 ISSN
ISSN 


 下载:
下载:
-
作战要素的协同融合是支撑体系作战、提高体系作战效率的重要环节[1-2]。如何将战场上高复杂性和高多样性的信息融合成高质量的作战情报和态势是侦察探测系统面临的难题之一。雷达是现代和未来战争中主要的信息获取手段,雷达组网能扩展信息获取范围、提高侦察系统的精度和可靠性、改善目标航迹和情报的稳定性[3-4]。但在实际应用中,因不同雷达输出数据的误差特性不同,现有融合模型无法充分发挥组网多雷达系统的优势,经常出现不必要的性能退化[5-7]。另外,当参与融合的雷达对象动态变化时,变化的新数据可能使得融合结果稳定性变差,数据分析发现,系统误差不一致或系统误差的变化是重要影响因素。
工程中一般采用检飞和标校等静态方法来减小雷达的系统误差,假定系统误差是稳定、慢变的。但在战场实际使用中,时间的积累、雷达运行环境的变化及敌方对抗等因素,特别是活动的安装平台(如舰船、飞机等)随时会产生或带来误差特性的系统性变化[8]。为了对系统误差进行在线补偿,文献[9-10]研究了系统误差在线估计算法,比较经典的方法有实时质量控制算法[11]、最小二乘算法[12-13]、广义最小二乘算法[14-15]、精确极大似然算法[16-18]、极大似然配准算法[19-20]、卡尔曼滤波算法[21-23]和神经网络算法[24-25]等。上述算法几乎都是利用多部雷达对同一目标多个时刻的原始点迹实现适配,需要预先把不同雷达对同一目标的原始量测在时空维度上关联起来。然而,在存在系统误差的条件下,各传感器原始点迹的系统误差与融合航迹的系统误差不具有一致性,将同一目标来自不同传感器的原始点迹与融合航迹进行预关联容易出现错误[26],由此可能导致航迹跟踪失败。因此,上述方法对于航迹融合比较有效,在点迹融合层面很难进行工程应用。为了绕过预关联这一困难,文献[27]研究了针对固定目标的系统误差估计方法;文献[28-29]研究了针对合作目标的系统误差估计方法,如已知飞机航线等信息;这类方法已知目标航迹信息,无需进行航迹预关联,对于非合作目标不再适用。目前少有文献研究多传感器系统误差在线估计算法在非合作目标场景下的工程化应用方法。
针对非合作目标场景下,多传感器系统误差估计在工程应用中容易出现预关联错误的问题,本文提出了μ-DECA(μ-dynamic estimation and compensation algorithm)算法,对各传感器之间的系统误差进行动态迭代估计,在预关联之前对各传感器的系统误差进行修正,使得各传感器原始点与融合航迹的系统误差具有一致性,保证多传感器点航迹关联的正确性。本文在大量分析实际工程系统数据特性的基础上,提出直接面向工程应用的多传感器相对误差特性动态估计模型和误差特性适配算法,针对性强、实用性好、适应性广。
-
一般将传感器测量误差分解为系统误差和随机误差,如:
$$\left\{ {\begin{aligned} & {{e_i} = {\mu _i} + {\sigma _i}\qquad i = 1,2, \cdots ,{n_t}}\\ & {{\mu _i} = \sum\limits_{j = 1}^m {{\mu _{mi}}} } \end{aligned}} \right. $$ (1) 式中,
${e_i}$ 代表第$i$ 个传感器对目标测量的总误差;${\mu _i}$ 代表第$i$ 个传感器对目标量测的系统误差;${\sigma _i}$ 代表第$i$ 个传感器对目标量测的随机误差,通常随机误差可以建模为零均值的高斯过程;${n_t}$ 代表传感器的个数;$\;{\mu _{mi}}$ 代表引起系统误差${\mu _i}$ 的$m$ 个因素。如标定残余引起的指向类误差、系统慢漂移等引起的慢变化的偏置类误差、相控阵扫描不一致引起的指向不一致误差、环境变化/多路径等引起的周期性余弦变化的系统性偏置误差、干扰、多目标或机动等引起的动态响应滞后类误差等。常用的传感器融合算法有加权平均融合算法、卡尔曼滤波、贝叶斯估计、统计决策理论、模糊推理及神经网络等方法。工程上通常采用加权平均融合算法。经对各种实测数据进行的统计发现,这种直接对不同系统误差和随机误差传感器测量值进行融合的方法存在以下问题:
1) 一般假定各传感器误差是随机独立的,但实际系统由于误差的存在,各传感器的数据与融合模型不完全匹配,融合输出质量不稳定;由于没有各传感器系统误差的先验知识,无法对各传感器输入数据的系统误差进行匹配,融合后的系统误差无法达到最优值,因而不能完全获得融合后提高精度、改善目标跟踪稳定性的好处;
2) 当参与融合的传感器种类、数量发生变化时,融合模型无法适应性的变化,融合后的系统误差特性会发生变化,即融合后系统误差特性的一致性和稳定性较差;
3) 如果部分传感器丢点或没有返回测量值,即在
$k + 1$ 时刻只有m个测量值,有:$$e(k + 1) = \sum\limits_{i = 1}^m {{w_i}(k + 1)} {e_i}(k + 1) \ne e(k) = \sum\limits_{i = 1}^n {{w_i}(k)} {e_i}(k)$$ (2) 即
$k + 1$ 时刻融合后测量误差的系统误差与$k$ 时刻融合后测量误差的系统误差不相等,系统误差的一致性、稳定性较差。因此,在对各传感器测量值融合前必须对传感器进行适配,保证适配后各传感器测量值的系统误差具有一致性。
-
假设雷达组网系统中,各雷达对目标的测量数据为:
$$\left\{ \begin{aligned} & {r_i} = r + {\mu _{ri}} + {\sigma _{ri}} \\ & {a_i} = a + {\mu _{ai}} + {\sigma _{ai}}\qquad i = 1,2, \cdots ,n \\ & {e_i} = e + {\mu _{ei}} + {\sigma _{ei}} \end{aligned} \right.$$ (3) 式中,
$({r_i},{a_i},{e_i})$ 代表第$i$ 个雷达对目标的测量值;$(r,a,e)$ 代表雷达运动航迹的真值;$({\mu _{ri}},{\mu _{ai}},{\mu _{ei}})$ 代表第$i$ 个雷达对目标量测的系统误差;$({\sigma _{ri}},{\sigma _{ai}},{\sigma _{ei}})$ 代表第$i$ 个雷达对目标量测的随机误差,通常随机误差可以建模为零均值的高斯过程;$n$ 代表雷达组网系统中雷达的个数。雷达系统误差适配的原理为:在xyz坐标系下,对(r,a,e)测量值系统误差进行转换以获得系统误差,建立适配补偿模型,在融合前将不同传感器的误差特性转换为相同或相一致的误差特性模型(理想情况下均值为零的高斯分布),以使融合输入数据与融合模型相匹配。
目标在各雷达坐标系中的真实位置
$ ({x_i},{y_i},{z_i})$ 为:$$ \left\{ \begin{aligned} & {x_i} = ({r_i} - {\mu _{ri}} - {\sigma _{ri}})\cos ({e_i} - {\mu _{ei}} - {\sigma _{ei}})\cos ({a_i} - {\mu _{ai}} - {\sigma _{ai}}) \\ & {y_i} = ({r_i} - {\mu _{ri}} - {\sigma _{ri}})\cos ({e_i} - {\mu _{ei}} - {\sigma _{ei}})\sin ({a_i} - {\mu _{ai}} - {\sigma _{ai}})\qquad i = 1,2, \cdots ,n \\ & {z_i} = ({r_i} - {\mu _{ri}} - {\sigma _{ri}})\sin ({e_i} - {\mu _{ei}} - {\sigma _{ei}}) \end{aligned} \right. $$ (4) 将真实位置在
$({\sigma _{ri}},{\sigma _{ai}},{\sigma _{ei}}) = [0,0,0]$ 点进行一阶Taylor展开,则:$$\left\{ \begin{aligned} & {x_i} = {\rm{ - cos(}}{a_i}{\rm{)cos(}}{e_i}{\rm{)}}{\mu _{ri}}{\rm{ + }}{r_i}{\rm{cos(}}{e_i}{\rm{)sin(}}{a_i}{\rm{)}}{\mu _{ai}}{\rm{ + }}{r_i}{\rm{cos(}}{a_i}{\rm{)sin(}}{e_i}{\rm{)}}{\mu _{ei}} + {\rm{ rcos(}}{a_i}{\rm{)cos(}}{e_i}{\rm{) + }}{v_{ri}} \\ & {y_i} = {\rm{ - cos(}}{e_i}{\rm{)sin(}}{a_i}{\rm{)}}{\mu _{ri}}{\rm{ - }}{r_i}{\rm{cos(}}{a_i}{\rm{)cos(}}{e_i}{\rm{)}}{\mu _{ai}}{\rm{ + }}{r_i}{\rm{sin(}}{a_i}{\rm{)sin(}}{e_i}{\rm{)}}{\mu _{ei}}{\rm{ + }}{r_i}{\rm{cos(}}{e_i}{\rm{)sin(}}{a_i}{\rm{) + }}{v_{ai}}\qquad i = 1,2, \cdots, n \\ & {z_i} = {\rm{ - sin(}}{e_i}{\rm{)}}{\mu _{ri}}{\rm{ - }}{r_i}{\rm{cos(}}{e_i}{\rm{)}}{\mu _{ei}}{\rm{ + }}{r_i}{\rm{sin(}}{e_i}{\rm{) + }}{v_{ei}} \end{aligned} \right.$$ (5) 即:
$${{{\mathit{\boldsymbol{Y}}}}_i} = {{{\mathit{\boldsymbol{A}}}}_i}{{{\mathit{\boldsymbol{X}}}}_i} + {{{\mathit{\boldsymbol{B}}}}_i} + {{{\mathit{\boldsymbol{V}}}}_i}\begin{array}{*{20}{c}} {} \end{array}i = 1,2 \cdots, n$$ (6) 式中,
$${{{\mathit{\boldsymbol{Y}}}}_i} = [{\begin{array}{*{20}{c}} {{x_i}}&{{y_i}}&{{z_i}]} ^{\rm{T}} \end{array}}$$ (7) $${{{\mathit{\boldsymbol{A}}}}_i} = \left[{\begin{array}{*{20}{c}} {\rm{ - cos}}\;{a_i}\;{\rm{cos}}\;{e_i}&{{r_i}{\rm{cos(}}{e_i}{\rm{)sin(}}{a_i}{\rm{)}}}&{{\rm{ }}{r_i}{\rm{cos(}}{a_i}{\rm{)sin(}}{e_i}{\rm{)}}} \\ {\rm{ - cos}}\;{e_i}\;{\rm{sin}}\;{a_i}&{{\rm{ - }}{r_i}{\rm{cos(}}{a_i}{\rm{)cos(}}{e_i}{\rm{)}}}&{{r_i}{\rm{sin(}}{a_i}{\rm{)sin(}}{e_i}{\rm{)}}} \\ {\rm{ - sin}}\;{e_i}&0&{{\rm{ - }}{r_i}{\rm{cos(}}{e_i}{\rm{)}}} \end{array}}\right]$$ (8) $${{{\mathit{\boldsymbol{X}}}}_i} = [{\begin{array}{*{20}{c}} {{\mu _{ri}}}&{{\mu _{ai}}}&{{\mu _{ei}}]} ^{\rm{T}} \end{array}}$$ (9) $${{{\mathit{\boldsymbol{B}}}}_i} = {\left[ {\begin{array}{*{20}{c}} {{r_i}{\rm{cos}}\;{a_i}\;{\rm{cos}}\;{e_i}\;{\rm{}}}&{{r_i}{\rm{cos}}\;{e_i}\;{\rm{sin}}\;{a_i}\;{\rm{}}}&{{r_i}{\rm{sin}}\;{e_i}\;{\rm{}}} \end{array}} \right]^{\rm{T}}}$$ (10) $${{{\mathit{\boldsymbol{V}}}}_i} = [{\begin{array}{*{20}{c}} {{v_{ri}}}&{{v_{ai}}}&{{v_{ei}}]} ^{\rm{T}} \end{array}}$$ (11) 将各雷达数据转换到统一的全局坐标系下,可得:
$${{{\mathit{\boldsymbol{Y}}}}_{gi}} = {{{\mathit{\boldsymbol{T}}}}_i}{Y_i} + {{{\mathit{\boldsymbol{Y}}}}_{0i}}\begin{array}{*{20}{c}} {} \end{array}i = 1 ,2,\cdots ,n$$ (12) 式中,
${Y_{gi}}$ 代表第$i$ 个雷达在全局坐标系下的数据;${T_i}$ 代表第$i$ 个雷达坐标系相对全局坐标系的转换矩阵;${{{\mathit{\boldsymbol{Y}}}}_{0i}}$ 代表第$i$ 个雷达局部坐标系原点在全局坐标系下的坐标。在对多传感器相对系统误差进行估计时,首先需选择系统误差较小的传感器作为基准传感器,且假设基准传感器的系统误差为零,即
${X_r} = 0$ ,由此估计其他传感器和基准传感器之间的相对系统误差。对于同一目标,其在各传感器中的真实位置应该是相等的,即:
$$\begin{array}{*{20}{c}} {{{{\mathit{\boldsymbol{Y}}}}_{gi}} = {{{\mathit{\boldsymbol{Y}}}}_{gr}}}\\ { \Rightarrow {{{\mathit{\boldsymbol{T}}}}_i}{{{\mathit{\boldsymbol{A}}}}_i}{{{\mathit{\boldsymbol{X}}}}_i} + {{{\mathit{\boldsymbol{T}}}}_i}{{{\mathit{\boldsymbol{B}}}}_i} + {{{\mathit{\boldsymbol{T}}}}_i}{{{\mathit{\boldsymbol{V}}}}_i} + {{{\mathit{\boldsymbol{Y}}}}_{0i}} = {{{\mathit{\boldsymbol{T}}}}_r}{{{\mathit{\boldsymbol{B}}}}_r} + {{{\mathit{\boldsymbol{T}}}}_r}{{{\mathit{\boldsymbol{V}}}}_r} + {{{\mathit{\boldsymbol{Y}}}}_{0r}}}\\ { \Rightarrow {{{\mathit{\boldsymbol{T}}}}_i}{{{\mathit{\boldsymbol{B}}}}_i} - {{{\mathit{\boldsymbol{T}}}}_r}{{{\mathit{\boldsymbol{B}}}}_r} + {{{\mathit{\boldsymbol{Y}}}}_{0i}} - {{{\mathit{\boldsymbol{Y}}}}_{0r}} = - {{{\mathit{\boldsymbol{T}}}}_i}{{{\mathit{\boldsymbol{A}}}}_i}{{{\mathit{\boldsymbol{X}}}}_i} - {{{\mathit{\boldsymbol{T}}}}_i}{{{\mathit{\boldsymbol{V}}}}_i} + {{{\mathit{\boldsymbol{T}}}}_r}{{{\mathit{\boldsymbol{V}}}}_r}} \end{array}$$ (13) 由此整理得:
$${{\mathit{\boldsymbol{B }}}}{{ = }}{{\mathit{\boldsymbol{AX}}}}{{ + }}{{\mathit{\boldsymbol{V}}}}$$ (14) 式中,
$$\begin{split} & {{{\mathit{\boldsymbol{B}}}} = {{{\mathit{\boldsymbol{T}}}}_i}{{{\mathit{\boldsymbol{B}}}}_i} + {{{\mathit{\boldsymbol{Y}}}}_{0i}} - {{{\mathit{\boldsymbol{T}}}}_j}{{{\mathit{\boldsymbol{B}}}}_j} - {{{\mathit{\boldsymbol{Y}}}}_{0j}}}\\ &\qquad\;\;\; {{{\mathit{\boldsymbol{A}}}} = - {{{\mathit{\boldsymbol{T}}}}_i}{{{\mathit{\boldsymbol{A}}}}_i}}\\ &\qquad\quad\; {{{\mathit{\boldsymbol{X}}}} = {{{\mathit{\boldsymbol{X}}}}_i}}\\ &\qquad {{{\mathit{\boldsymbol{V}}}} = \left[ {\begin{array}{*{20}{c}} {{{{\mathit{\boldsymbol{T}}}}_i}{{{\mathit{\boldsymbol{V}}}}_i}}\\ {{{{\mathit{\boldsymbol{T}}}}_j}{{{\mathit{\boldsymbol{V}}}}_j}} \end{array}} \right]} \end{split}$$ (15) 对于上述方程,为了减小随机误差对估计精度的影响,需联合多个测量的数据来对系统误差进行估计,即:
$$\left[ {\begin{array}{*{20}{c}} {{{\mathit{\boldsymbol{B}}}}(1)}\\ {{{\mathit{\boldsymbol{B}}}}(2)}\\ \vdots\\ {{{\mathit{\boldsymbol{B}}}}(m)} \end{array}} \right] = \left[ {\begin{array}{*{20}{c}} {{{\mathit{\boldsymbol{A}}}}(1)}\\ {{{\mathit{\boldsymbol{A}}}}(2)}\\ \vdots\\ {{{\mathit{\boldsymbol{A}}}}(m)} \end{array}} \right]{{\mathit{\boldsymbol{X}}}} + \left[ {\begin{array}{*{20}{c}} {{{\mathit{\boldsymbol{V}}}}(1)}\\ {{{\mathit{\boldsymbol{V}}}}(2)}\\ \vdots\\ {{{\mathit{\boldsymbol{V}}}}(m)} \end{array}} \right]$$ (16) 式中,
$m$ 代表测量数据的个数。 -
对于上述模型,可以采用实时质量控制算法[11]、最小二乘算法[12]和广义最小二乘算法[15]等方法对各传感器之间的相对系统误差进行估计。在系统误差慢变的情况下,上述算法均能够对其进行精确估计。由于最小二乘算法在工程应用上已经比较成熟,本文采用最小二乘算法来估计传感器系统误差,由此得到:
$${{\mathit{\boldsymbol{X}}}} = {({{{\mathit{\boldsymbol{A}}}}^{\rm{T}}}{{\mathit{\boldsymbol{A}}}})^{ - 1}}{{{\mathit{\boldsymbol{A}}}}^{\rm{T}}}{{\mathit{\boldsymbol{B}}}}$$ (17) 根据上述方法,可以对各传感器测量数据的相对系统误差进行估计,由此对其进行一致性匹配补偿,再对补偿后的测量数据进行传感器融合处理。
-
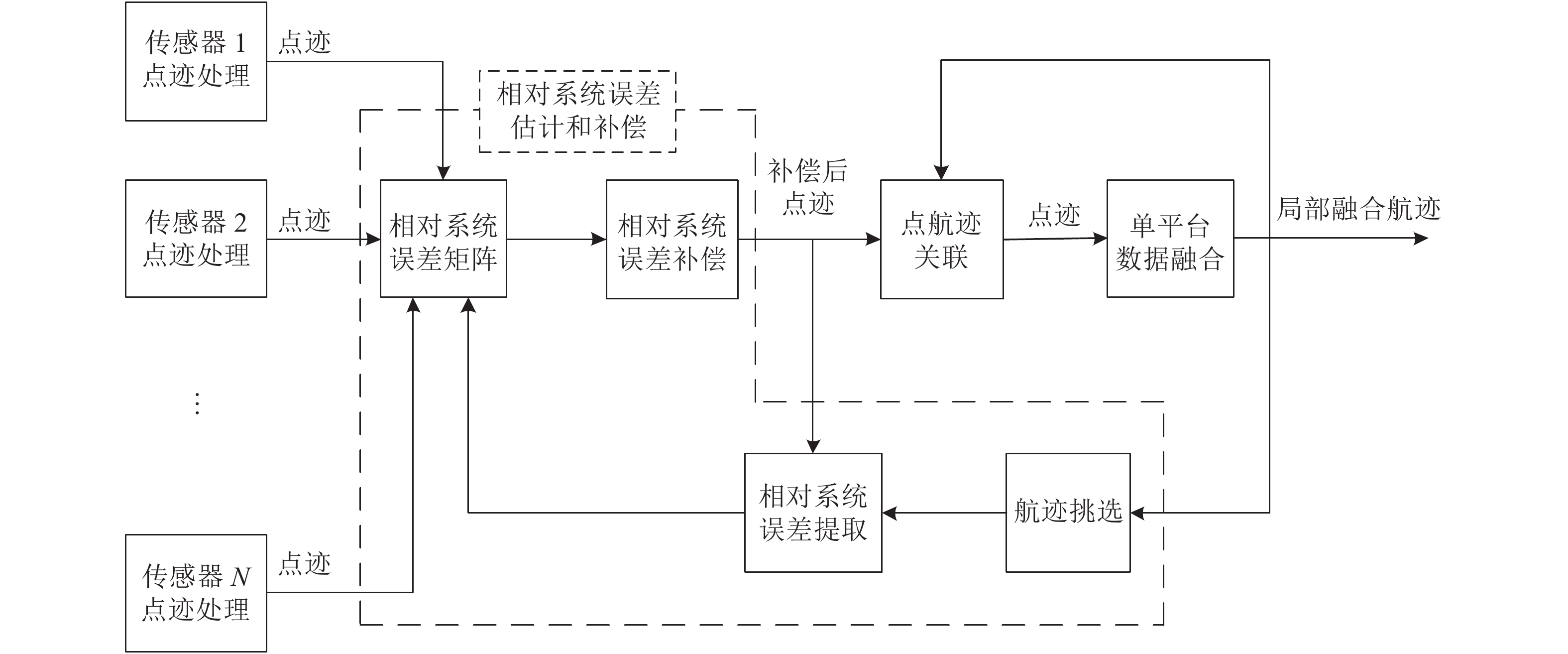
对于上文给出的多传感器相对系统误差估计算法,在工程应用过程中需要预先把不同雷达对同一目标的原始量测在时空维度上关联起来,对同一目标关联成功的点迹,进行相对误差估计,然后再对点迹进行相对误差补偿。但是,在存在系统误差的条件下,各传感器原始点迹的系统误差与融合航迹的系统误差不具有一致性,将同一目标来自不同传感器的原始点迹与融合航迹进行预关联容易出现错误,引起相对误差估计和补偿错误。因此,针对上述工程应用困难,本文设计了如图1所示的多传感器相对系统误差动态适配性处理算法,该方法能够克服预关联的困难,满足工程化需求。

图 1 短基线多传感器融合示意图
图1虚线框给出了多传感器相对系统误差动态迭代估计与补偿算法示意图。其中的相对系统误差提取和相对系统误差补偿模块位于一个动态迭代闭环中,根据动态迭代得到的相对系统误差矩阵在点航迹关联前对各传感器的系统误差进行补偿,由此保证各传感器点迹与融合航迹的系统误差近似具有一致性,进而保证了点航迹关联的正确性,克服了预关联的困难。同时,对于系统误差补偿后的点迹,如果有剩余的系统误差,重新对剩余的相对系统误差进行估计,且对相对系统误差矩阵进行迭代修正。根据图1描述的短基线多传感器融合示意图,可以看出本文提出的μ-DECA算法同实际工程的静态装订方法相比较,不同点在于本文算法引入了相对系统误差动态迭代估计与补偿模块,该模块通过对各传感器之间的相对系统误差进行实时动态迭代估计与补偿,减小了时间积累、传感器运行环境以及敌方对抗等因素对传感器系统误差的影响,大幅提高了多传感器融合的精度和稳定性,改善了多传感器融合系统输出点迹的质量。
基于上述多传感器融合框架,在融合前对同一目标的观测数据自动采用μ-DECA算法进行处理,使进入融合处理前的所有传感器数据误差特性趋于一致。
-
为了验证本文算法的普适性,分别采用某型同平面安装航管一二次雷达、某一船载平台上非同一平面两部雷达和两部短基线部署的双波段雷达等不同场景实测数据进行验证。
场景一:船载平台实测数据
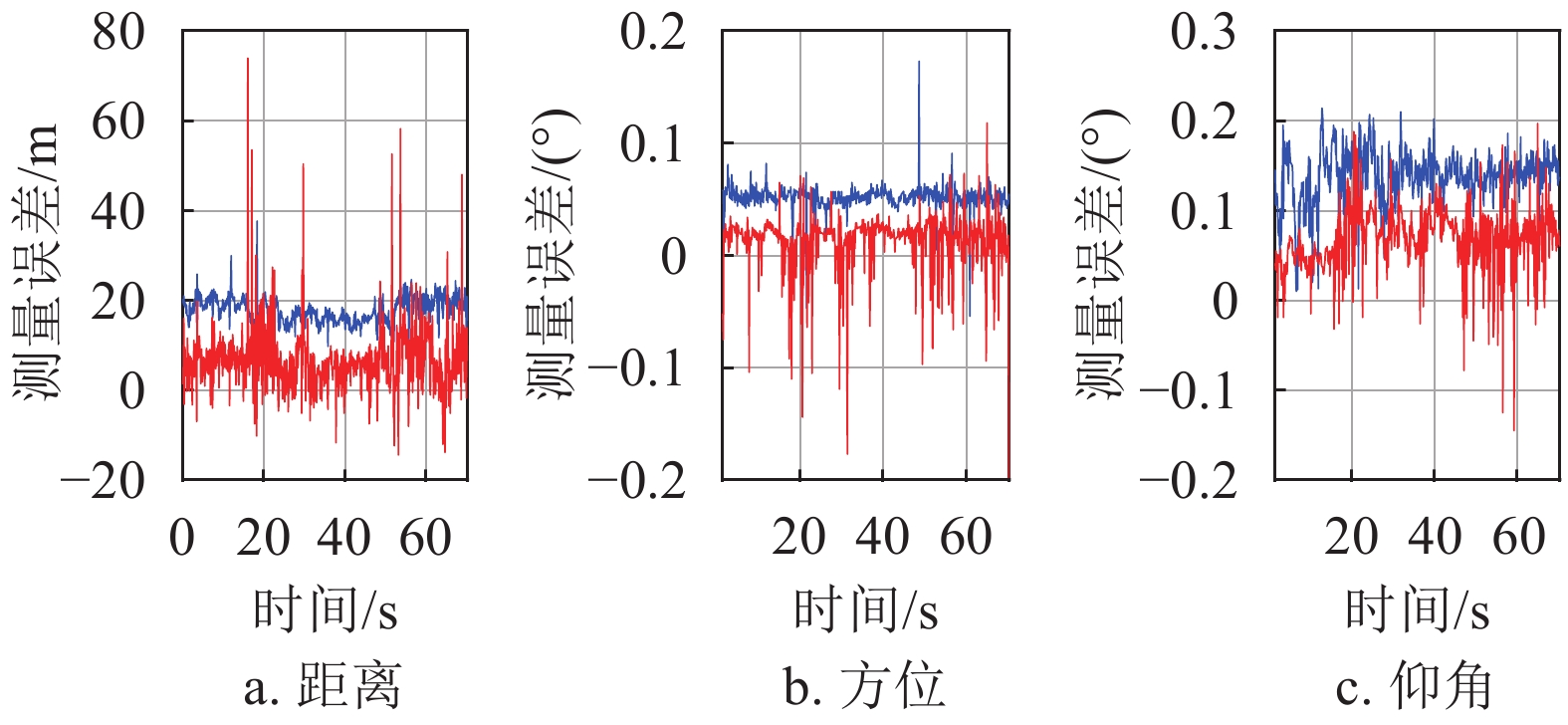
对于两部0.1 s数据率的雷达,其距离、方位、仰角测量误差如图2所示。图中蓝色曲线为相对系统误差估计值,红色曲线为相对系统误差真值。
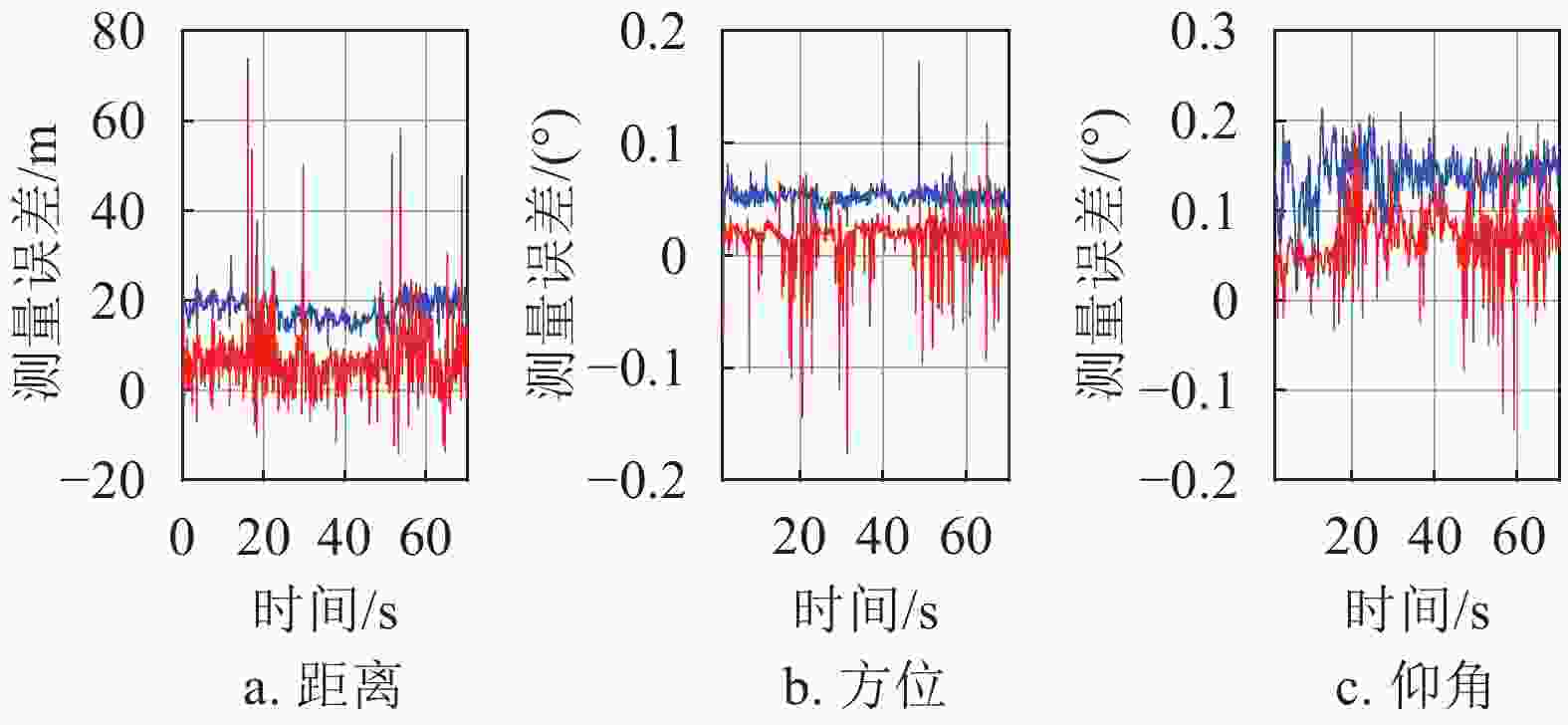
图 2 舰用平台测量误差
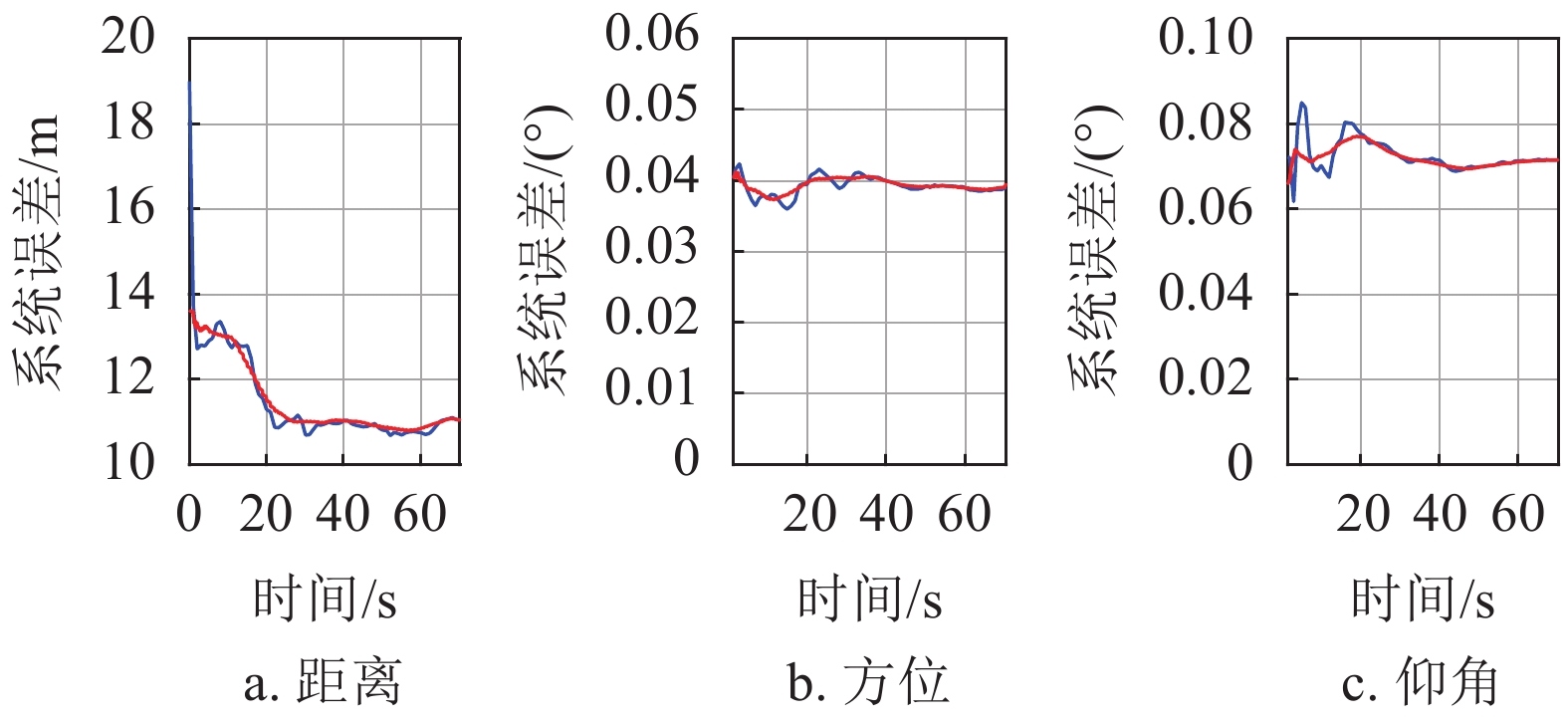
根据图2的误差曲线可以看出,两部雷达测量误差的均值不重合,即两部雷达的相对系统误差不为零,采用本文算法对其相对系统误差进行估计,估计结果如图3所示。图中蓝色曲线为相对系统误差估计值,红色曲线为相对系统误差真值。
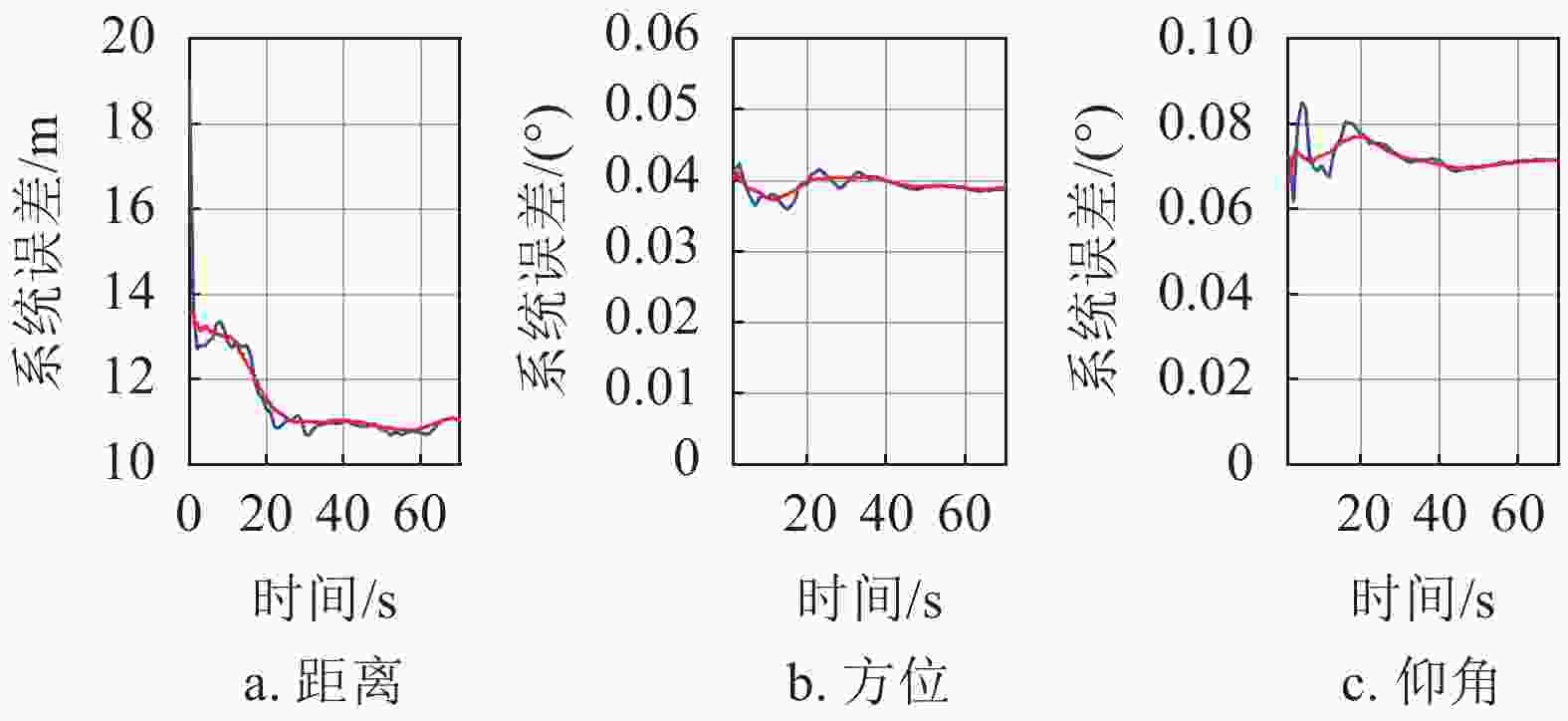
图 3 舰用平台相对系统误差估计
根据图3的相对系统误差估计结果可以看出,本文提出的估计算法具有较快的收敛性,相对系统误差估计值能够在3 s内收敛到真实值附近。另外,估计的相对系统误差值具有较高的精度,估计误差最大值仅为6%。由此验证了估计算法的有效性。
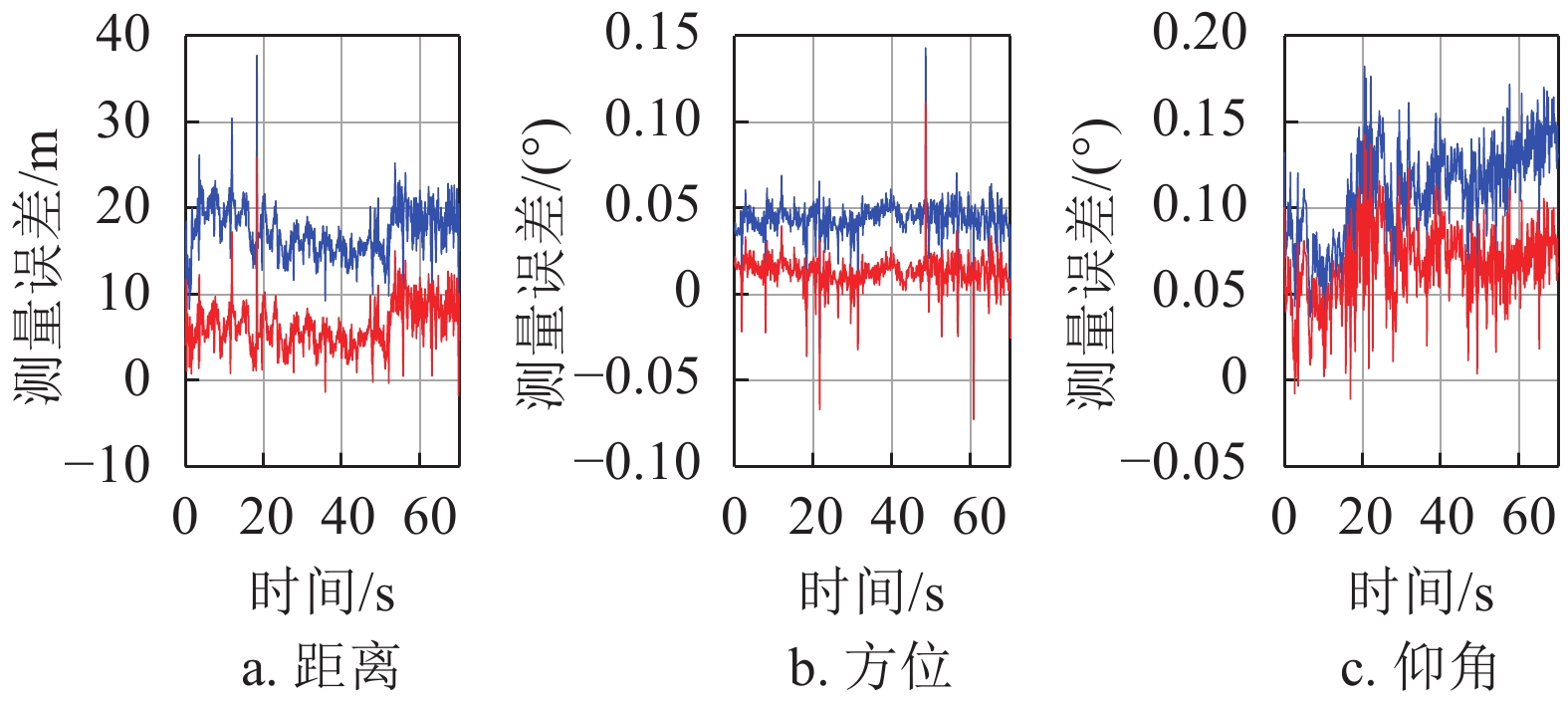
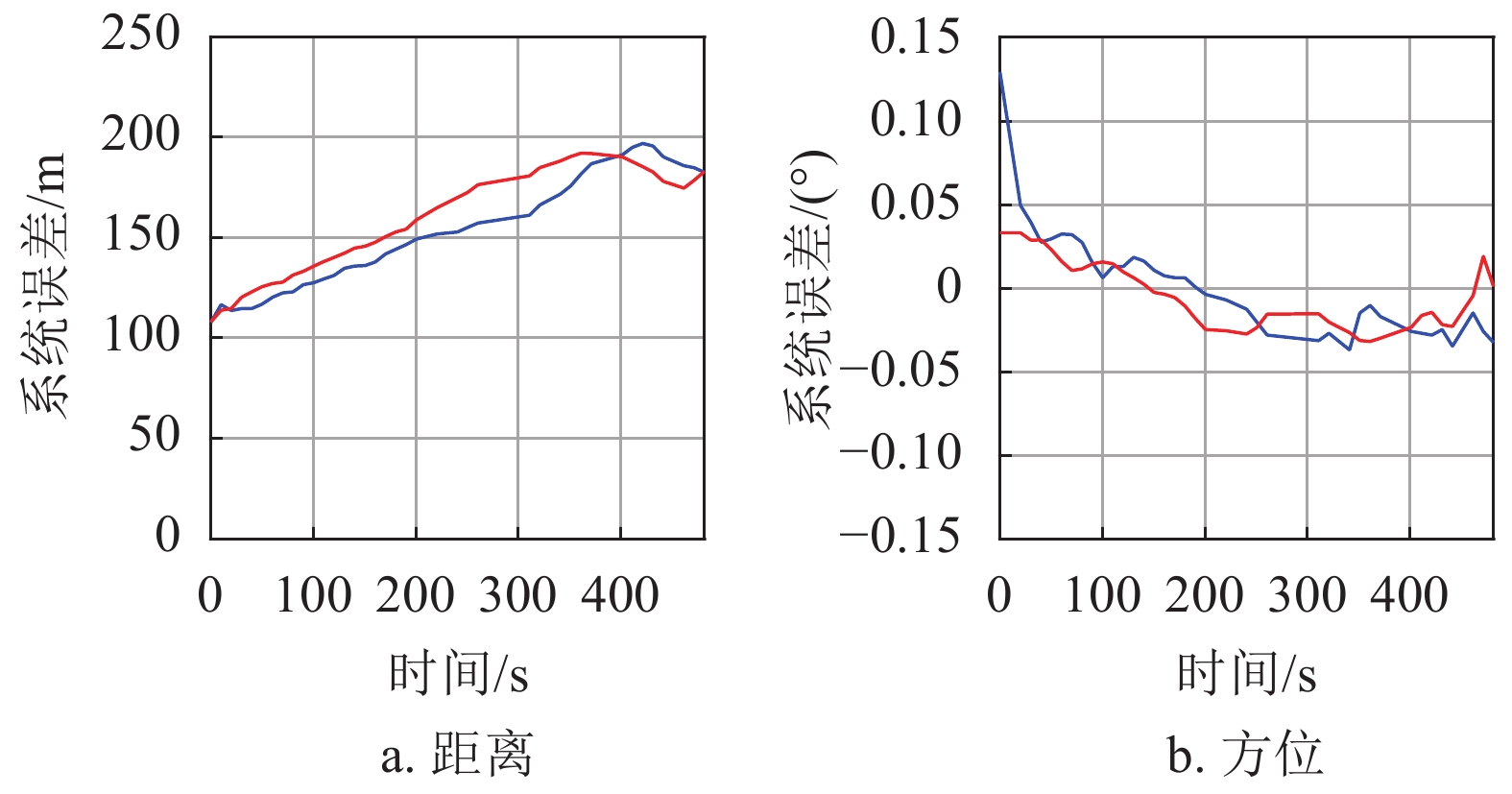
基于图3中的相对误差估计值,对两部雷达的测量值进行融合,将融合结果与文献[30]中融合算法的融合结果进行对比,对比曲线如图4所示。图中蓝色曲线为文献[30]中研究方法,红色曲线为本文研究方法。
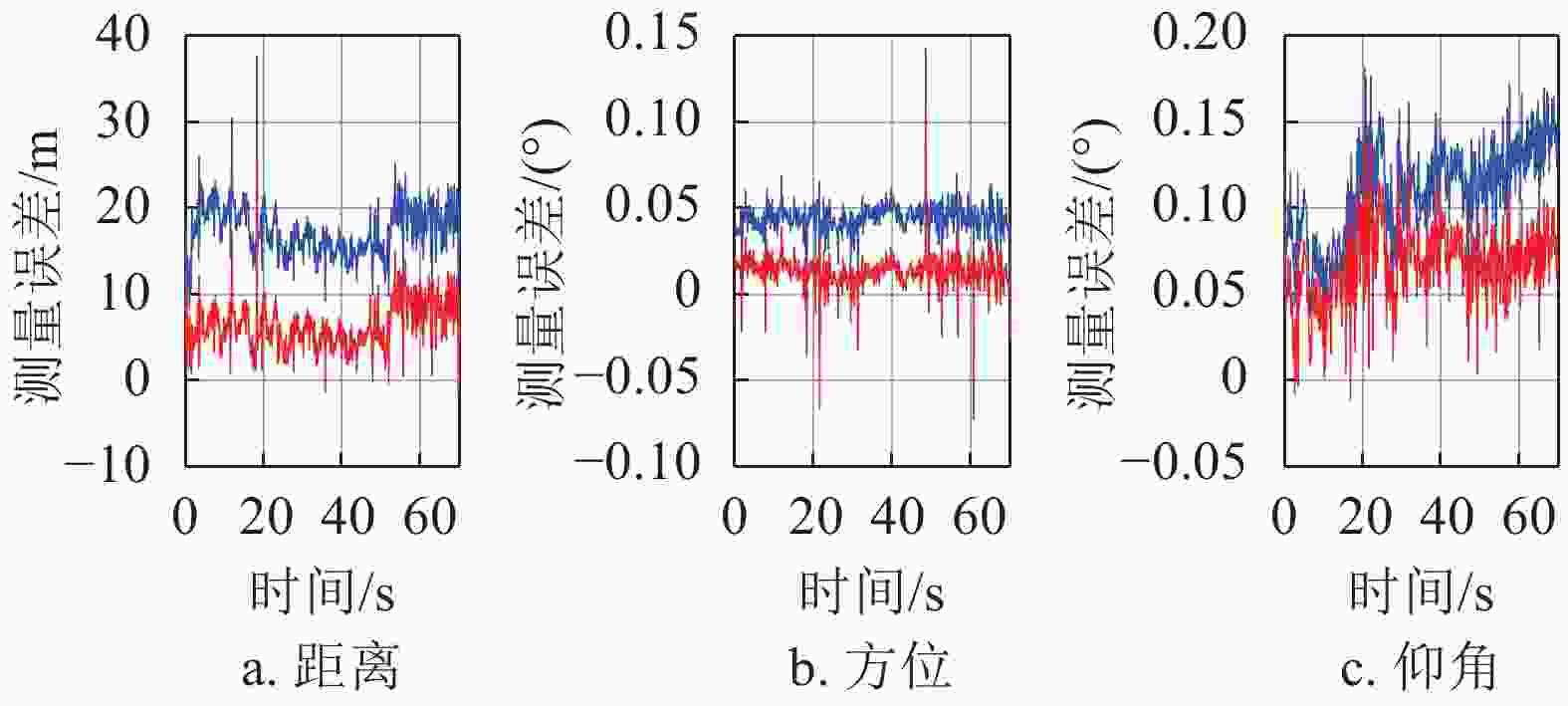
图 4 舰用平台融合点迹误差对比
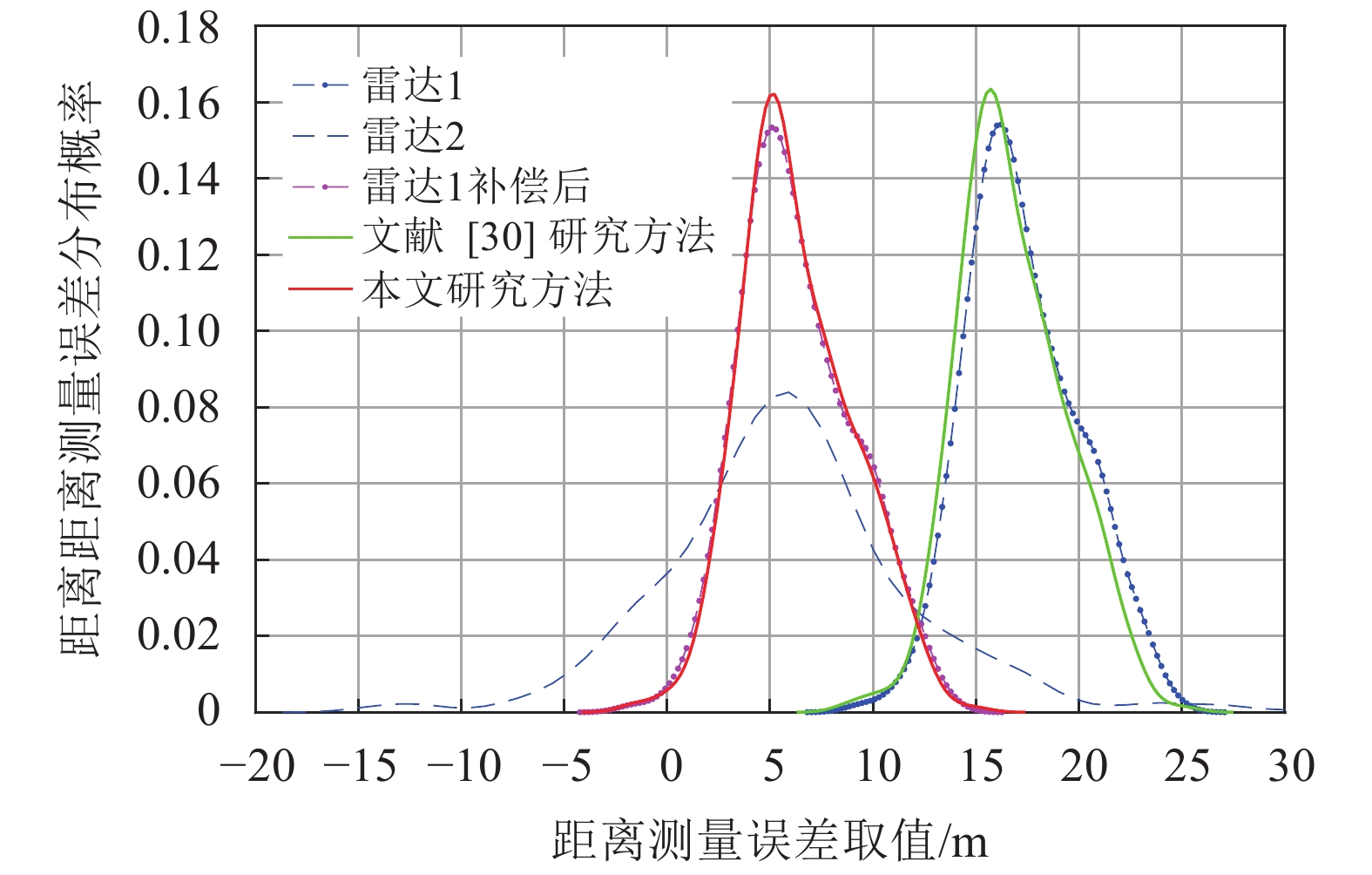
从上述实测数据验证效果可明显看出,本文提出的μ-DECA模型和算法能够较好地补偿雷达1和雷达2的相对系统误差,融合点迹的系统误差与两部雷达系统误差的最小值相当,由此提高了融合点迹的精度。同文献[30]中的融合算法相比较,本文方法较好地补偿了相对系统误差,具有较高的精度。在此基础上,本文以距离维测量误差为例,采用概率密度统计的方法来比较本文方法的优势,如图5所示。可以看出,雷达1和雷达2测量误差特性不一致。图5中绿色曲线代表采用本文算法以雷达2为基准对雷达1系统误差进行补偿后点迹误差的概率分布图,其系统误差与雷达2的系统误差相当。对补偿后的点迹进行融合,融合点迹误差的概率分布图如图中红线所示,其均值与雷达1和雷达2测量误差的最小值相等,具有较高的精度。采用文献[30]研究方法对上述点迹进行融合,系统误差较大,由此体现了本文算法的优势。

图 5 距离维度点迹误差概率分布图
场景二:航管一二次雷达实测数据
基于数据率为1 s的航管数据,对距离和方位测量值相对系统误差估计如图6所示。图中蓝色曲线为相对系统误差估计值,红色曲线为相对系统误差真值。
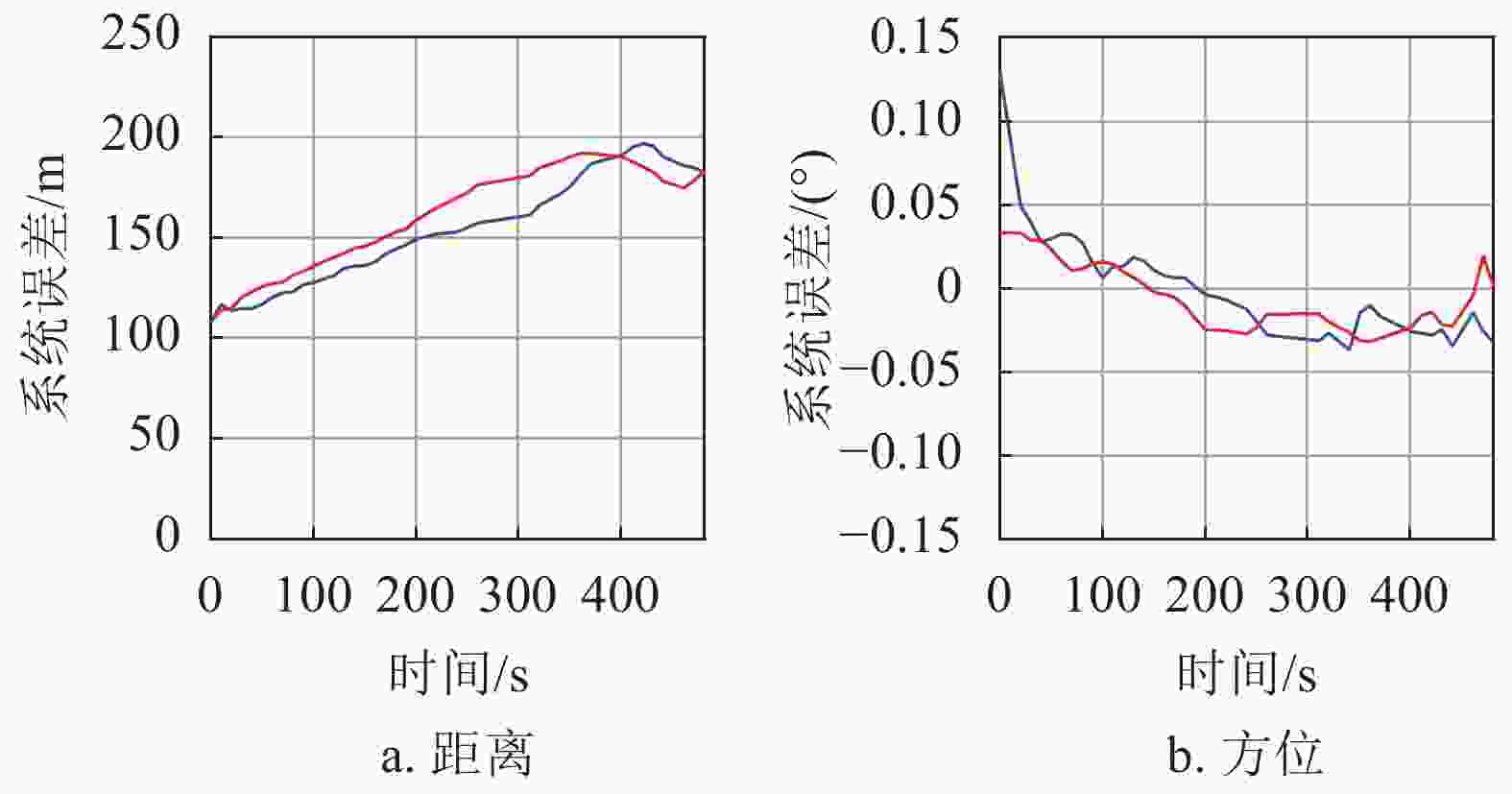
图 6 航管距离和方位的相对系统误差估计值
由此可以看出,μ-DECA算法具有较快的收敛性,且能够较好地估计一次和二次波段的相对系统误差。
场景三:短基线的两部雷达实测数据
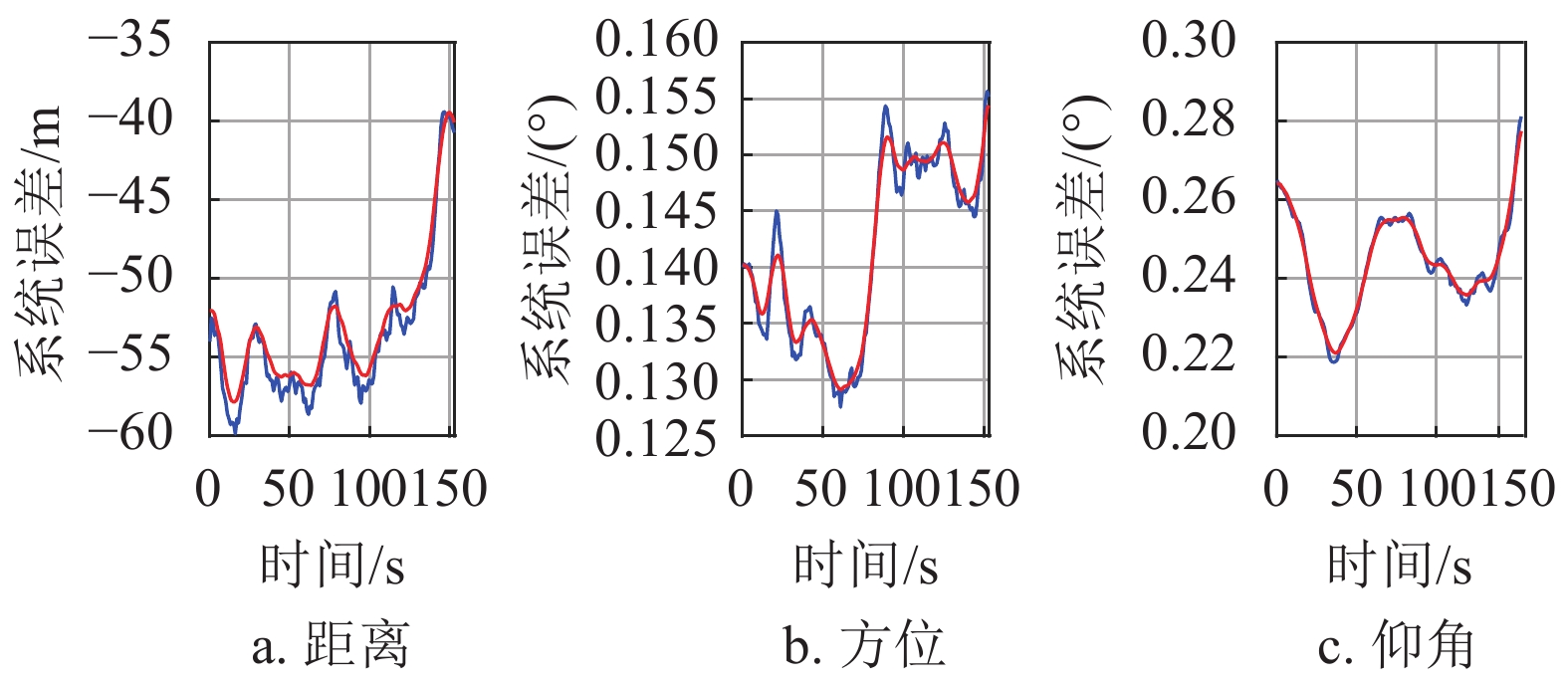
基于数据率为0.2 s双波段雷达数据,距离、方位和仰角测量值相对系统误差估计如图7所示,图中蓝色曲线为相对系统误差估计值,红色曲线为相对系统误差真值。
对于上述实测数据验证效果,图7代表雷达1和雷达2在距离、方位和仰角维度上的相对测量误差值以及估计的相对系统误差。由此可以看出,μ-DECA算法具有较快的收敛性,且能够较好地估计两部雷达的相对系统误差。

图 7 短基线双波段雷达距离的相对误差估计值
-
本文提出了一种面向工程应用的多传感器相对系统误差实时估计模型和误差特性动态适配性处理算法(μ-DECA算法),可以较好地解决多传感器网络中各传感器误差特性不一致带来的融合结果不稳定的问题。通过不同设备多个场景的实测数据验证了该算法能够提高多传感器融合的精度和稳定性,具有很强的工程应用性。该算法有望应用到跨平台分布式协同探测场合,具有很好的扩展前景。
A Dynamic Estimation and Compensation Algorithm for Matching the Error Characteristics of Multi-Sensor System
-
摘要: 针对非合作目标场景下多传感器系统误差估计的工程应用问题,提出了一种面向工程应用的多传感器相对系统误差动态估计与适配性处理算法(μ-DECA),提高了多传感器融合系统的精度和稳定性。建立了系统误差实时估计模型,设计了一种多传感器相对系统误差动态迭代估计与补偿算法,使得各传感器原始点迹和融合航迹的误差特性趋于一致,克服了多传感器系统点航迹关联的困难,保证了相对系统误差估计与补偿的正确性。通过不同设备多个场景的实测数据,验证了该方法能够补偿环境等因素对传感器系统误差的影响,提高了多传感器融合的精度和稳定性,改善了多传感器融合系统输出点迹的质量。Abstract: In this paper, a dynamic estimation and compensation algorithm for matching the error characteristics of multi-sensor system is proposed to solve the engineering application problem of the multi-sensor system error estimation in the non-cooperative target scenario. A real-time estimation model of system errors is established and a dynamic iterative estimation and compensation algorithm is designed, which makes the error characteristics of the original plot and the fusion track to be consistent, overcomes the difficulty of plot-track association in the multi-sensor system, and ensures the correctness of relative system error estimation and compensation. The measured data from multiple scenes of different devices show that this method can improve the accuracy and stability of multi-sensor fusion system, so as to improve the plot quality of multi-sensor fusion system.
-
[1] 王诗鑫. 雷达信号协同分布侦察理论研究[M]. 成都: 电子科技大学, 2020. WANG Shi-xin. Research on radar signal cooperative distributed reconnaissance theory[M]. Chengdu: University of Electronic Science and Technology of China, 2020. [2] 陈希, 杨兵, 孙志豪. 基于灰色聚类的信息作战指挥协同效能评估[J]. 火力与指挥控制, 2020, 45(4): 71-76. doi: 10.3969/j.issn.1002-0640.2020.04.013 CHEN Xi, YANG Bing, SUN Zhi-hao. Combat command coordination effectiveness evaluation of information operation command based on grey clustering[J]. Fire Control & Command Control, 2020, 45(4): 71-76. doi: 10.3969/j.issn.1002-0640.2020.04.013 [3] ANDRÉ D, BENEDIKT S, JONATHAN B, et al. Phase noise mitigation for multistatic FMCW radar sensor networks using carrier transmission[J]. IEEE Microwave and Wireless Components Letters, 2018, 28(12): 1143-1145. doi: 10.1109/LMWC.2018.2878983 [4] PING R, ANDREA M, MARINA P. Performance tradeoffs of joint radar-communication networks[J]. IEEE Wireless Communications Letters, 2019, 8(1): 165-168. doi: 10.1109/LWC.2018.2865360 [5] LI M Z, JING Z L, PAN H, et al. Joint registration and multi-target tracking based on labelled random finite set and expectation maximization[J]. IET Radar, Sonar & Navigation, 2018, 12(3): 312-322. [6] LIANG C. A symmetry-based method for LiDAR point[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2018, 11(1): 285-299. doi: 10.1109/JSTARS.2017.2752765 [7] WU W Z, HU P J, XU S Y, et al. Image registration for InISAR based on joint translational motion compensation[J]. IET Radar, Sonar & Navigation, 2017, 11(10): 1597-1603. [8] 宋文彬. 传感器数据空间配准算法研究进展[J]. 传感器与微系统, 2012, 31(8): 5-8. doi: 10.3969/j.issn.1000-9787.2012.08.002 SONG Wen-bin. Research progress of spatial registration algorithms for sensor data[J]. Transducer and Microsystem Technologies, 2012, 31(8): 5-8. doi: 10.3969/j.issn.1000-9787.2012.08.002 [9] 段芳芳, 韩星, 王琳, 等. 机载雷达数据融合的算法和实现[J]. 火控雷达技术, 2019, 48(4): 41-45. DUAN Fang-fang, HAN Xing, WANG Lin, et al. Algorithm design and implementation of a data fusion system for airborne radars[J]. Fire Control Radar Technology, 2019, 48(4): 41-45. [10] 常超伟, 王世锋, 李丽君, 等. 一种基于最优在线无偏估计的空间配准方法[J]. 火力与指挥控制, 2019, 44(10): 158-162. doi: 10.3969/j.issn.1002-0640.2019.10.031 CHANG Chao-wei, WANG shi-feng, LI Li-jun, et al. An approach for space registration based on nonparametric estimation[J]. Fire Control & Command Control, 2019, 44(10): 158-162. doi: 10.3969/j.issn.1002-0640.2019.10.031 [11] COSTA B J. The sage real quality control fraction and its interface with BUIC II /BUIC III[R]. [S.l.]: MITRE Corporation, 1966. [12] FORTUNATI S, GINI F, GRECO M S, et al. Least squares estimation and hybrid Cramér-Rao lower bound for absolute sensor registration[C]//Tyrrhenian Workshop on Advances in Radar and Remote Sensing: From Earth Observation to Homeland Security, Tywrrs. Naples, Italy: IEEE, 2012: 30-35. [13] 米芳彬, 徐小刚, 梁健. 基于有限记忆最小二乘的雷达误差配准算法[J]. 无线电工程, 2016, 46(2): 65-68. doi: 10.3969/j.issn.1003-3106.2016.02.16 MI Fang-bin, XU Xiao-gang, LIANG Jian. An algorithm of radar registration based on finite memory least squares[J]. Radio Engineering, 2016, 46(2): 65-68. doi: 10.3969/j.issn.1003-3106.2016.02.16 [14] 李家强, 赵春艳, 陈金立, 等. WGS-84坐标系下改进的广义最小二乘配准算法[J]. 上海交通大学学报, 2016, 50(5): 771-775. LI Jia-qiang, ZHAO Chun-yan, CHEN Jin-li, et al. A modified generalized least square registration algorithm on WGS-84 coordinate[J]. Journal of Shanghai Jiaotong University, 2016, 50(5): 771-775. [15] 张建业, 潘泉, 张鹏, 等. 多雷达组网系统空间误差分布与配准算法仿真[J]. 传感技术学报, 2007, 20(1): 198-201. doi: 10.3969/j.issn.1004-1699.2007.01.044 ZHANG Jian-ye, PAN Quan, ZHANG Peng, et al. Space errors distribution and registration algorithm simulation of the multi-Radar network system[J]. Chinese Journal of Sensors and Actuators, 2007, 20(1): 198-201. doi: 10.3969/j.issn.1004-1699.2007.01.044 [16] 丰昌政, 薛强. 雷达组网的精确极大似然误差配准算法[J]. 兵工自动化, 2012, 31(2): 5-8. doi: 10.3969/j.issn.1006-1576.2012.02.002 FENG Chang-zheng, XUE Qiang. An exact maximum likelihood error registration algorithm for radar network[J]. Ordnance Industry Automation, 2012, 31(2): 5-8. doi: 10.3969/j.issn.1006-1576.2012.02.002 [17] ZHOU Y F, HENRY L. An exact maximum likelihood registration algorithm for data fusion[J]. IEEE Trans Signal Processing, 1997, 46(6): 1560-1572. [18] 董云龙, 徐俊艳, 何友, 等. 一种修正的精确极大似然误差配准算法[J]. 哈尔滨工业大学学报, 2006, 38(3): 478-483. DONG Yun-long, XU Jun-yan, HE You, et al. A modified exact maximum likelihood registration algorithm[J]. Journal of Harbin Institute of Technology, 2006, 38(3): 478-483. [19] RISTIC B, OKELLO N N. Sensor registration in the ECEF coordinate system using the MLR algorithm[C]//Proceedings of the 6th International Conference on Information Fusion (Fusion 2003). Cains, Australia: [s.n.], 2003: 130-140. [20] 吴卫华, 江晶. WGS-84坐标系下空基多平台异质传感器MLR配准[J]. 现代防御技术, 2015, 43(2): 130-136. doi: 10.3969/j.issn.1009-086x.2015.02.021 WU Wei-hua, JIANG Jing. MLR Registration for dissimilar sensors of multiple airborne platforms in WGS-84[J]. Modern Defence Technology, 2015, 43(2): 130-136. doi: 10.3969/j.issn.1009-086x.2015.02.021 [21] GEREMIA J A, STUBBERUD S C, KRAMER K A. Target registration correction using the neural extended kalman filter[J]. IEEE Transactions on Instrumentation and Measurement, 2010, 59(7): 1964-1971. doi: 10.1109/TIM.2009.2030870 [22] 谢青青. 多传感器信息融合空时误差配准技术[M]. 哈尔滨: 哈尔滨工业大学, 2016. XIE Qing-qing. Spatical and time bias registration for multisensor fusion system[M]. Harbin: Harbin Institute of Technology, 2016. [23] 程然, 何科峰. 基于CKF的联合扩维误差配准算法[J]. 航空科学技术, 2018, 29(5): 66-73. CHENG Ran, HE Ke-feng. Augment state registration algorithm based on CKF[J]. Aeronautical Science & Technology, 2018, 29(5): 66-73. [24] ELDAR A, GEDIMINAS S, DALIUS M. Deep neural network-based feature descriptor for retinal image registration[C]//IEEE 6th Workshop on Advances in Information, Electronic and Electrical Engineering. Vilnius, Lithuania: IEEE, 2018: 1-4. [25] 刘宇, 陈昕, 王运锋, 等. 一种基于神经网络和UKF的自适应目标误差配准方法[J]. 工程科学版, 2012, 44(3): 101-105. LIU Yu, CHEN Xin, WANG Yun-feng, et al. An adaptive target error registration based on neural networks and UKF[J]. Journal of Sichuan University (Engineering Science Edition), 2012, 44(3): 101-105. [26] 李润泽, 邱火旺, 远留会. 一种基于合作目标的机动雷达误差配准技术[J]. 舰船电子工程, 2012, 32(7): 78-81. doi: 10.3969/j.issn.1627-9730.2012.07.030 LI Rui-ze, QIU Huo-wang, YUAN Liu-hui. A registration technique of mobile radar based on cooperative targets[J]. Ship Electronic Engineering, 2012, 32(7): 78-81. doi: 10.3969/j.issn.1627-9730.2012.07.030 [27] FARINA A, STUDER F A. Radar data processing[M]. New York: Research Studies Press Ltd, 1985. [28] 李力超, 史伟. 基于合作目标的三维空间贝叶斯传感器配准算法[J]. 航空计算技术, 2013, 43(3): 73-75. doi: 10.3969/j.issn.1671-654X.2013.03.019 LI Li-chao, SHI Wei. Registration algorithms of bayes sensor based on cooperative targets in ECEF[J]. Aeronautical Computing Technique, 2013, 43(3): 73-75. doi: 10.3969/j.issn.1671-654X.2013.03.019 [29] ONG H T, OXENHAM M G. Estimating biases in sensor measurements using airlane information[J]. Decisitions and Contronl, 2002, 11(13): 187-192. [30] 赵志超, 刘义, 肖顺平. 多雷达定位的动态加权融合算法及其精度分析[J]. 电光与控制, 2010, 17(5): 35-37. doi: 10.3969/j.issn.1671-637X.2010.05.009 ZHAO Zhi-chao, LIU Yi, XIAO Sun-ping. Dynamic weighted fusion algorithm and its accuracy analysis for multi-radar localization[J]. Electronics Optics & Control, 2010, 17(5): 35-37. doi: 10.3969/j.issn.1671-637X.2010.05.009 -

 点击查看大图
点击查看大图
图(7)
计量
- 文章访问数: 5480
- HTML全文浏览量: 1798
- PDF下载量: 57
- 被引次数: 0
















































