(t){{\varXi \xi }}(t) \end{gathered} $$ 中间过程与定理1的证明类似,这里省略。其中
${{\xi}} (t) = ({{{y}}^{\rm{T}}}(t),{{{g}}^{\rm{T}}}({{y}}(t)),{{{g}}^{\rm{T}}}({{y}}(t - \tau )))$ 。由定理3的条件${{\varXi}} < 0$ ,可得:$$\dot V(t) \leqslant 0\quad t \ne t{}_k$$ (16) 另一方面,当
$t \ne {t_k}$ 时,由式(15),得:$$ \begin{gathered} V({t_k}) = {{\rm{e}}^{(\sigma - 1){t_k}}}(\sum\limits_{i = 1}^n {\sum\limits_{j = 1}^n {{y_i}({t_k}){P_{ij}}{y_j}({t_k})} } + \\ \sum\limits_{i = 1}^n {{d_i}} \int_0^{{y_i}({t_k})} {{g_i}(s)} {\rm{d}}s) + \int_{{t_k} - \tau }^{{t_k}} {{{\rm{e}}^{\sigma \theta }}{{{g}}^{\rm{T}}}({{y}}(\theta ))} {{Mg}}({{y}}(\theta )){\rm{d}}\theta =\\ \sum\limits_{i = 1}^n {\sum\limits_{j = 1}^n {{{\rm{e}}^{(\sigma - 1){t_k}^ - }}} } \lambda _{ik}^2{y_i}({t_k}^ - ){P_{ij}}{y_j}({t_k}^ - ) + \\ \end{gathered} $$ $$ \begin{gathered} \sum\limits_{i = 1}^n {{{\rm{e}}^{(\sigma - 1){t_k}^ - }}{d_i}} \int_0^{{\lambda _{ik}}{y_i}({t_k}^ - )} {{g_i}(s)} {\rm{d}}s + \\ \int_{{t_k}^ - - \tau }^{{t_k}^ - } {{{\rm{e}}^{\sigma \theta }}{{{ g}}^{\rm{T}}}({{y}}(\theta ))}{{ Mg}}(y(\theta )){\rm{d}}\theta \end{gathered} $$ 由于
$\lambda _{ik}^2 \leqslant 1$ ,则$\int_0^{{\lambda _{ik}}{y_i}({t_k}^ - )} {{g_i}(s)} {\rm{d}}s \leqslant \int_0^{{y_i}({t_k}^ - )} {{g_i}(s)} {\rm{d}}s$ 。于是,得:$$\begin{split} &\qquad\qquad\qquad\quad V({t_k}) \leqslant V({t_k}^ - ) = \\ & {{\rm{e}}^{(\sigma - 1){t_k}^ - }}{{{y}}^{\rm{T}}}({t_k}^ - ){{Py}}({t_k}^ - )\; + \sum\limits_{i = 1}^n {{{\rm{e}}^{(\sigma - 1){t_k}^ - }}{d_i}} \int_0^{{y_i}({t_k}^ - )} {{g_i}(s)} {\rm{d}}s + \\ &\qquad\qquad\quad \;\;\int_{{t_k}^ - - \tau }^{{t_k}^ - } {{{\rm{e}}^{\sigma \theta }}{{{g}}^{\rm{T}}}({{y}}(\theta ))} {{Mg}}({{y}}(\theta )){\rm{d}}\theta \end{split} $$ (17) 由式(16)和式(17)可知,当
$t \geqslant \log {t_0}$ 时,得:$$V(t) \leqslant V(\log {t_0})\quad t \in ({t_{k - 1}},{t_k}],\;k \in {\mathbb{N}^ * }$$ 当且仅当
${{y}}(t) \!=\! {{g}}({{y}}(t)) \!=\! {{g}}({{y}}(t\! -\! \tau ))$ 时,$\dot V(t)\! =\! 0$ 。且:$$ \begin{gathered} V(\log {t_0}) = {{\rm{e}}^{(\sigma - 1)\log {t_0}}}{{{y}}^{\rm{T}}}(\log {t_0}){{Py}}(\log {t_0}) + \\ \mathop \sum \limits_{i = 1}^n {{\rm{e}}^{(\sigma - 1)\log {t_0}}}{d_i}\int_0^{{y_i}(\log {t_0})} {{g_i}(s)} {\rm{d}}s + \\ \int_{\log \tilde q{t_0}}^{\log {t_0}} {{{\rm{e}}^{\sigma \theta }}{{{g}}^{\rm{T}}}({{y}}(\theta ))} {{Mg}}({{y}}(\theta )){\rm{d}}\theta \leqslant \\ {{\rm{e}}^{(\sigma - 1)\log {t_0}}}{{{y}}^{\rm{T}}}(\log {t_0}){{Py}}(\log {t_0})+\\ \mathop \sum \limits_{i = 1}^n {{\rm{e}}^{(\sigma - 1)\log {t_0}}}{d_{^i}}{g_i}({y_i}(\log {t_0})){y_i}(\log {t_0}) + \\ \int_{{\rm{log}}\tilde q{t_0}}^{\log {t_0}} {{{\rm{e}}^{\sigma \theta }}{{{y}}^{\rm{T}}}(\theta ))} {{LMLy}}(\theta ){\rm{d}}\theta \leqslant \\ {{\rm{e}}^{(\sigma - 1)\log {t_0}}}\left( {{{{y}}^{\rm{T}}}(\log {t_0}){{Py}}(\log {t_0}) + {{{y}}^{\rm{T}}}(\log {t_0}){{LDy}}(\log {t_0})} \right) + \\ \left[ {{\lambda _M}({{LML}})t_0^\sigma {\sigma ^{ - 1}}} \right]\mathop {\sup }\limits_{\log \tilde q{t_0} \leqslant \theta \leqslant \log {t_0}} ||{{y}}(\theta )|{|^2} \leqslant \\ {{\rm{e}}^{(\sigma - 1)\log {t_0}}}{\lambda _M}({{P}} + {{LD}})||{{y}}(\log {t_0})|{|^2} + \\ \left[ {{\lambda _M}({{LML}})t_0^\sigma {\sigma ^{ - 1}}} \right]\mathop {\sup }\limits_{\log \tilde q{t_0} \leqslant \theta \leqslant \log {t_0}} ||{{y}}(\theta )|{|^2} \leqslant \\ {{\rm{e}}^{(\sigma - 1)\log {t_0}}}\{ {\lambda _M}({{P}} + {{LD}}) + \\ {\lambda _M}\left( {{{LML}}} \right)t_0^\sigma {\sigma ^{ - 1}}\} \mathop {\sup }\limits_{\log \tilde q{t_0} \leqslant \theta \leqslant \log {t_0}} ||{{\eta }}(\theta )|{|^2} \end{gathered} $$ 又因为:
$${{\rm{e}}^{(\sigma - 1)t}}{{{y}}^{\rm{T}}}(t){{Py}}(t) \leqslant V(t) \leqslant V(\log {t_0})$$ 于是,有:
$$\begin{gathered} {\lambda _m}{\rm{(}}{{P}}{\rm{)}}{{\rm{e}}^{(\sigma - 1)t}}||{{y}}(t)|{|^2} \leqslant {{\rm{e}}^{(\sigma - 1)t}}{{{y}}^{\rm{T}}}(t){{Py}}(t) \leqslant \\ {{\rm{e}}^{(\sigma - 1)\log {t_0}}}{\rm{\{ }}{\lambda _M}({{P}} + {{LD}}) + \\ \;\;{\lambda _M}\left( {{{LQL}}} \right)t_0^\sigma {\sigma ^{ - 1}}{\rm{\} }}\mathop {\sup }\limits_{\log \tilde q{t_0} \leqslant \theta \leqslant \log {t_0}} ||{{\eta}} (\theta )|{|^2} \end{gathered} $$ 所以:
$$\begin{split} &\;\;\qquad{\left\| {{{y}}(t)} \right\|^2} \leqslant \frac{1}{{{\lambda _m}({{P}})}}\{ {\lambda _M}({{P}} + {{LD}}) + \\ &{\lambda _M}({{LQL}})t_0^\sigma {\sigma ^{ - 1}}\} \mathop {\sup }\limits_{\log \tilde q{t_0} \leqslant \theta \leqslant \log {t_0}} ||{{\eta}} (\theta )|{|^2}{{\rm{e}}^{ - \lambda (t - \log {t_0})}} \end{split} $$ (18) 其中
$ \lambda = \sigma - 1 > 0$ 。取:$$\beta = \frac{1}{{{\lambda _m}({{P}})}}{\rm{\{ }}{\lambda _M}({{P}} + {{LD}}) + {\lambda _M}({{LQL}})(1 - {{\rm{e}}^{ - \sigma \tau }}){\sigma ^{ - 1}}{\rm{\} }} \geqslant 1$$ 因此,由(18),得:
$$||{{y}}(t)|{|^2} \leqslant \beta \mathop {\sup }\limits_{\log \tilde q{t_0} \leqslant \theta \leqslant \log {t_0}} ||{{\eta}} (\theta )||_{}^2{{\rm{e}}^{ - \lambda (t - \log {t_0})}}\;$$ 余下部分与定理1相同。
在定理1、2和3中,当
$\sigma = 1$ 时,则全局多项式稳定性和指数稳定性都退化为全局渐近稳定性。推论1 假设
$(H)$ 成立,${x_i}({t_k}) = {\lambda _{ik}}{x_i}({t_k}^ - )$ ,$\lambda _{ik}^2 \leqslant 1$ 。若存在矩阵${{P}} > 0$ ,${{M}} = {\rm{diag}}({m_1},{m_2}, \cdots ,{m_n}) > 0$ ,${{D}} = {\rm{diag}}({d_1},{d_2}, \cdots ,{d_n}) > 0$ ,使得:$${{\varXi}} = \left( {\begin{array}{*{20}{c}} { - {{{C}}^{\rm{T}}}{{P}} - {{{P}}^{\rm{T}}}{{C}}}&{{{{P}}^{\rm{T}}}{{A}}}&{{{{B}}^{\rm{T}}}{{P}}} \\ {{{{A}}^{\rm{T}}}{{P}}}&{ - {{D}}{{C}}{{{L}}^{ - 1}} + {{M}} + {{D}}{{A}}}&{\dfrac{1}{2}{{{D}}^{\rm{T}}}{{B}}} \\ {{{{P}}^{\rm{T}}}{{B}}}&{\dfrac{1}{2}{{{B}}^{\rm{T}}}{{D}}}&{ - {{\tilde q}^{ - {\rm{l}} }}{{M}}} \end{array}} \right) < 0$$ 则系统(1)和(2)的平衡点
${{{x}}^ * }$ 和${{{z}}^ * }$ 是全局渐近稳定的。推论2 假设(H)成立,
${x_i}({t_k}) = {\lambda _{ik}}{x_i}({t_k}^ - )$ ,$\lambda _{ik}^2 \leqslant 1$ 。当${q_i} = q,i = 1,2, \cdots ,n$ 时,若存在矩阵${{P}} > 0$ ,${{M}} > 0$ 和${{D}} = {\rm{diag}}({d_1},{d_2}, \cdots ,{d_n}) > 0$ ,使得:$${{\varXi}} = \left( {\begin{array}{*{20}{c}} { - {{{C}}^{\rm{T}}}{{P}} - {{{P}}^{\rm{T}}}{{C}}}&{{{{P}}^{\rm{T}}}{{A}}}&{{{{B}}^{\rm{T}}}{{P}}} \\ {{{{A}}^{\rm{T}}}{{P}}}&{ - {{D}}{{C}}{{{L}}^{ - 1}} + {{M}} + {{D}}{{A}}}&{\dfrac{1}{2}{{{D}}^{\rm{T}}}{{B}}} \\ {{{{P}}^{\rm{T}}}{{B}}}&{\dfrac{1}{2}{{{B}}^{\rm{T}}}{{D}}}&{ - {q^{ - 1}}{{M}}} \end{array}} \right) < 0$$ 则系统(1)和(2)的平衡点
${{{x}}^ * }$ 和${{{z}}^ * }$ 都是全局渐近稳定的(GAS)。虽然系统(1)和(2)等价,且具有相同的平衡点
${{{x}}^ * } = {{{z}}^ * }$ ,但是他们的稳定性却不同,系统(2)的平衡点${{{z}}^ * }$ 是GES,系统(1)的平衡点${{{x}}^ * }$ 却是GPS。当
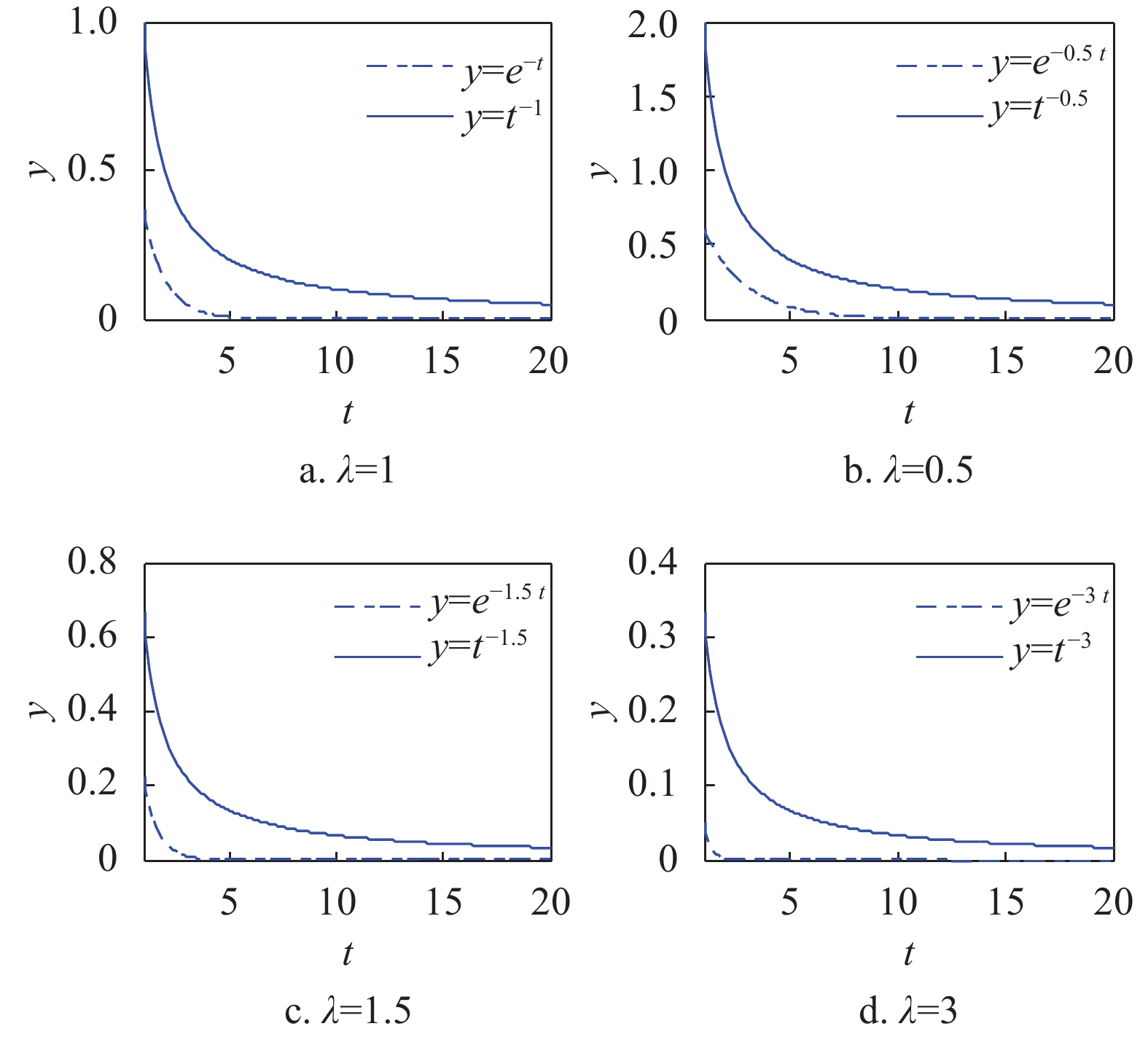
$\lambda = 0.5\text{、}1\text{、}1.5\text{、}3$ 时,函数$y = {t^{ - \lambda }}$ 和$y = {{\rm{e}}^{ - \lambda t}}$ 的函数图像,如图1所示,可以直观地看到多项式稳定性的收敛速度比指数稳定性的慢一些。当系统(1)无脉冲影响时,本文所得结论仍然成立。
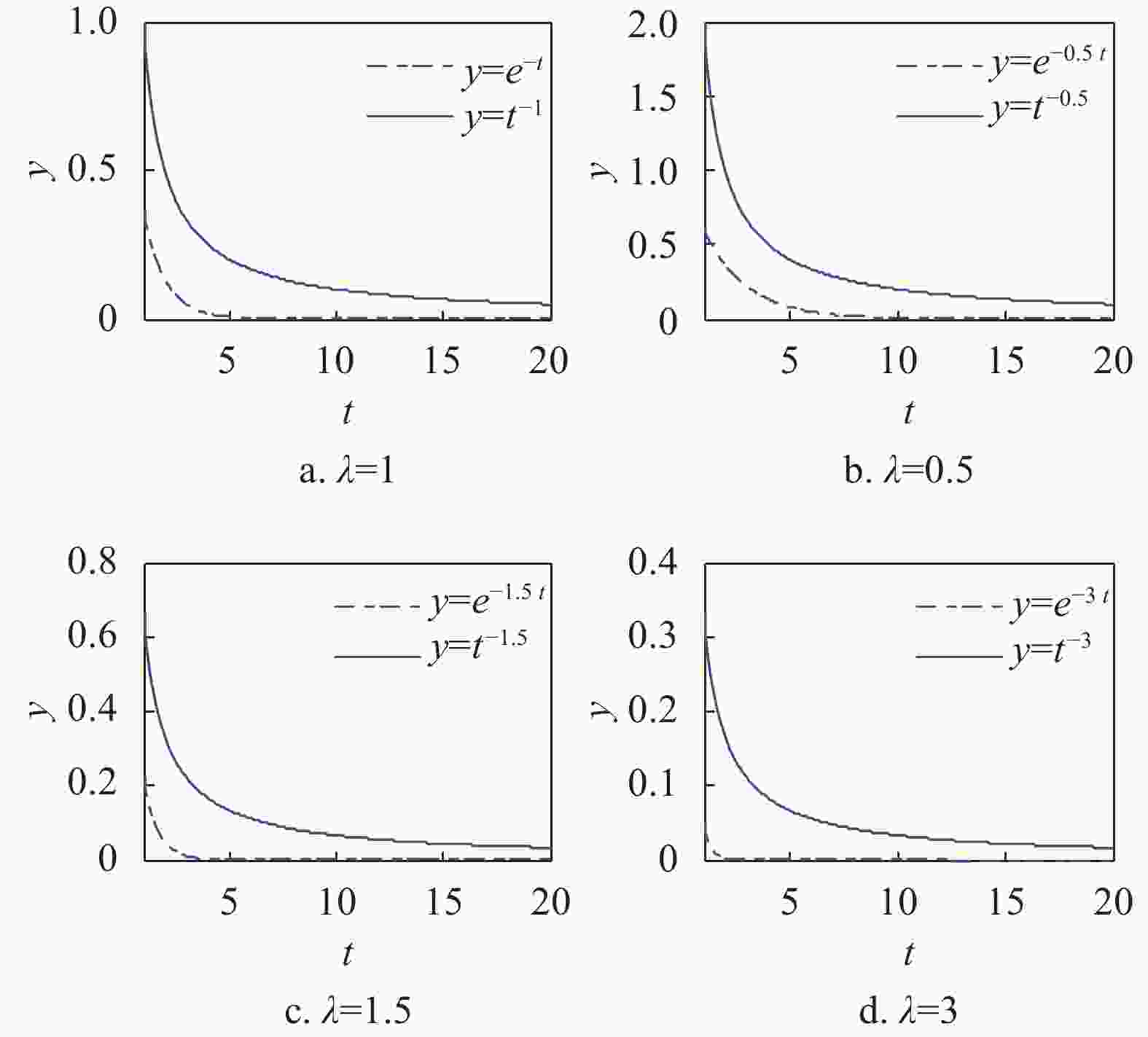
图 1 函数
$y = {t^{ - \lambda }}$ 和$y = {{\rm{e}}^{ - \lambda t}}$ 的图像 -
例1 考虑二维如下RNNs:
$$\left\{ \begin{aligned} & {{\dot x}_1}(t) = - 4.6{x_1}(t) - 2{f_1}({x_1}(t)) + {f_2}({x_2}(t)) + \\ & \quad 1.5{f_1}({x_1}(0.4t)) + 0.2{f_2}({x_2}(0.8t)) + {u_1}\quad t \ne {t_k} \\ & {{\dot x}_2}(t) = - 3{x_2}(t) + {f_1}({x_1}(t)) - 3{f_2}({x_2}(t)) + \\ & \quad 1.4{f_1}({x_1}(0,4t)) + 2.3{f_2}({x_2}(0.8t)) + {u_2}\quad t \ne {t_k} \\ &{x_1}({t_k}) = {E_{1k}}{x_1}({t_k}^ - )\quad k \in {\mathbb{N}^ * } \\ & {x_2}({t_k}) = {E_{2k}}{x_2}({t_k}^ - )\quad k \in {\mathbb{N}^ * } \end{aligned} \right.$$ (19) 式中,
${f_1}({x_1}(t)) = 0.25(|{x_1}(t) + 1| - |{x_1}(t) - 1|)$ ;${f_2}({x_2}(t))=$ $ \sin (0.25{x_2}(t)) + 0.25{x_2}(t)$ ;$ q_1=0.4$ ;$ q_2=0.8$ ;${{u}} = {(0,0)^{\rm{T}}}$ ;${l_i} = 0.5,\;i = 1,2$ ;${{L}} = {\rm{diag}}(0.5,0.5)$ ;${E_{1k}} = - 0.23$ ;${E_{2k}} = 0.38$ 。由式(19),可知:$${{C}} = \left( {\begin{array}{*{20}{c}} \begin{array}{l} 4.6 \\ 0 \\ \end{array} &\begin{array}{l} 0 \\ 3 \\ \end{array} \end{array}} \right),{{A}} = \left( {\begin{array}{*{20}{c}} { - 2}&1 \\ 1&{ - 3} \end{array}} \right),{{B}} = \left( {\begin{array}{*{20}{c}} {1.5}&{0.2} \\ {1.4}&{2.3} \end{array}} \right)$$ 取
${{P}} = {{Q}} = {{D}} = {\rm{diag}}(1,1)$ ,$\sigma = 1.1$ ,通过应用Matlab计算,得:$$ {{\varXi}} = \left( {\begin{array}{*{20}{c}} { - 9.100\;0}&0&{ - 1.950\;0}&{1.000\;0}&{1.500\;0}&{1.400\;0}\\ 0&{ - 5.900\;0}&{1.000\;0}&{ - 2.950\;0}&{0.200\;0}&{2.300\;0}\\ { - 1.950\;0}&{1.000\;0}&{ - 10.200\;0}&{1.000\;0}&{0.750\;0}&{0.100\;0}\\ {1.000\;0}&{ - 2.950\;0}&{1.000\;0}&{ - 8.000\;0}&{0.700\;0}&{{\rm{1}}.150\;0}\\ {1.500\;0}&{1.400\;0}&{ 0.750\;0}&{0.700\;0}&{ - 2.739\;9}&0\\ {0.200\;0}&{2.300\;0}&{0.100\;0}&{1.150\;0}&0&{ - 2.739\;9} \end{array}} \right) $$ 且
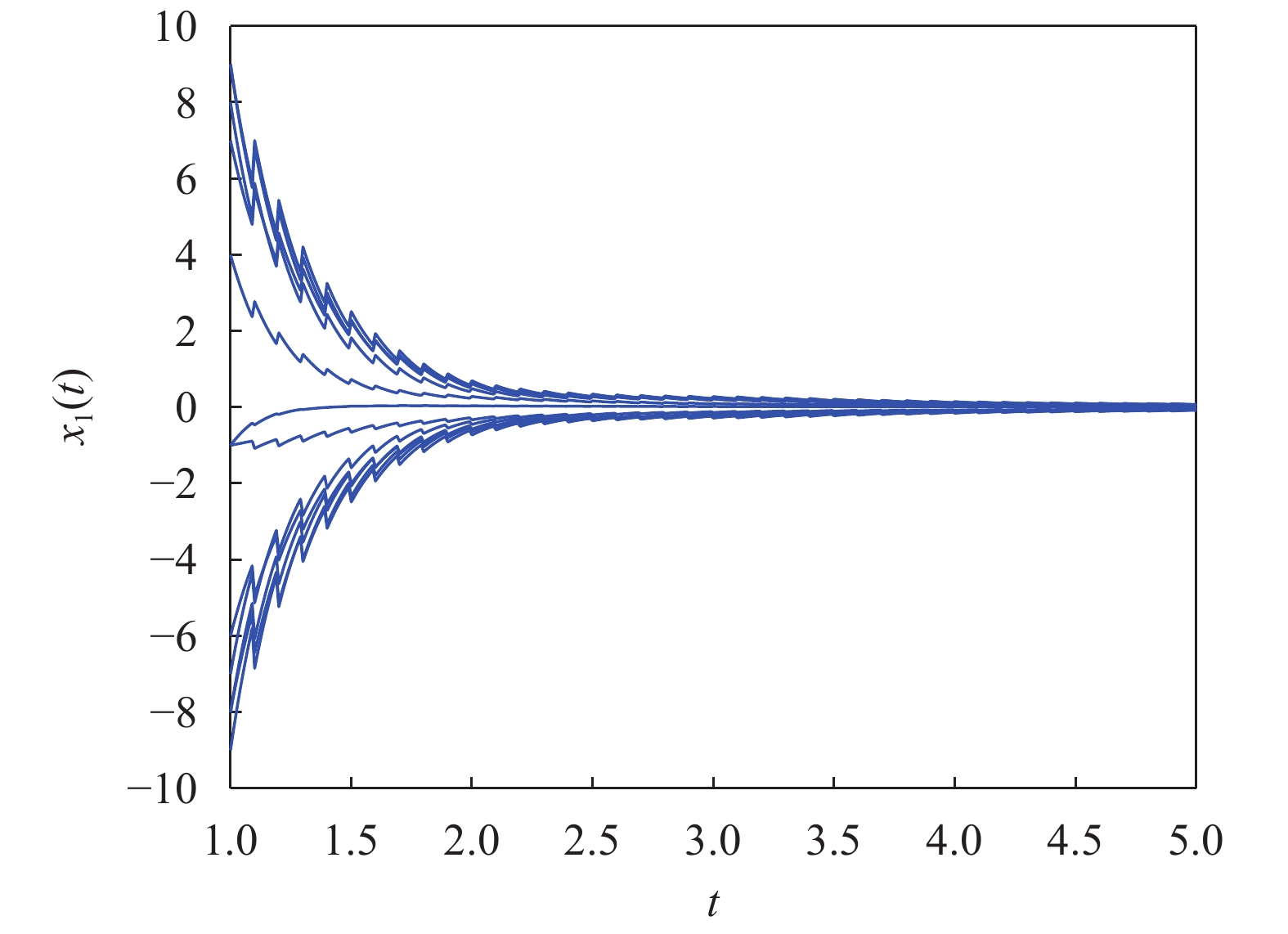
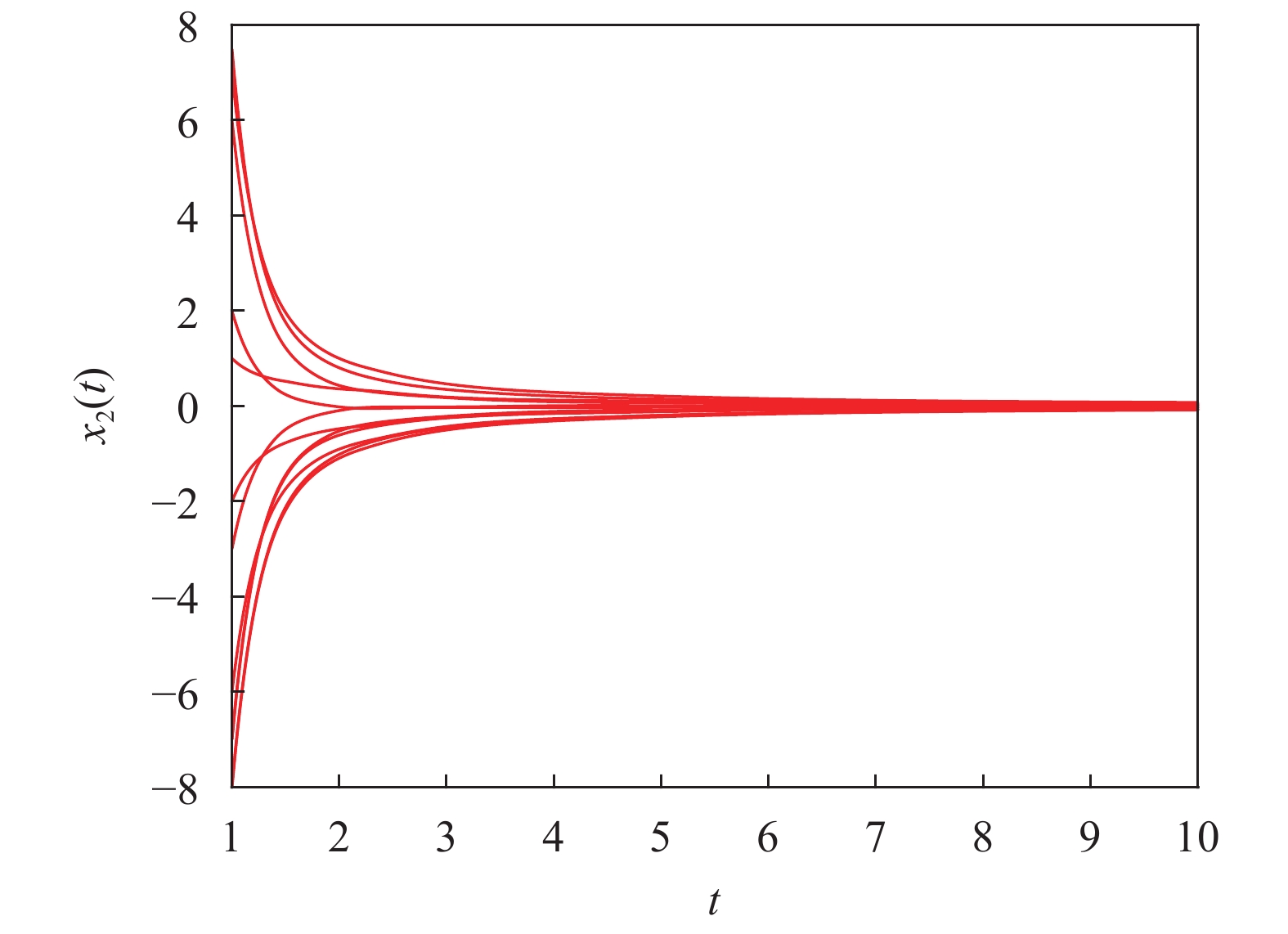
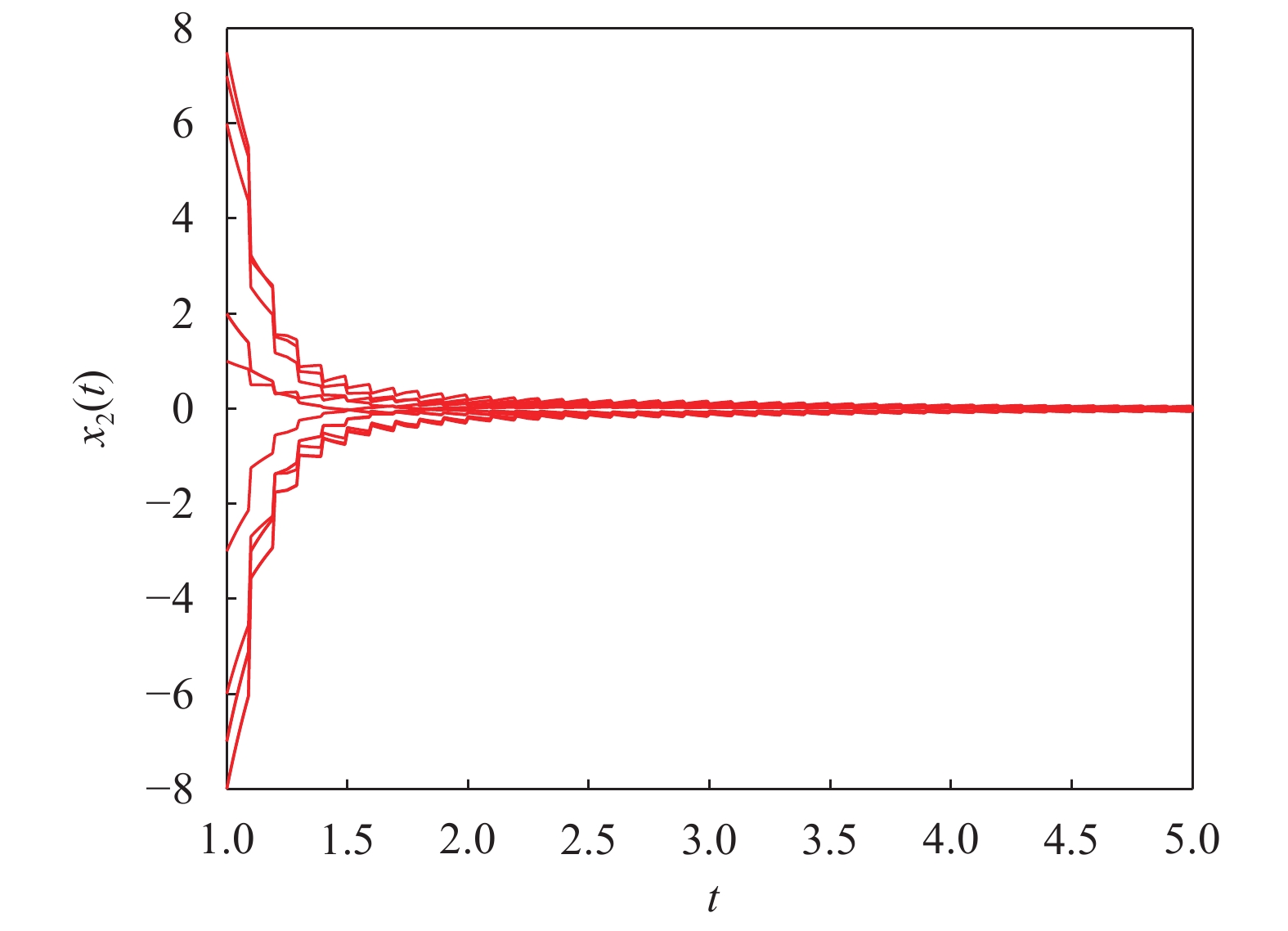
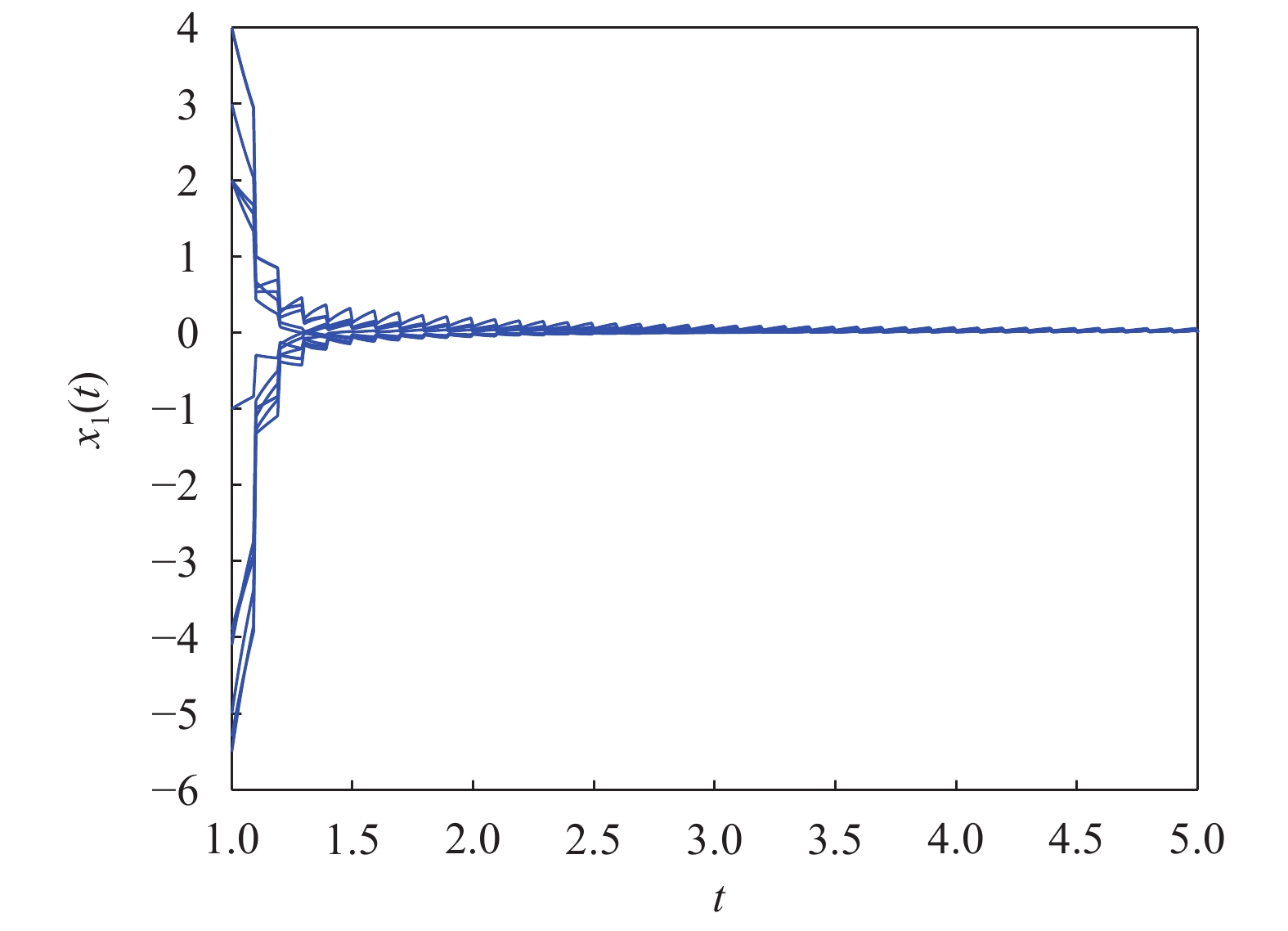
${\lambda _\varXi } $ = −12.756 7, −10.255 2, −7.726 6, −4.182 5, −2.375 5,$ - 1.383\;2$ ,即${{\varXi}} < 0$ 。由定理1可知,系统(19)是GPS。系统(19)的平衡点为${{{x}}^ * } = {(0,0)^{\rm{T}}}$ 。时间响应轨线如图2~图5所示。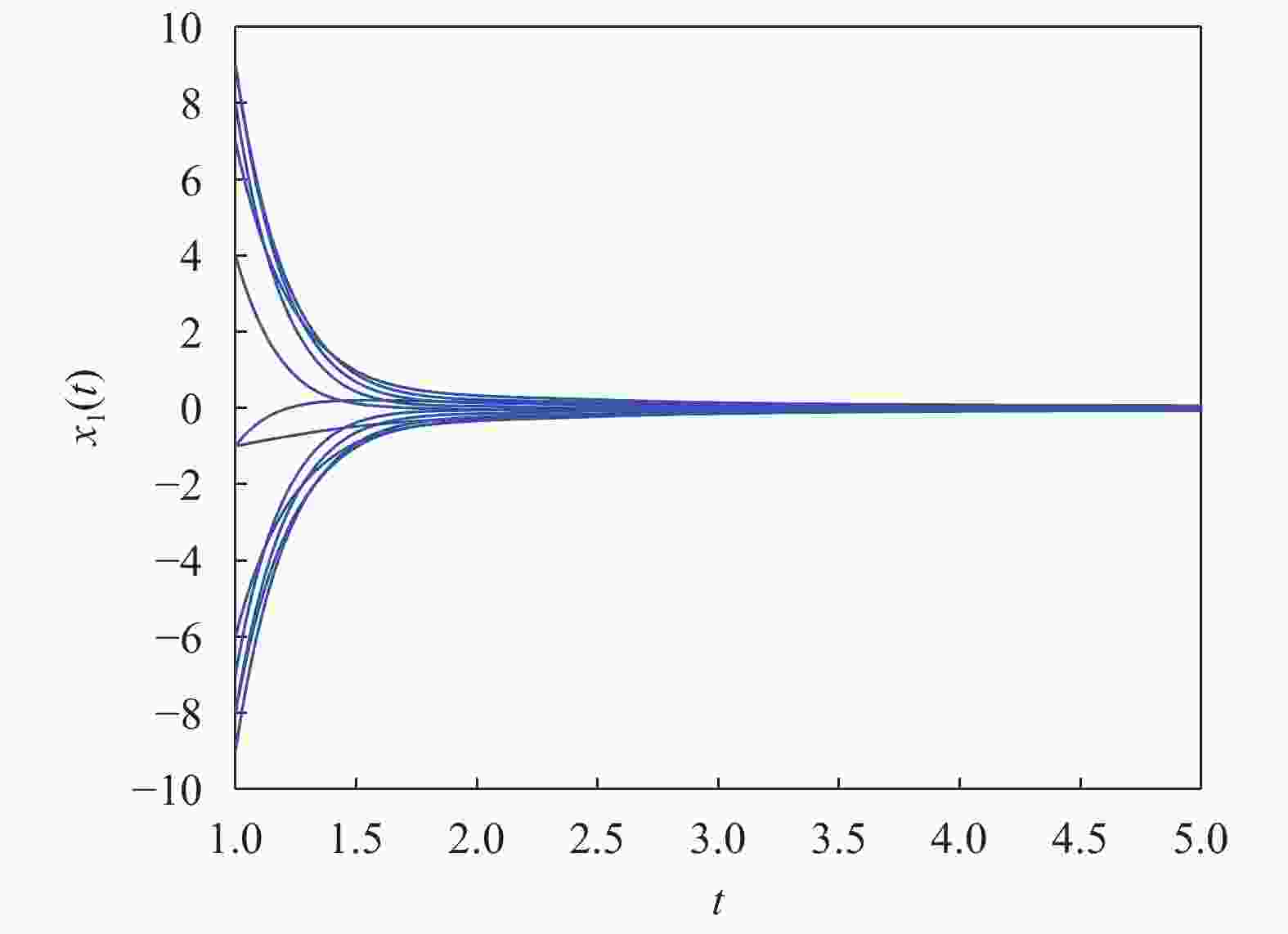
图 2 系统(19)无脉冲时,
${x_1}(t)$ 的时间响应轨线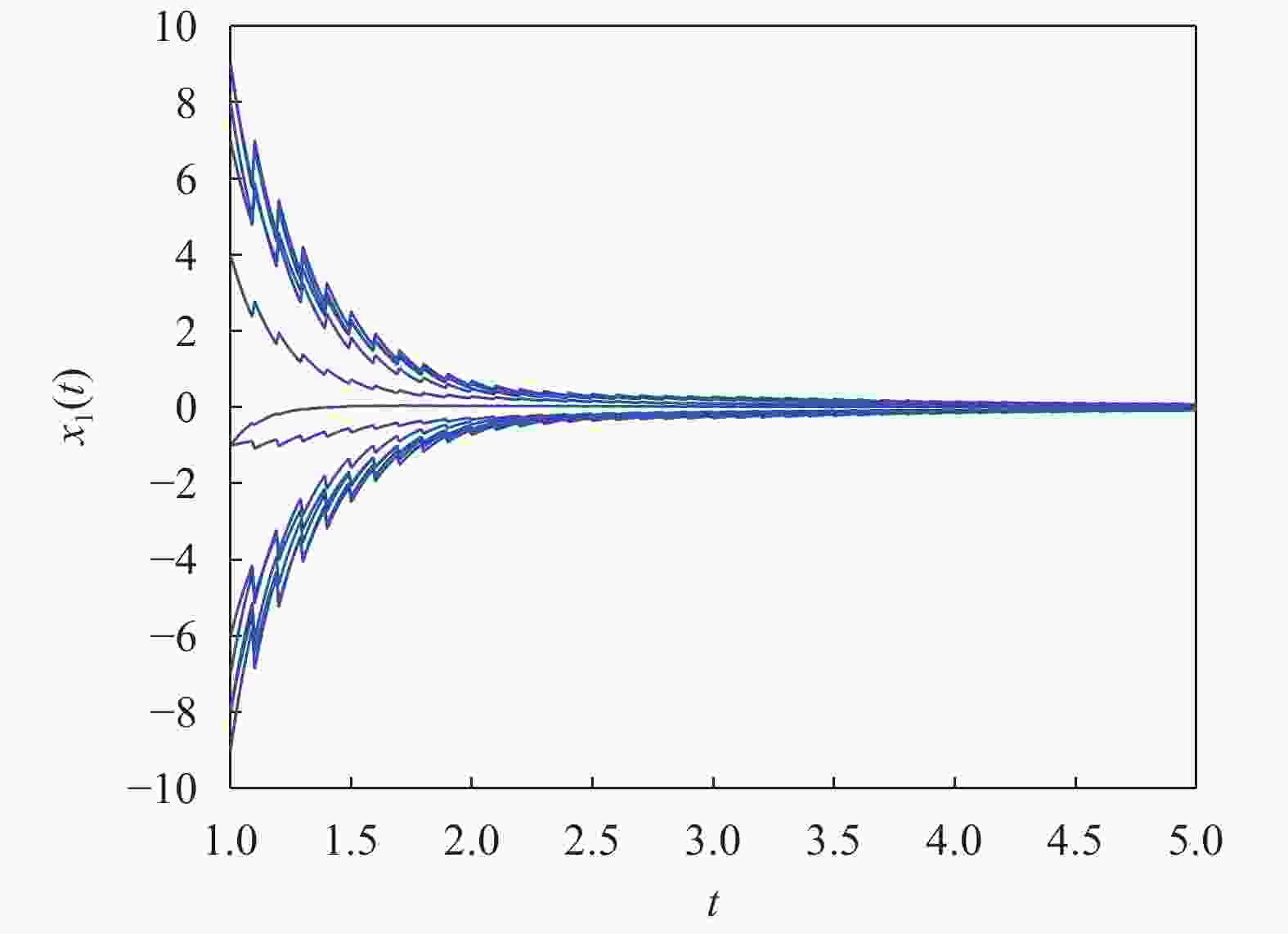
图 3 系统(19)带脉冲时,
${x_1}(t)$ 的时间响应轨线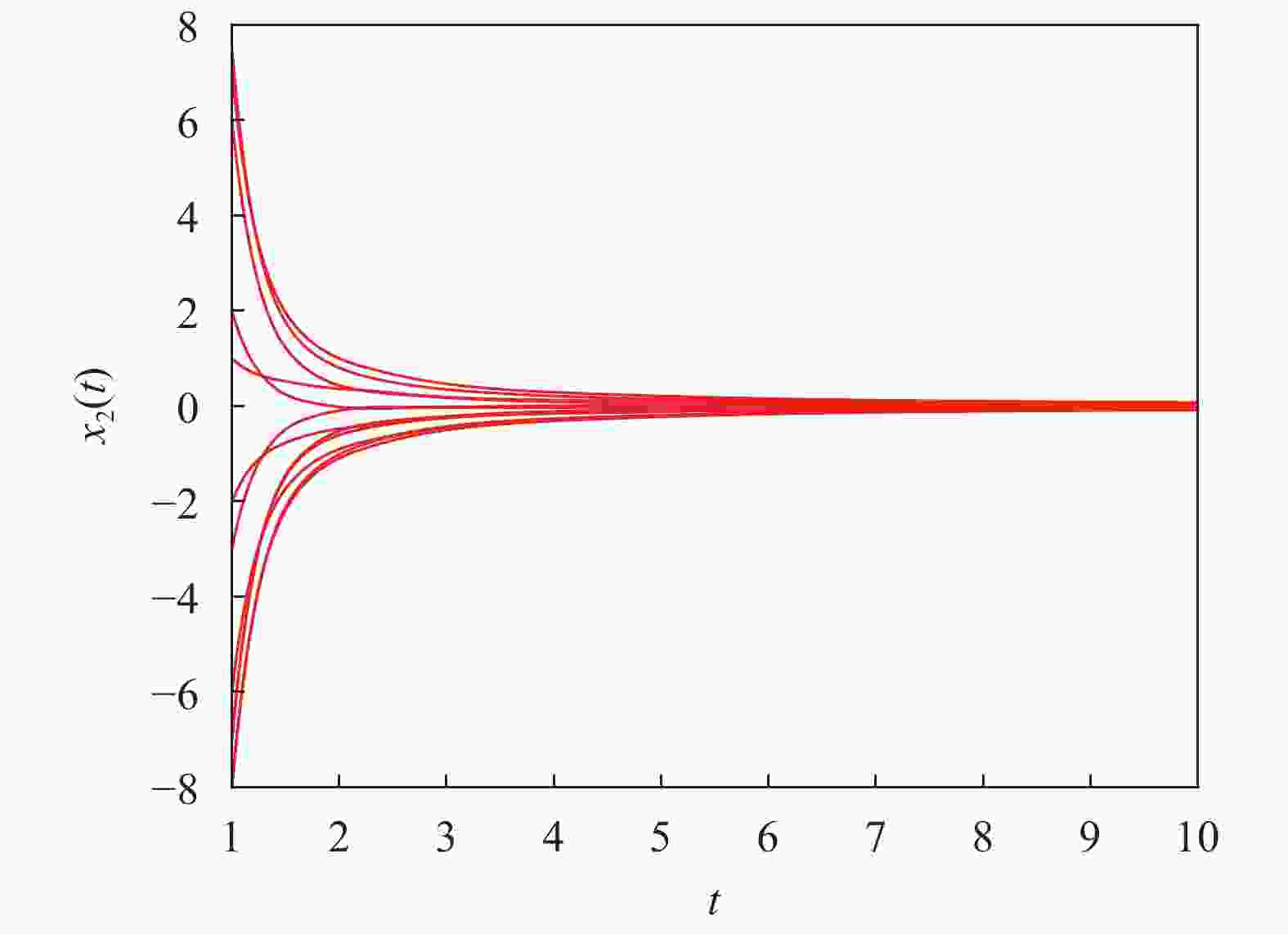
图 4 系统(19)无脉冲时,
${x_2}(t)$ 的时间响应轨线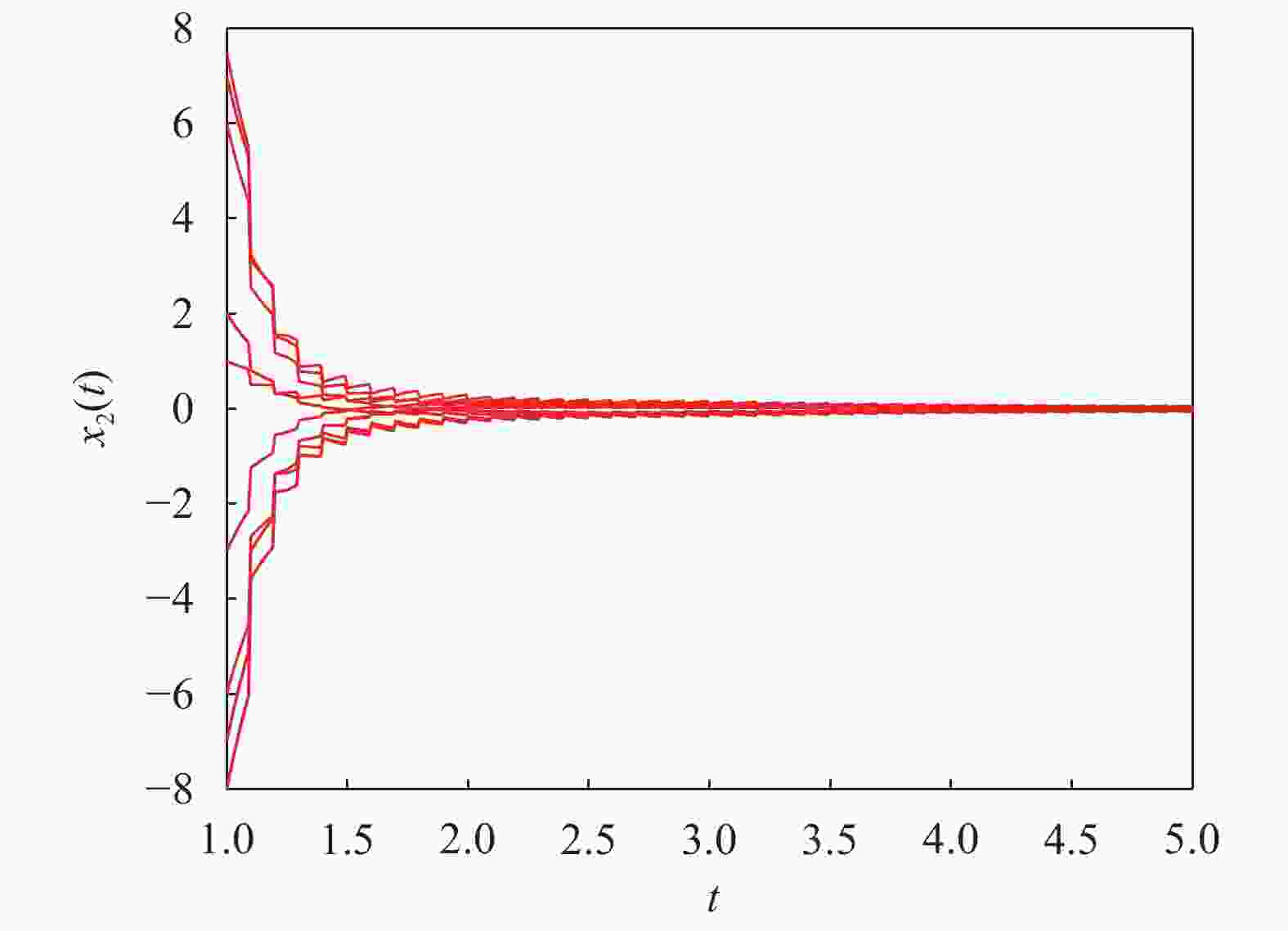
图 5 系统(19)带脉冲时,
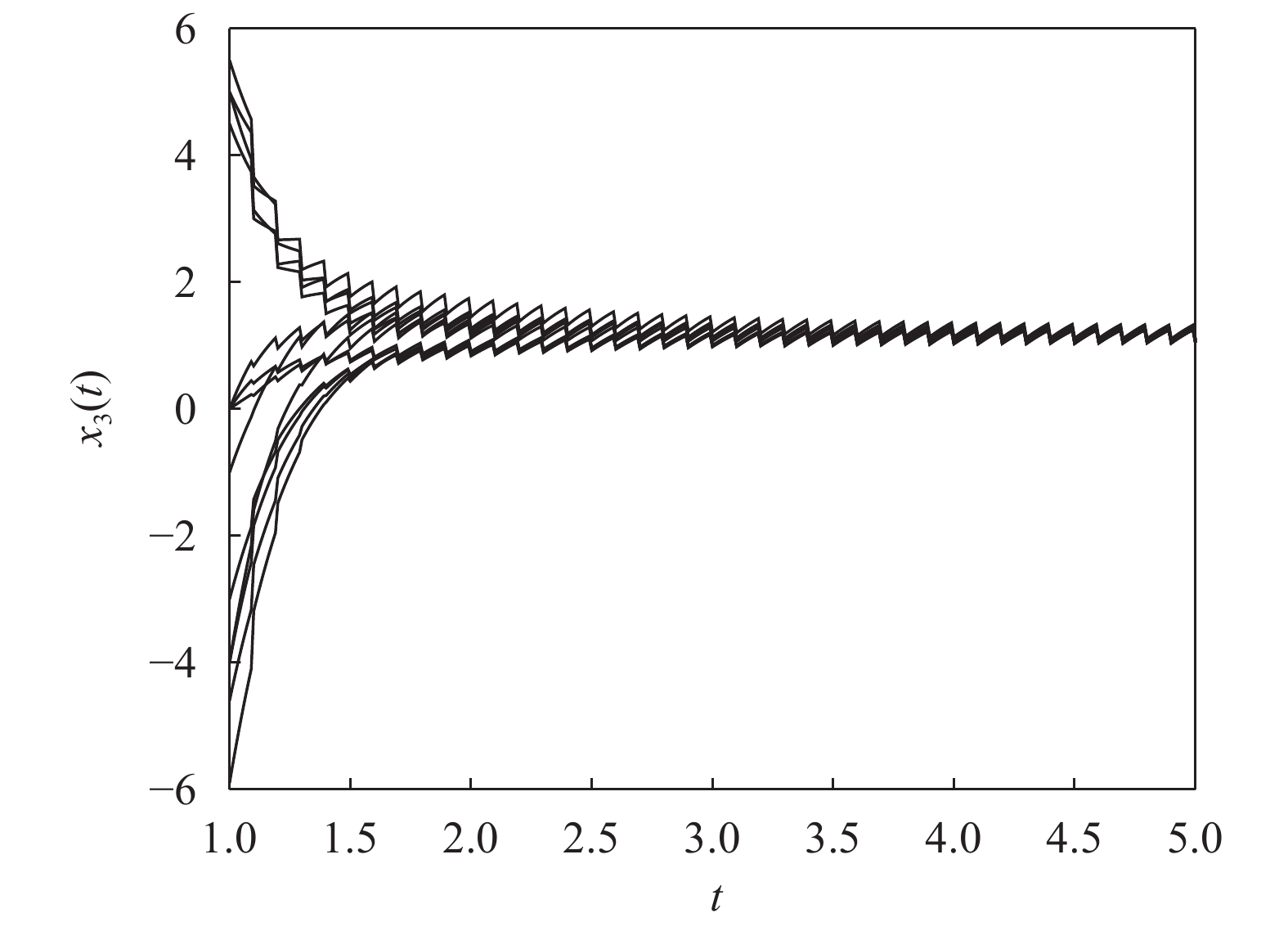
${x_2}(t)$ 的时间响应轨线例2 考虑三维具比例时滞RNNs:
$$\left\{ \begin{aligned} & {{\dot x}_1}(t) = - 3.5{x_1}(t) - 2{f_1}({x_1}(t)) + 1.2{f_2}({x_2}(t)) + \\ & \quad {f_3}({x_3}(t)) + 0.5{f_1}({x_1}(0.3t)) + 0.3{f_2}({x_2}(0.5t) + {u_1} \\ & {{\dot x}_2}(t) = - 5.6{x_2}(t) + 2{f_1}({x_1}(t)) - {f_2}({x_2}(t))) + \\ & \quad 3.2{f_1}({x_1}(0.3t) + 2.4{f_2}({x_2}(0.5t) + {u_2} \\ &{{\dot x}_3}(t) = - 3.7{x_3}(t) + 3{f_1}({x_1}(t)) + 2{f_3}({x_3}(t)) + \\ & \quad 3{f_2}({x_2}(0.5t) + 1.5{f_3}({x_3}(0.8t)) + {u_3} \\ & {x_1}({t_k}) = {E_{1k}}{x_1}({t_k}^ - )\quad k \in {\mathbb{N}^ * } \\ &{x_2}({t_k}) = {E_{2k}}{x_2}({t_k}^ - )\quad k \in {\mathbb{N}^ * } \\ & {x_3}({t_k}) = {E_{3k}}{x_3}({t_k}^ - )\quad k \in {\mathbb{N}^ * } \end{aligned} \right.$$ (20) 式中,
${f_i}({x_i}(t)) = \tanh (0.5{x_i}(t)),\;i = 1,2$ ;${f_3}({x_3}(t)) = $ $\cos ({x_3}(0.2t))$ ,$ q_1=0.3,q_2=0.5,q_3=0.8$ ,$\tilde q = 0.3$ ,${{u}} = {(0, - 3,4)^{\rm{T}}}$ ,${E_{1k}} = 0.63$ ,${E_{2k}} = - 0.28$ ,${E_{3k}} = 0.18$ ,$k \in {\mathbb{N}^ * }$ 。Lipschitz常数为${l_i} = 0.5,\;i = 1,2$ ,$ l_3=0.2$ ,${{L}} = {\rm{diag}}(0.5,0.5,0.2)$ 。由式(20),可知:
$$ \begin{split} &{{C}} = \left( \begin{array}{l} \begin{array}{*{20}{c}} {3.5}&0&0 \end{array} \\ \begin{array}{*{20}{c}} 0&{5.6}&0 \end{array} \\ \begin{array}{*{20}{c}} 0&{\;\;0}&{\;3.7} \end{array} \\ \end{array} \right),\;{{A}} = \left( {\begin{array}{*{20}{c}} { - 2}&{1.2}&1 \\ 2&{ - 1}&0 \\ 3&0&2 \end{array}} \right),\\ &\qquad\quad\;\; \;{{B}} = \left( {\begin{array}{*{20}{c}} {1.5}&{1.3}&0 \\ {3.2}&{2.4}&0 \\ 0&3&{1.5} \end{array}} \right) \end{split} $$ 利用Matlab找到
$\sigma = 1.236\;7$ 和以下矩阵:$$ \begin{aligned} & {{{P}} = \left( {\begin{array}{*{20}{c}} {1.989\;7}&{0.002\;3}&{0.104\;5} \\ {0.002\;3}&{1.002\;3}&{0.119\;8} \\ {0.104\;5}&{0.119\;8}&{0.998\;7} \end{array}} \right)}\\ & {{{M}} = \left( {\begin{array}{*{20}{c}} {1.567\;8}&0&0 \\ 0&{2.089\;7}&0 \\ 0&0&{3.045\;7} \end{array}} \right)}\\ & {{{D}} = \left( {\begin{array}{*{20}{c}} {2.012\;3}&0&0 \\ 0&{1.478\;5}&0 \\ 0&0&{3.027\;83} \end{array}} \right)} \end{aligned} $$ 得到矩阵
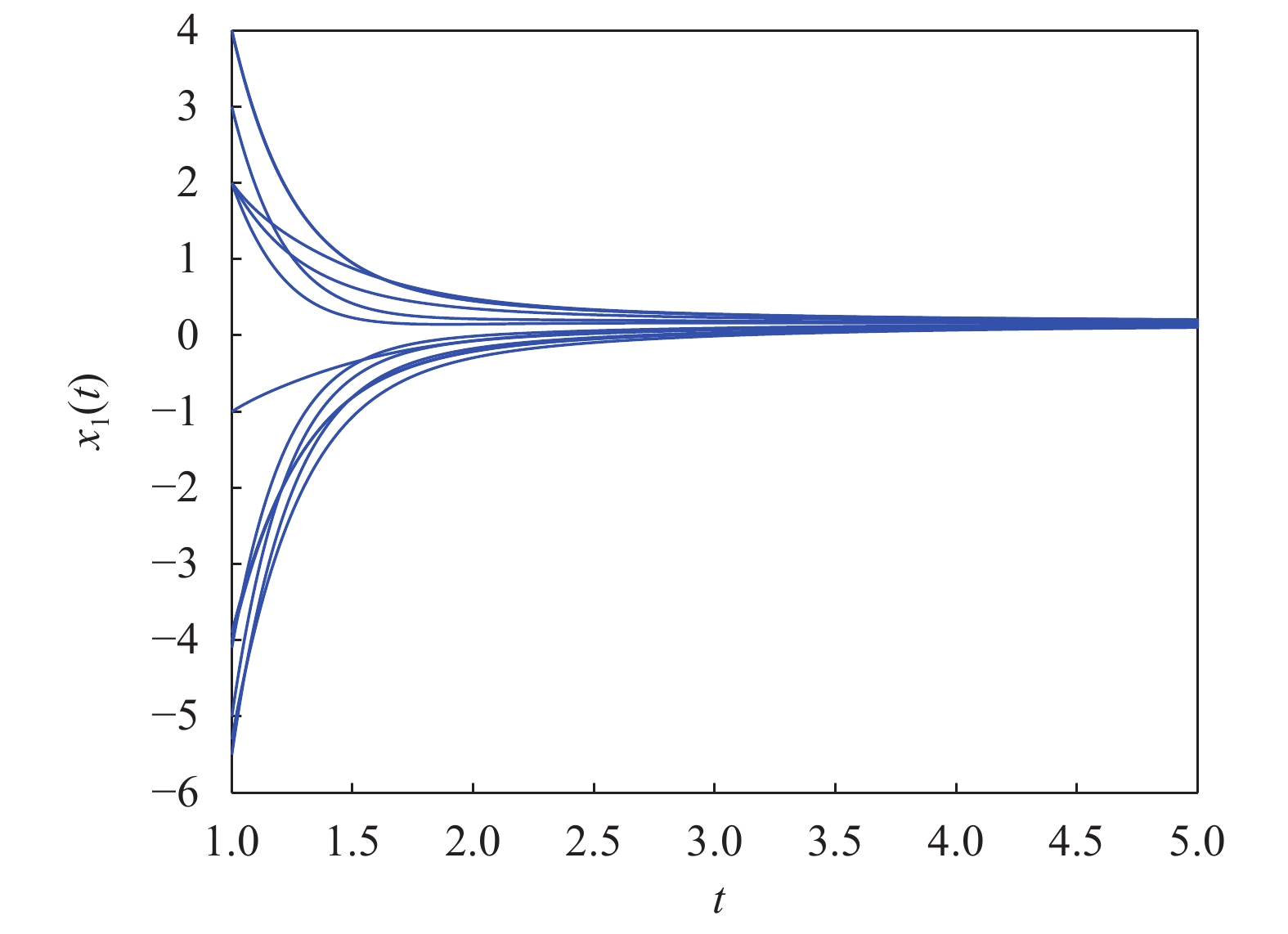
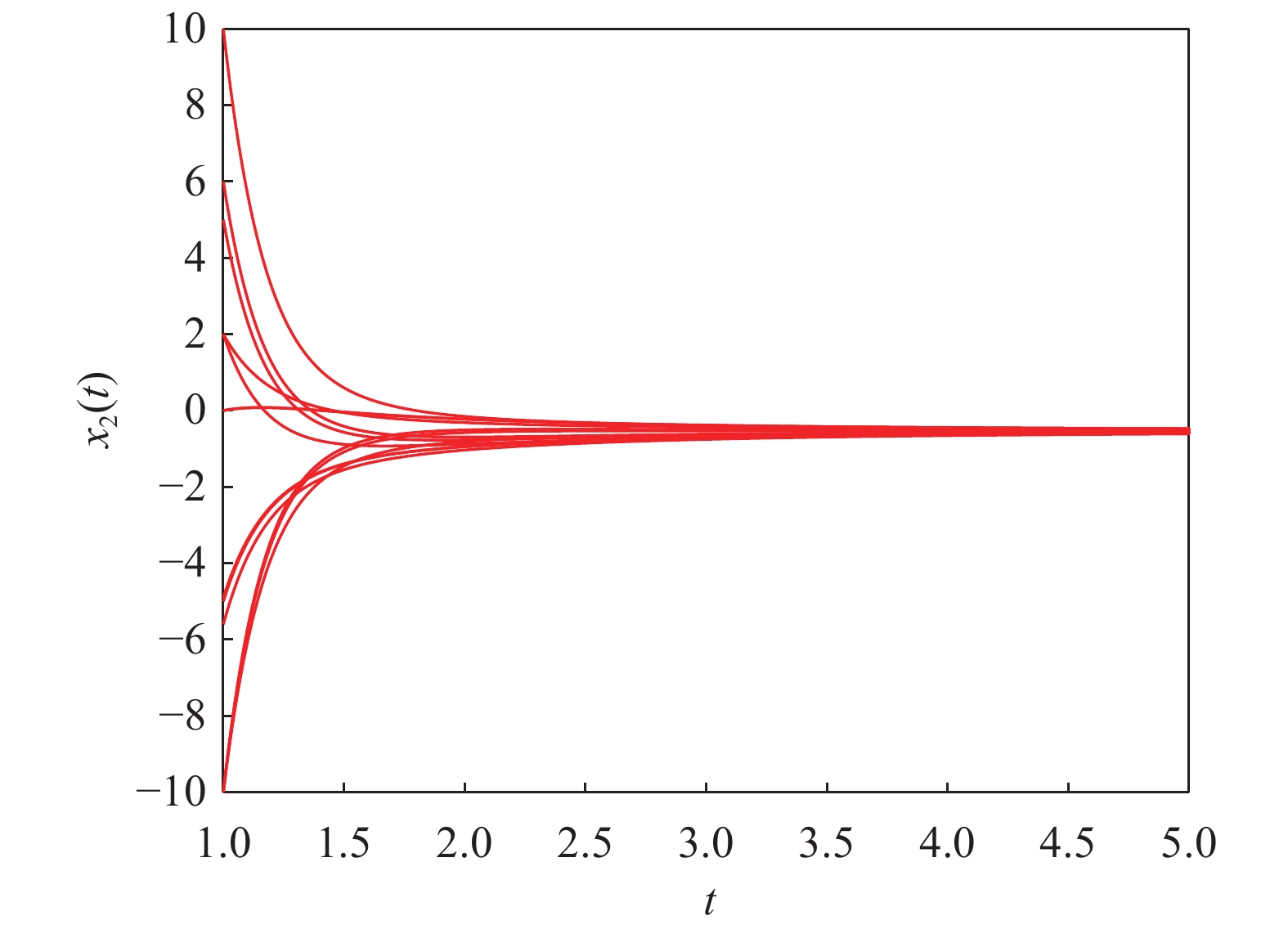
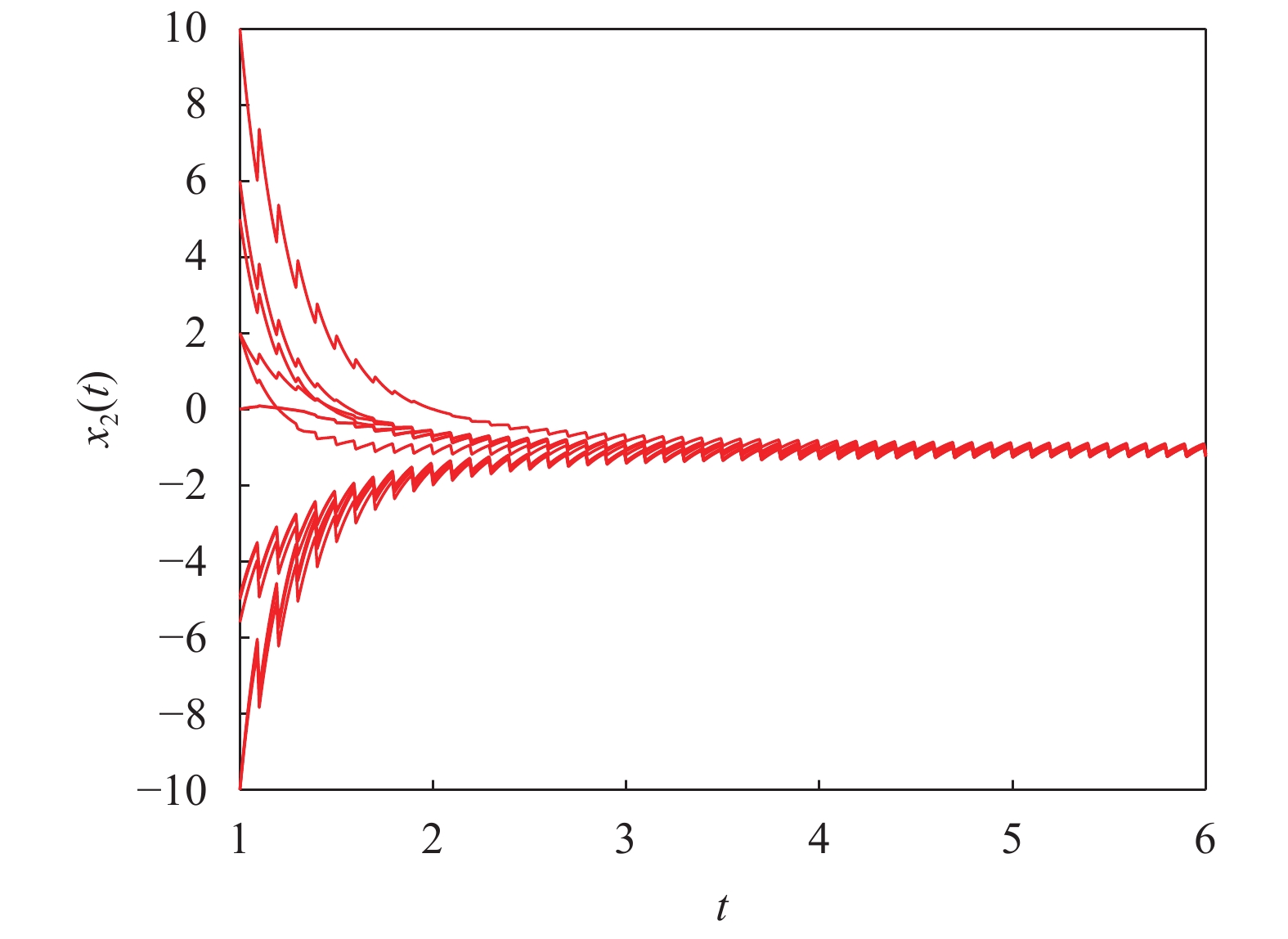
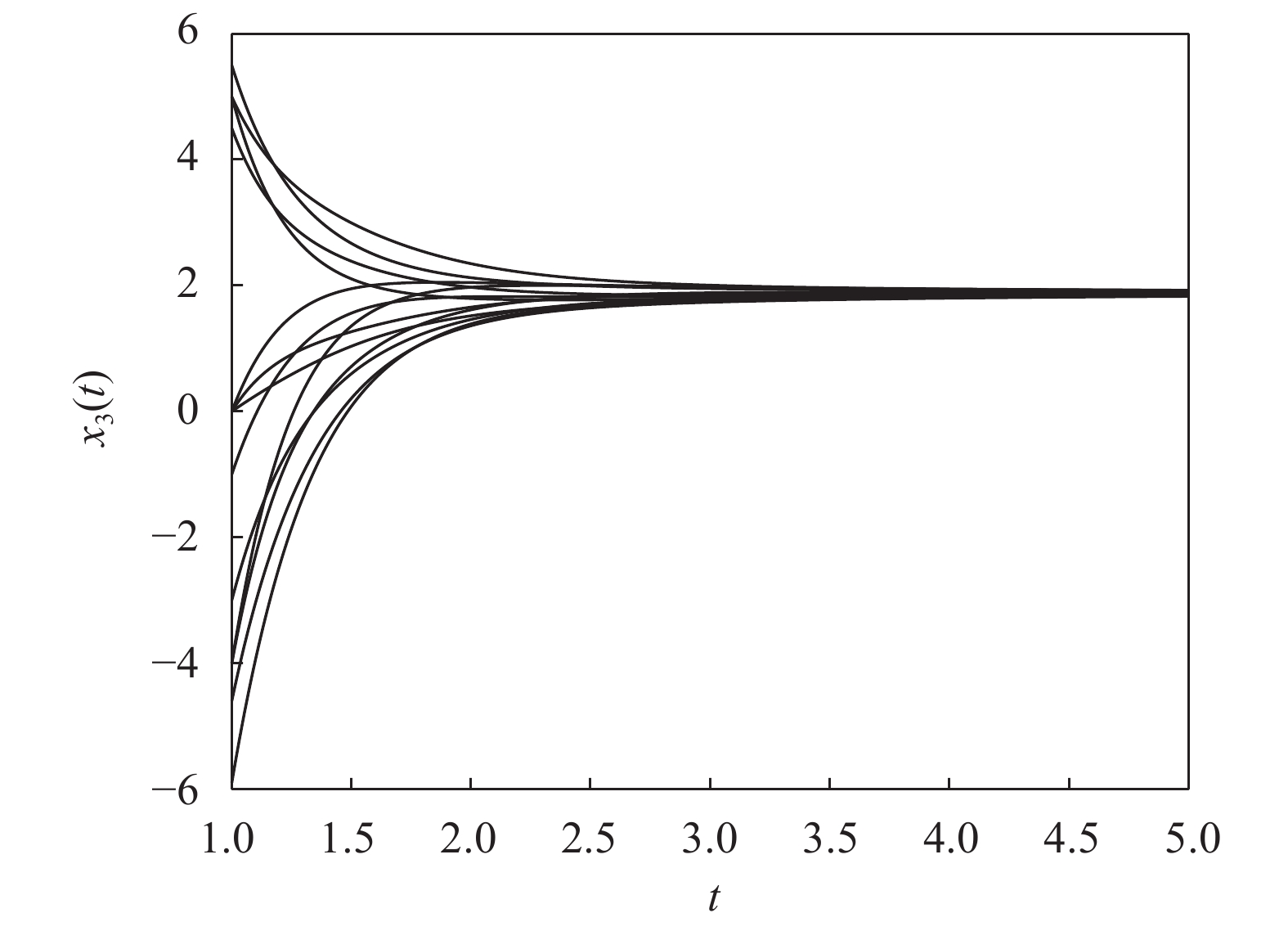
${{\varXi}} $ ,且${\lambda _\varXi } $ = −48.370 1, −21.586 4, −2.085 5, −5.302 1, −17.523 0, −8.011 9, −10.002 8, −14.865 7, −12.968 0, 由此可知$\varXi < 0$ ,由定理1,可知系统(20)是GPS。由Matlab计算,得系统(20)的平衡点为${{{x}}^ * } = (0.154\;5,$ $- 0.539\;5,1.880\;5{)^{\rm{T}}}$ 。时间响应曲线如图6~11所示。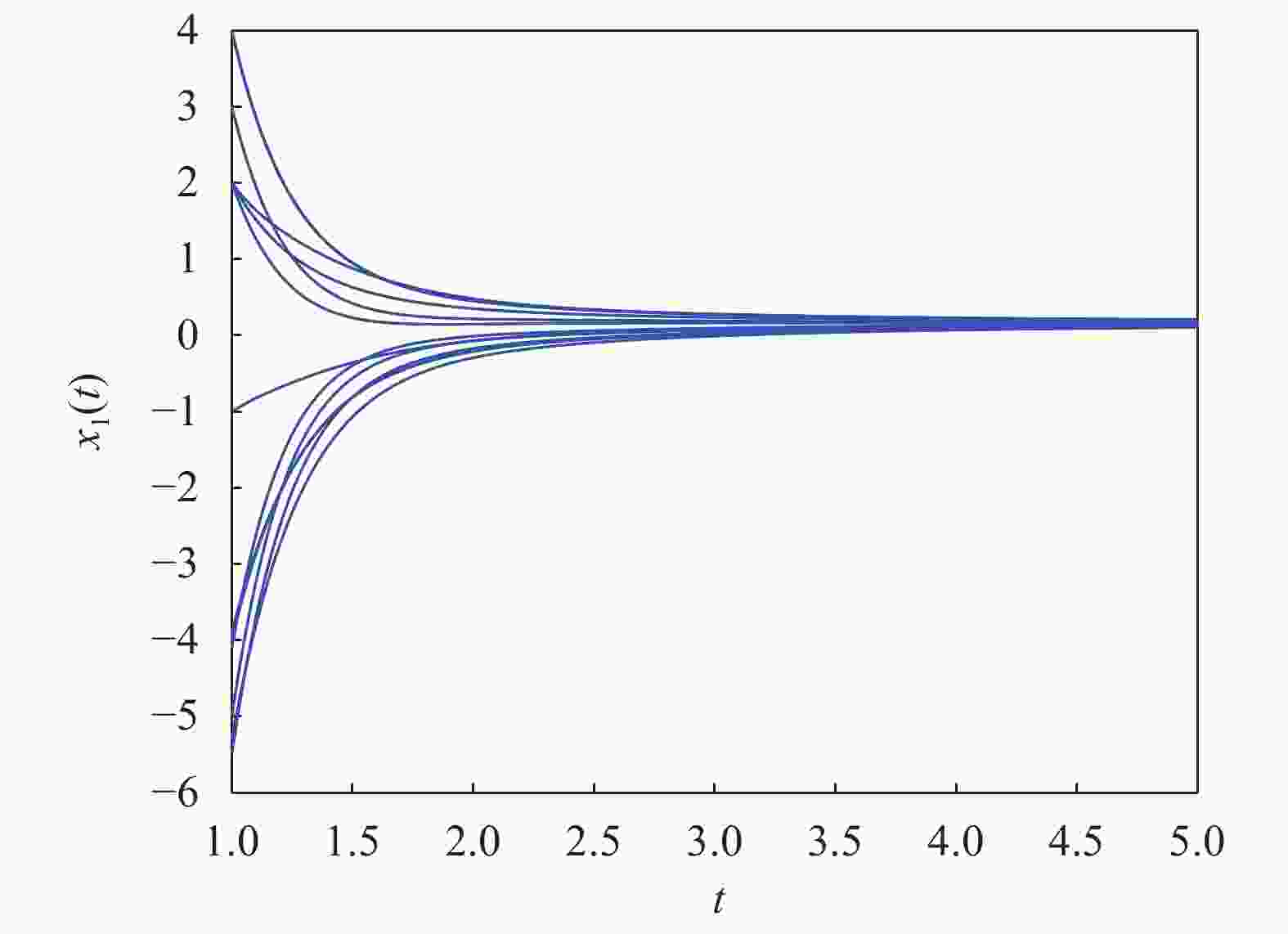
图 6 系统(20)无脉冲时,
${x_1}(t)$ 的时间响应轨线
图 7 系统(20)带脉冲时,
${x_1}(t)$ 的时间响应轨线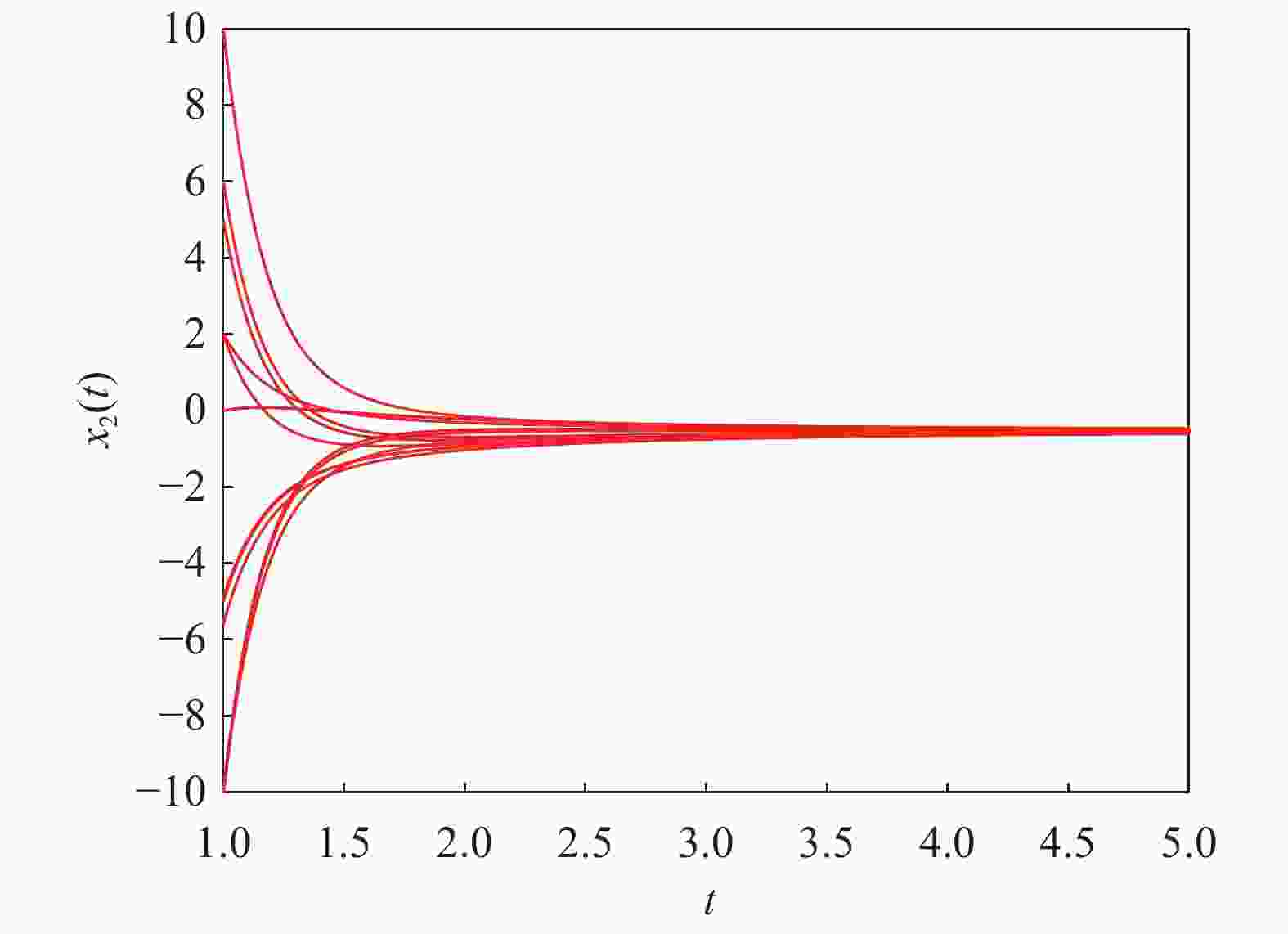
图 8 系统(20)无脉冲时,
${x_2}(t)$ 的时间响应轨线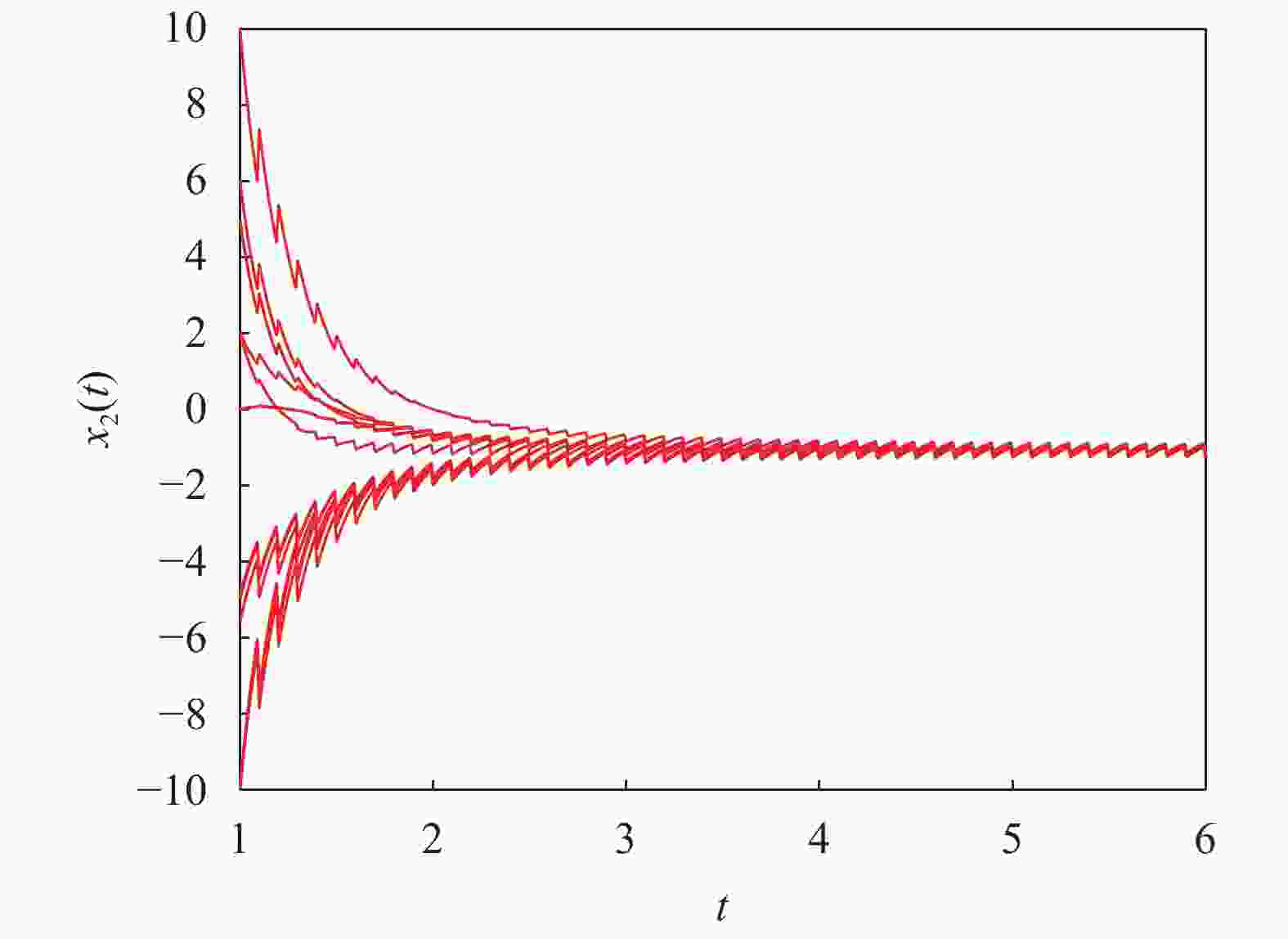
图 9 系统(20)带脉冲时,
${x_2}(t)$ 的时间响应轨线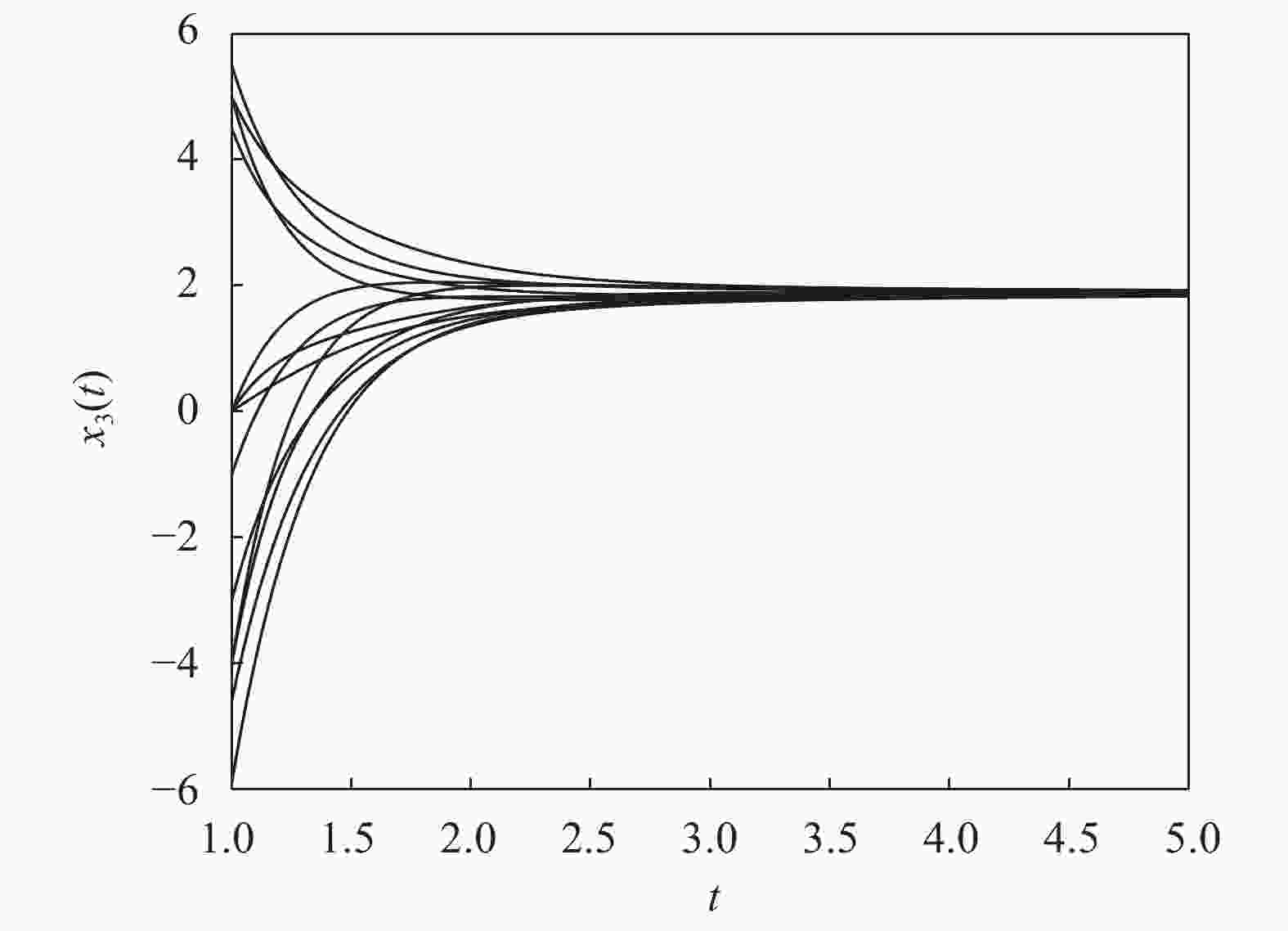
图 10 系统(20)无脉冲时,
${{{x}}_3}(t)$ 的时间响应轨线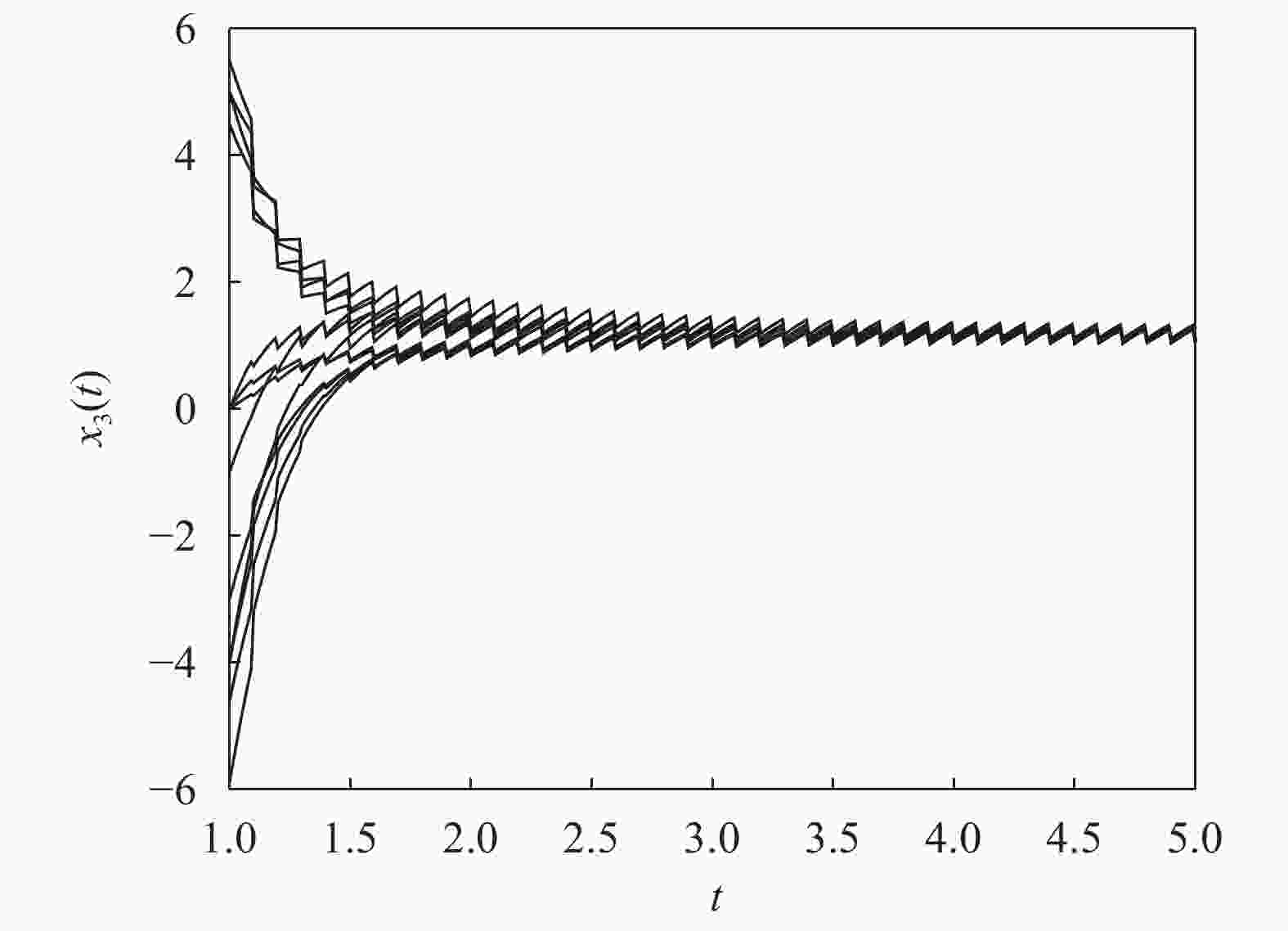
图 11 系统(20)带脉冲时,
${{{x}}_3}(t)$ 的时间响应轨线 -
本文通过构造合适的Lyapunov泛函,研究了一类具比例时滞IRNNs的全局多项式稳定性,所得准则是以LMI形式给出的,便于应用Matlab验证。可调参数的引入使得所得条件的适用范围扩大了。激活函数较广泛,可以是无界的,也可以是不可微的。本文的研究方法也适合于具比例时滞RNNs的多项式周期性、多项式同步性和多项式耗散性等动力学行为的研究。
Global Polynomial Stability of a Class of Impulsive Recurrent Neural Networks with Proportional Delays
-
摘要: 该文对一类具比例时滞脉冲递归神经网络给出全局多项式稳定性定义。通过引入可调参数,构造适合的Lyapunov泛函和运用线性矩阵不等式 (LMI) 的方法,对该系统的全局多项式稳定性进行讨论,得到了保证该系统全局多项式稳定的判定准则,且这些准则以LMI的形式给出的,方便应用Matlab工具箱进行验证。该文还揭示了多项式稳定性与指数稳定性之间的关系,最后通过数值算例验证了所得准则的准确性。
-
关键词:
- 脉冲效应 /
- Lyapunov泛函 /
- 比例时滞 /
- 多项式稳定性 /
- 递归神经网络
Abstract: The definition of global polynomial stability for a class of impulsive recurrent neural networks (IRNNs) with proportional delays is given. By introducing adjustable parameters, several suitable Lyapunov functionals are constructed and the method of linear matrix inequality (LMI) is used to discuss the global polynomial stability of the system. Several criteria for guaranteeing the global polynomial stability of the system are obtained. And these criteria are given in the form of LMI, which is convenient to use Matlab toolbox for verification. The relationship between polynomial stability and exponential stability is revealed. The criteria are verified by numerical examples. -
[1] WU B, LIU Y, LU J. New results on global exponential stability for impulsive cellular neural networks with any bounded time-varying delays[J]. Mathematical and Computer Modeling, 2012, 55(3-4): 837-843. doi: 10.1016/j.mcm.2011.09.009 [2] WANG X, LI C, HUANG T, et al. Global exponential stability of a class of memristive neural networks with time-varying delays[J]. Neural Computing & Applications, 2014, 24(7-8): 1707-1715. [3] LIU X, LIU X, TANG M, et al. Improved exponential stability criterion for neural networks with time-varying delay[J]. Neurocomputing, 2017, 234: 154-163. doi: 10.1016/j.neucom.2016.12.057 [4] ZHANG G, HU J, JIANG F. Show more Exponential stability criteria for delayed second-order memristive neural networks[J]. Neurocomputing, 2018, 315: 439-446. doi: 10.1016/j.neucom.2018.07.037 [5] ZHANG X, HAN Q. Global asymptotic stability analysis for delayed neural networks using a matrix-based quadratic convex approach[J]. Neural Networks, 2014, 54: 57-69. doi: 10.1016/j.neunet.2014.02.012 [6] ALI M S, SARAVANAN S, RANI M E, et al. Asymptotic stability of Cohen-Grossberg BAM neutral type neural networks with distributed time varying delays[J]. Neural Processing Letters, 2017, 46(3): 991-1007. doi: 10.1007/s11063-017-9622-6 [7] WANG L, DING X, LI M. Global asymptotic stability of a class of generalized BAM neural networks with reaction- diffusion terms and mixed time delays[J]. Neurocomputing, 2018, 321: 251-265. doi: 10.1016/j.neucom.2018.09.016 [8] SANTOS M L, ROCHA M P C, GOMES S C. Polynomial stability of a coupled system of wave equations weakly dissipative[J]. Applicable Analysis, 2010, 86(10): 1293-1302. [9] LIU Z, RAO B. Frequency domain approach for the polynomial stability of a system of partially damped wave equations[J]. Journal of Mathematical Analysis and Applications, 2007, 335(2): 860-88115. doi: 10.1016/j.jmaa.2007.02.021 [10] MAO X. Almost sure polynomial stability for a class of stochastic differential equations[J]. Quarterly Journal of Mathematics, 1992, 43(3): 339-348. doi: 10.1093/qmath/43.3.339 [11] ES-SARHIR A, RENESSE M KV, STANNAT W. Estimates for the ergodic measure and polynomial stability of plane stochastic curve shortening flow[J]. Nonlinear Differential Equations and Applications, 2012, 19(6): 663-675. doi: 10.1007/s00030-011-0146-x [12] MILOESVIC M. Existence, uniqueness, almost sure polynomial stability of solution to a class of highly nonlinear pantograph stochastic differential equations and the Euler-Maruyama approximation[J]. Applied Mathematics and Computation, 2014, 237: 672-685. doi: 10.1016/j.amc.2014.03.132 [13] MILOSEVIC M. Convergence and almost sure polynomial stability of the backward and forward–backward Euler methods for highly nonlinear pantograph stochastic differential equations[J]. Mathematics and Computers in Simulation, 2018, 150: 25-48. doi: 10.1016/j.matcom.2018.02.006 [14] LAN G, XIA F, WANG Q. Polynomial stability of exact solution and a numerical method for stochastic differential equations with time-dependent delay[J]. Journal of Computational and Applied Mathematics, 2019, 346: 340-356. doi: 10.1016/j.cam.2018.07.024 [15] 周立群. 具比例时滞递归神经网络的稳定性及其仿真与应用[M]. 北京: 机械工业出版社, 2019. ZHOU Li qun. Stability of recurrent neural networks with proportional delays and its simulations and application [M]. Beijing, Machinery Industry Press, 2019. [16] ZHOU L. On the global dissipativity of a class of cellular neural networks with multi-pantograph delays[J]. Advances in Artificial Neural Systems, 2011, DOI: 10.1155/2011/941426. [17] 周立群. 具比例时滞杂交双向联想记忆神经网络的全局指数稳定性[J]. 电子学报, 2014, 42(1): 96-101. doi: 10.3969/j.issn.0372-2112.2014.01.015 ZHOU Li-qun. Global Exponential stability in hybrid bidirectional associative memory neural networks with proportional delays[J]. Acta Electronica Sinica, 2014, 42(1): 96-101. doi: 10.3969/j.issn.0372-2112.2014.01.015 [18] 周立群. 多比例时滞神经网络的全局一致渐近稳定性[J]. 电子科技大学学报, 2013, 42(4): 625-629. doi: 10.3969/j.issn.1001-0548.2013.04.018 ZHOU Li-qun. Global uniform asymptotic stability of cellular neural networks with mutli-porportional delays[J]. Journal of University of Electronic Science and Technology of China, 2013, 42(4): 625-629. doi: 10.3969/j.issn.1001-0548.2013.04.018 [19] LIU B. Global exponential convergence of non- autonomous cellular neural networks with multi- proportional delays[J]. Neurcomputing, 2016, 191: 352-355. doi: 10.1016/j.neucom.2016.01.046 [20] WANG W, LI L, PENG H, et al. Anti-synchronization control of memristive neural networks with multiple proportional delays[J]. Neural Processing Letters, 2016, 43(1): 269-283. doi: 10.1007/s11063-015-9417-6 [21] LIU B. Global exponential convergence of non- autonomous SICNNs with multi-proportional delays[J]. Neural Computing & Applications, 2017, 28(7): 1927-1931. [22] ZHOU L, ZHANG Y. Global exponential stability of a class of impulsive recurrent neural networks with proportional delays via fixed point theory[J]. Journal of the Franklin Institute, 2016, 353(2): 561-575. doi: 10.1016/j.jfranklin.2015.10.021 [23] ZHOU L, LIU X. Mean-square exponential input-to-state stability of stochastic recurrent neural networks with multi-proportional delays[J]. Neurocomputing, 2017, 219(1): 396-403. [24] ZHOU L. Delay-dependent and delay-independent passivity of a class of recurrent neural networks with impulse and multi-proportional delay[J]. Neurocomputing, 2018, 308: 235-244. doi: 10.1016/j.neucom.2018.04.076 [25] HUANG Z, BIN H, CAO J, et al. Synchronizing neural networks with proportional delays based on a class of q-type allowable time scales[J]. IEEE Transactions on Neural Networks and Learning Systems, 2018, 29(8): 3418-3428. doi: 10.1109/TNNLS.2017.2729588 [26] ZHOU L, ZHAO Z. Exponential synchronization and polynomial synchronization of recurrent neural networks with and without proportional delays[J]. Neurocomputing, 2020, 372(1): 109-116. [27] ZHU Q, CAO J. Robust exponential stability of Markovian jump impulsive stochastic Cohen-Grossberg neural networks with mixed time delays[J]. IEEE Transactions on Neural Networks, 2010, 21(8): 1314-1325. doi: 10.1109/TNN.2010.2054108 [28] LIU Y, HUANG Z, CHEN Z. Alomst periodic solution of impulsive Hopfield neural networks with finite distributed delay[J]. Neural Computing & Applications, 2012, 21(5): 821-831. [29] IVANKA S. Global Mittag-Leffler stability and synchronization of impulsive fractional-order neural networks with time-varying delays[J]. Nonlinear Dynamics, 2014, 77(4): 1251-1260. doi: 10.1007/s11071-014-1375-4 [30] LI H, LI C, HUANG T. Periodicity and stability for variable-time impulsive neural networks[J]. Neural Networks, 2017, 94: 24-33. doi: 10.1016/j.neunet.2017.06.006 [31] HU B, GUAN Z, QIAN T, et al. Dynamic analysis of hybrid impulsive delayed neural networks with uncertainties[J]. IEEE Transactions on Neural Networks and Learning Systems, 2018, 29(9): 4370-4384. doi: 10.1109/TNNLS.2017.2764003 [32] YU T, CAO D. Stability analysis of impulsive neural networks with piecewise constant arguments[J]. Neural Processing Letters, 2018, 47(1): 153-165. doi: 10.1007/s11063-017-9638-y -

 点击查看大图
点击查看大图
图(11)
计量
- 文章访问数: 4830
- HTML全文浏览量: 1496
- PDF下载量: 35
- 被引次数: 0































































































































































































































































