 ISSN
ISSN 


 下载:
下载:






-
近十年,多智能体系统的分布式协同控制问题吸引了学者们的广泛关注,其中,一致性控制在无人机编队、卫星交会、蜂群作战等领域具有广阔的应用前景[1-2]。在实际应用中,智能体的控制输入受到作动器输出能力的限制[3-10],并且通常情况下,难以确保固定的通信拓扑结构[12-14]。这些问题在一致性协同控制的研究中具有重要价值。
本文研究了控制输入受非凸约束且拓扑结构切换条件下,高阶多智能体系统的均方一致性问题。相比文献[3-5]研究的最大值和凸闭集输入约束,非凸约束更有一般性和实用性,其应用场景包括:航天器轨道机动中姿态控制问题[6-7]、车辆系统中的死区约束控制问题 [8]、行星软着陆中的动力下降制导问题[9]等。文献[12-14]研究了固定拓扑结构下的一致性问题,而针对变换拓扑结构的研究较少。
本文提出面向控制输入受约束且拓扑结构Markov切换下的高阶智能体系统的一致性控制算法,通过引入非凸约束算子,根据多智能体系统中邻居节点信息设计系统的控制协议,解决非凸约束问题,并利用辅助矩阵将原系统转化为系统矩阵为Metzler矩阵的等价系统,证明高阶多智能体系统在拓扑结构Markov切换下能够达成均方一致性,从而得到实现均方一致性的充要条件。
针对高阶智能体系统的一致性问题,文献[15-17]提出了一种特定高阶系统的一致性协议,但其未考虑控制输入约束的问题。针对控制输入受非凸约束的问题,文献[18-19]根据凸集上投影的性质来估计约束交点集的距离,得到了多智能体系统一致性的条件。文献[20]证明了只要通信图的并集在一定有界长度的时间间隔内有定向生成树,就可以实现一致性。针对拓扑结构切换的问题,文献[21-22]讨论了具有Markov切换拓扑的异构多智能体系统的一致性问题。文献[22]利用非负矩阵的性质获得了系统均方一致性的条件。但已有考虑了拓扑结构切换问题的文献,针对的对象大多为低阶多智能体系统。因此,受文献[21-22]的启发,本文通过引入非凸约束算子,利用非负矩阵的性质,得到高阶多智能体系统在控制输入受非凸约束且拓扑结构Markov切换条件下的充要均方一致性条件。
本文的贡献如下:1)本文提出控制输入受非凸约束且拓扑结构Markov切换条件下高阶多智能体的一致性算法,在考虑闭环系统随机性的前提下,利用非负矩阵法得到系统一致性时的充要条件,所采用方法广泛适用于任意阶随机多智能体系统,具有低保守型;2)本文所考虑的控制输入约束为非凸约束,相比凸闭集控制输入约束,非凸闭集约束更具一般性。本文研究成果可广泛用于解决风阻条件下的无人机集群或水流条件下无人艇集群等更具实际意义的场景下的跟踪问题。
-
图
$G = (V,E,A)$ 的组成部分包含顶点和连接两个顶点的边,其中,顶点的个数是有限的[23]。为方便描述多智能体系统,采用图中的一个顶点代表一个智能个体,其顶点的集合$V = ({v_1},{v_2}, \cdots ,{v_n})$ ,图中两个顶点存在一条边则表明两个智能体能进行信息交互,图中所有边集由$E = V \times V$ 表示。顶点集V、边集E以及有权邻接矩阵${{A}} = {[{A_{ij}}]_{n \times n}}$ 共同构成了一个有向图(无向图)。对于$\forall i,j = 1,2, \cdots ,n{\text{且}}i \ne j$ ,一般来说,若第i个智能体${v_i}$ 可以直接获取第j个智能体${v_j}$ 的相关信息,那么在图中就有一条由${v_j}$ 指向${v_i}$ 的边,即${e_{ij}} = ({v_i},{v_j}) \in E$ ,且称${v_j}$ 是${v_i}$ 的邻居智能体。特别地,在无向图中,若${v_i}$ 与${v_j}$ 之间有边相互连接,就称两者互为邻居,即,如果${e_{ji}} = ({v_j},{v_i}) \in E$ ,那么${e_{ij}} = ({v_i},{v_j}) \in E$ 。智能体${v_i}$ 的所有邻居由${N_i} = \{ {v_j} \in v: ({v_i},{v_j}) \in E\} $ 表示。当两个智能体之间有信息交互时,则其边的权重大于0,即${e_{ij}} \in E \Leftrightarrow {a_{ij}} > 0$ 。本文的相关研究都是在简单图的基础上展开的,即${a_{ii}} = 0$ 。此外,对于无向图,还满足${a_{ij}} = {a_{ji}}$ 。对于有向图的Laplacian矩阵${{L}}{\rm{ = (}}{l_{ij}}{)_{n \times n}}$ ,可以有如下定义:$${l_{ij}} = \left\{ \begin{aligned} & \sum\limits_{j = 1,j \ne i}^n {{a_{ij}}} {\rm{ }}\quad i \ne j\\ & - {a_{ij}}{\rm{ }}\quad i = j \end{aligned} \right.$$ (1) 而在无向图中,Laplacian矩阵L是对称且半正定的。
-
设
${{{M}}_1} = ({m_{1ij}}) \in {P^{m \times n}},{{{M}}_2} = ({m_{2ij}}) \in {P^{p \times q}}$ ,则:$${{{M}}_1} \otimes {{{M}}_2}{\rm{ = }}\left[ {\begin{array}{*{20}{c}} {{m_{111}}{{{M}}_2}}&{{m_{112}}{{{M}}_2}}& \cdots &{{m_{11n}}{{{M}}_2}} \\ {{m_{121}}{{{M}}_2}}&{{m_{122}}{M_2}}& \cdots &{{m_{12n}}{{{M}}_2}} \\ \vdots & \vdots & \ddots & \vdots \\ {{m_{1m1}}{{{M}}_2}}&{{m_{1m2}}{{{M}}_2}}& \cdots &{{m_{1mn}}{{{M}}_2}} \end{array}} \right]$$ (2) 称为矩阵
${{{M}}_1}$ 与${{{M}}_2}$ 的Kronecker积或者${{{M}}_1}$ 与${{{M}}_2}$ 的直积[24]。 -
如果一个系统矩阵A满足下列条件:
1) 所有非对角元素都为非负数;
2) 所有行和都为0;
那么这个矩阵就被称之为行和为0的Metzler矩阵。如果矩阵A
$ = [{a_{ij}}] \in {R^{m \times n}}$ 的所有元素${a_{ij}}$ 是非负的,那么矩阵A就被称为非负矩阵。如果非负矩阵A满足A1n=1m,则该非负矩阵A就被称为随机矩阵。如果一个随机矩阵${{{B}}_{}} \in {R^{n \times n}}$ 满足${\lim\limits _{m \to \infty }}({{{B}}^m} = {{{\textit{1}}}_n}f)$ ,其中$f \in {R^n}$ ,则该随机矩阵被称为随机不可约非周期矩阵(SIA)。 -
考虑一个由n个l阶智能体组成的系统,其中l是有界常数。假设每个智能体的动态如下:
$$\begin{split} & \xi _i^{(0)}(k + 1) = \xi _i^{(0)}(k) + \xi _i^{(1)}(k)T\\ & \qquad\qquad\qquad\vdots \\ & \xi _i^{(l - 2)}(k + 1) = \xi _i^{(l - 2)}(k) + \xi _i^{(l - 1)}(k)T\\ & \xi _i^{(l - 1)}(k + 1) = \xi _i^{(l - 1)}(k) + {u_i}(k)T \end{split}$$ (3) 式中,
$\xi _i^{(m)}(k),m = 0,1, \cdot \cdot \cdot ,l - 1$ 代表智能体i的各个状态。在实际应用中,像智能机器人、四旋翼等智能体受到的驱动力并不一定是在一个凸集内,因此引入以下假设:
定义1[20] 对一个满足
$0 \in U \in {R^n}$ 的非空有界非凸的闭集合$U$ 有如下定义:$${S_U}({{x}}) = \left\{ \begin{aligned} & \frac{{{x}}}{{\left\| {{x}} \right\|}}{\max _{0 \leqslant \beta \leqslant \left\| {{x}} \right\|}}\left\{ \beta \left| {\frac{{\alpha \beta {{x}}}}{{\left\| {{x}} \right\|}} \in U,\forall 0 \leqslant \alpha \leqslant 1} \right.\right\} \quad {{x}} \ne 0\\ & 0\qquad \;\; {{x}} = 0 \end{aligned} \right.$$ (4) 式中,
${S_U}(\cdot)$ 是集合$U$ 上的一个约束函数;${\max _{{{x}} \in U}}\left\| {{S_U}({{x}})} \right\| = \bar \rho > 0$ ;${\min _{{{x}} \notin U}}\left\| {{S_U}({{x}})} \right\| = \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{\rho } > 0$ ;其中$\,\bar \rho $ 和$\,\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{\rho } $ 是两个非负常数。从定义1可以看出,
$\left\| {{S_U}({{x}})} \right\| \leqslant \left\| {{x}} \right\|$ ,且对于任意$0 \leqslant \alpha \leqslant 1$ ,$\alpha {S_U}({{x}}) \in U $ ,即如图1所示,向量${S_U}({{x}})$ 是闭集内部与向量x同向且长度不大于向量x的最大向量。定义中,${\max _{{{x}} \in U}}\left\| {{S_U}({{x}})} \right\| = \bar \rho > 0$ 意味着集合$U$ 内的任意值到原点的距离都是有界的,而${\min _{{{x}} \notin U}}\left\| {{S_U}({{x}})} \right\| = \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{\rho } > 0$ 表示任意方向上集合外一点到原点的距离都是有下界的。这也就是说,每个智能体均能够向任意方向移动。从物理意义上讲,若所研究多智能体系统为一阶系统,控制输入为智能体速度,则${S_U}({u_i})$ 对智能体在不同方向上速度最大值施加了不同值的约束;如果研究对象为二阶系统,控制输入为智能体的加速度/总受力,则在${S_U}({u_i})$ 约束下,智能体在不同方向上加速度最大值也可能不尽相同。上述现象具有普遍性,例如风阻环境下的无人机、水流环境中的无人艇等。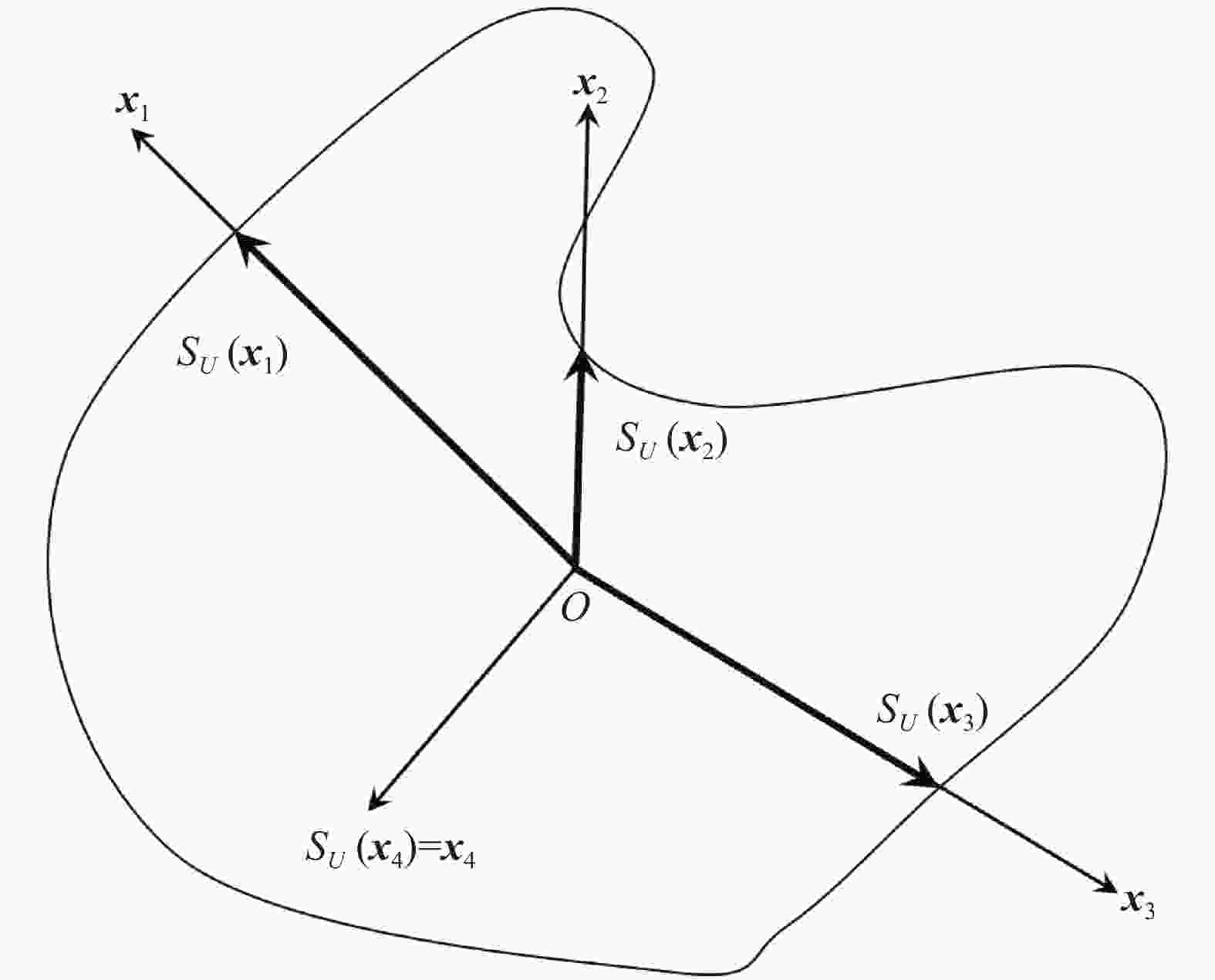
图 1 非凸集合约束示意图
当高阶多智能体系统的通信拓扑结构是Markov切换的,且系统满足以下等式时,则说明系统达到了均方一致性:
$$\mathop {\lim }\limits_{k \to \propto } E[|\xi _i^{(0)} - \xi _j^{(0)}{|^2}] = 0 \quad i,j = 1,2, \cdots ,n$$ (5) 基于定义1,并且将各个智能体的控制输入约束在一个非凸集合内,本节设计了以下控制协议:
$${u_i}(k) = {S_{{U_i}}}{\left( - \sum\limits_{j = 1}^{l - 1} {{p_{ij}}\xi _i^{(j)}(k)} - \sum\limits_{j \in {N_i}(k)} {a_{ij}}(\xi _i^{(0)}(k) - \xi _j^{(0)}(k))\right)} $$ (6) 式中,
${p_{ij}}$ >0是控制参数;${N_i}(k)$ 是智能体i的所有邻居的集合。令:
$$ \begin{split} & \quad\quad\quad\quad\quad\quad\quad\quad\quad\quad\quad{z_i}(k) = \\ & \frac{{\left\| {{S_{{U_i}}}{\left( - \displaystyle\sum\limits_{j = 1}^{l - 1} {{p_{ij}}\xi _i^{(j)}(k)} - \displaystyle\sum\limits_{j \in {N_i}(k)} {a_{ij}}(k)(\xi _i^{(0)}(k) - \xi _j^{(0)}(k))\right)} } \right\|}}{{\left\| { - \displaystyle\sum\limits_{j = 1}^{l - 1} {{p_{ij}}\xi _i^{(j)}(k)} - \displaystyle\sum\limits_{j \in {N_i}(k)} {{a_{ij}}(k)(\xi _i^{(0)}(k) - \xi _j^{(0)}(k))} } \right\|}} \end{split} $$ (7) 控制协议式(5)可以转换为如下形式:
$$ \begin{split} & {u_i}(k) = {z_i}(k)\left( - \sum\limits_{j = 1}^{l - 1} {{p_{ij}}\xi _i^{(j)}(k)} -\right.\\ &\left. \sum\limits_{j \in {N_i}(k)} {{a_{ij}}(k)(\xi _i^{(0)}(k) - \xi _j^{(0)}(k)}) \right) \end{split} $$ (8) 令
${\xi _i}(k) = {[\xi _i^{(0)},\xi _i^{(1)}, \cdots ,\xi _i^{(l - 1)}]^{\rm{T}}}$ ,$\xi (k) = {[\xi _1^{\rm{T}},\xi _2^{\rm{T}}, \cdots ,}$ $\xi _n^{\rm{T}}]^{\rm{T}} $ ,则n个l阶的智能体的闭环方程如下:$$\xi (k + 1) = [{{A}} - {{Z}}(k){{{L}}^{\delta (k)}}(k) \otimes {{B}}]\xi (k)$$ (9) 式中,
${{{L}}^{\delta (k)}}$ 表示系统的通信拓扑图处于$\delta (k)$ 状态时的Laplacian矩阵;${{A}} = {\rm{dia}}g\{ {{{A}}_1}(k),{{{A}}_2}(k), \cdot \cdot \cdot ,{{{A}}_n}(k)\} $ ;${{{A}} _i}(k) = \left( \!\!\!\!\!\!\!\!\!\!\!\!{\begin{array}{*{20}{c}} {\begin{array}{*{20}{c}} {\begin{array}{*{20}{c}} {\begin{array}{*{20}{c}} \!\!\!\!\!\! 1 \!\!\!\!\!\!\!\!\\ \!\!\!\!\!\! 0 \!\!\!\!\!\!\!\!\end{array}} \\ \!\!\!\!\!\! 0 \!\!\!\!\!\!\!\! \end{array}} \\ \!\!\!\!\!\! \vdots \!\!\!\!\!\!\!\! \\ \!\!\!\!\!\! 0 \!\!\!\!\!\!\!\! \\ \!\!\!\!\!\! 0 \!\!\!\!\!\!\!\!\end{array}}&{\begin{array}{*{20}{c}} {\begin{array}{*{20}{c}} \!\!\!\!\!\! T\!\!\!\! \\ \!\!\!\!\!\! 1\!\!\!\! \\ \!\!\!\!\!\! 0 \!\!\!\!\end{array}} \\ \!\!\!\!\!\! \vdots\!\!\!\! \\ \!\!\!\!\!\! 0\!\!\!\! \\ \!\!\!\!\!\! { - {z_i}{p_{i1}}T} \!\!\!\!\end{array}}&{\begin{array}{*{20}{c}} {\begin{array}{*{20}{c}}\!\!\!\!\!\! 0\!\!\!\! \\ \!\!\!\!\!\! T\!\!\!\! \\ \!\!\!\!\!\! 1 \!\!\!\!\end{array}} \\ \!\!\!\!\!\! \vdots \!\!\!\! \\ \!\!\!\!\!\! 0 \!\!\!\!\\ \!\!\!\!\!\! { - {z_i}{p_{i2}}T} \!\!\!\!\end{array}}&{\begin{array}{*{20}{c}} {\begin{array}{*{20}{c}}\!\!\!\!\!\! \cdots \!\!\!\! \\ \!\!\!\!\!\!\cdots \!\!\!\! \\ \!\! \!\!\!\! \cdots\!\!\!\! \end{array}} \\ \!\! \!\!\!\!\ddots\!\!\!\! \\ \!\!\!\!\!\! \cdots \!\!\!\!\\ \!\! \!\!\!\!\cdots \!\!\!\!\end{array}}&{\begin{array}{*{20}{c}} {\begin{array}{*{20}{c}}\!\! \!\!\!\! 0\!\!\!\! \\ \!\! \!\!\!\! 0\!\!\!\! \\ \!\!\!\!\!\!0 \!\!\!\!\end{array}} \\ \!\!\!\!\!\! \vdots \!\!\!\! \\ \!\!\!\! \!\! T \!\!\!\!\\ \!\!\!\!\!\! { - {z_i}{p_{i(m - 1)}}T} \!\!\!\!\end{array}} \end{array}} \!\!\!\!\!\!\right) \in {R^{l \times l}}\,\text{;}$ ${{Z}} (k) = \left[ {\begin{array}{*{20}{c}} \!\!\!\! {{z_1}} \!\!\!\!&{}&{}&{} \\ \!\!\!\! {} \!\!\!\!& \!\!\!\!{{z_2}} \!\!\!\!&{}&{} \\ {}&{}& \!\!\!\!\ddots \!\!\!\! &{} \\ {}&{}&{} \!\!\!\!& \!\!\!\!{{z_n}} \end{array}} \right]$ ;以及${{B}} = \left[ {\begin{array}{*{20}{c}} 0&0& \cdots &0 \\ 0&0& \cdots &0 \\ \vdots & \vdots & \ddots & \vdots \\ T&0& \cdots &0 \end{array}} \right] \in {R^{l \times l}}$ 。 -
本节研究了Markov切换拓扑下,多智能体系统控制输入受约束时的均方一致性问题。首先引入以下转换矩阵对高阶系统式(9)进行模型转换:
定义2
$\varGamma = \left( {\begin{array}{*{20}{c}} 1&0&0& \cdots &0 \\ 1&{{H_1}}&0& \cdots &0 \\ 1&{\displaystyle\sum\limits_{{j_0} = 1}^2 {{H_{{j_0}}}} }&{{H_1}{H_2}}& \cdots &0 \\ \vdots & \vdots & \vdots & \ddots &0 \\ 1 & {\displaystyle\sum\limits_{{j_0} = 1}^{m - 1} {{H_{{j_0}}}} } & {\displaystyle\sum\limits_{{j_0} = 1}^{m - 2} {\prod\limits_{{j_1} = {j_0} + 1}^{m - 1} {{H_{{j_0}{j_1}}}} } } & \cdots &{\displaystyle\prod\limits_{{j_0} = 1}^{m - 1} {{H_{{j_0}}}} } \end{array}} \right) \in {R^{l \times l}}$ 且${{{Y}}_i}(k) = \varGamma {\xi _i}(k)$ ,则:$${{Y}}(k + 1) = [{{C}} - E(k){{{L}}^{\delta (k)}}(k) \otimes {{D}}]{{Y}}(k)$$ (10) 式中,
${{C}} \!=\! {\rm{diag}}\{ {{{C}}_1}(k),{{{C}}_2}(k), \cdots ,{{{C}}_n}(k)\};{{D}}\! =\! {{B}}\displaystyle\prod\limits_{m = 1}^{l - 1} {{H_m}}$ ;${{{C}}_i} = \left[ {\begin{array}{*{20}{c}} {1 - \dfrac{T}{{{H_1}}}}\!\!\!\!&\!\!\!\!{\dfrac{T}{{{H_1}}}}\!\!\!\!&0&\cdots&0&0 \\ 0\!\!\!\!&\!\!\!\!{1 - \dfrac{T}{{{H_2}}}}\!\!\!\!&\!\!\!\!{\dfrac{T}{{{H_2}}}}& \cdots &0&0 \\ \vdots \!\!\!\!&\!\!\!\! \vdots \!\!\!\!& \vdots & \ddots & \vdots & \vdots \\ 0 &0 &0 & \cdots & {1 - \dfrac{T}{{{H_{m - 1}}}}} & {\dfrac{T}{{{H_{m - 1}}}}} \\ {{a_{i1}}} & {{a_{i2}}} & {{a_{i3}}} & \cdots &{{a_{i,m - 1}}} & {{a_{il}} + 1} \end{array}} \right] \in {R^{l \times l}}$ 令${\varPhi _{\delta (k)}}(k) \!= \!{{C}}\! -\! {{Z}}(k){{{L}}^{\delta (k)}}(k)\! \otimes\! {{D}}$ ,则转换后的闭环方程为:$${{Y}}(k + 1) = {\varPhi _{\delta (k)}}(k){{Y}}(k)$$ (11) 假设1:对任意的
$i = 1,2, \cdots ,n$ ,以下不等式均成立:$$\begin{aligned} & {H_m} > T\quad{a_{i1}} > {d_{\max }}T\prod\limits_{n = 1}^{l - 1} {{H_n}} \quad{a_{im}} > 0\\ &\quad\quad 1 + {a_{il}} > 0 \quad m = 1,2, \cdots ,l \end{aligned}$$ 假设2:设系统式(3)的联合通信拓扑结构
${G_1},{G_2}, \cdots ,{G_n}$ 有生成树,其中$S = \{ 1,2, \cdots ,s\} $ 为马尔科夫链${\varPhi _{\delta (k)}}(k)$ 的状态空间。引理 1[11] 设
$F = \{ {p_1},{p_2}, \cdots ,{p_n}\} $ 是有限个n阶SIA矩阵的集合,若对任意的$j \in {Z^ + },{p_{i1}},{p_{i2}}, \cdots ,{p_{ij}} \in F$ ,有${p_{i1}},{p_{i2}}, \cdots ,{p_{ij}}$ 仍是SIA矩阵,则对于无穷矩阵序列${p_{ik}} \in F$ 存在一个常数$c \in {R^n}$ 使得$\mathop {\lim }\limits_{j \to \infty } {p_{i1}}{p_{i2}} \cdots {p_{ij}} = {{{\textit{1}}}_n}{{{c}}^{\rm{T}}}$ 。引理 2[21] 设
${{A}} \in {R^{n \times n}}$ 是随机矩阵,若$\lambda = 1$ 是代数重数为1的特征值,且满足其他特征值的模长均小于1,则矩阵A是SIA矩阵。引理 3[20] 在式(11)下,系统矩阵
${{{\varPhi}} _{\delta (k)}}(k)$ 是随机矩阵。引理 4[22] 若马氏链条
$\{ \delta (k)\} $ 是遍历的并且其状态空间为$S = \{ 1,2, \cdots ,s\} $ ,则一定存在一个正整数r使得对于$i,j \in S$ ,存在${i_1},{i_2}, \cdots ,{i_{r - 1}} \in S$ 且$\{ {i_1},{i_2}, \cdots ,{i_{r - 1}}\} = S$ ,有${p_{j{i_1}}}{p_{{i_1}{i_2}}} \cdots {p_{{i_{r - 1}}i}} > 0$ 。引理 5 设
$\{ \delta (k)\} $ 是状态空间$S = \{ 1,2, \cdots ,s\} $ 的有限状态遍历的齐次马氏链条,r为引理4中的正整数使得$\mathop {\lim }\limits_{t \to \infty } \dfrac{1}{{p_{ji}^{(r)}}}{[W(k + r),k]_{ij}} = {{{\textit{1}}}_n}{{c}}_{i{j_{}}}^{\rm{T}}$ 是随机矩阵,其中:$$\begin{split} & {[W(k + r),k]_{ij}} = \sum\limits_{{1 \leqslant {j_1}} ,{j_2}, \cdots ,{j_{tr - 1}} \leqslant s}{P_{j{j_1}}}{P_{{j_1}{j_2}}}{P_{{j_{r - 1}}i}}\times\\ &\qquad\; [{\varPhi _j}(k){\varPhi _{{j_1}}}(k + 1) \cdots {\varPhi _{{j_{r - 1}}}}(k + r - 1)] \otimes \\ &\quad\quad [{\varPhi _j}(k){\varPhi _{{j_1}}}(k + 1) \cdots {\varPhi _{{j_{r - 1}}}}(k + tr - 1)] \end{split}$$ 证明:由引理4可知,
$$P_{ji}^{(r)} = \sum{ {1 \leqslant {j_1}} ,{j_2}, \cdots, {j_{tr - 1}} \leqslant s}{P_{j{j_1}}}{P_{{j_1}{j_2}}}{P_{{j_{r - 1}}i}} > 0,$$ 并且显而易见
${[W(k + r),k]_{ij}}1 = 1$ ,即其行和为1,并且由Kronecker积的特性,其元素都大于0,所以,$\dfrac{1}{{p_{ji}^{(r)}}}{[W(k + r),k]_{ij}}$ 是随机矩阵。引理 6 根据引理1以及引理5,存在:
$${c_{ij}} \in {R^{{n^2}}}\qquad\; i,j \in S,$$ 对任意的
$k > 0$ ,$\mathop {\lim }\limits_{t \to \infty } \dfrac{1}{{p_{ji}^{(r)}}}{[W(k + r),k]_{ij}} = {{{\textit{1}}}_n}{{c}}_{i{j_{}}}^{\rm{T}}$ ,其中:$$\begin{split} & {[W(k + r),k]_{ij}} = \sum\limits_{ {1 \leqslant {j_1},{j_2}, \cdots, {j_{tr - 1}} \leqslant s}} {P_{j{j_1}}}{P_{{j_1}{j_2}}}{P_{{j_{r - 1}}i}}\times\\ &\qquad\; [{\varPhi _j}(k){\varPhi _{{j_1}}}(k + 1) \cdots {\varPhi _{{j_{r - 1}}}}(k + tr - 1)] \otimes \\ & \quad\quad\; [{\varPhi _j}(k){\varPhi _{{j_1}}}(k + 1) \cdots {\varPhi _{{j_{r - 1}}}}(k + tr - 1)] \end{split}$$ 定理 1 对于高阶离散多智能体系统式(3),
${\varPhi _{\delta (k)}}(k)$ 是状态空间为$S = \{ 1,2, \cdots ,s\} $ 的齐次马氏链,那么当智能体的联合通信拓扑图包含生成树时,控制协议式(6)能够解决多智能体系统的均方一致性,并且所有的控制输入都约束在非凸集合内。证明:定义
${{{V}}_i}(k) = {{E}}[{{Y}}(k + 1){{{Y}}^{\rm{T}}}(k + 1){1_{\{ \delta (k + 1 = i)\} }}]$ ,${{V}}(k) = {{E}}[{{Y}}(k + 1){{{Y}}^{\rm{T}}}(k + 1)] = \displaystyle\sum\limits_{i = 1}^S {{{{V}}_i}(k)} $ ,其中${1_{\{ \delta (k + 1 = i)\} }}$ 是事件$\{ \delta (k + 1 = i)\} $ 的示性函数,根据期望的性质,有:$$\begin{split} &\qquad\quad {{{V}}_i}(k) = {{E}}[{{Y}}(k + 1){{{Y}}^{\rm{T}}}(k + 1){1_{\{ \delta (k + 1 = i)\} }}]=\\ &\qquad\quad\quad \sum\limits_{j = 1}^S {{E}} [{\varPhi _{\delta (k)}}(k){{Y}}(k){{{Y}}^{\rm{T}}}(k)\varPhi _{\delta (k)}^{\rm{T}}(k)\times\\ & \qquad\quad\quad{1_{\{ \delta (k + 1 = i)\} }}|\delta (k) = j]p(\delta (k) = j)=\\ & \quad\quad \sum\limits_{j = 1}^S {{{E}}[{\varPhi _{\delta (k)}}(k)Y(k){Y^{\rm{T}}}(k)\varPhi _j^{\rm{T}}(k)|\delta (k) = j]} \times\\ &\qquad\quad {{E}}[{1_{\{ \delta (k + 1 = i)\} }}|\delta (k) = j]p(\delta (k) = j)=\\ & \sum\limits_{j = 1}^S {{\varPhi _j}(k){{E}}[Y(k){Y^{\rm{T}}}(k)|\delta (k) = j] p\{ \delta (k) = j\} } \varPhi _j^{\rm{T}}(k){p_{ji}}=\\ & \quad\quad \sum\limits_{j = 1}^S {{p_{ji}}{\varPhi _j}(k){{E}}[Y(k){{{Y}}^{\rm{T}}}(k)|{1_{\{ \delta (k + 1 = i)\} }}]} \varPhi _j^{\rm{T}}(k)=\\ & \qquad\quad\quad\quad \sum\limits_{j = 1}^S {{p_{ji}}{\varPhi _j}(k)} {{{V}}_j}(k)\varPhi _j^{\rm{T}}(k) \end{split}$$ 令
$\psi (k) = {\rm{col}}\{ {{{V}}_1}(k),{{{V}}_2}(k), \cdots, {{{V}}_s}(k)\}$ ,也就是将矩阵${{{V}}_1}(k),{{{V}}_2}(k), \cdots, {{{V}}_s}(k)$ 的列向量按照顺序组成一个列向量,那么:$$\psi (k + 1) = \varLambda (k)\psi (k)$$ 式中,
$$\begin{array}{l} \varLambda (k) = \left[ {\begin{array}{*{20}{c}} {\begin{array}{*{20}{c}} {{\varLambda _{11}}(k)}\\ {{\varLambda _{21}}(k)}\\ \vdots \\ {{\varLambda _{s1}}(k)} \end{array}}&{\begin{array}{*{20}{c}} {{\varLambda _{12}}(k)}\\ {{\varLambda _{22}}(k)}\\ \vdots \\ {{\varLambda _{s2}}(k)} \end{array}}&{\begin{array}{*{20}{c}} \cdots \\ \cdots \\ {\rm{}} \\ \cdots \end{array}}&{\begin{array}{*{20}{c}} {{\varLambda _{1s}}(k)}\\ {{\varLambda _{2s}}(k)}\\ \vdots \\ {{\varLambda _{ss}}(k)} \end{array}} \end{array}} \right]= \\ {\rm{}}\\ \left[\!\!\!\! {\begin{array}{*{20}{c}} {\begin{array}{*{20}{c}} {{P_{11}}{\varPhi _1} \otimes {\varPhi _1}}\\ {{P_{21}}{\varPhi _1} \otimes {\varPhi _1}}\\ \vdots \\ {{P_{s1}}{\varPhi _1} \otimes {\varPhi _1}} \end{array}}&{\begin{array}{*{20}{c}} {{P_{12}}{\varPhi _2} \otimes {\varPhi _2}}\\ {{P_{22}}{\varPhi _2} \otimes {\varPhi _2}}\\ \vdots \\ {{P_{s2}}{\varPhi _2} \otimes {\varPhi _2}} \end{array}}&{\begin{array}{*{20}{c}} \cdots \\ \cdots \\ \\ \cdots \end{array}}&{\begin{array}{*{20}{c}} {{P_{1s}}{\varPhi _s} \otimes {\varPhi _s}}\\ {{P_{2s}}{\varPhi _s} \otimes {\varPhi _s}}\\ \vdots \\ {{P_{ss}}{\varPhi _s} \otimes {\varPhi _s}} \end{array}} \end{array}} \!\!\!\!\right] \end{array}$$ 取
${{{V}}_{\rm{i}}}(0) = {q_i}{{Y}}({\rm{0}}){{{Y}}^{\rm{T}}}\left( 0 \right)$ ,其中$[{q_1},{q_2}, \cdots {q_s}]$ 为马尔科夫链${\varPhi _{\delta (k)}}(k)$ 的初始分布,从引理6可得:$$\mathop {\lim }\limits_{t \to \infty } \frac{1}{{p_{ji}^{(r)}}}{[W(k + r),k]_{ij}} = {{{\textit{1}}}_n}{{c}}_{i{j_{}}}^{\rm{T}}$$ 式中,
${[W(k + r),k]_{ij}}$ 对应于矩阵$\varLambda (k)\varLambda (k + 1) \cdots$ $ \varLambda (k + {{tr}} - 1)$ 中的第(i,j)个元素。因此,对于任意k>0,$\mathop {\lim }\limits_{t \to \infty } \dfrac{1}{{p_{ji}^{(r)}}}{[W(k + r),k]_{ij}} = { \pi _i}{{{\textit{1}}}_n}{{c}}_{i{j_{}}}^{\rm{T}}$ ,其中${ \pi _1},{ \pi _2}, \cdots { \pi _s}$ 是马尔科夫链${\varPhi _{\delta (k)}}(k)$ 的绝对分布。则:$$\begin{aligned} &\qquad\;\; \mathop { \lim }\limits_{ t \to \infty } \varLambda (0)\varLambda (1) \cdots \varLambda (tr - 1) = \\ & \left[ {\begin{array}{*{20}{c}} {{ \pi _1}{{{\textit{1}}}_n}{{c}}_{11}^{\rm{T}}}&{{ \pi _1}{{{\textit{1}}}_n}{{c}}_{12}^{\rm{T}}}& \cdots &{{ \pi _1}{{{\textit{1}}}_n}{{c}}_{1s}^{\rm{T}}}\\ {{ \pi _2}{{{\textit{1}}}_n}{{c}}_{21}^{\rm{T}}}&{{ \pi _2}{{{\textit{1}}}_n}{{c}}_{22}^{\rm{T}}}& \cdots &{{ \pi _2}{{{\textit{1}}}_n}{{c}}_{2s}^{\rm{T}}}\\ \vdots & \vdots & \ddots & \vdots \\ {{ \pi _s}{{{\textit{1}}}_n}{{c}}_{s1}^{\rm{T}}}&{{ \pi _s}{{{\textit{1}}}_n}{{c}}_{s2}^{\rm{T}}}& \cdots &{{ \pi _s}{{{\textit{1}}}_n}{{c}}_{ss}^{\rm{T}}} \end{array}} \right] \end{aligned}$$ 因此,
$$\mathop {\lim }\limits_{t \to \infty } \psi (rt) = {\left[ {\begin{array}{*{20}{c}} {{\alpha _1}{{{\textit{1}}}_n}}&{{\alpha _2}{{{\textit{1}}}_n}}& \cdots &{{\alpha _s}{{{\textit{1}}}_n}} \end{array}} \right]^{\rm{T}}}$$ 式中,
${\alpha _i} = { {\pi}_i}\displaystyle\sum\limits_{j = 1}^S {({{c}}_{ij}^{\rm{T}}{\psi _j}(0))} ,i = 1,2, \cdots ,s$ ,即$\mathop {\lim }\limits_{t \to \infty } {{{V}}_i}(rt) = {\alpha _i}{{{\textit{1}}}_n}{{\textit{1}}}_n^{\rm{T}},\beta = \displaystyle\sum\limits_{j = 1}^S {{\alpha _i}} $ 。对于任意的
$k \in {Z^ + }$ ,取满足$rt < k$ 的最大整数r,可以得到:$$\begin{aligned} & \quad {{E}}[{{Y}}(k){{{Y}}^{\rm{T}}}(k)] = {{E}}[{\varPhi _{\delta (k)}}(k) \cdots {\varPhi _{{i_{rt + 1}}}}(rt + 1)(rt + 1)\times\\ &\quad \quad \quad {{Y}}(rt){{{Y}}^{\rm{T}}}(rt) \varPhi _{\delta (rt + 1)}^{\rm{T}}(rt + 1) \cdots \varPhi _{\delta (k)}^{\rm{T}}(k)]\\ &\quad \quad \quad \quad {{E}}[{\varPhi _{{i_k}}}(k) \cdots {\varPhi _{{i_{rt + 1}}}}(rt + 1)(rt + 1) ]=\\ & \sum\limits_{0 \leqslant {i_k}, \cdots, {i_{rt + 1}} \leqslant s} {{Y}}(rt){{{Y}}^{\rm{T}}}(rt)\varPhi _{\delta (rt + 1)}^{\rm{T}}(rt + 1) \cdots \varPhi _{{i_k}}^{\rm{T}}(k)] \\ &\quad \quad \quad \quad \quad P\{ \delta (k) = {i_k}, \cdots ,\delta (k) = {i_{rt + 1}}\} = \\ &\quad \quad \quad \sum\limits_{0 \leqslant {i_k}, \cdots, {i_{rt + 1}} \leqslant s} {{\varPhi _{{i_k}}}(k) \cdots {\varPhi _{{i_{rt + 1}}}}(rt + 1)} \\ & \quad \quad {{E}}[{{Y}}(rt){{{Y}}^{\rm{T}}}(rt)]\varPhi _{\delta (rt + 1)}^{\rm{T}}(rt + 1) \cdots \varPhi _{{i_k}}^{\rm{T}}(k) \end{aligned}$$ 由于
${\varPhi _{{i_k}}}(k) \cdots {\varPhi _{{i_{rt + 1}}}}(rt + 1)(\beta {{{\textit{1}}}_n}{{\textit{1}}}_n^{\rm{T}})\varPhi _{\delta (rt + 1)}^{\rm{T}}(rt + 1) \cdots $ $\varPhi _{{i_k}}^{\rm{T}}(k) = \beta {{{\textit{1}}}_n}{{\textit{1}}}_n^{\rm{T}}$ ,所以:$$\mathop {\lim }\limits_{k \to \infty } {{E}}[{{Y}}(rt){{{Y}}^{\rm{T}}}(rt)] = \beta {{{\textit{1}}}_n}{{\textit{1}}}_n^{\rm{T}}$$ 令
$\varepsilon (k) = {{Y}}(k) - {{{\textit{1}}}_{nl}}\dfrac{{{\textit{1}}}}{{nl}}\displaystyle\sum\limits_{j = 1}^{nl} {{{{Y}}_j}(k)} =\left ({I_{nl}} - \dfrac{{{{{\textit{1}}}_{nl}}{{\textit{1}}}_{nl}^{\rm{T}}}}{{{{\textit{1}}}_{nl}^T{{{\textit{1}}}_{nl}}}}\right){{Y}}(k)$ 则:$${{E}}[\varepsilon (k){\varepsilon ^{\rm{T}}}(k)] = \left({{{I}}_{nl}} - \frac{{{{{\textit{1}}}_{nl}}{{\textit{1}}}_{nl}^{\rm{T}}}}{{{{\textit{1}}}_{nl}^{\rm{T}}{{{\textit{1}}}_{nl}}}}\right){{E}}[{{Y}}(k){{{Y}}^{\rm{T}}}(k)]\left({{{I}}_{nl}} - \frac{{{{{\textit{1}}}_{nl}}{{\textit{1}}}_{nl}^{\rm{T}}}}{{{{\textit{1}}}_{nl}^{\rm{T}}{{{\textit{1}}}_{nl}}}}\right)$$ 因此:
$$\begin{aligned} &\qquad\quad\quad\;\; \mathop {\lim }\limits_{k \to \infty } {{E}}[\varepsilon (k){\varepsilon ^{\rm{T}}}(k)]=\\ & \left({{{I}}_{nl}} - \frac{{{{{\textit{1}}}_{nl}}{{\textit{1}}}_{nl}^{\rm{T}}}}{{{{\textit{1}}}_{nl}^{\rm{T}}{{{\textit{1}}}_{nl}}}}\right)\mathop {\lim }\limits_{k \to \infty } {{E}}[{{Y}}(k){{{Y}}^{\rm{T}}}(k)]\left({{{I}}_{nl}} - \frac{{{{{\textit{1}}}_{nl}}{{\textit{1}}}_{nl}^{\rm{T}}}}{{{{\textit{1}}}_{nl}^{\rm{T}}{{{\textit{1}}}_{nl}}}}\right)=\\ & \quad\;\; \left({{{I}}_{nl}} - \frac{{{{{\textit{1}}}_{nl}}{{\textit{1}}}_{nl}^{\rm{T}}}}{{{{\textit{1}}}_{nl}^{\rm{T}}{{{\textit{1}}}_{nl}}}}\right)\beta {{{\textit{1}}}_n}{{\textit{1}}}_n^{\rm{T}}\left({{{I}}_{nl}} - \frac{{{{{\textit{1}}}_{nl}}{{\textit{1}}}_{nl}^{\rm{T}}}}{{{{\textit{1}}}_{nl}^{\rm{T}}{{{\textit{1}}}_{nl}}}}\right) = 0 \end{aligned}$$ 而
$\mathop {\lim }\limits_{k \to \infty } {{E}}[\varepsilon (k){\varepsilon ^{\rm{T}}}(k)] = \mathop {\lim }\limits_{k \to \infty } {{tr}}{{E}}[\varepsilon (k){\varepsilon ^{\rm{T}}}(k)]$ ,也即:$$\mathop {\lim }\limits_{k \to \infty } {{E}}\left[ {{{\left\| {\left. {{{Y}}(k) - {{{I}}_{nl}}\frac{1}{{nl}}\sum\limits_{j = 1}^{nl} {{{{Y}}_j}(k)} } \right\|} \right.}^2}} \right] = 0$$ 可以得到:
$$\mathop {\lim }\limits_{k \to \infty } {{E}}\left[ {{{\left\| {\left. {{{Y}}(k) - {{{I}}_{nl}}\frac{1}{{nl}}\sum\limits_{j = 1}^{nl} {{{{Y}}_j}(k)} } \right\|} \right.}^2}} \right] = 0 \quad \forall i,j = 1,2, \cdots, n$$ 利用
${[\xi _i^{(0)},\xi _i^{(1)}, \cdots ,\xi _i^{(l - 1)}]^{\rm{T}}} = {\varGamma ^{ - 1}}{{{Y}}_i}(k)$ ,可以得到:$$\mathop {\lim }\limits_{k \to \infty } {{E}}\left[ {{{\left| {\xi _i^{(0)} - \xi _j^{(0)}} \right|}^2}} \right] = 0 \quad i \ne j\quad i,j = 1,2, \cdots, n$$ 即多智能体系统式(3)在控制协议式(5)下达到了均方一致性。
与文献[20]相比,本文所考虑的拓扑结构Markov切换和闭环系统随机性在实际应用中具有一定的应用价值。与文献[21-22]相比,本文将应用对象拓展到高阶多智能体系统,使得本方法在实际应用中更具有普适性。
-
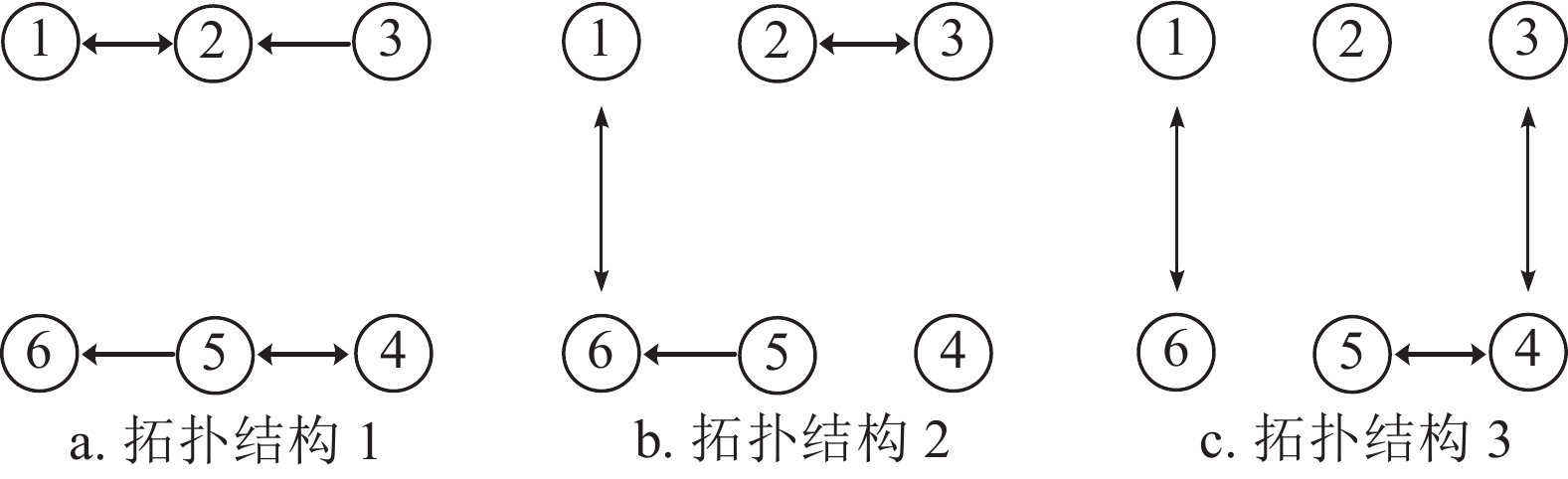
本节通过Matlab数值仿真,说明高阶多智能体系统能够在控制输入受约束且拓扑结构Markov切换的条件下,通过控制协议式(5)实现均方一致性。假设系统式(3)中有6个异构的三阶智能体,依次编号为1, 2, 3, 4, 5, 6。图2描述了多智能体系统随机变化的3个通信拓扑图,定义每个拓扑图中边的权重为0.5,且假定通信拓扑图每0.1 s就变化1次。
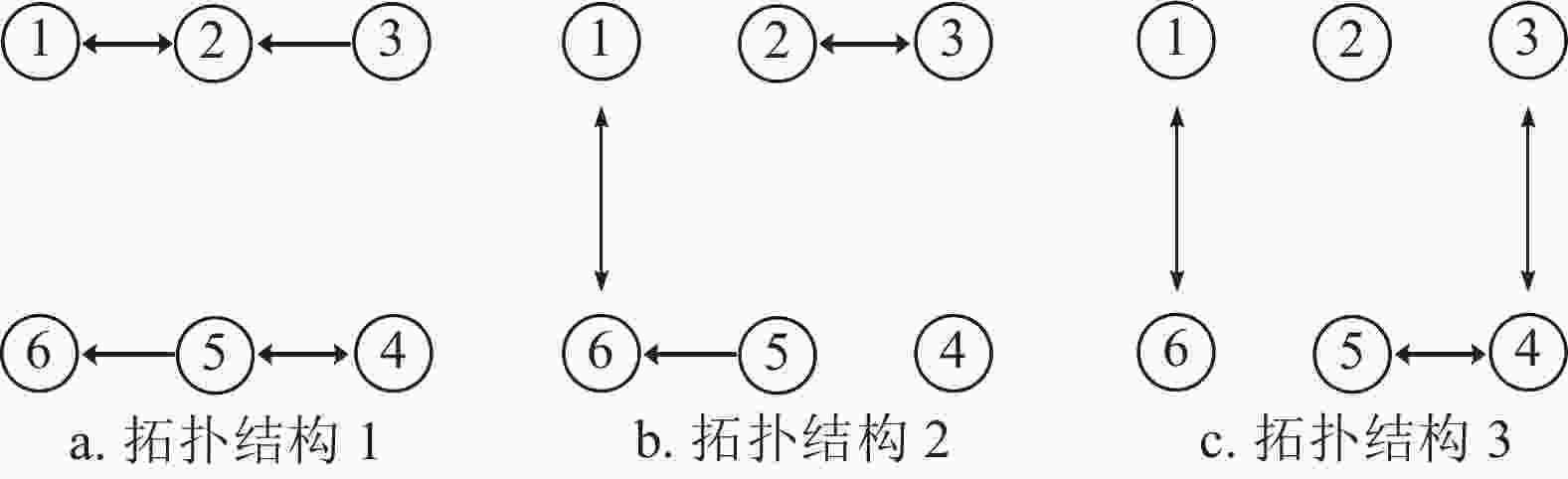
图 2 多智能体系统的3个通信拓扑图
假设每个智能体的控制输入约束在以下非凸集合内:
$$\begin{split} &\quad\;\; {U_i} = \{ {{x}} \in {R^2}\left| {\left\| {{x}} \right\|} \right. \leqslant 1, - 1 \leqslant [0,1]{{x}} \leqslant 0\} \cup \\ & \{ {{x}} \in {R^2}\left| { - 0.5 \leqslant [1,0]{{x}} \leqslant 0.5,0 \leqslant [0,1]{{x}} \leqslant 1} \right.\} \end{split}$$ 为了满足定义1所提出的条件,需要选择合适的控制输入初始参数。控制输入中参数的初值需要在考虑拓扑结构和连接权重值的前提下,选择满足假设1中的不等式条件的数值。
本文仿真中针对的是三阶智能体系统,令
${z_i} = 1$ ,则多智能体系统的Laplacian矩阵为:$${{{A}}_i}(k) = \left[ {\begin{array}{*{20}{c}} 1&T&0 \\ 0&1&T \\ 0&{ - {p_{i1}}T}&{ - {z_i}{p_{i2}}T} \end{array}} \right]\quad i = 1,2,\cdots,6$$ 令
${H_1} = {H_2} = 1$ ,则转换矩阵为:$${{\varGamma}} = \left[ {\begin{array}{*{20}{c}} 1&0&0 \\ 1&1&0 \\ 1&2&1 \end{array}} \right]$$ 进一步可得,式(10)中的矩阵
${{{C}}_i}$ 为:$${{{C}}_i} = \varGamma {{{A}}_i}(k){\varGamma ^{ - 1}} = \left[ {\begin{array}{*{20}{c}} {1 - T}&T&0 \\ 0&{1 - T}&T \\ {{a_{i1}}}&{{a_{i2}}}&{{a_{i3}} + 1} \end{array}} \right]$$ 式中,
$$\left\{ \begin{aligned} & {a_{i1}} = ({p_{i1}} - {p_{i2}} + 1)T - 1\\ & {a_{i2}} = ( - {p_{i1}} + 2{p_{i2}} - 3)T + 2\\ & {a_{i3}} = (2 - {p_{i2}})T \end{aligned} \right.$$ 为使得参数
${a_{i1}},{a_{i2}},{a_{i3}}$ 满足假设1中的不等式条件,需满足:$$\left\{ \begin{aligned} & {H_1} > T,\quad{H_2} > T\\ & {a_{i1}} > {d_{\max }}T({H_1} + {H_2})\\ & {a_{i2}} > 0\\ & 1 + {a_{i3}} > 0 \end{aligned} \right.$$ 由于所选权重为0.5,则
${d_{\max }} = 1$ ,约束关系变为:$$\left\{ \begin{aligned} & {p_{i1}} - {p_{i2}} > 11\\ & - {p_{i1}} + 2{p_{i2}} > - 17\\ & {p_{i2}} < 12 \end{aligned} \right.$$ 在满足上述约束的条件下,本文所选的参数初值如下:
$$\begin{array}{l} {p_{11}}(0) = {p_{31}}(0) = 13\\ {p_{21}}(0) = {p_{41}}(0) = 13.5\\ {p_{51}}(0) = {p_{61}}(0) = 13\\ {p_{12}}(0) = {p_{32}}(0) = 1\\ {p_{22}}(0) = {p_{42}}(0) = 1.5\\ {p_{52}}(0) = {p_{62}}(0) = 1.5 \end{array}$$ 通信拓扑结构间的状态转移概率矩阵为:
$${{P}} = \left[ {\begin{array}{*{20}{c}} {0.3}&{0.3}&{0.4} \\ {0.4}&{0.4}&{0.2} \\ {0.2}&{0.5}&{0.3} \end{array}} \right]$$ 几个高阶智能体在二维平面(x,y)上的初始状态设置为:
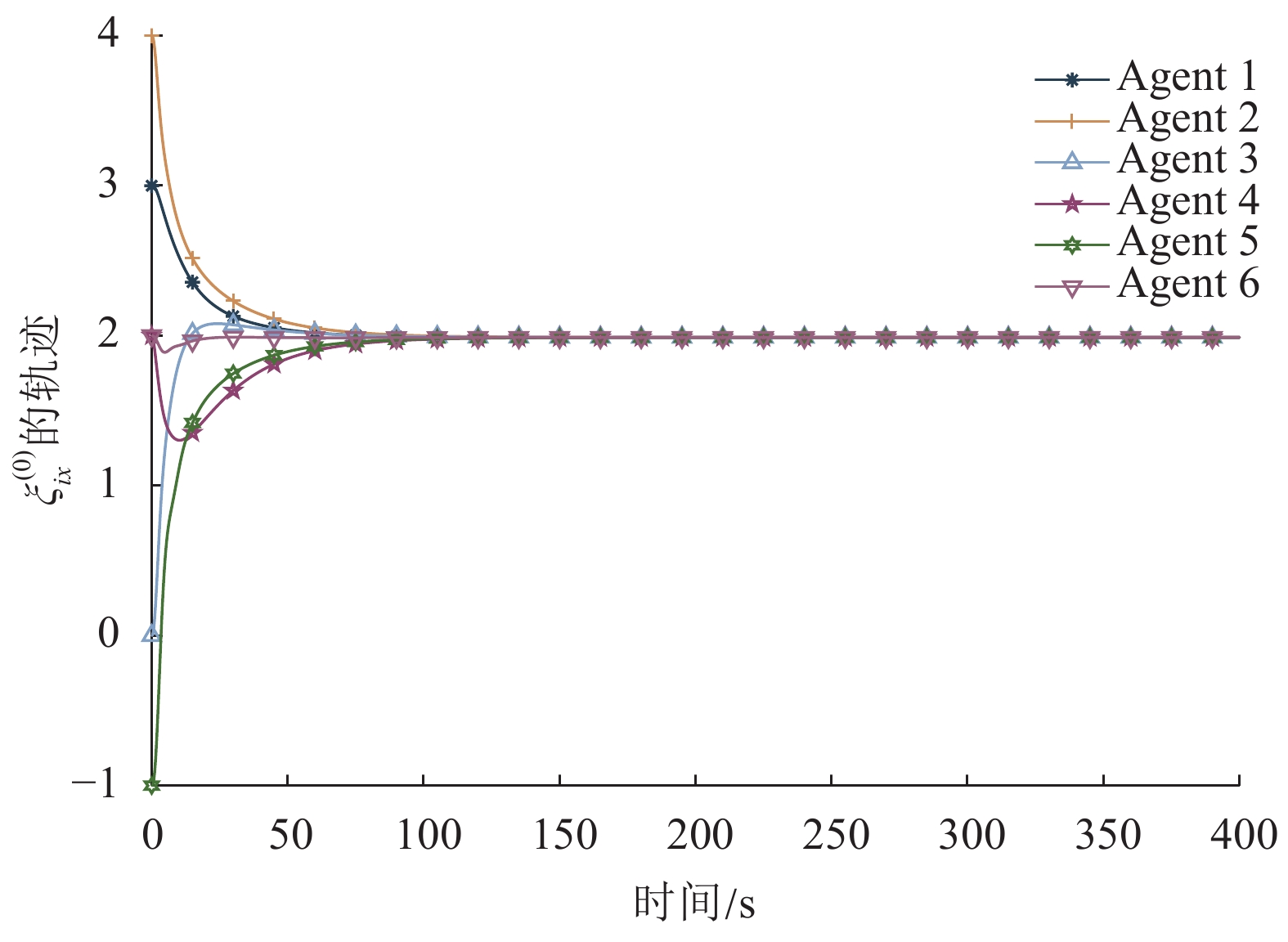
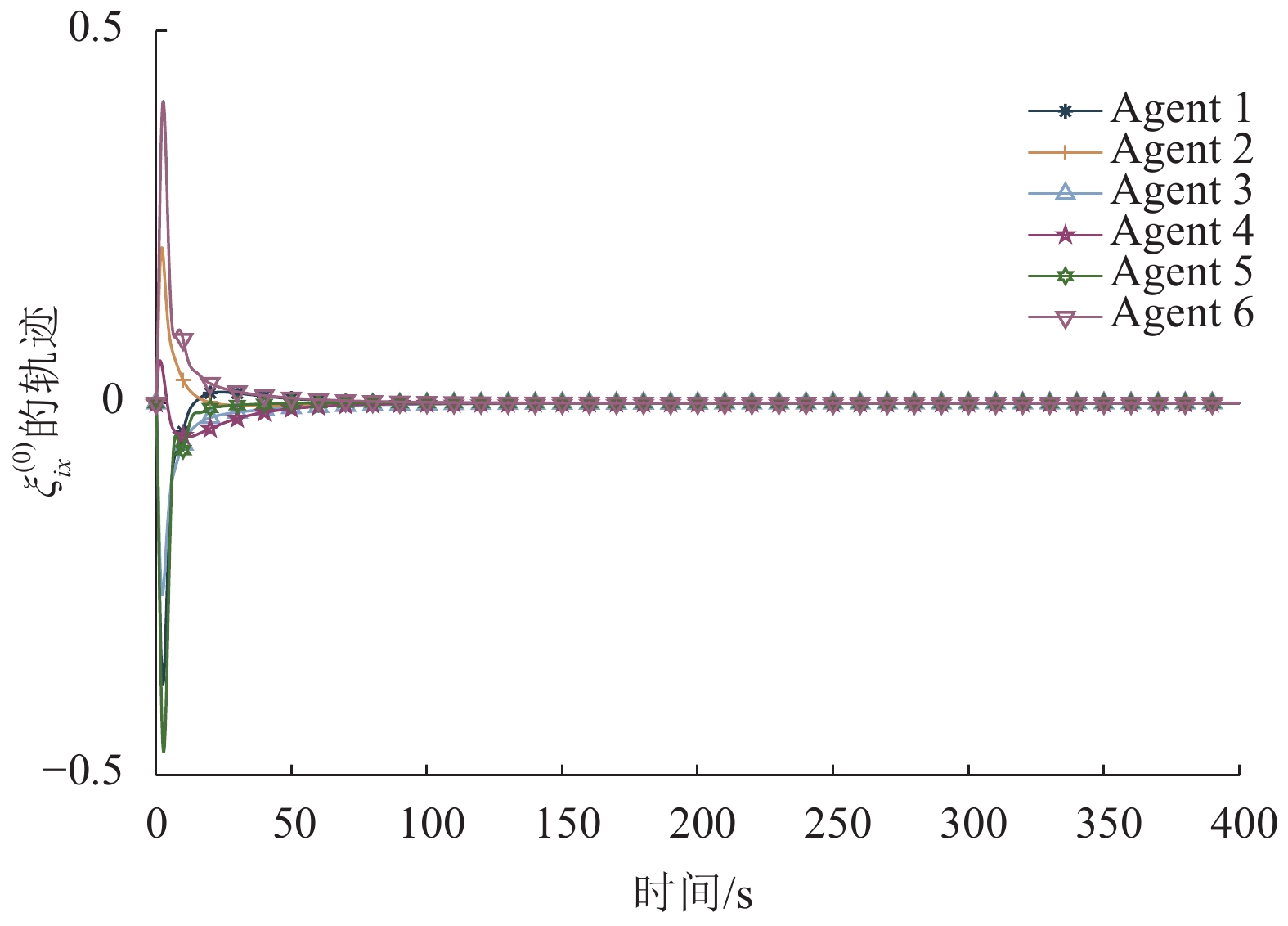
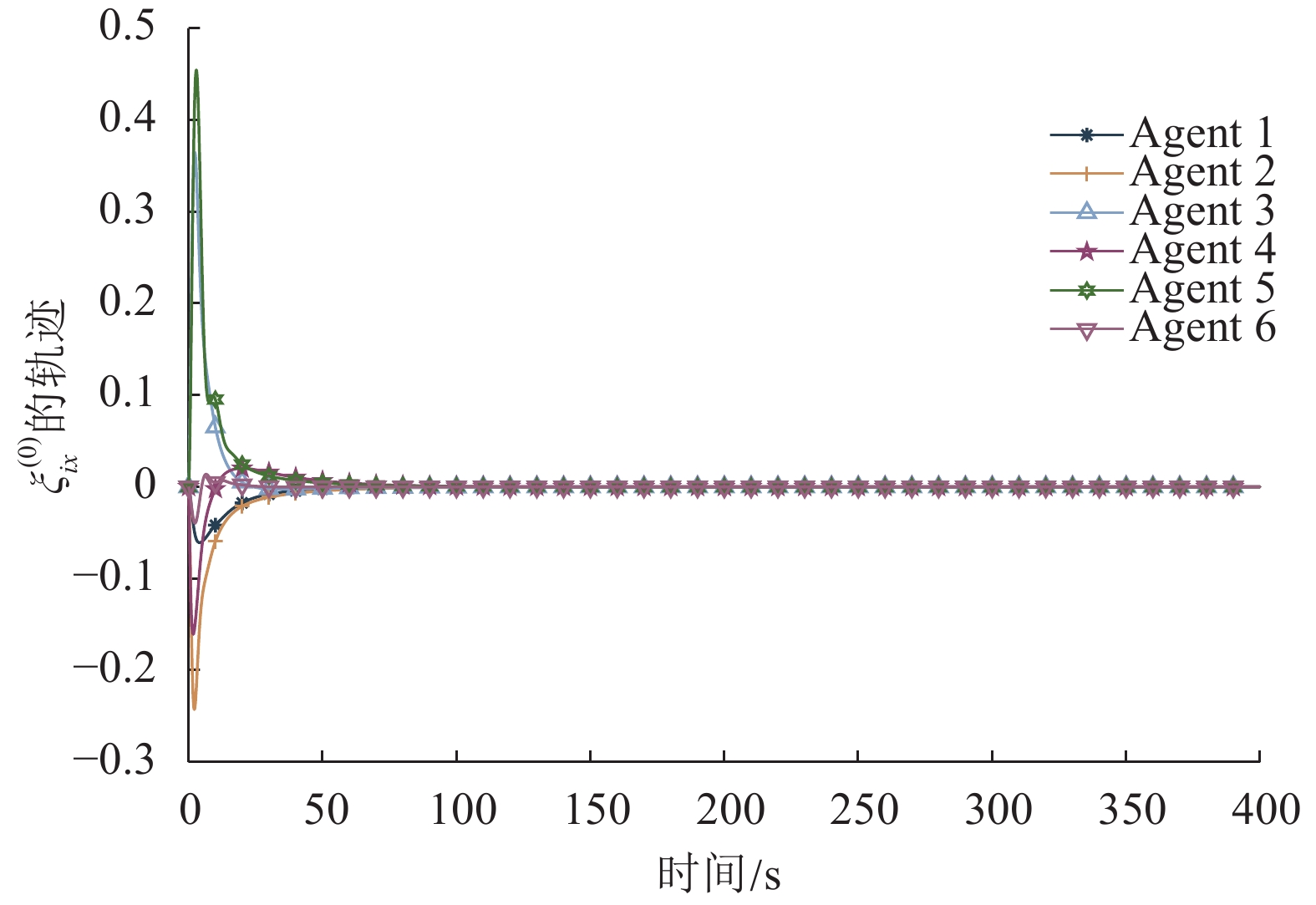
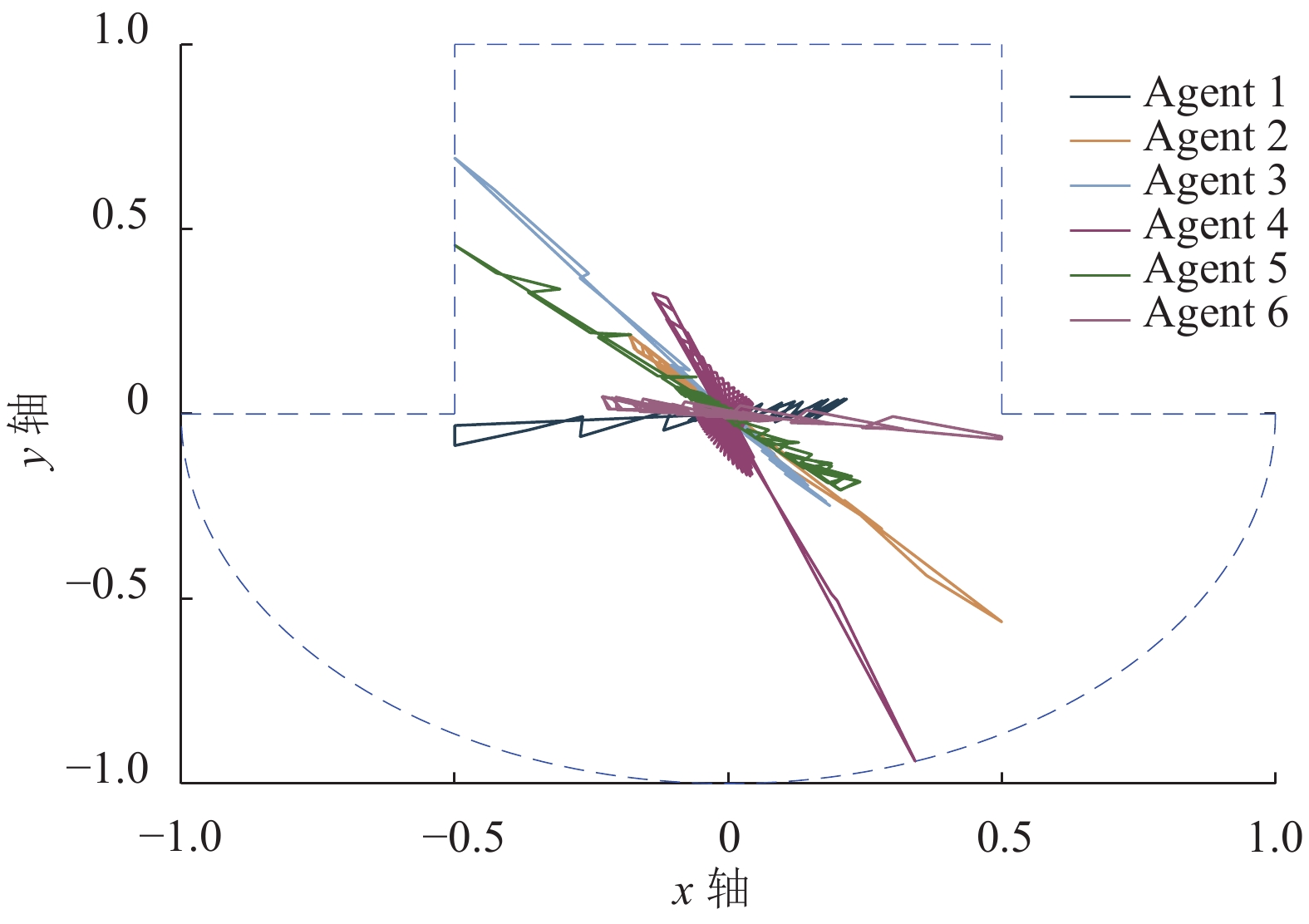
$$\begin{array}{l} \xi _{ix}^{(0)} = \left[ {\begin{array}{*{20}{c}} 3&1&4&3&4&{ - 1} \end{array}} \right]\\ \xi _{iy}^{(0)} = \left[ {\begin{array}{*{20}{c}} 3&1&0&2&{ - 1}&2 \end{array}} \right]\\ \xi _{ix}^{(1)} = \left[ {\begin{array}{*{20}{c}} 0&0&0&0&0&0 \end{array}} \right]\\ \xi _{iy}^{(1)} = \left[ {\begin{array}{*{20}{c}} 0&0&0&0&0&0 \end{array}} \right]\\ \xi _{ix}^{(2)} = \left[ {\begin{array}{*{20}{c}} 0&0&0&0&0&0 \end{array}} \right]\\ \xi _{iy}^{(2)} = \left[ {\begin{array}{*{20}{c}} 0&0&0&0&0&0 \end{array}} \right]\\ i = 1,2,\cdots,6 \end{array}$$ 为验证一致性,通过仿真得到6个高阶智能体在二维平面(x,y)的运动轨迹图。图3~图6显示了所有智能体的一阶、二阶状态在二维平面随时间的变化过程。从仿真图可以看出,选择合适的控制输入参数使得一致性协议符合定义1及定理1所提出的条件时,所有智能体状态最终可以在拓扑结构切换的条件下达到均方一致性。另外,图7显示了所有高阶智能体控制输入的变化趋势,可以看出,其变化范围均在一个非凸的集合内,控制协议式(3)的输入满足相关的约束条件。数值仿真结果说明,高阶多智能体系统能够在拓扑结构Markov切换条件下,实现均方一致性。
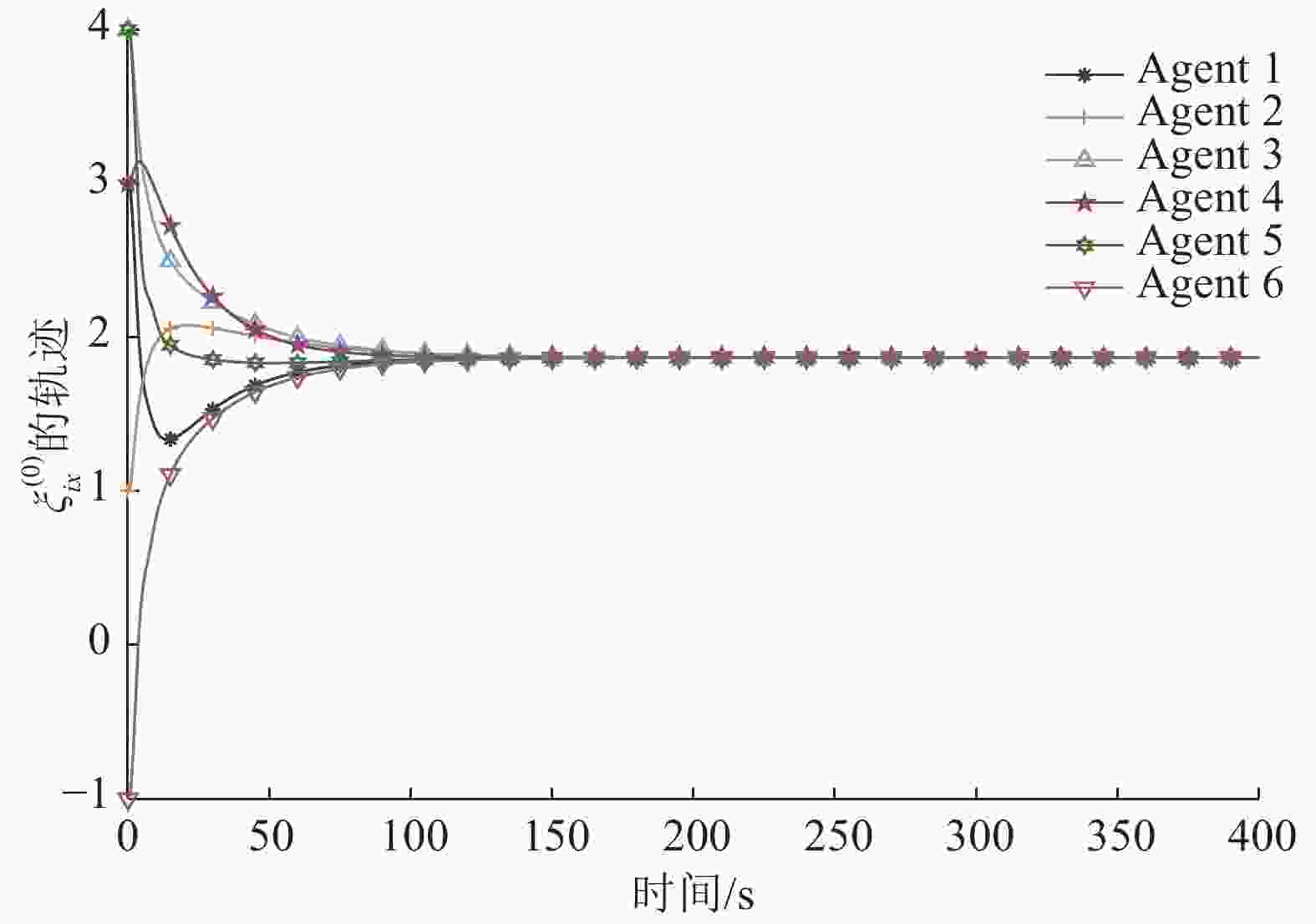
图 3 智能体的
$\xi _i^{(0)}$ 轨迹图(横坐标x)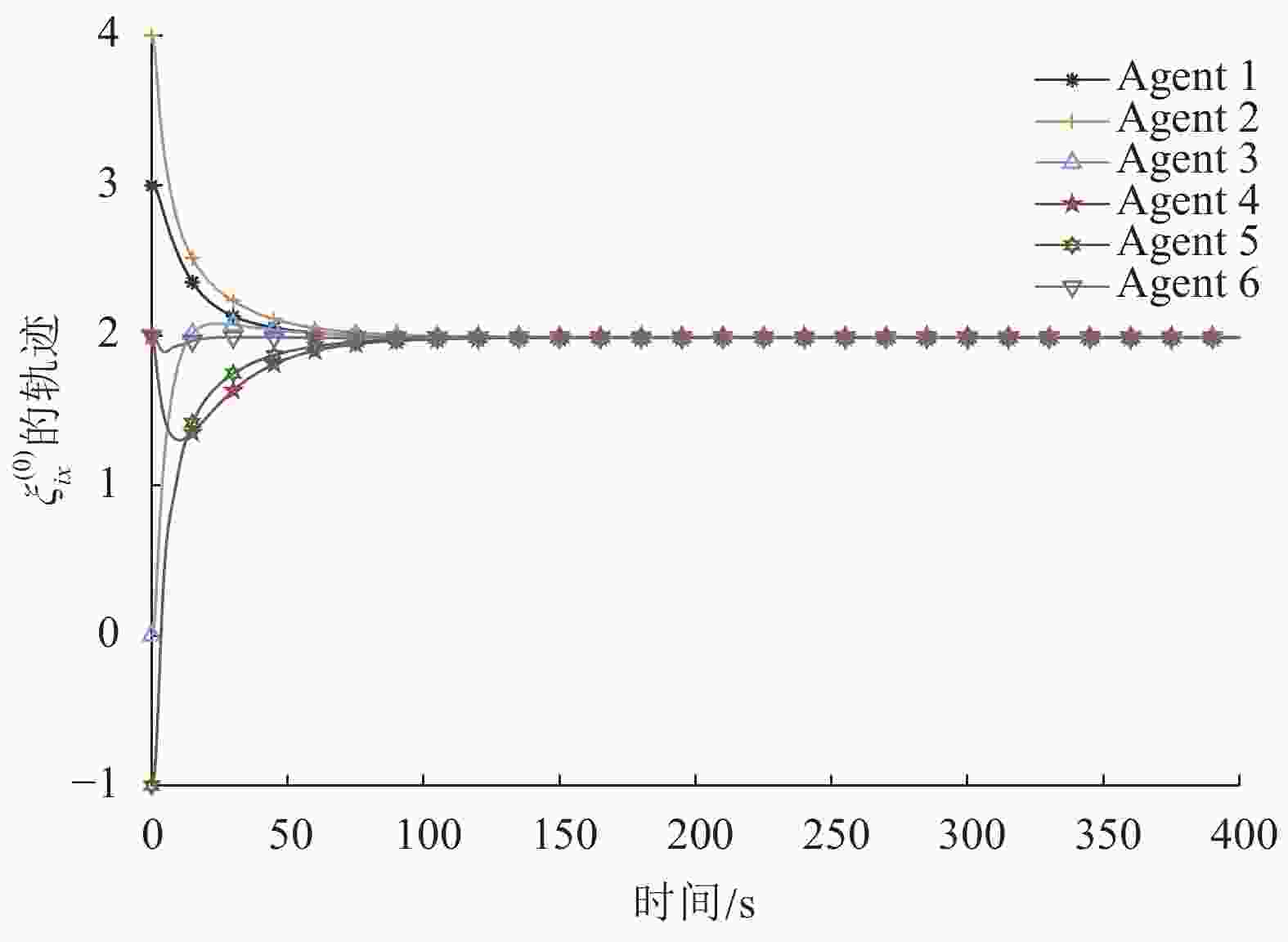
图 4 智能体的
$\xi _i^{(0)}$ 轨迹图(纵坐标y)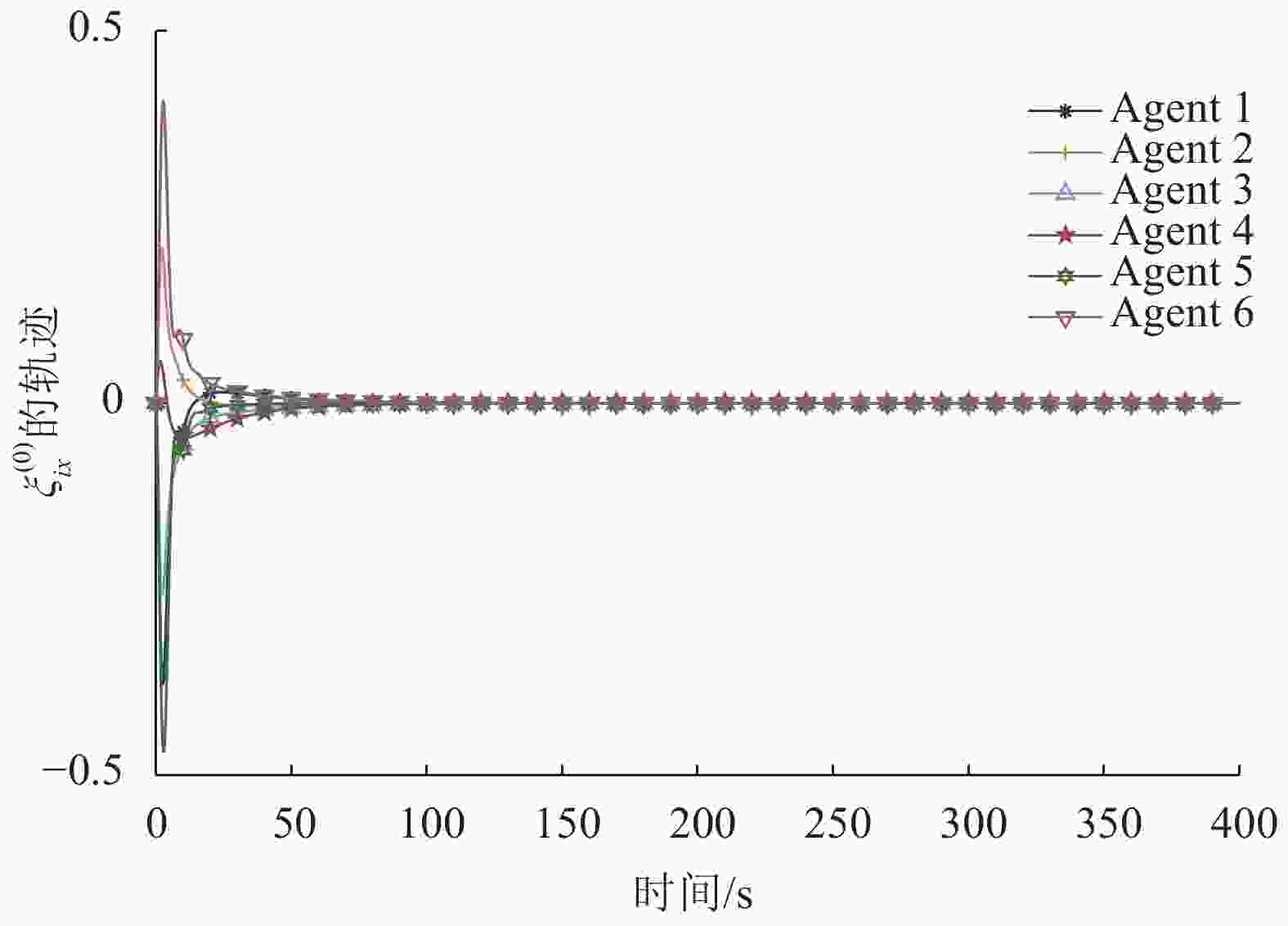
图 5 智能体的
$\xi _i^{(1)}$ 轨迹图(横坐标x)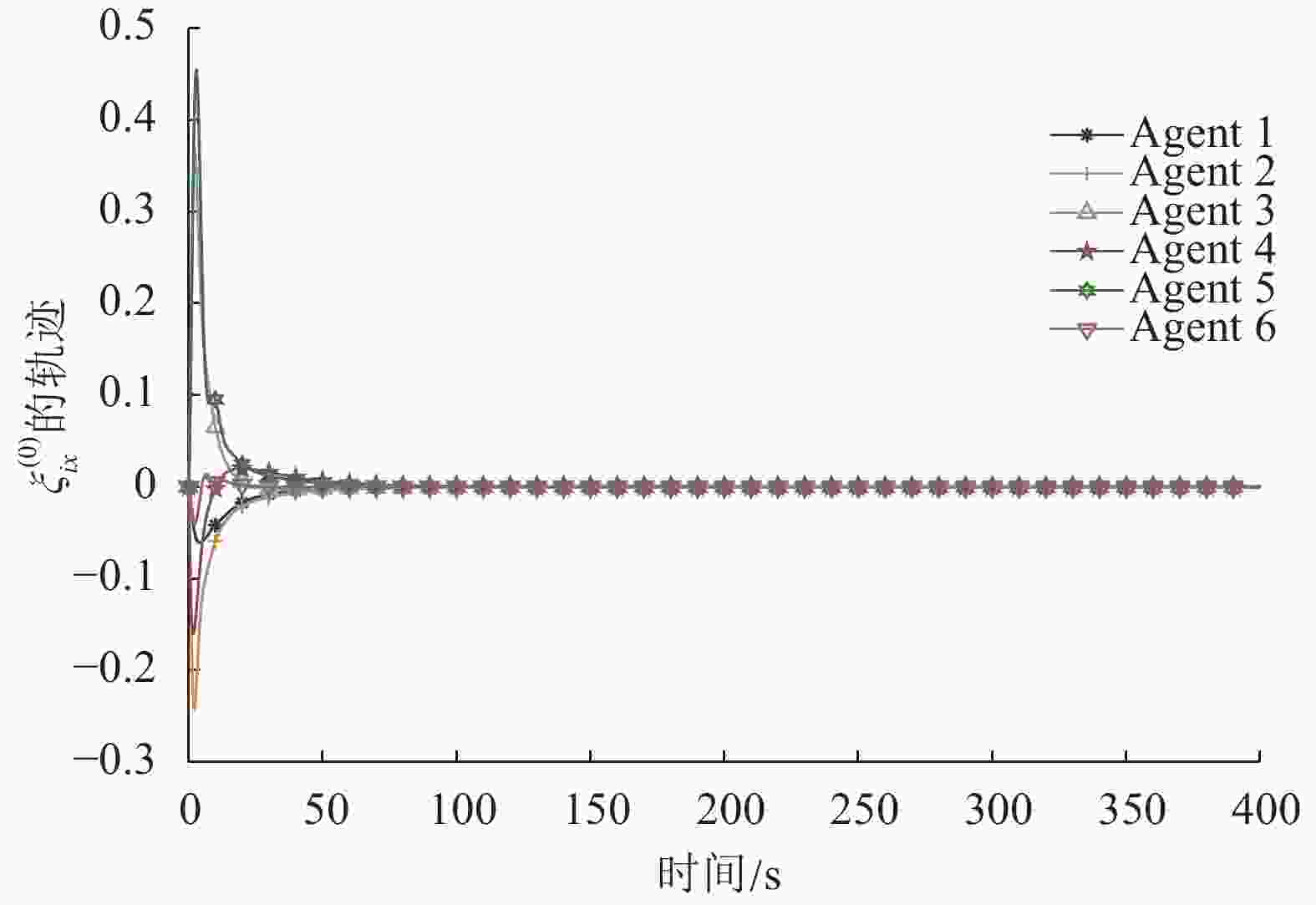
图 6 智能体的
$\xi _i^{(1)}$ 轨迹图(纵坐标y)
图 7 智能体的控制输入
${u_i}$ 轨迹图 -
对于高阶多智能体系统,其状态变量维度大幅增加,相比一阶、二阶系统,维持一致稳定性更为困难。在系统拓扑结构Markov切换且控制输入受约束的条件下,本文研究了这类高阶多智能体系统的均方一致性问题。引入了一个非凸约束算子,并根据多智能体系统中邻居信息,在控制输入受约束的条件下,对高阶智能体设计了相关的控制协议;随后,利用非负矩阵的性质,得到了在拓扑结构Markov切换下,多智能体系统实现均方一致性的充要条件。最后,通过数值仿真,验证了相关的定理。
考虑到在实际应用中,多智能体系统中往往还会出现不确定性扰动等情况,未来也将拓展本文的工作,使其能够在具有不确定性扰动的情况下,实现高阶多智能体系统在控制输入受约束且拓扑结构Markov切换条件下的均方一致性。
Mean Square Consensus of High-Order Multi-Agent with Constrained Control Input
-
摘要: 该文对高阶多智能体系统拓扑结构Markov切换且控制输入受到非凸约束时的均方一致性问题进行了研究。首先,引入了一个非凸约束算子,并且根据多智能体系统中邻居节点信息设计了系统的控制协议;之后,利用非负矩阵的性质,得到了当高阶多智能体系统拓扑结构是Markov切换时,系统能够实现均方一致性的充要条件;最后,通过数值仿真验证了在该控制协议下,系统能够达到均方一致性。Abstract: This paper focuses on the mean square consensus problem of multi-agent system which has the nonconvex input and Markov switching graphs. First, a non-convex constraint operator is introduced and a distributed control algorithm is designed according to the neighbor node information in the multi-agent system. Then, based on the property of non-negative matrix, the sufficient and necessary conditions are obtained for the mean square consensus problem of the multi-agent system with Markov switching graphs. Finally, numerical simulation results validate that the mean square consensus can be achieved when the control input is restricted in a nonconvex set.
-
[1] TKACH I, EDAN Y. Multi-agent task allocation[M]//Distributed Heterogeneous Multi Sensor Task Allocation Systems. Cham: Springer, 2020: 9-14. [2] ZHAO Z, LUO C, ZHAO J, et al. A simulation framework for fast design space exploration of unmanned air system traffic management policies[C]//2019 Integrated Communications, Navigation and Surveillance Conference (ICNS). [S.l.]: IEEE, 2019: 1-10. [3] YANG T, MENG Z, DIMAROGONAS D V, et al. Global consensus for discrete-time multi-agent systems with input saturation constraints[J]. Automatica, 2014, 50(2): 499-506. doi: 10.1016/j.automatica.2013.11.008 [4] LI Y, XIANG J, WEI W. Consensus problems for linear time-invariant multi-agent systems with saturation constraints[J]. IET Control Theory & Applications, 2011, 5(6): 823-829. [5] MENG Z, ZHAO Z, LIN Z. On global leader-following consensus of identical linear dynamic systems subject to actuator saturation[J]. Systems & Control Letters, 2013, 62(2): 132-142. [6] KIM Y, MESBAHI M. Quadratically constrained attitude control via semidefinite programming[J]. IEEE Transactions on Automatic Control, 2004, 49(5): 731-735. doi: 10.1109/TAC.2004.825959 [7] 程小军, 崔祜涛, 崔平远, 等. 具有非凸约束的航天器姿态机动预测控制[J]. 宇航学报, 2011, 32(5): 1070-1076. doi: 10.3873/j.issn.1000-1328.2011.05.016 CHENG Xiao-jun, CUI Hu-tao, CUI Ping-yuan, et al. Attitude maneuver prediction control of spacecraft with non-convex constraints[J]. Acta Astronautica, 2011, 32(5): 1070-1076. doi: 10.3873/j.issn.1000-1328.2011.05.016 [8] JIA Y. Robust control with decoupling performance for steering and traction of 4WS vehicles under velocity-varying motion[J]. IEEE Transactions on Control Systems Technology, 2000, 8(3): 554-569. doi: 10.1109/87.845885 [9] AÇIKMEŞE B, CARSON J M, BLACKMORE L. Lossless convexification of nonconvex control bound and pointing constraints of the soft landing optimal control problem[J]. IEEE Transactions on Control Systems Technology, 2013, 21(6): 2104-2113. doi: 10.1109/TCST.2012.2237346 [10] WANG Y, LI Q, XIONG Q, et al. Distributed consensus of high-order continuous-time multi-agent systems with nonconvex input constraints, switching topologies, and delays[J]. Neurocomputing, 2019, 332: 10-14. [11] WOLFOWITZ J. Products of indecomposable, aperiodic, stochastic matrices[J]. Proceedings of the American Mathematical Society, 1963, 14(5): 733-737. doi: 10.1090/S0002-9939-1963-0154756-3 [12] 周绍磊, 康宇航, 郭志强, 等. 具有通信时延下多无人机编队控制[J]. 科技导报, 2017, 35(7): 79-84. ZHOU Shao-lei, KANG Yu-hang, GUO Zhi-qiang, et al. Formation control of multi-UAV with communication delay[J]. Science and Technology Bulletin, 2017, 35(7): 79-84. [13] REN W, BEARD R W. Consensus seeking in multiagent systems under dynamically changing interaction topologies[J]. IEEE Transactions on Automatic Control, 2005, 50(5): 655-661. doi: 10.1109/TAC.2005.846556 [14] SAYYAADI H, DOOSTMOHAMMADIAN M R. Finite-time consensus in directed switching network topologies and time-delayed communications[J]. Scientia Iranica, 2011, 18(1): 75-85. doi: 10.1016/j.scient.2011.03.010 [15] TIAN Y P, LIU C L. Consensus of multi-agent systems with diverse input and communication delays[J]. IEEE Transactions on Automatic Control, 2008, 53(9): 2122-2128. doi: 10.1109/TAC.2008.930184 [16] LIU W, HUANG J. Adaptive leader-following consensus for a class of higher-order nonlinear multi-agent systems with directed switching networks[J]. Automatica, 2017, 79: 84-92. doi: 10.1016/j.automatica.2017.02.010 [17] HE W, CAO J. Consensus control for high-order multi-agent systems[J]. IET Control Theory & Applications, 2011, 5(1): 231-238. [18] LIN P, REN W, GAO H. Distributed velocity-constrained consensus of discrete-time multi-agent systems with nonconvex constraints, switching topologies, and delays[J]. IEEE Transactions on Automatic Control, 2016, 62(11): 5788-5794. [19] LIN P, REN W. Constrained consensus in unbalanced networks with communication delays[J]. IEEE Transactions on Automatic Control, 2013, 59(3): 775-781. [20] LIN P, REN W, YANG C, et al. Distributed consensus of second-order multiagent systems with nonconvex velocity and control input constraints[J]. IEEE Transactions on Automatic Control, 2017, 63(4): 1171-1176. [21] XIE D, CHENG Y. Bounded consensus tracking for sampled-data second-order multi-agent systems with fixed and Markovian switching topology[J]. International Journal of Robust and Nonlinear Control, 2015, 25(2): 252-268. doi: 10.1002/rnc.3085 [22] 莫立坡, 潘婷婷. Markov 切换拓扑下异构多智能体系统的均方一致性[J]. 中国科学: 信息科学, 2016, 46(11): 1621. MO Li-po, PAN Ting-ting. Mean square consistency of heterogeneous multi-agent systems under Markov switching topology[J]. Science of China: Information Science, 2016, 46(11): 1621. [23] WEST D B. Introduction to graph theory[M]. Upper Saddle River: Prentice Hall, 2001. [24] HORN R A, JOHNSON C R. Matrix analysis[M]. [S.l.]: Cambridge University Press, 2012. -

 点击查看大图
点击查看大图

图(7)
计量
- 文章访问数: 5474
- HTML全文浏览量: 1576
- PDF下载量: 34
- 被引次数: 0


































































































































































