 ISSN
ISSN 






























-
粒子群优化算法(particle swarm optimization, PSO)作为一种群体优化算法,具有收敛速度快、模型创建简单的特点,在单目标问题上得到了广泛的应用。当今的科研实践中需要在兼顾多个指标的基础上对问题进行处理,促使研究者尝试将粒子群算法应用于多目标优化领域。文献[1]在所提时变MOPSO算法中,采用时变的惯性权重和学习因子,提高粒子群在算法初始阶段的搜索范围。文献[2]提出了一种自组织分等级粒子群优化算法,以迭代次数的形式对学习因子进行动态调节。文献[3]提出一种基于网格的进化算法,增强了粒子在最优方向上的拓展性。文献[4]提出了一种平行单元配合系统,用来评估进化环境。文献[5]提出一种种群极值变异的改进多目标粒子群算法,与多目标极值优化(multi-objective population-based extremal optimization algorithm, MOPEO)算法相比有较大提升。文献[6]将算法分成智能多搜索方法模块和粒子群优化模块,提高了算法的收敛速度和解的质量。文献[7]提出了多策略改进的多目标融合算法,提高了算法的收敛性。上述改进算法均没有对解的多样性进行研究。本文为提高多目标粒子群优化算法的收敛性和多样性,提出一种改进的多目标粒子群优化算法。该算法在标准多目标粒子群算法的基础上,引入了多种群协同进化、反三角函数logistic映射初始化、时变变异等,在一定程度上提高了粒子群优化算法的全局搜索能力,提供一个多样性和延展性较好的Pareto前沿,并将其应用在雷达布站应用中,验证了算法的有效性。
-
多目标优化问题的目的是在多个目标彼此冲突的情况下,通过优化算法使多个目标达到最优。多目标优化问题通常会得到一组折中解。具体解的选取要根据决策者的需求做出权衡。假设当前的问题为最小化问题,则可以表示为:
$$ \begin{split} & {\rm{min}}\;f(x) = [{f_1}(x),{f_2}(x), \cdots ,{f_M}(x)]\\ &\quad\; {\rm{s}}{\rm{.t}}{\rm{.}}\,\,{g_r}(x) \leqslant 0\;\;r = 1,2, \cdots ,m\\ & \;\;{h_s}(x) = 0\;\;s = m + 1,m +2, \cdots ,v \end{split} $$ (1) 式中,
$x = {({x_1},{x_2}, \cdots ,{x_n})^{\rm{T}}}$ 是$n$ 维决策变量;${f_i}(x)$ 为子目标函数;${g_r}(x)$ 和${h_s}(x)$ 为该优化问题的约束条件,约束条件共有$v$ 个。对于多目标优化问题,近年来多使用Pareto概念进行研究。定义1 Pareto支配:对于决策变量
$x$ 和$y$ ,若$x$ Pareto支配$y$ ,则$\forall i \in \{ 1,2, \cdots ,n\} $ :${f_i}(x) \leqslant {f_i}(y)$ $ \wedge $ $\exists j \in \{ 1,2, \cdots ,n\} :{f_j}(x) < {f_j}(y)$ 。记为$x \prec y$ 。定义2 Pareto最优解:对于决策空间
${\Omega ^n}$ 中任意点${x^ * }$ ,不存在$x \in {\Omega ^n}:x \prec {x^*}$ ,则称${x^*}$ 为Pareto最优解。定义3 Pareto最优解集:决策空间中
${\Omega ^n}$ 中所有Pareto最优解构成的解集称为Pareto最优解集。定义4 Pareto前沿:在Pareto最优解集中,最优解对应的目标函数值构成的曲线称为Pareto前沿。
粒子群算法在优化问题中应用较广泛,标准的粒子群算法中粒子的速度和位置更新公式如下:
$$v_i^{t + 1} = wv_i^t + {c_1}{r_1}( {p_i^t - x_i^t} ) + {c_2}{r_2}( {{g^t} - x_i^t} )$$ (2) $$x_i^{t + 1} = x_i^t + v_i^{t + 1}$$ (3) 式中,
$v_i^{t + 1}$ 表示粒子i第t+1次迭代时的速度;$x_i^{t + 1}$ 表示粒子i第t+1次迭代时的位置;$w$ 为惯性权重;${c_1}$ 、${c_2}$ 代表学习因子;${r_1}$ 、${r_2}$ 为$[0,1]$ 之间的随机数;$p_i^t$ 为第t次迭代时粒子的个体最优位置;${g^t}$ 为第t次迭代时种群的全局最优位置。 -
为了提高算法全局搜索的能力,将种群分成多个子种群,每个子种群均有全局最优粒子,提高了全局搜索能力。子种群既独立搜索,又受其他种群的影响,将搜索到的非劣解存入外部档案集中。由于引入多种群思想,粒子的速度将不仅受个体最优位置和全局最优位置的影响,还要受到外部档案中粒子位置的影响。每个种群中粒子的速度和位置更新公式如下:
$$ \begin{split} & v_i^{t + 1} = w(t)v_i^t + {c_1}{r_1}( {p_i^t - x_i^t} ) + {c_2}{r_2}( {{g^t} - x_i^t} )+\\ &\qquad\qquad\qquad {c_3}{r_3}({a_i} - x_i^t) \end{split} $$ (4) $$x_i^{t + 1} = x_i^t + v_i^{t + 1}$$ (5) 式中,
$x_i^t$ 、$v_i^t$ 、$x_i^{t + 1}$ 、$v_i^{t + 1}$ 分别表示第t代和第t+1代粒子的位置和速度;${c_1}$ 、${c_2}$ 和${c_3}$ 为权重系数;$w(t)$ 为惯性权重;${r_1}$ 、${r_2}$ 和${r_3}$ 为$[0,1]$ 之间的随机数;$p_i^t$ 、${g^t}$ 分别为个体最优位置和全局最优位置;${a_i}$ 为外部档案中粒子位置。${c_3}{r_3}({{{a}}_i} - x_i^t)$ 项可以实现不同种群之间信息共享,使该粒子学习其他种群中粒子的信息,从而快速收敛到Pareto前沿。由于惯性权重较小时局部细化搜索较优,较大时全局搜索较优[8]。本文提出随着迭代次数t的增加,惯性权重将会适时变化,从而提高收敛速度。惯性权重的变化公式为:
$$w(t) = {w_{\max }} - \frac{{{w_{\max }} - {w_{\min }}}}{{{t_{\max }}}} t$$ (6) 式中,
${w_{\max }}$ 、${w_{\min }}$ 分别为权重系数的最大值和最小值;${t_{\max }}$ 为最大迭代次数。 -
由于多目标粒子群优化算法对粒子初始值较为敏感,一个分布较均匀的初始种群会使得到的Pareto前沿分布性更好,得到多样性和收敛性好的解集概率越大。多数MOPSO算法是通过随机产生初始种群的方式,无法保证初始种群覆盖问题的决策空间,容易陷入局部最优,从而无法保持种群多样性。由于反三角函数logistic映射在区间
$[0,{\text π}/2]$ 上分布比较均匀[9],本文采用反三角函数logistic映射对初始种群进行赋值。反三角函数logistic映射公式为:$${y_{n + 1}} = \arcsin \sqrt {4{x_n}\left( {1 - {x_n}} \right)} $$ (7) 利用式(7)生成在区间
$[0,{\text π}/2]$ 的随机数$r$ ,设粒子位置的取值范围为$[{x_{\min }},{x_{\max }}]$ ,则粒子的初始位置为:$${x_i}(0) = {x_{\min }} +2 r/{\text π} \left( {{x_{\max }} - {x_{\min }}} \right)$$ (8) 这种初始化方法可使初始种群在决策空间中均匀分布,为算法的搜索提供了良好的开端。
-
由于PSO算法具有快速收敛的性质,可能会导致过早的收敛到局部Pareto前端。为了避免这种早熟现象,本文引入了一种时变变异算子
${p_m}$ ,通过变异参数$\alpha $ 调节变异概率,其中${p_m} = {{\rm{e}}^{( - \alpha t/{{{T}}_{{\rm{max}}}})}}$ ,t为迭代次数。在第t次迭代中,粒子变异步骤如下:1)在
$[0,1]$ 区间产生随机数${r_1}$ 。2)如果时变变异算子
${p_m}$ 大于${r_1}$ ,则在1和决策变量维数n之间随机选取一个整数j;否则进入下一次变异循环。3)根据
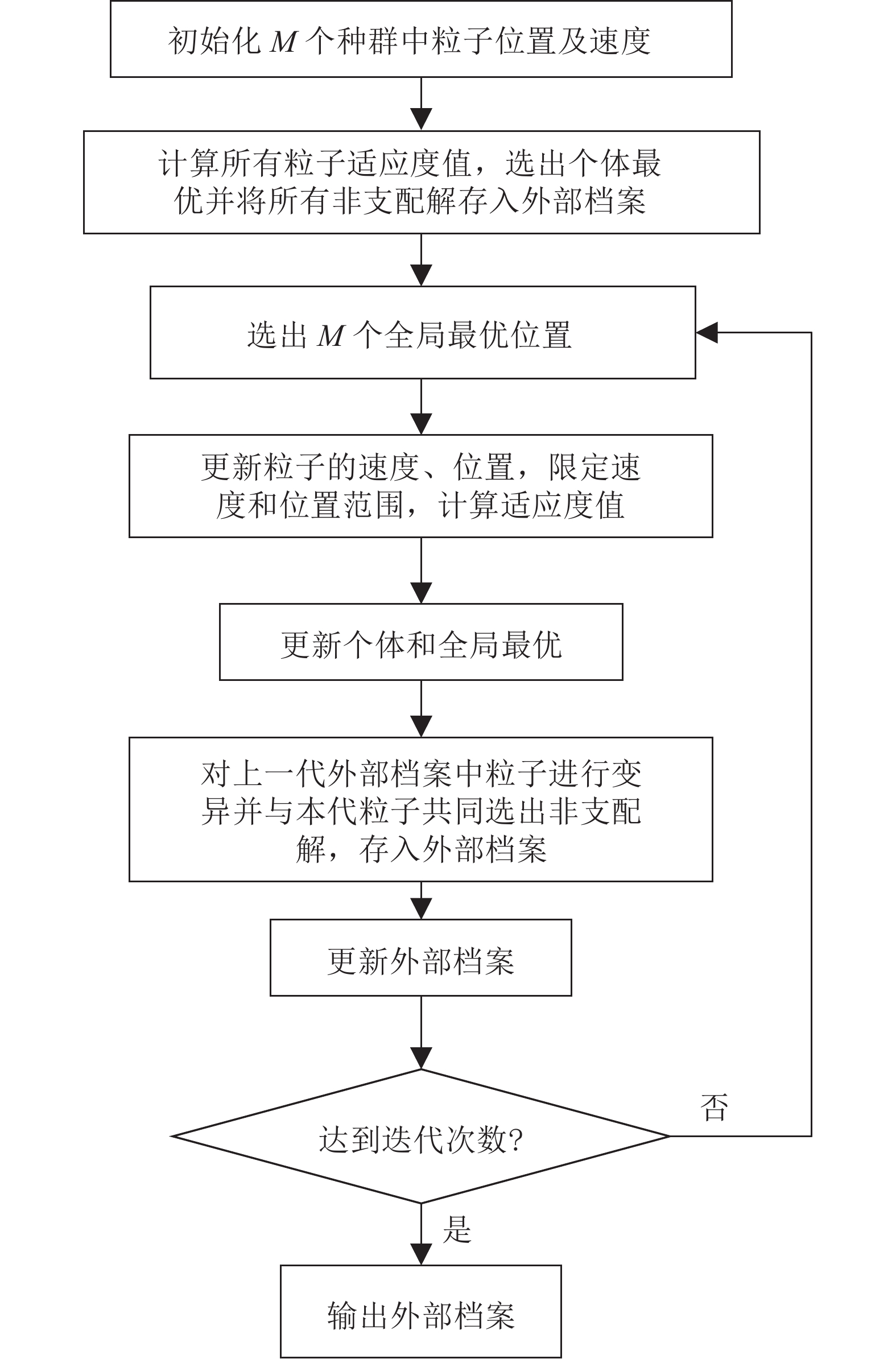
${x_{i,j}} = {x_{\min }} + ({x_{\max }} - {x_{\min }}) {r_2}$ 对粒子i的第j维进行变异,${r_2}$ 为$[0,1]$ 区间随机数。改进的MOPSO算法完整步骤如下:
1)设定算法相关参数,限定速度和位置范围。利用反三角函数logistic映射对M个种群进行初始化,确定初始位置;
① 计算所有粒子对应的适应度值,更新个体最优位置;② 根据适应度值,将所有种群中存在非支配关系的粒子存入外部档案中;③ 每个种群选出其全局最优位置。
2)每个种群中粒子均利用式(4)、式(5)更新粒子的位置和速度,计算适应度值。
3)选出个体最优位置和全局最优位置。
4)对上一代形成的外部档案中粒子进行变异。
5)计算变异粒子新的适应度值,与本代粒子共同选出非支配解,更新外部档案集。
6)判断是否满足终止条件,满足则输出外部档案退出,不满足返回步骤3)。
算法流程如图1所示。
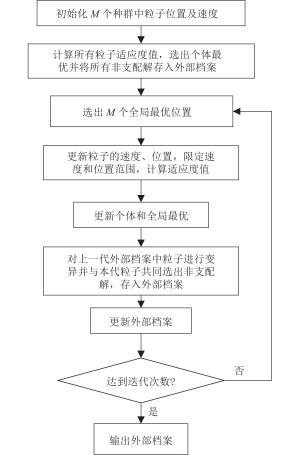
图 1 改进的MOPSO算法流程图
-
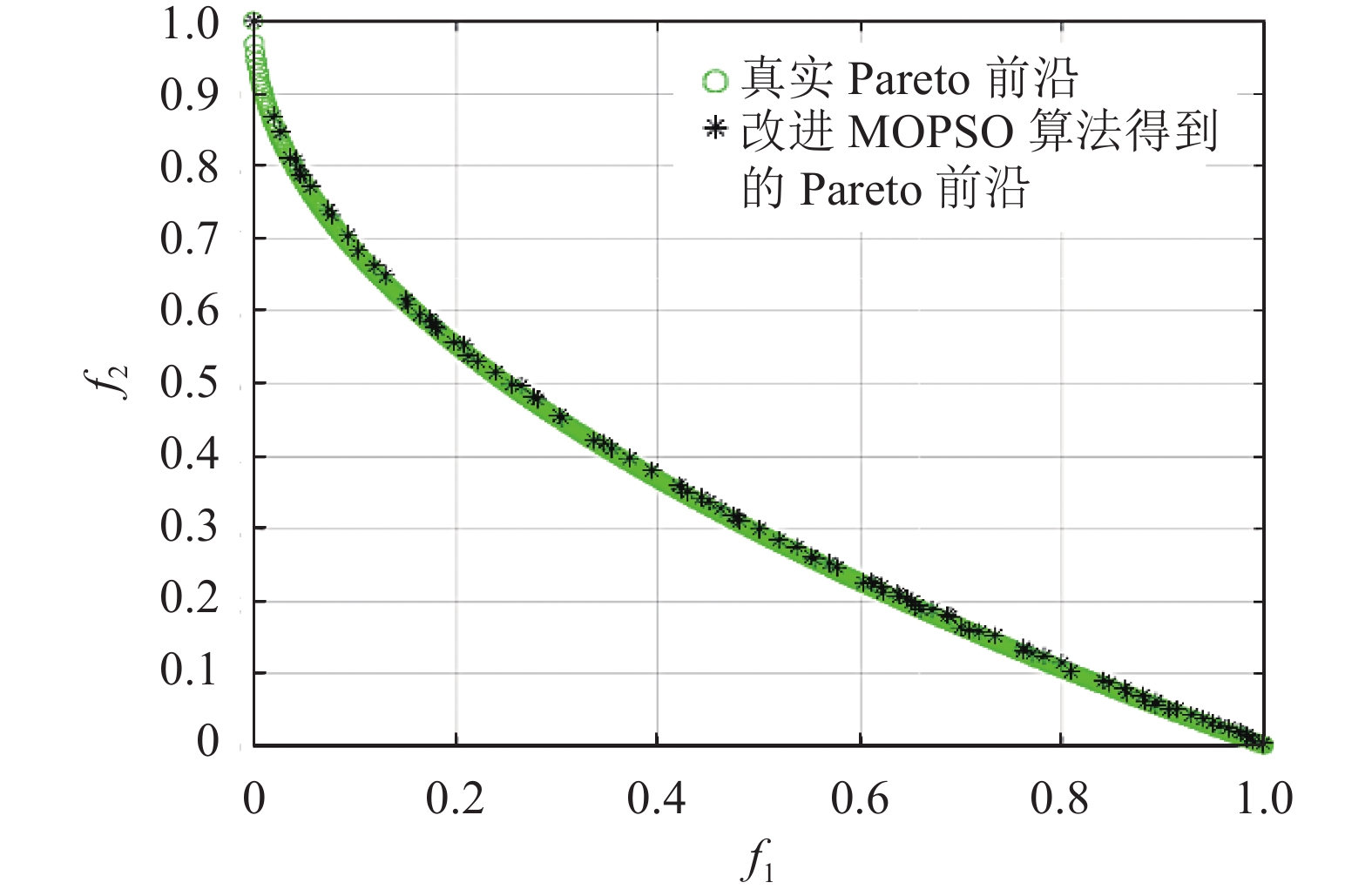
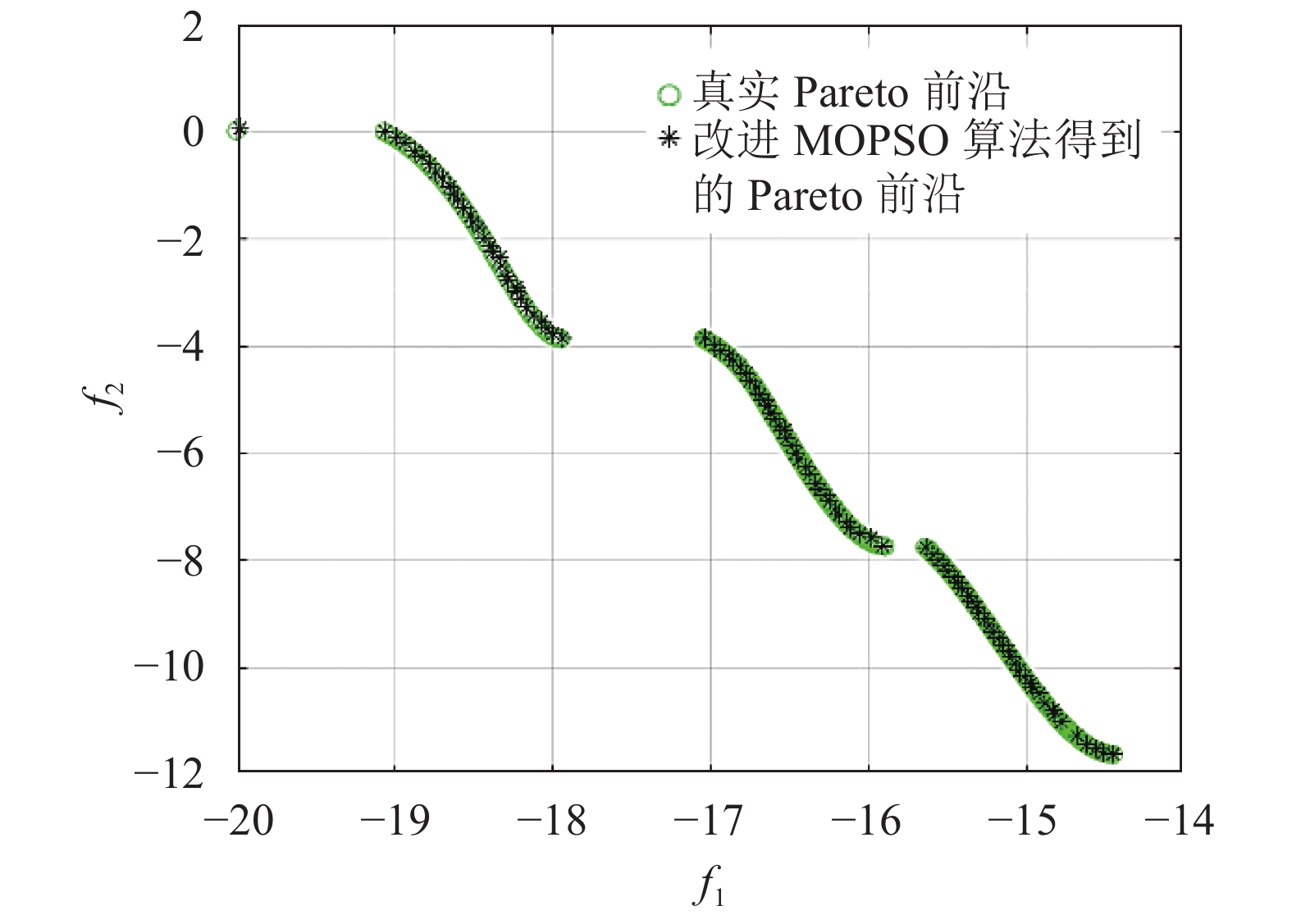
为了验证改进算法的性能,选择标准测试函数ZDT1、ZDT2、KUR进行测试,分别以GD(世代距离)、SP(空间度量指标)、IGD(反转世代距离)为指标进行验证,与同等条件下的NSGA-Ⅱ算法和标准MOPSO算法进行比较,3个指标越小则说明算法性能越好。改进的MOPSO算法各参数设置如下:分为两个子种群;每个种群规模100;决策变量维度100;外部档案规模100;个体学习因子1.494 45;社会学习因子1.494 45;种群学习因子1.9;变异参数0.3;惯性权重最大值0.9,最小值0.5,迭代次数350。为保持可比性,其他算法参数设置相同。图2~图4为仿真结果,由仿真曲线可知,改进算法得到的Pareto前沿与真实Pareto前沿基本一致。
重复独立进行30次实验,NAGA-Ⅱ算法、标准MOPSO算法和改进MOPSO算法的测试数据如表1所示。
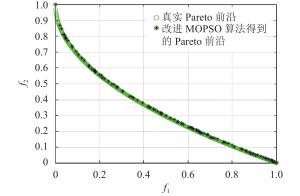
图 2 ZDT1测试函数曲线

图 3 ZDT2测试函数曲线

图 4 KUR测试函数曲线
表 1 3种算法测试数据对比表
测试函数 优化算法 评价指标 GD SP IGD ZDT1 改进MOPSO $ {{\bf{4.0}} \times }{{{\bf{10}}}}^{{-{\bf{4}}}} $ $ {1.07 \times }{{10}}^{{-2}} $ $ {{\bf{7.2}} \times }{{{\bf{10}}}}^{{-{\bf{3}}}} $ MOPSO $ {9.0 \times }{{10}}^{{-4}} $ $ {{\bf{0.3}} \times }{{{\bf{10}}}}^{{-{\bf{2}}}} $ $ {8.6 \times }{{10}}^{{-3}} $ NAGA-Ⅱ $ {7.81 \times }{{10}}^{{-2}} $ $ {0.7 \times }{{10}}^{{-2}} $ $ {7.1 \times }{{10}}^{{-1}} $ ZDT2 改进MOPSO $ {{\bf{3.0}} \times }{{{\bf{10}}}}^{{-{\bf{4}}}} $ $ {{\bf{3.0}} \times }{{{\bf{10}}}}^{{-{\bf{4}}}} $ $ {{\bf{5.6}} \times }{{{\bf{10}}}}^{{-{\bf{3}}}} $ MOPSO $ {8.0 \times }{{10}}^{{-4}} $ $ {6.2 \times }{{10}}^{{-3}} $ $ {9.2 \times }{{10}}^{{-3}} $ NAGA-Ⅱ $ {9.12 \times }{{10}}^{{-2}} $ $ {7.0 \times }{{10}}^{{-3}} $ $ {10.2 \times }{{10}}^{{-1}} $ KUR 改进MOPSO $ {2.5 \times }{{10}}^{{-3}} $ $ {{\bf{2.65}} \times }{{{\bf{10}}}}^{{-{\bf{2}}}} $ $ {{\bf{3.5}} \times }{{{\bf{10}}}}^{{-{\bf{2}}}} $ MOPSO $ {{\bf{2.2}} \times }{{{\bf{10}}}}^{{-{\bf{3}}}} $ ${ { {2.2} } \times }{ { { {10} } } }^{ {-{ {2} } } }$ $ {4.7 \times }{{10}}^{{-2}} $ NAGA-Ⅱ $ {3.289 \times }{{10}}^{{-1}} $ $ {2.02 \times }{{10}}^{{-1}} $ $ {13.4 \times }{{10}}^{{-1}} $ 由表1可知:改进的MOPSO算法优于NSGA-Ⅱ算法。尽管在测试函数ZDT1的SP指标和KUR的GD指标上,标准MOPSO算法优于改进的MOPSO算法,但其他指标均差于改进的MOPSO算法,因此改进的MOPSO算法总体性能优于MOPSO。从而验证了改进的MOPSO算法有较好的收敛性和多样性。
-
由于雷达系统不同任务需要通过不同的指标进行评价,因此需要在多性能指标约束下,对系统资源进行优化配置。利用改进的MOPSO算法生成合理的雷达天线节点布站方案,从而提升雷达系统对监视区域的有效覆盖性能及定位性能,在二维平面研究一个工作于MIMO模式的网络化雷达系统,假设系统采用平方律检波器对探测对象进行检测[10]。参照文献[11-12]的信号模型,系统可以同时处理探测和无源定位任务。
-
网络化雷达监视区域有效覆盖率的定义如下:
$${S_R}(\Theta ) = \frac{{{{C}}\bigcap {{A}} }}{{{A}}}$$ (9) 式中,C为雷达有效覆盖区域;A为监视区域。
${S_R}$ 越大则监测性能越好。根据文献[11]中构建的监视区域覆盖率模型,监视区域中有多个分辨单元。雷达系统由N部单基地雷达组成。雷达系统对于每个分辨单元内探测对象的检测概率为:$${\overline {{P}} _{\rm{d}}} = {Q_{N N}}(\sqrt {2 {\xi _l}} ,\sqrt {2 {\gamma _T}} )$$ (10) $${\overline {{P}} _{{\rm{fa}}}} = {{\rm{e}}^{ - {\gamma _T}}}\sum\limits_{j = 0}^{N N - 1} {\gamma _T^j} /j!$$ (11) 式中,
$Q$ 代表Marcum函数;${\gamma _T}$ 代表检测门限;${\overline {{P}} _{{\rm{fa}}}}$ 代表虚警概率;${\xi _l}$ 代表所有收发通道内回波信号与噪声功率的比值。当某个分辨单元的检测概率
${\overline {{P}} _{\rm{d}}}$ 大于检测门限${\gamma _T}$ 时,则认为此分辨单元能够被有效覆盖。根据式(9)~式(11)即可求得每个分辨单元的分辨情况,完成所有分辨单元的统计后,即可得出监视区域的覆盖率${S_R}$ 。 -
对于定位性能,考虑系统采用时差定位法(time difference of arrival, TDOA)对目标进行分布式定位。分别计算目标位于分辨单元中心时的几何定位精度(geometric dilution precision, GDOP),再将所有分辨单元中GDOP值求和取平均,得到雷达系统的定位性能:
$${A_g}(\Theta ) = \frac{1}{K}\sum\limits_{i = 1}^K {{{\rm{GDOP} }_i}} $$ (12) 式中,
$\Theta $ 为天线布局方案;K为分辨单元数量。 -
以覆盖性能和无源定位精度为目标的雷达系统天线优化布站问题可以建立为:
$$\min T(\Theta ) = (1 - {S_R}(\Theta ),{A_g}(\Theta ))$$ (13) 假设监视区域大小为
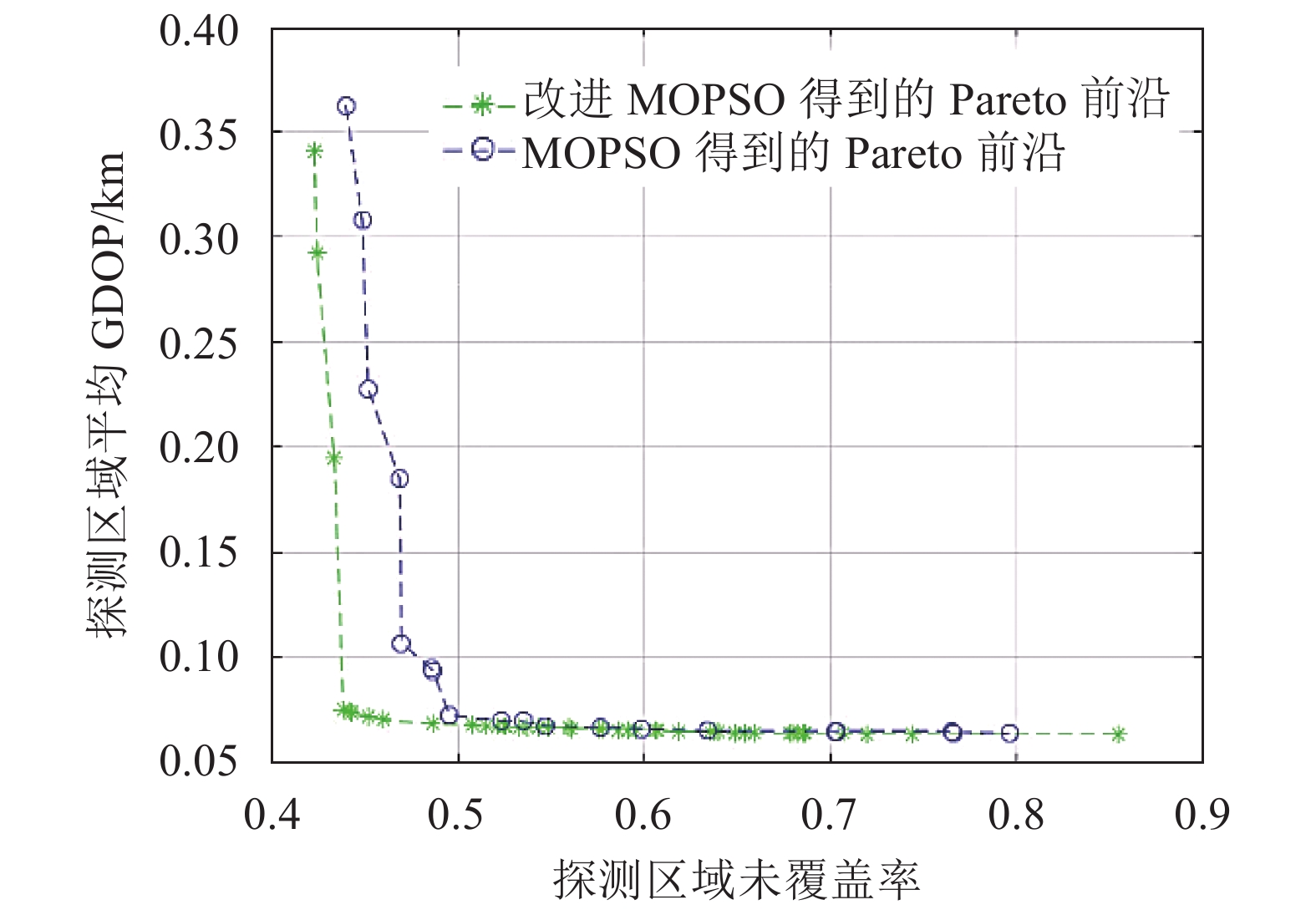
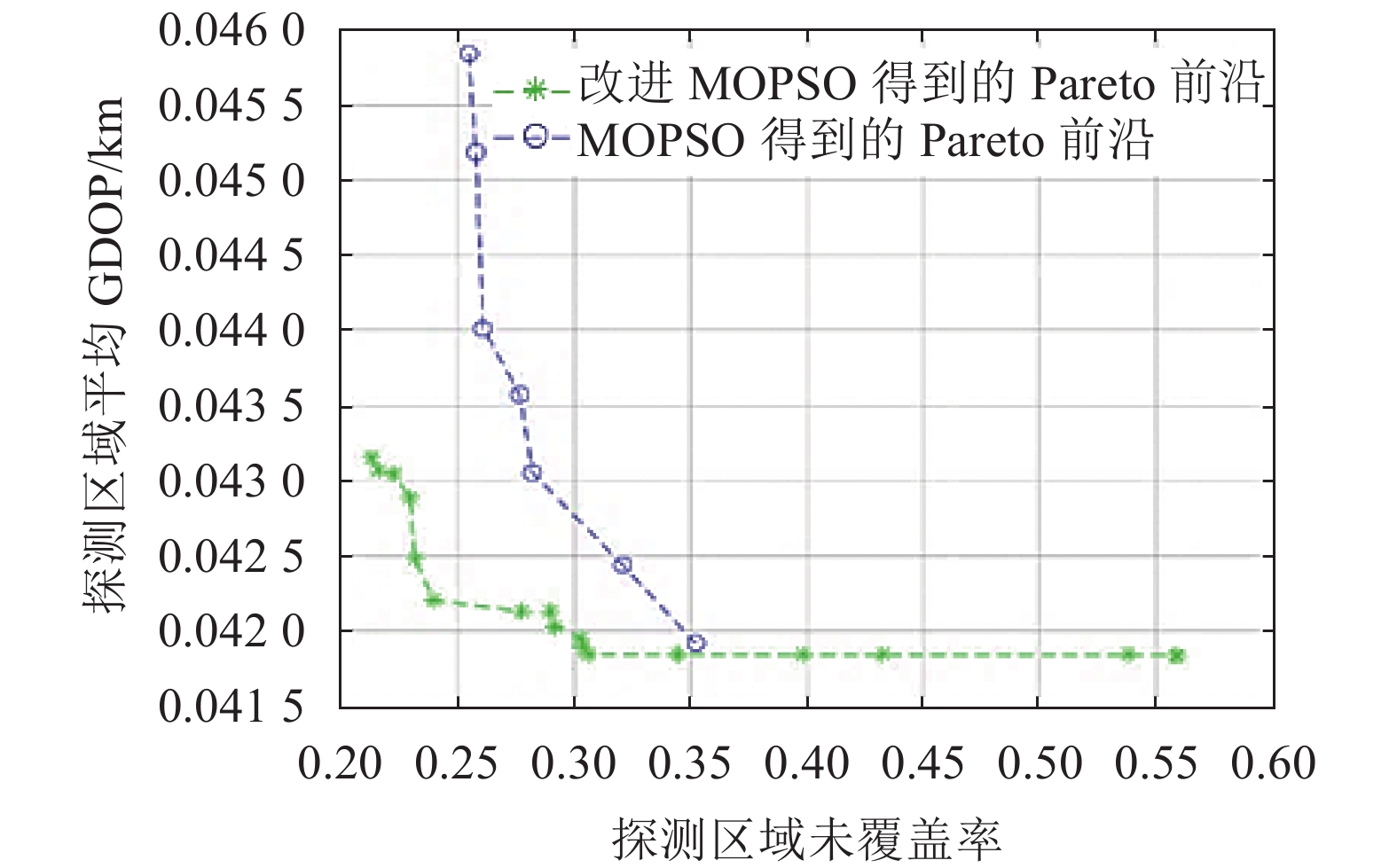
$80\;{\rm{km}} \times 80\;{\rm{km}}$ ;每个分辨单元设置为$2\;{\rm{km}} \times 2\;{\rm{km}}$ ;有效覆盖检测门限${\gamma _T}$ =0.8,虚警概率${\overline {{P}} _{{\rm{fa}}}}$ =${10^{ - 6}}$ 。对于改进的MOPSO算法,迭代次数为400,2个子种群,粒子数为40,自我学习因子${c_1} = 1.494\;45$ ,社会学习因子${c_2} = 1.494\;45$ ,种群学习因子${c_3} = 1.9$ ,惯性权重最大为0.9,最小为0.5。图5和图6为改进的MOPSO算法和标准MOPSO算法求解上述模型后得到的Pareto前沿对比。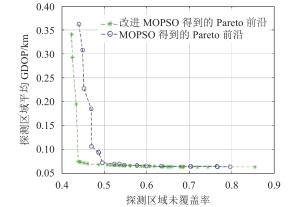
图 5 4个天线优化布局得到的Pareto前沿对比
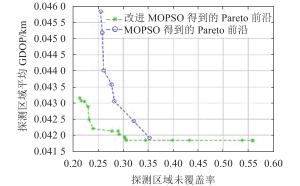
图 6 5个天线优化布局得到的Pareto前沿对比
从仿真图可以看出,无论4个天线节点还是5个天线节点,MOPSO算法得到的解均被改进的MOPSO算法得到的解支配;改进的MOPSO算法解的分布性和均匀性都优于MOPSO算法。Pareto前沿中每一个粒子代表一个布站方案,Pareto前沿可提供多种布站方案供决策者选择。综合上述分析表明,本文提出的改进的MOPSO算法优于基本的MOPSO算法,并且适用于雷达系统优化布局。
-
本文提出了一种改进的多目标粒子群算法,引入多种群增加解的多样性,使用反三角函数logistic映射对种群进行初始化,保持了解的均匀性和多样性,引入时变变异算子避免出现解的局部收敛。通过3个标准测试函数和雷达系统的实际应用,验证了算法的有效性。
Improved Multi-Objective Particle Swarm Optimization Algorithm and Its Application in Radar Station Distribution
-
摘要: 为更好地解决多目标问题,提高多目标优化算法的多样性和收敛性,提出一种改进的多目标粒子群优化算法。算法将种群分为多个子种群同时进行优化搜索并改进粒子速度更新公式,扩大Pareto最优解集的覆盖面;利用反三角函数logistic映射初始化种群,使初始种群分布更均匀;并使用时变变异方法对外部档案进行变异,避免陷入局部最优。通过与标准多目标粒子群优化算法(MOPSO)和NSGA-Ⅱ在标准测试函数ZDT1、ZDT2、KUR上的仿真实验对比,验证了该文提出的改进算法的有效性,并将其应用于雷达优化布站。
-
关键词:
- 反三角函数logistics映射 /
- 多目标粒子群优化算法 /
- 多种群搜索 /
- 雷达布站 /
- 时变变异
Abstract: In order to better solve multi-objective problem and improve the diversity and convergence of multi-objective optimization algorithms, an improved multi-objective particle swarm optimization algorithm is proposed. The algorithm divides the population into several subpopulations for optimization search and improves the particle velocity updating formula to expend the coverage of Pareto optimal solution set, and use inverse trigonometric logistic mapping to initialize the population to make the distribution of initial population more uniform. The time-varying variation method is used to change the external files to avoid local optimization. By comparing the performance of improved algorithm, standard multi-objective particle swarm optimization (MOPSO) algorithms and NSGA-Ⅱ on the standard test function, the effectiveness of the improved algorithm proposed in this paper is verified in an optimal radar distribution station. -
表 1 3种算法测试数据对比表
测试函数 优化算法 评价指标 GD SP IGD ZDT1 改进MOPSO $ {{\bf{4.0}} \times }{{{\bf{10}}}}^{{-{\bf{4}}}} $ $ {1.07 \times }{{10}}^{{-2}} $ $ {{\bf{7.2}} \times }{{{\bf{10}}}}^{{-{\bf{3}}}} $ MOPSO $ {9.0 \times }{{10}}^{{-4}} $ $ {{\bf{0.3}} \times }{{{\bf{10}}}}^{{-{\bf{2}}}} $ $ {8.6 \times }{{10}}^{{-3}} $ NAGA-Ⅱ $ {7.81 \times }{{10}}^{{-2}} $ $ {0.7 \times }{{10}}^{{-2}} $ $ {7.1 \times }{{10}}^{{-1}} $ ZDT2 改进MOPSO $ {{\bf{3.0}} \times }{{{\bf{10}}}}^{{-{\bf{4}}}} $ $ {{\bf{3.0}} \times }{{{\bf{10}}}}^{{-{\bf{4}}}} $ $ {{\bf{5.6}} \times }{{{\bf{10}}}}^{{-{\bf{3}}}} $ MOPSO $ {8.0 \times }{{10}}^{{-4}} $ $ {6.2 \times }{{10}}^{{-3}} $ $ {9.2 \times }{{10}}^{{-3}} $ NAGA-Ⅱ $ {9.12 \times }{{10}}^{{-2}} $ $ {7.0 \times }{{10}}^{{-3}} $ $ {10.2 \times }{{10}}^{{-1}} $ KUR 改进MOPSO $ {2.5 \times }{{10}}^{{-3}} $ $ {{\bf{2.65}} \times }{{{\bf{10}}}}^{{-{\bf{2}}}} $ $ {{\bf{3.5}} \times }{{{\bf{10}}}}^{{-{\bf{2}}}} $ MOPSO $ {{\bf{2.2}} \times }{{{\bf{10}}}}^{{-{\bf{3}}}} $ ${ { {2.2} } \times }{ { { {10} } } }^{ {-{ {2} } } }$ $ {4.7 \times }{{10}}^{{-2}} $ NAGA-Ⅱ $ {3.289 \times }{{10}}^{{-1}} $ $ {2.02 \times }{{10}}^{{-1}} $ $ {13.4 \times }{{10}}^{{-1}} $  下载: 导出CSV
下载: 导出CSV
-
[1] TRIPATHI P K, BANDYOPADHYAY S, PAL S K. Multi-objective particle swarm optimization with time variant inertia and acceleration coefficients[J]. Information Sciences, 2007, 177(22): 5033-5049. [2] RATNAWEERA A, HALGAMUGE S K, WATSON H C. Self-organizing hierarchical particle swarm optimizer with time-varying acceleration coefficients[J]. IEEE Transactions on Evolutionary Computation, 2004, 8(3): 240-255. [3] YANG S, LI M, LIU X, et al. A grid-based evolutionary algorithm for many-objective optimization[J]. IEEE Transactions on Evolutionary Computation, 2013, 17(5): 721-736. [4] HU W, YEN G G. Adaptive multiobjective particle swarm optimization based on parallel cell coordinate system[J]. IEEE Transactions on Evolutionary Computation, 2015, 19(1): 1-18. [5] ZENG G Q, CHEN J, LI L M, et al. An improved multi-objective population-based extremal optimization algorithm with polynomial mutation[J]. Information Sciences, 2016, 330(C): 49-73. [6] HU M, WEIR J D, WU T. An augmented multi-objective particle swarm optimizer for building cluster operation decisions[J]. Applied Soft Computing, 2014, 25(C): 347-359. [7] 杨景明, 侯新培, 崔慧慧, 等. 基于融合多策略改进的多目标粒子群优化算法[J]. 控制与决策, 2008, 33(2): 226-234. YANG Jing-ming, HOU Xin-pei, CUI Hui-hui, et al. Improved multi-objective particle swarm optimization algorithm based on integrating multiply strategies[J]. Control and Decision, 2008, 33(2): 226-234. [8] KUMAR R S, KONDAPANENI K, DIXIT V, et al. Multi-objective modeling of production and pollution routing problem with time window: A self-learning particle swarm optimization approach[J]. Computers & Industrial Engineering, 2015, DOI: 10.1016/j.cie.2015.07.003. [9] 王德成, 林辉. 一种基于轨道均匀分布的混沌遗传优化算法[J]. 计算机应用研究, 2009, 26(4): 1292-1293. doi: 10.3969/j.issn.1001-3695.2009.04.025 WANG De-cheng, LIN Hui. Chaos genetic optimization algorithm based on track uniform distribution[J]. Application Research of Computers, 2009, 26(4): 1292-1293. doi: 10.3969/j.issn.1001-3695.2009.04.025 [10] YANG Y, ZHANG T, YI W, et al. Multi-static radar power allocation for multi-stage stochastic task of missile interception[J]. IET Radar Sonar and Navigation, 2018, 12(5): 540-548. [11] 杨益川. 网络化雷达资源管理算法研究[D]. 成都: 电子科技大学, 2018. YANG Yi-chuan. Research on resource management algorithm for radar network[D]. Chengdu: University of Electronic and Technology of China, 2018. [12] WANG P, LI H, HIMED B. Moving target detection using distributed MIMO radar in clutter with nonhomogeneous power[J]. IEEE Transactions on Signal Processing, 2011, 59(10): 4809-4820. -

 点击查看大图
点击查看大图
图(6) / 表(1)
计量
- 文章访问数: 5588
- HTML全文浏览量: 1533
- PDF下载量: 72
- 被引次数: 0





























































































