 ISSN
ISSN 


 下载:
下载:






-
共形阵列是一种阵元非规则排列的阵列。与均匀阵列不同,共形阵列阵元的排布方式通常符合空气动力学,如机载共形阵列往往是按照飞机的机身或机翼的表面流形排布[1-2]。由于共形阵列可以方便地安装在无人机、战斗机等各种中小型空中平台,相比于平面阵,其扫描范围更大,空间利用率更好,几乎不影响载机的启动性能,可以有效减小雷达散射截面积(radar cross section, RCS),同时也能降低载机负荷,因此共形阵被广泛应用在现代雷达体系中[3]。与均匀线阵或面阵不同的是,由于阵列的不规则性,各个阵元的单元方向图并不完全相同,在信号建模及处理时,不但需要考虑阵元间的空间位置关系,也需要考虑单元方向图带来的影响。学者们针对共形阵列做出了大量的研究,文献[4]设计了一种基于聚酰亚胺薄膜的线性共形八元偶极子阵列天线,文献[5]提出了一种自适应宽带波束形成算法,文献[6]提出了一种基于接收信号累积量分析的共形阵列盲波束形成方法。
在共形阵中干扰抑制也是一个必须面对的问题,广义旁瓣对消器(generalized sidelobe canceller, GSC)是一种有效的干扰抑制手段[7],同样也被应用在共形阵信号处理中。广义旁瓣对消器由高增益的主通道天线和低增益的辅助通道天线构成。主通道天线保证目标信号能够无失真地通过,辅助通道天线用来对消主通道内的干扰信号。为了避免在对消时对主通道内的目标产生不必要的抵消,辅助通道天线接收到的信号需要先通过阻塞矩阵进行处理。在实际的相控阵雷达系统中,选用部分天线作为辅助通道,以输出误差信号平均功率最小作为目标来设计辅助通道的自适应权值。
一个广义旁瓣对消系统的性能取决于辅助天线的数目位置,只有选择合适的天线作为辅助通道,才能提高干扰抑制的性能。文献[8]在均匀平面阵列中,提出了一些辅助天线的配置方案,并分析了其对干扰抑制的影响,但并没有提出一种通用的优化方案。文献[9]提出了基于遗传算法的通道选择方法,以主通道输出功率最小为目标函数,通过遗传算法,选择出干扰抑制效果较好的辅助通道。通道选择在其他领域同样有重要应用,在空时自适应处理中,文献[10-11]利用基于贪婪算法的通道选择方法实现降维处理,保证输出性能的同时降低计算复杂度。通信处理中,文献[12]在传感器网络中选择合适的传感器以达到最佳的定位精度。
本文给出一个固定共形阵列,采用广义旁瓣对消结构进行干扰抑制,利用凸优化的方法解决辅助通道选择的问题。以最小化主通道输出为目标函数,引入通道选择向量,同时优化辅助通道权值与通道选择向量。由于目标函数被描述成一个0-1规划问题,无法直接解决,因此本文采用惩罚序列凸规划(sequential convex programming, SCP)算法,并基于最大最小(majorization-minimization, MM)算法求解。最后通过仿真对比最优通道法,验证了本文算法的优越性。
-
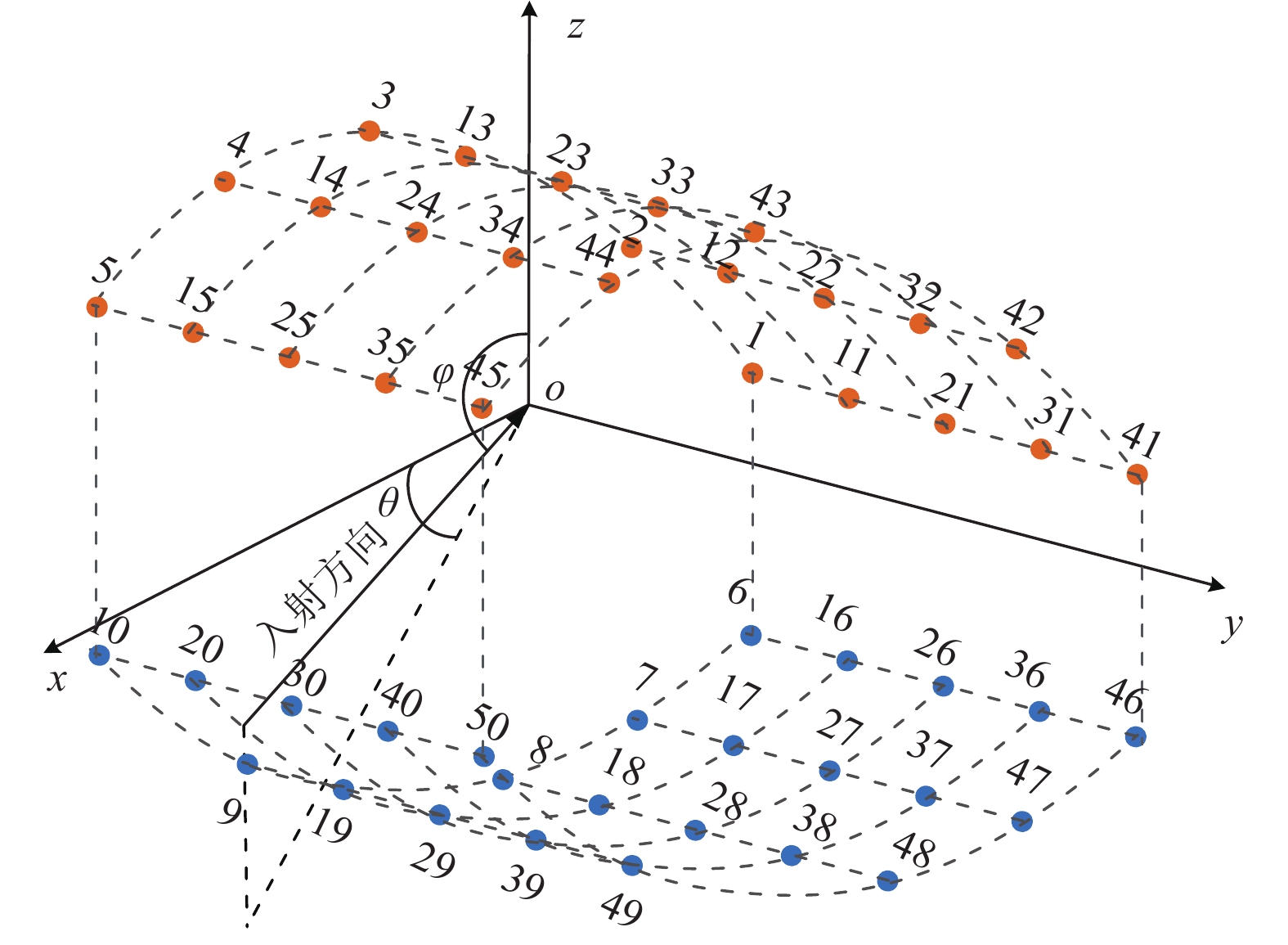
考虑如图1所示的机载共形阵列模型:以机翼与机身中轴线的交点为坐标原点
$o$ ,以机身中轴线机翼方向为$y$ 轴,以水平垂直$y$ 轴为$x$ 轴,$z$ 轴垂直水平面即${\rm{xoy}}$ 平面,建立空间直角坐标系。假设信号入射方向为
$(\theta ,\varphi )$ ,即入射信号与${\text{ + }}z$ 轴的夹角为$ \varphi $ ,入射信号在${\rm{xoy}}$ 平面的投影与${\text{ + }}x$ 轴夹角为$\theta $ ,则入射信号单位方向矢量为:$$ {\boldsymbol{r}}\left( {\theta ,\varphi } \right) = - \left[ {\sin \varphi \cos \theta {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} \sin \varphi \sin \theta {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} \cos \varphi } \right] $$ (1) 假设阵列有
$ N $ 个阵元,安置在三维空间中任一曲面上的第$n$ 个阵元的坐标为${{\boldsymbol{l}}_n} = {[{x_n},{y_n},{z_n}]^{\text{T}}},其中 n = 1, $ $ 2, \cdots ,N$ ,${{\text{(}} \cdot {\text{)}}^{\text{T}}}$ 表示转置操作。以空间原点为参考点,第$n$ 个阵元与空间原点间的空间相位差为:$$ \begin{split} {\phi _n}(\theta ,\varphi ) =& - \frac{{2{\text π} }}{\lambda }{\boldsymbol{r}}\left( {\theta ,\varphi } \right){{\boldsymbol{l}}_n} =\hfill \\ & - \frac{{2{\text π} }}{\lambda }({x_n}\sin \theta \cos \varphi {\text{ + }}{y_n}\sin \theta \sin \varphi {\text{ + }}{z_n}\cos \theta ) \end{split} $$ (2) 式中,
$\lambda $ 为信号波长。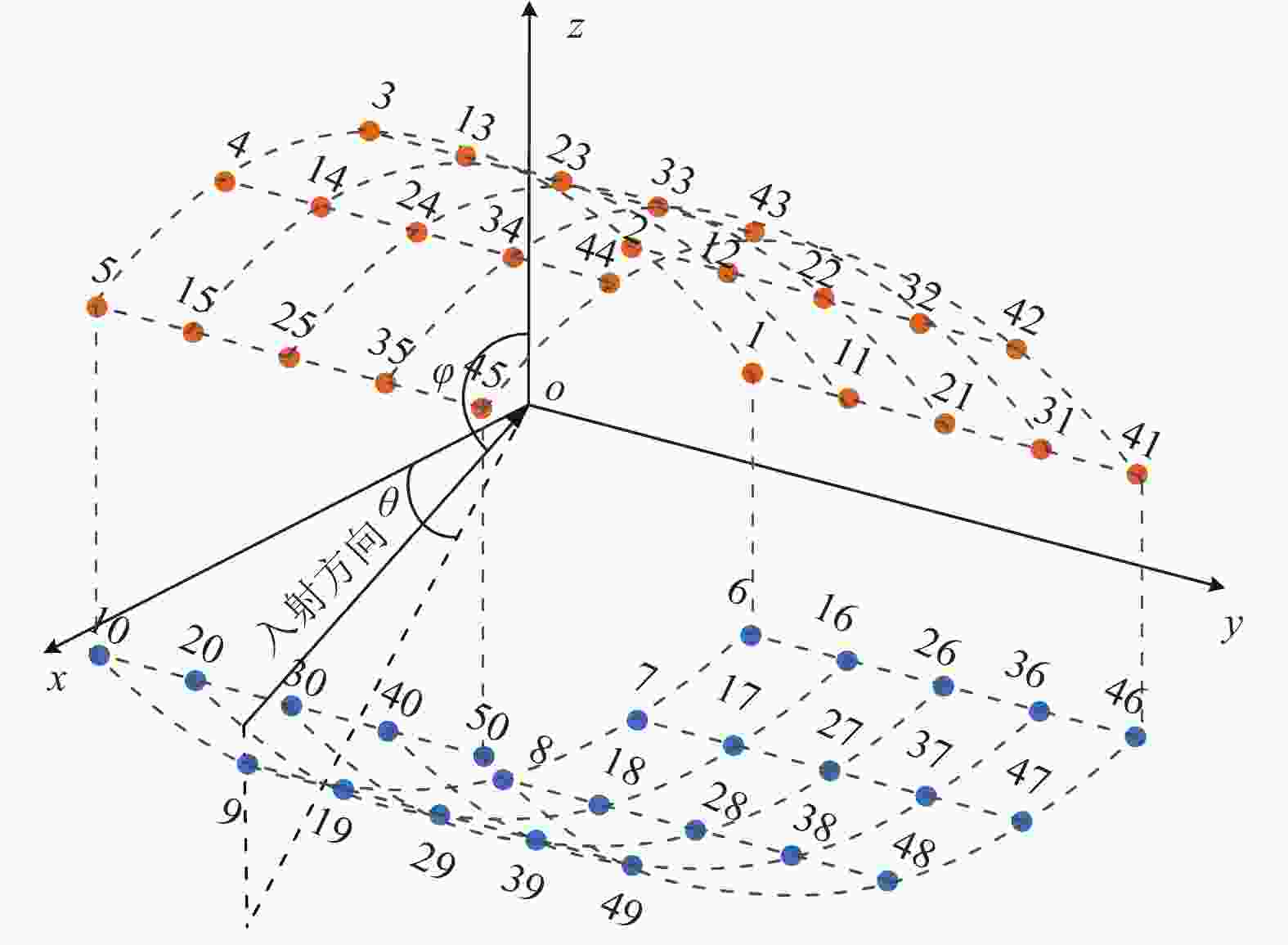
图 1 机翼共形阵列几何结构
仅考虑空间相位差,阵列的空间导向矢量可以表示为:
$$ {\boldsymbol{s}}\left( {\theta ,\varphi } \right) = {\left[ {{{\rm{e}}^{ - {\rm{j}}{\phi _1}\left( {\theta ,\varphi } \right)}},{{\rm{e}}^{ - {\rm{j}}{\phi _2}\left( {\theta ,\varphi } \right)}}, \cdots ,{{\rm{e}}^{ - {\rm{j}}{\phi _N}\left( {\theta ,\varphi } \right)}}} \right]^{\text{T}}} $$ (3) 根据共形阵几何配置的非线性特性,规定阵元安装指向为其所在处曲面的法线方向,即阵元的波束主瓣方向。在所示的机翼共形阵中,由于每个阵元的单元方向图各不相同,因此波束形成需要考虑单元方向图增益。假设在
$ (\theta ,\varphi ) $ 方向上的第$n$ 个阵元的单元方向图响应为$ {g_n}(\theta ,\varphi ) $ ,所有阵元的单元方向图响应可以表示为:$$ {\boldsymbol{g}}(\theta ,\varphi ) = {\left[ {{g_1}(\theta ,\varphi ),{g_2}(\theta ,\varphi ), \cdots ,{g_N}(\theta ,\varphi )} \right]^{\text{T}}} $$ (4) 相应地,阵列的空间导向矢量改写为:
$$ {\boldsymbol{a}}(\theta ,\varphi ) = {\boldsymbol{g}}(\theta ,\varphi ) \odot {\boldsymbol{s}}(\theta ,\varphi ) $$ (5) 式中,
$ \odot $ 为Hadamard积。假定有
$q$ 个干扰,用$ {{\boldsymbol{x}}_{\text{m}}} $ 表示主通道接收到的数据,从所有阵元中选择$K(K \geqslant q)$ 个作为辅助通道对干扰噪声进行对消,用$ {{\boldsymbol{x}}_{\text{a}}} $ 表示辅助通道接收的数据。$ {{\boldsymbol{a}}_{{\text{m}},0}} $ 为主通道目标导向矢量,$ {{\boldsymbol{a}}_{{\rm{m}},i}} $ 为主通道干扰导向矢量,$ {{\boldsymbol{n}}_{\rm{m}}} $ 为主通道噪声。$ {{\boldsymbol{a}}_{{\text{a}},0}} $ 为辅助通道目标导向矢量,$ {{\boldsymbol{a}}_{{\text{a}},i}} $ 为辅助通道干扰导向矢量,$ {{\boldsymbol{n}}_{\text{a}}} $ 为辅助通道噪声。则主通道和辅助通道接收到的信号可以分别表示为:$$ {{\boldsymbol{x}}_{\text{m}}} = {\alpha _{{\text{m}},0}}{{\boldsymbol{a}}_{{\text{m}},0}} + \sum\limits_{i = 1}^q {{\alpha _{{\text{m}},i}}{{\boldsymbol{a}}_{{\text{m}},i}}} + {{\boldsymbol{n}}_{\text{m}}} $$ (6) $$ {{\boldsymbol{x}}_{\text{a}}} = {\alpha _{{\text{a}},0}}{{\boldsymbol{a}}_{{\text{a}},0}} + \sum\limits_{i = 1}^q {{\alpha _{{\text{a}},i}}{{\boldsymbol{a}}_{{\text{a}},i}}} + {{\boldsymbol{n}}_{\text{a}}} $$ (7) 式中,
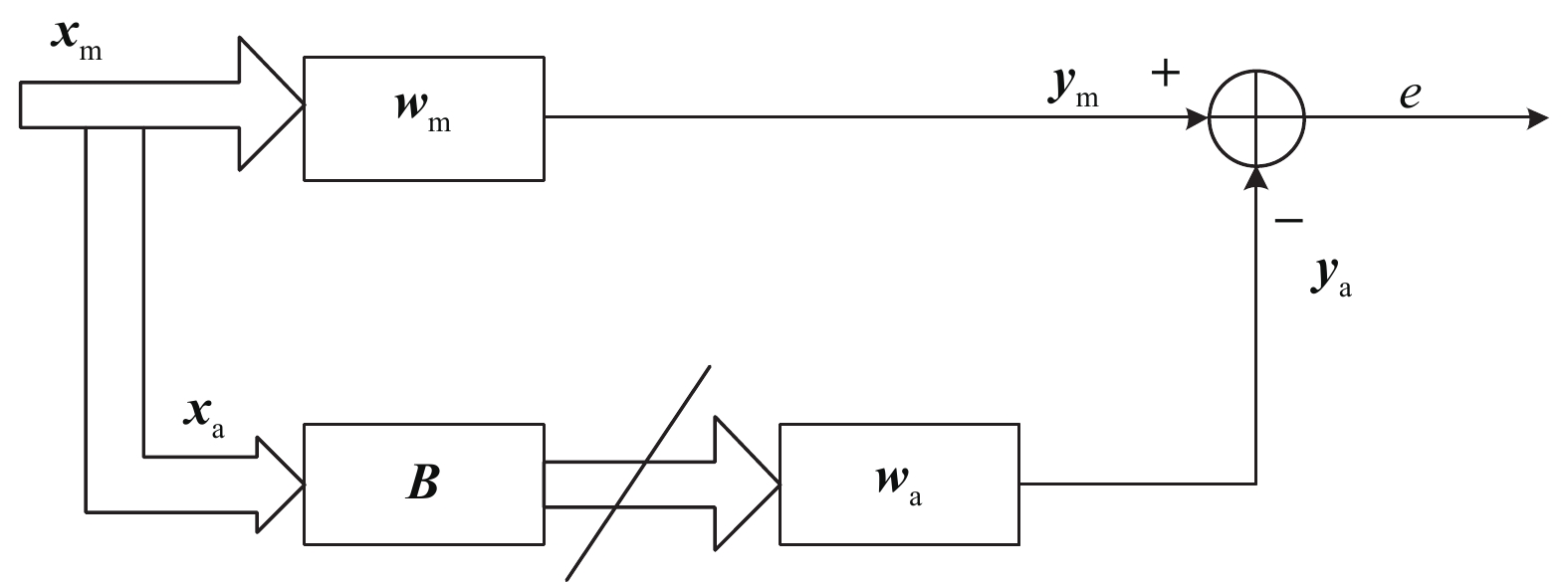
$ {\alpha _{{\text{m}},0}} $ 和$ {\alpha _{{\text{m}},i}} $ 是主通道接收的目标信号和干扰信号的幅度;$ {\alpha _{{\text{a}},0}} $ 和$ {\alpha _{{\text{a}},i}} $ 是辅助通道接收的目标信号和干扰信号的幅度。噪声为加性高斯白噪声。广义旁瓣对消结构如图2所示。

图 2 广义旁瓣对消器结构
用
$e$ 表示通过旁瓣对消后的剩余输出信号:$$ e = {y_{\text{m}}} - {y_{\text{a}}} = {\boldsymbol{w}}_{\text{m}}^{\text{H}}{{\boldsymbol{x}}_{\text{m}}} - {\boldsymbol{w}}_{\text{a}}^{\text{H}}{\boldsymbol{B}}{{\boldsymbol{x}}_{\text{a}}} $$ (8) 式中,
${{\text{(}} \cdot {\text{)}}^{\text{H}}}$ 表示共轭转置操作;$ {\boldsymbol{B}} $ 为阻塞矩阵,阻塞辅助通道中的期望信号,从而避免信号自消。$$ {\boldsymbol{B}}{{\boldsymbol{a}}_{{\text{a}},0}} = 0 $$ (9) 引入通道选择矩阵
${\boldsymbol{p}}$ ,${\boldsymbol{p}}$ 是一个由0,1构成的大小为$N \times 1$ 维的向量,1表示选择该位置上的阵元作为辅助通道,0表示不选用,则式(8)可以写成:$$ e = {y_{\text{m}}} - {y_{\text{a}}}= {\boldsymbol{w}}_{\text{m}}^{\text{H}}{\boldsymbol{x}} - {\boldsymbol{w}}_{\text{a}}^{\text{H}}{\boldsymbol{B}}({\boldsymbol{p}} \odot {\boldsymbol{x}}) $$ (10) 式中,
$ {{\boldsymbol{w}}_{\text{m}}} $ 和$ {{\boldsymbol{w}}_{\text{a}}} $ 分别为主通道和辅助通道的权值;$ {{\boldsymbol{w}}_{\text{m}}} $ 采用静态方向图权值。 -
当辅助通道位置已知时,辅助通道权值有闭合解:
$$ {{\boldsymbol{w}}_{\text{a}}} = {({\boldsymbol{B}}{{\boldsymbol{R}}_{\text{a}}}{{\boldsymbol{B}}^{\text{H}}})^{ - 1}}{\boldsymbol{B}}{{\boldsymbol{R}}_{{\text{a,m}}}}{{\boldsymbol{w}}_{\text{m}}} $$ (11) 式中,
${{\boldsymbol{R}}_{\text{a}}} = [{{\boldsymbol{x}}_{\text{a}}}{\boldsymbol{x}}_{\text{a}}^{\text{H}}]$ ;${{\boldsymbol{R}}_{{\text{a,m}}}} = [{{\boldsymbol{x}}_{\text{a}}}{\boldsymbol{x}}_{\text{m}}^{\text{H}}]$ 。参照文献[11]中通道优选的思路,从
$N$ 个通道中选取$K$ 个通道,共进行$N - K$ 次操作。在第$n$ 次操作时,从$N - n{\text{ + 1}}$ 个通道中选择$N - n$ 个通道,共有$N - n{\text{ + 1}}$ 个方式,比较每一个选取方式的输出信号功率,选择最小输出信号功率对应的那一组通道,保留这组$N - n$ 个通道作为寻优结果,重复上述操作,直到最终剩余$K$ 个通道,即为所选的辅助通道。该方法运算量小,是一种局部最优方法,但并不能保证是全局最优的结果,无法找到合适的辅助通道结果。因此本文从全局优化的角度出发,提出基于SCP的凸优化方法。 -
根据式(8),把
$ {{\boldsymbol{B}}^{\text{H}}}{{\boldsymbol{w}}_{\text{a}}} $ 看作一个整体,令$ {\hat {\boldsymbol{w}}_{\text{a}}} = $ $ {{\boldsymbol{B}}^{\text{H}}}{{\boldsymbol{w}}_{\text{a}}} $ ,可以得到:$$ \begin{split} e =& {y_{\text{m}}} - {y_{\text{a}}} =\\ & {\boldsymbol{w}}_{\text{m}}^{\text{H}}{{\boldsymbol{x}}_{\text{m}}} - {\boldsymbol{w}}_{\text{a}}^{\text{H}}{\boldsymbol{B}}{{\boldsymbol{x}}_{\text{a}}}= {\boldsymbol{w}}_{\text{m}}^{\text{H}}{{\boldsymbol{x}}_{\text{m}}} - \hat {\boldsymbol{w}}_{\text{a}}^{\text{H}}({\boldsymbol{p}} \odot {\boldsymbol{x}}) \end{split} $$ (12) 将剩余输出信号功率作为目标函数,通过最小化目标函数,同时优化通道选择矩阵
${\boldsymbol{p}}$ 和辅助通道权值$ {{\boldsymbol{w}}_{\text{a}}} $ 。优化问题可写成:$$ \begin{split} & \mathop {\min }\limits_{{{\hat {\boldsymbol{w}}}_{\rm{a}}},{\boldsymbol{p}}} \quad\;\; E\left\{ {{{\left| {{\boldsymbol{w}}_{\rm{m}}^{\rm{H}}{{\boldsymbol{x}}_{\rm{m}}} - \hat {\boldsymbol{w}}_{\rm{a}}^{\rm{H}}({\boldsymbol{p}} \odot {\boldsymbol{x}})} \right|}^2}} \right\}\\ & {\rm{s}}.{\rm{t}}.\quad\quad {{\boldsymbol{p}}^{\rm{T}}}{{\bf{1}}_N} = K\\ & \qquad \quad {p_i} \in \{ 0,1\} \;\;i = 1,2, \cdots ,N\\ & \qquad \quad \hat {\boldsymbol{w}}_{\rm{a}}^{\rm{H}}{{\boldsymbol{a}}_{{\rm{a}},0}} = {{0}} \end{split} $$ (13) 前两个约束条件保证所选阵元的个数为
$K$ ,第三个约束条件保证辅助通道权值能阻塞辅助通道中的期望信号,以达到阻塞矩阵的作用。目标函数中$ \hat {\boldsymbol{w}}_{\text{a}}^{\text{H}}({\boldsymbol{p}} \odot {\boldsymbol{x}}) $ 等价于$ {({\boldsymbol{p}} \odot {\hat {\boldsymbol{w}}_{\text{a}}})^{\text{H}}}{\boldsymbol{x}} $ ,令$ {\tilde {\boldsymbol{w}}_{\text{a}}} = {\boldsymbol{p}} \odot {\hat {\boldsymbol{w}}_{\text{a}}} $ ,由于Hadamard积$ \odot $ 的作用,使得$ {\tilde {\boldsymbol{w}}_{\text{a}}} $ 和${\boldsymbol{p}}$ 非0元素的索引是相同的,因此可以得到$ {\tilde {\boldsymbol{w}}_{\text{a}}} $ 和${\boldsymbol{p}}$ 之间的对应关系为:$$ \left| {{{\tilde w}_{{\text{a}},i}}} \right| \leqslant {p_i}\;\;\;\;i = 1,2, \cdots ,N $$ (14) 因此式(13)可以改写成下式:
$$ \begin{split} & \mathop {\min }\limits_{{{\tilde {\boldsymbol{w}}}_{\text{a}}},{\boldsymbol{p}}} \quad\;\; E\left\{ {{{\left| {{\boldsymbol{w}}_{\text{m}}^{\text{H}}{{\boldsymbol{x}}_{\text{m}}} - \tilde {\boldsymbol{w}}_{\text{a}}^{\text{H}}{\boldsymbol{x}}} \right|}^2}} \right\} \hfill \\ & {\rm{s}}.{\rm{t}}. \quad\quad {{\boldsymbol{p}}^{\rm{T}}}{{\bf{1}}_N} = K \hfill \\ & \qquad \quad {\text{ }}{p_i} \in \{ 0,1\} \;\;\;\;i = 1,2, \cdots ,N \hfill \\ & \qquad \quad \tilde {\boldsymbol{w}}_{\text{a}}^{\text{H}}{{\boldsymbol{a}}_{{\text{a}},0}} = {{0}} \hfill \\ & \qquad \quad \left| {{{\tilde w}_{{\text{a}},i}}} \right| \leqslant {p_i}\;\;\;\;i = 1,2, \cdots ,N \end{split} $$ (15) 式(15)中若没有第二个约束条件,已经是一个凸问题,因此运用SCP算法来解决0-1优化问题。首先将离散的0-1约束
$ {p_i} \in \{ 0,1\} $ 松弛为${p_i} \in [0,1]$ ,接着在目标函数中添加一惩罚项$\gamma {{\boldsymbol{p}}^{\rm{T}}}\left( {{\mathbf{1}} - {\boldsymbol{p}}} \right)$ ,其中$\gamma \geqslant 0$ 是惩罚系数。可以发现当惩罚系数足够大时,必然可以使得${{\boldsymbol{p}}^{\rm{T}}}\left( {{\mathbf{1}} - {\boldsymbol{p}}} \right) = 0$ ,以保证所有的$ {p_i} $ 更趋向于0和1。$$ \begin{split} & \mathop {\min }\limits_{{{\tilde {\boldsymbol{w}}}_{\text{a}}},{\boldsymbol{p}}} \quad\;\; E\left\{ {{{\left| {{\boldsymbol{w}}_{\text{m}}^{\text{H}}{{\boldsymbol{x}}_{\text{m}}} - \tilde {\boldsymbol{w}}_{\text{a}}^{\text{H}}{\boldsymbol{x}}} \right|}^2}} \right\} + \gamma {{\boldsymbol{p}}^{\rm{T}}}\left( {{\mathbf{1}} - {\boldsymbol{p}}} \right) \hfill \\ & {\rm{s}}.{\rm{t}}. \quad\quad {{\boldsymbol{p}}^{\rm{T}}}{{\bf{1}}_N} = K \hfill \\ & \qquad\quad {\text{ }}{p_i} \in [0,1]\;\;\;\;i = 1,2, \cdots ,N \hfill \\ & \qquad\quad \tilde {\boldsymbol{w}}_{\text{a}}^{\text{H}}{{\boldsymbol{a}}_{{\text{a}},0}} = {{0}} \hfill \\ & \qquad\quad \left| {{{\tilde w}_{{\text{a}},i}}} \right| \leqslant {p_i}\;\;\;\;i = 1,2, \cdots ,N \end{split} $$ (16) 式(16)中的约束都是凸约束,但是目标函数却是非凸的,SCP算法将凹函数
${{\boldsymbol{p}}^{\rm{T}}}\left( {{\mathbf{1}} - {\boldsymbol{p}}} \right)$ 用其上界代替,假设第$t$ 次迭代已经得到${{\boldsymbol{p}}^{(t)}}$ ,则对于第$t + 1$ 次迭代,根据最大最小MM算法[13],${{\boldsymbol{p}}^{\rm{T}}}\left( {{\mathbf{1}} - {\boldsymbol{p}}} \right)$ 的上界为:$$ {{\boldsymbol{p}}^{\rm{T}}}\left( {{\bf{1}} - {\boldsymbol{p}}} \right) \leqslant {\left( {{\bf{1}} - 2{{\boldsymbol{p}}^{\left( t \right)}}} \right)^{\rm{T}}}{\boldsymbol{p}} + {{\boldsymbol{p}}^{{{\left( t \right)}^{\rm{T}}}}}{{\boldsymbol{p}}^{\left( t \right)}} $$ (17) 因此,第
$t + 1$ 次迭代,可以用${{\boldsymbol{p}}^{\rm{T}}}\left( {{\mathbf{1}} - {\boldsymbol{p}}} \right)$ 的上界替代它,则可以得到:$$ \begin{split} & \mathop {\min }\limits_{{{\tilde {\boldsymbol{w}}}_{\text{a}}},{\boldsymbol{p}}} \quad\; E\left\{ {{{\left| {{\boldsymbol{w}}_{\text{m}}^{\text{H}}{{\boldsymbol{x}}_{\text{m}}} - \tilde {\boldsymbol{w}}_{\text{a}}^{\text{H}}{\boldsymbol{x}}} \right|}^2}} \right\} + \hfill \\ & \qquad\quad \gamma {\left( {{\bf{1}} - 2{{\boldsymbol{p}}^{\left( t \right)}}} \right)^{\rm{T}}}{\boldsymbol{p}} + \gamma {{\boldsymbol{p}}^{{{\left( t \right)}^{\rm{T}}}}}{{\boldsymbol{p}}^{\left( t \right)}} \hfill \\ & {\rm{s}}.{\rm{t}}. \quad\quad {{\boldsymbol{p}}^{\rm{T}}}{{\bf{1}}_N} = K \hfill \\ & \qquad\quad {\text{ }}{p_i} \in [0,1]\;\;\;\;i = 1,2, \cdots ,N \hfill \\ & \qquad\quad \tilde {\boldsymbol{w}}_{\text{a}}^{\text{H}}{{\boldsymbol{a}}_{{\text{a}},0}} = {{0}} \hfill \\ & \qquad\quad \left| {{{\tilde w}_{{\text{a}},i}}} \right| \leqslant {p_i}\;\;\;\;i = 1,2, \cdots ,N \end{split} $$ (18) 由于优化出的
$ {\boldsymbol{p}} $ 并不完全是由0和1构成,因此对于优化结果,将大于1/2的值认为是1,其余位置设置为0,由此得到的${{\boldsymbol{p}}^{\text{*}}}$ 作为最终的辅助通道选择向量。 -
本文所提算法用MATLAB中的CVX工具包进行求解,从
$ N $ 个阵元中选择$K(K \geqslant q)$ 个作为辅助通道,计算复杂度约为$O({N^{3.5}})$ 。而将所有通道选择方法一一列举出来进行比较的穷举法一共有$C_N^K = $ $ N!/(K!(N - K)!)$ 种组合方式,每一次需要计算输出结果进行$ N $ 次乘法,因此穷举法的计算复杂度为:$$ {C_{{\text{exhaustive}}}}{\text{ = }}O\left( {\frac{{N \times N!}}{{K!(N - K)!}}} \right) $$ (19) 当所选的
$K$ 和$ N $ 较大时,穷举法的计算量是远大于本文算法的。一般来说当$N > 12$ ,$3 < K < N - 3$ 时,穷举法计算量开始大于本文算法,$K$ 越接近$N/2$ ,计算量越巨大。即使当阵元数$N \leqslant 12$ ,也会出现因为$K$ 的增加而计算复杂度大于本文算法的情况,而实际应用中,$K$ 和$ N $ 都是远大于这些数值的,因此,本文算法的计算复杂度远小于穷举法。 -
本节对提出的算法进行数值仿真。针对所给出的共形阵列,对不同来向的干扰进行抑制,对比了静态方向图、最优通道选择、穷举法与本文算法。仿真展示的为方位维的归一化方向图。参数设置:阵元数
$N = 50$ ,波长$\lambda {\text{ = }}0.667$ m。假定目标的来向为$ ({\theta }_{0},{\varphi }_{0})=(180{\text{°}},\;128{\text{°}}) $ ,目标的信号比为${\rm{SNR}} = 0\;{\rm{dB}}$ ,干扰的强度为${\rm{INR}} = 40\;{\rm{dB}}$ ,共形阵列的单元方向图$ {\boldsymbol{g}}(\theta ,\varphi ) $ 已知。图3假定在
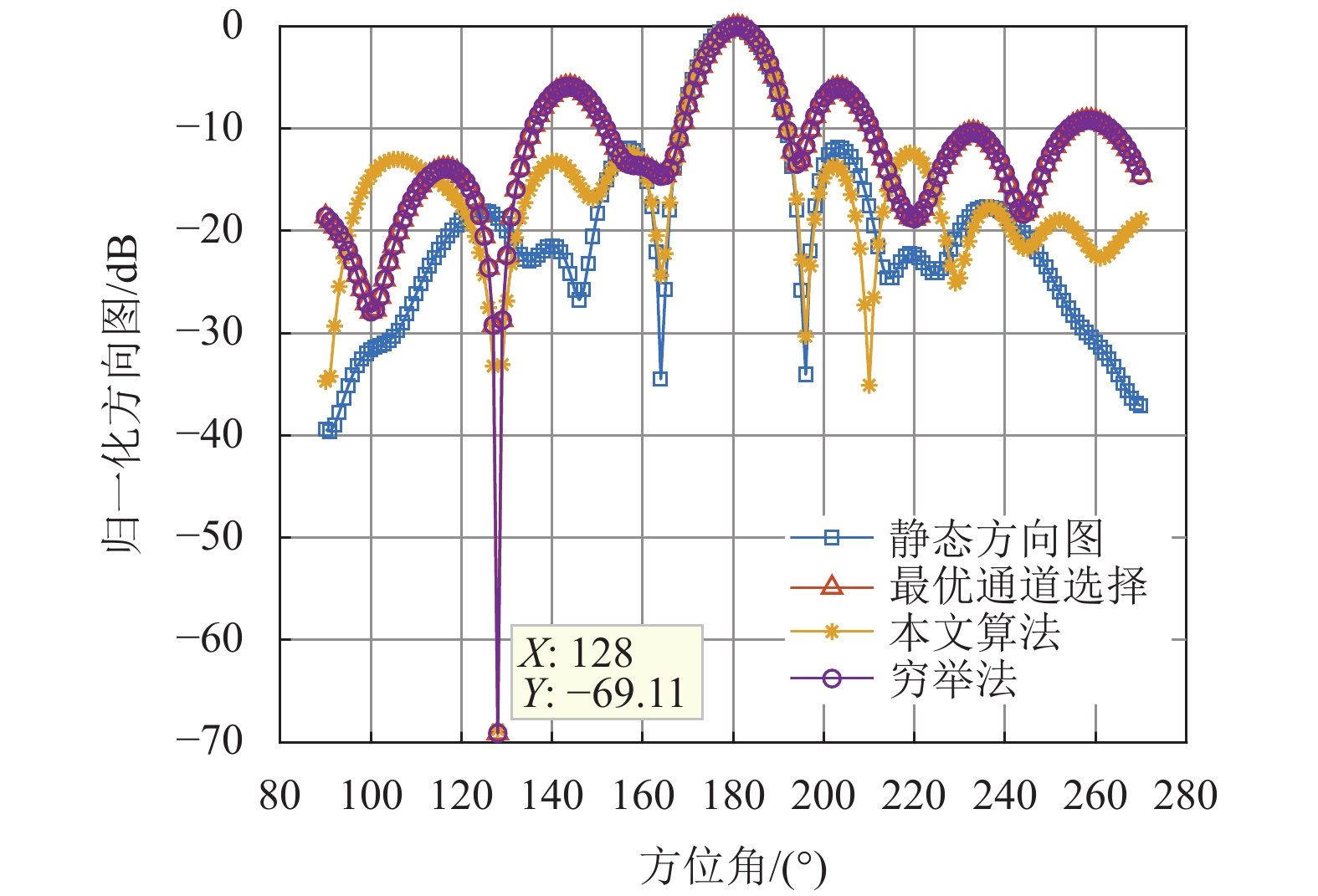
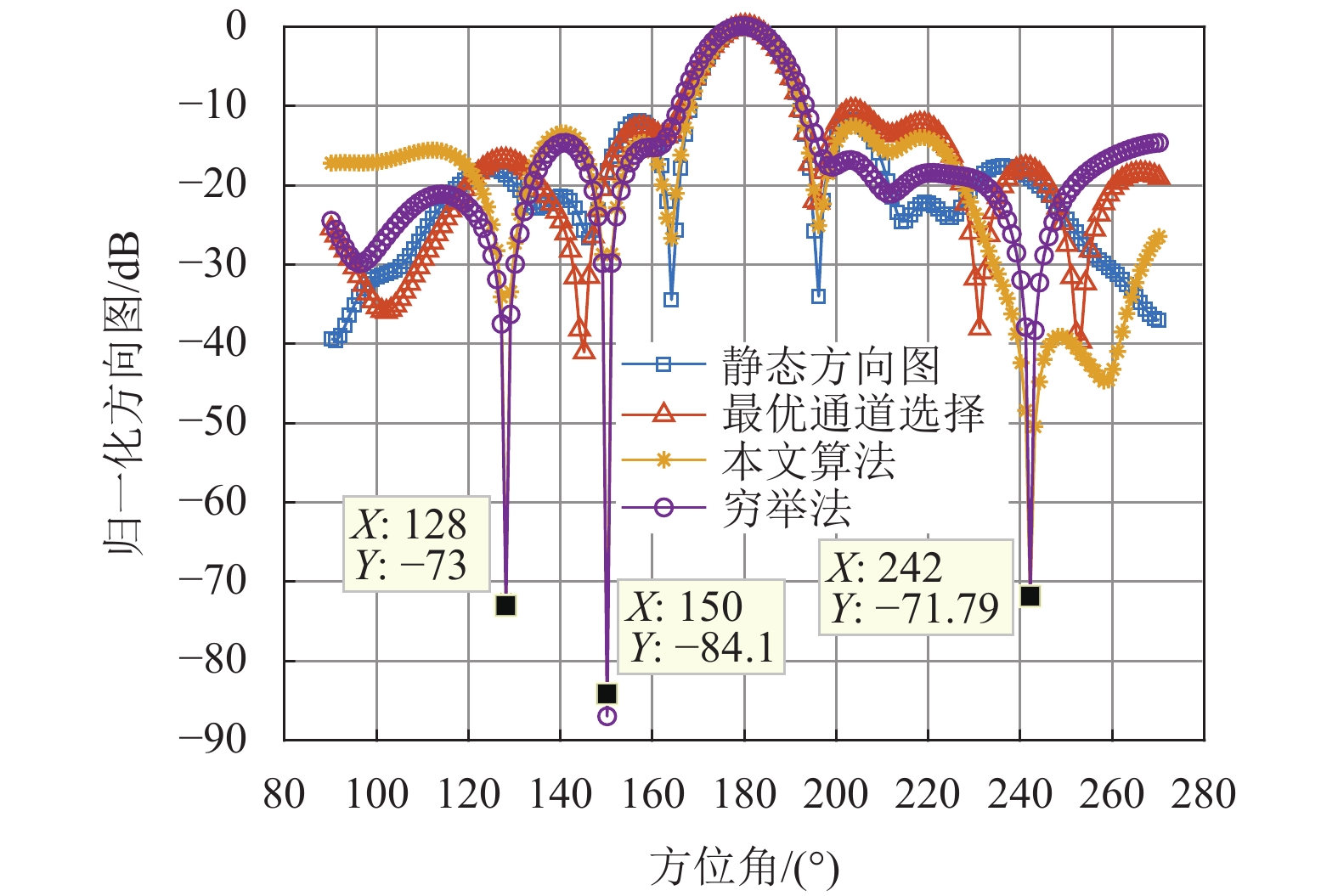
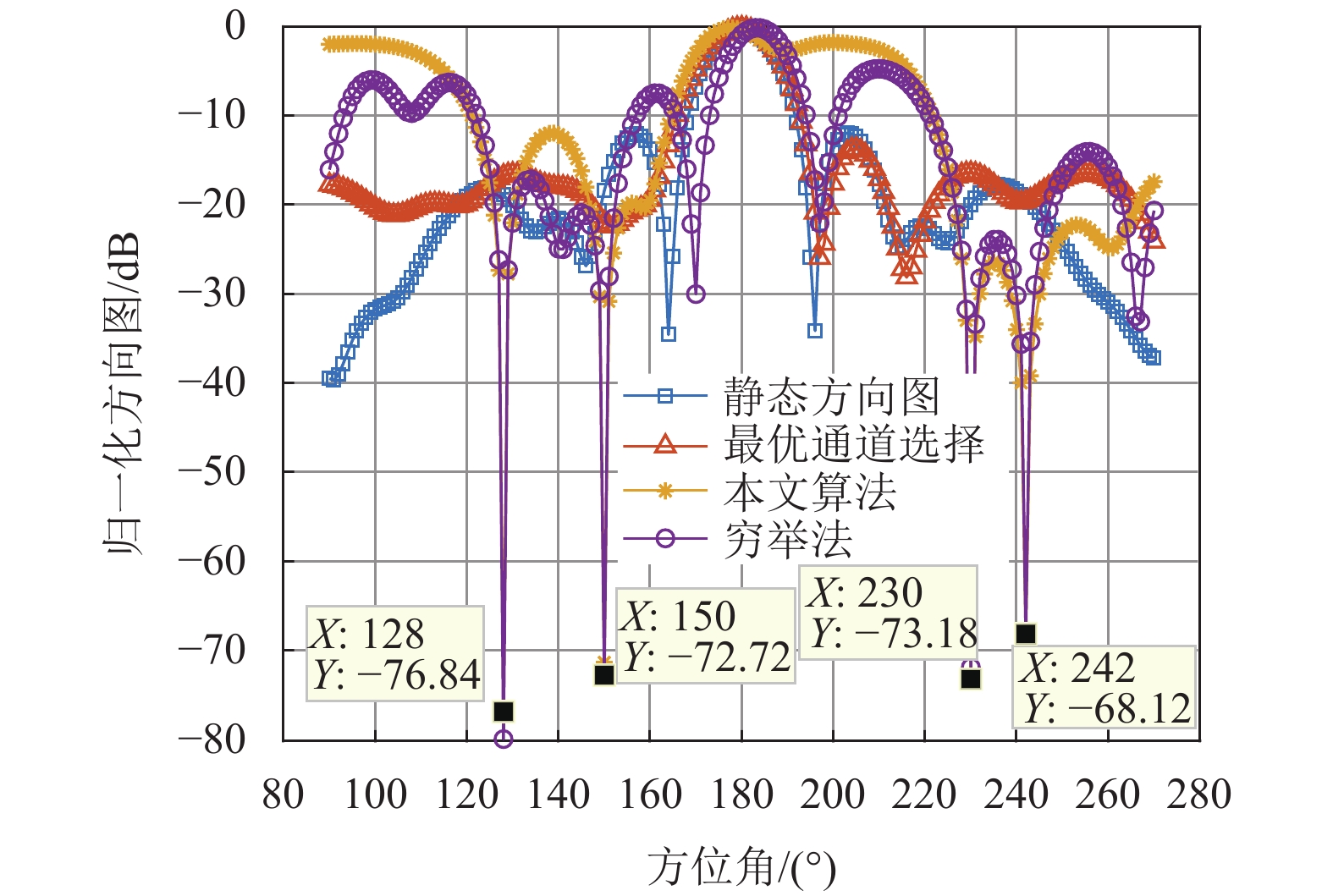
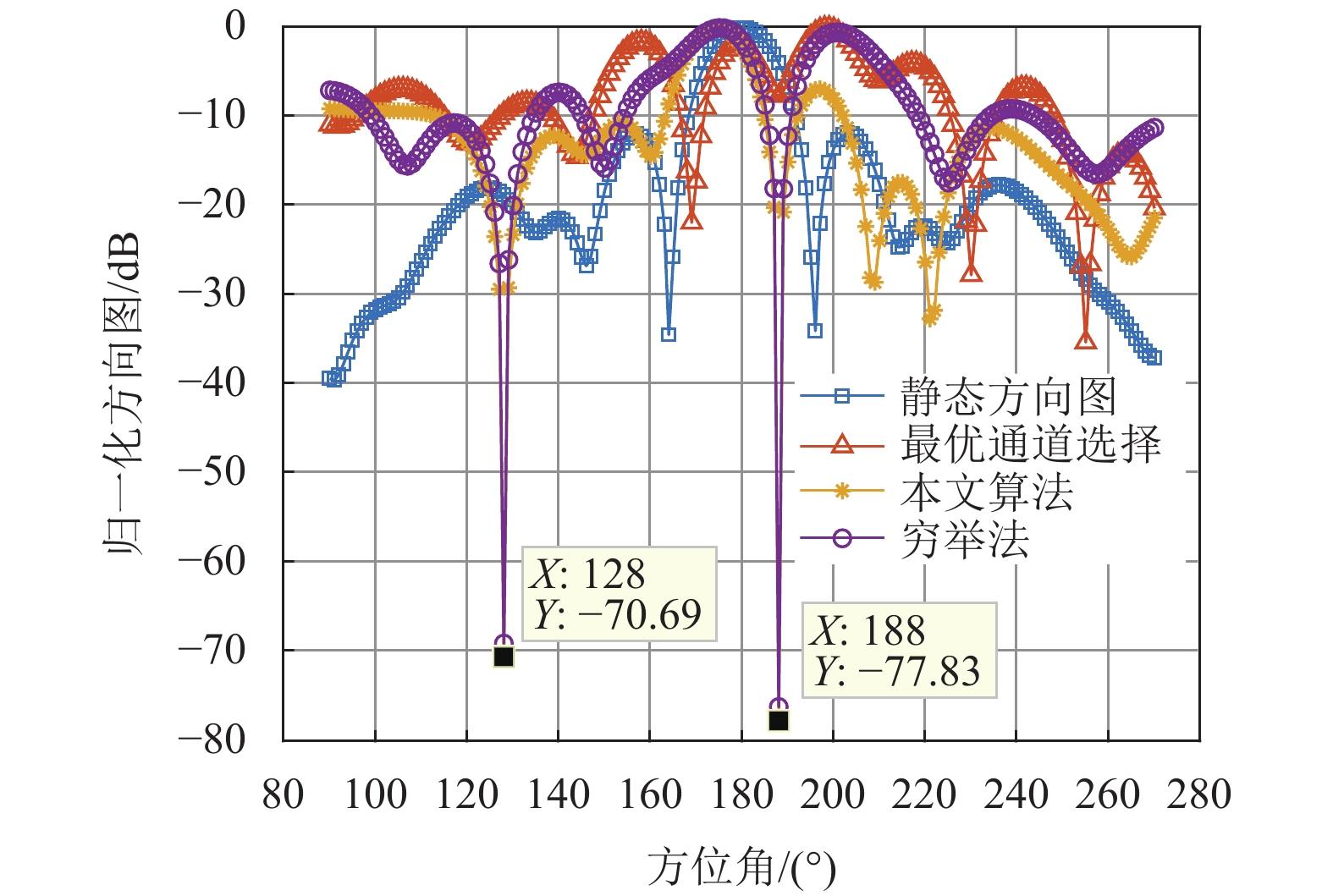
$ ({\theta }_{1},{\varphi }_{1})=(128{\text{°}},\;128{\text{°}}) $ 处存在一个干扰,选用两个辅助通道数对干扰进行抑制,即$K{\text{ = }}2$ 。能够看出,当只有一个干扰的时候,3种方法均能做到很好的抑制。图4、图5和图6展示的是在更多干扰的情况下,干扰抑制的效果。将干扰数目$q$ 分别增加为2、3、4个,所在的角度分别为$ ({\theta }_{2},{\varphi }_{2})=(242{\text{°}},\;128{\text{°}}) $ ,$ ({\theta }_{3},{\varphi }_{3})= (150{\text{°}},\;128{\text{°}}) $ ,$ ({\theta }_{4},{\varphi }_{4})= $ $ (230{\text{°}},\;128{\text{°}}) $ ,为了能够有效地抑制,辅助通道数$K$ 分别增加为3、4、5个。可看出当干扰数增加时,最优通道选择并不能形成足够的凹口。而本文算法对比穷举法,虽然没有选中完全一致的辅助通道,但仍能在各个干扰处形成零陷,准确抑制干扰,并与穷举法有相当的性能。图7展示的是当干扰在主瓣内时的情况,最优通道法无法进行干扰抑制,虽然本文算法和穷举法仍能在干扰处形成零陷,但主瓣均有一定程度的畸变和偏移。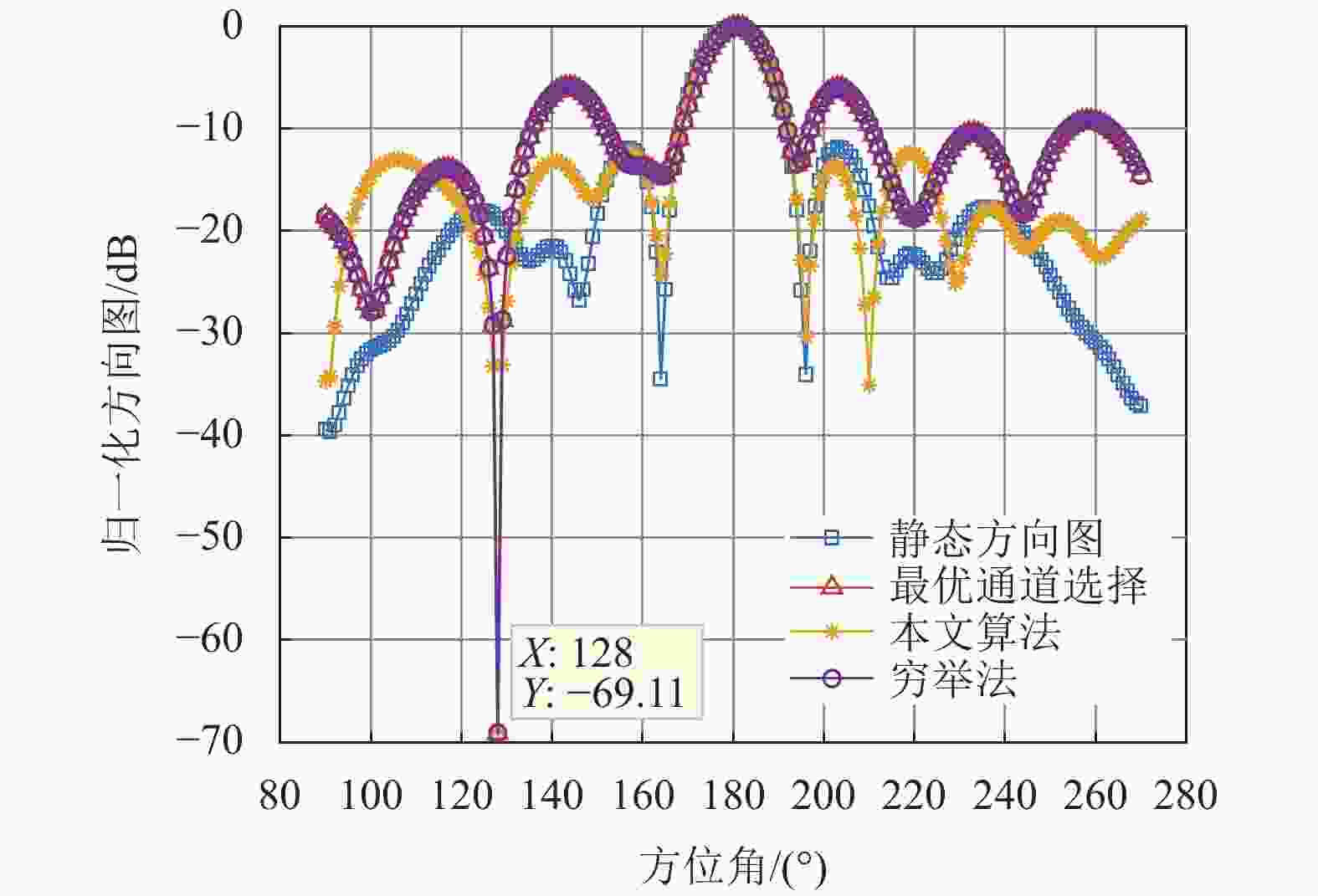
图 3 归一化方向图
$(q = 1,K = 2)$ 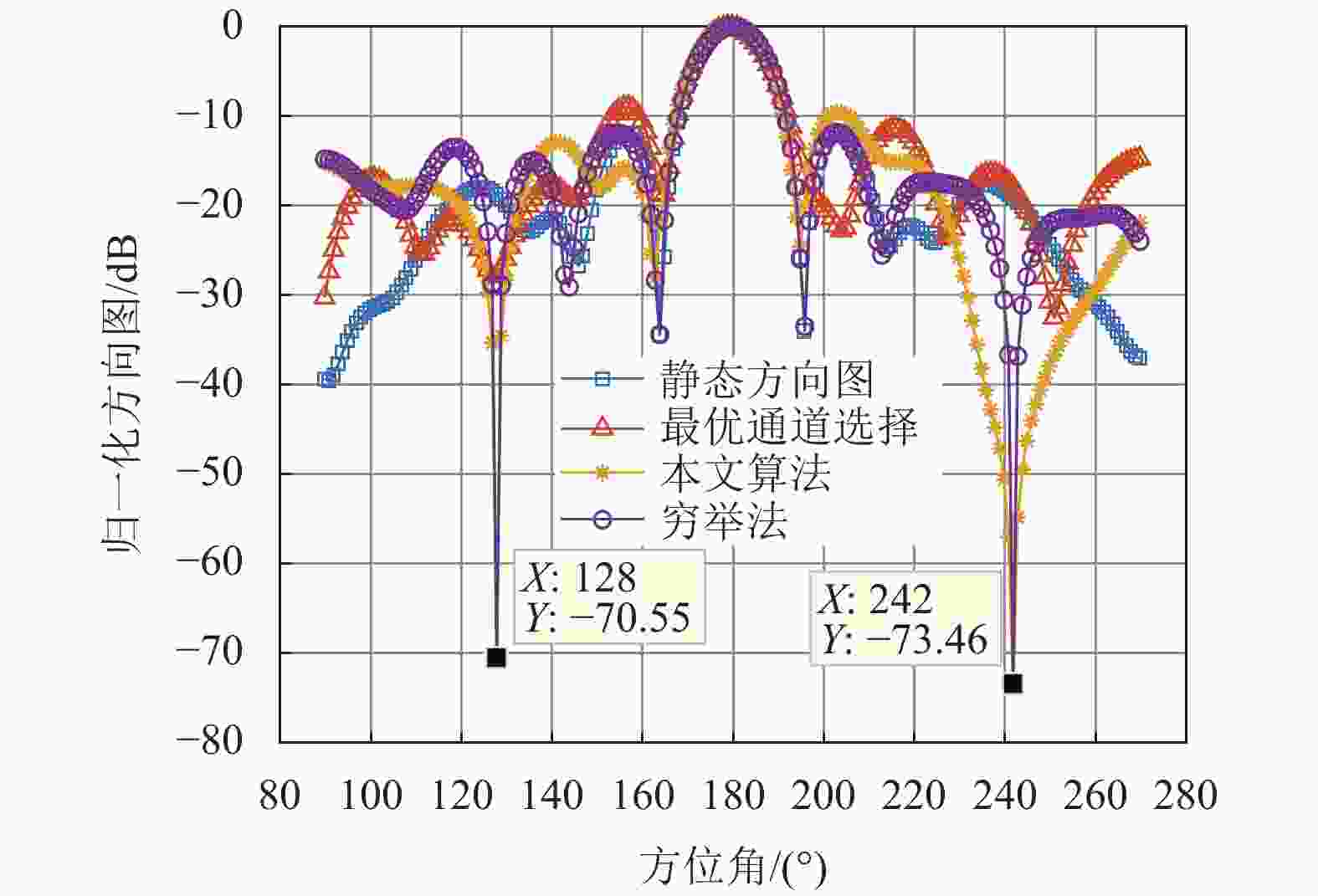
图 4 归一化方向图
$(q = 2,K = 3)$ 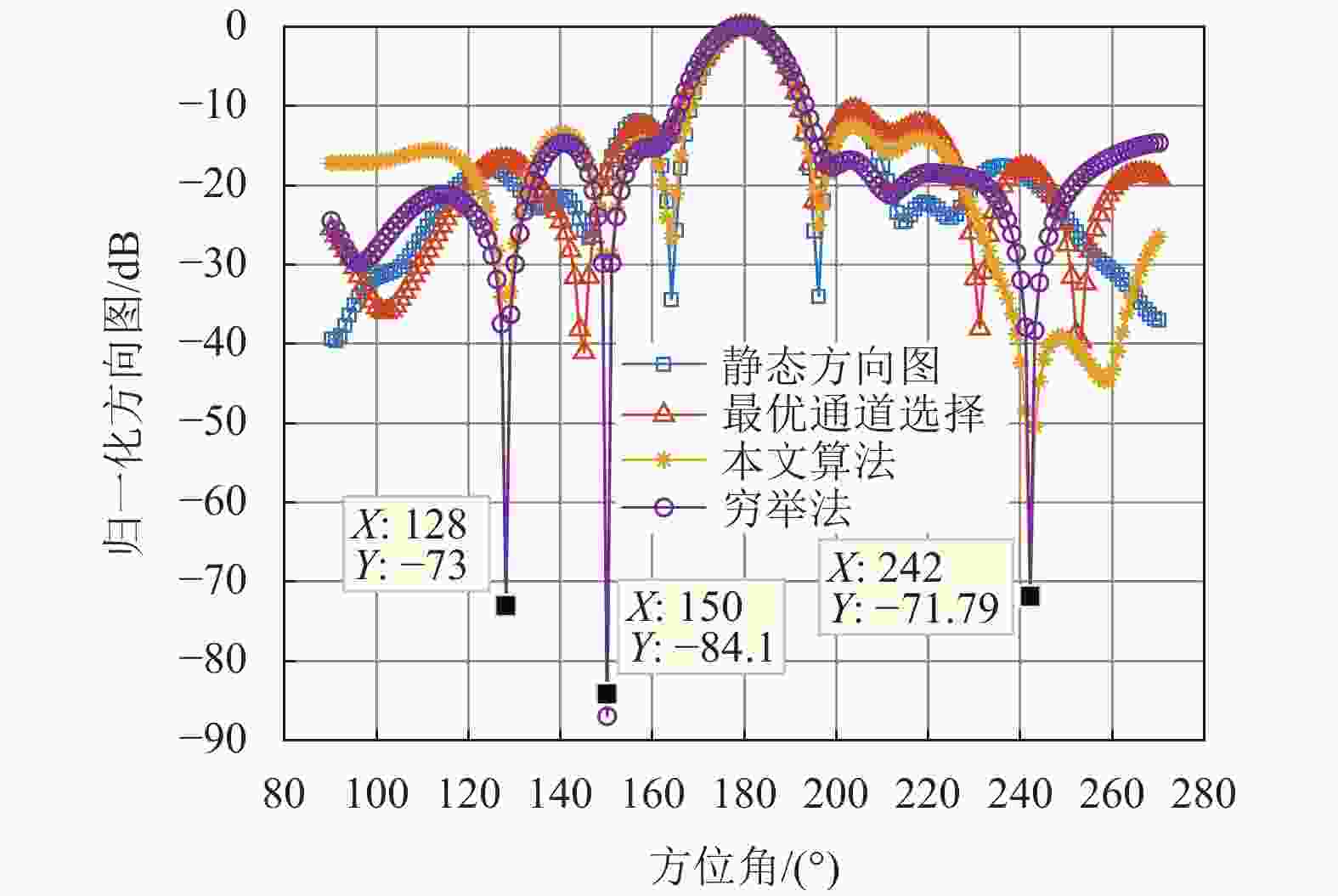
图 5 归一化方向图
$(q = 3,K = 4)$ 
图 6 归一化方向图
$(q = 4,K = 5)$ 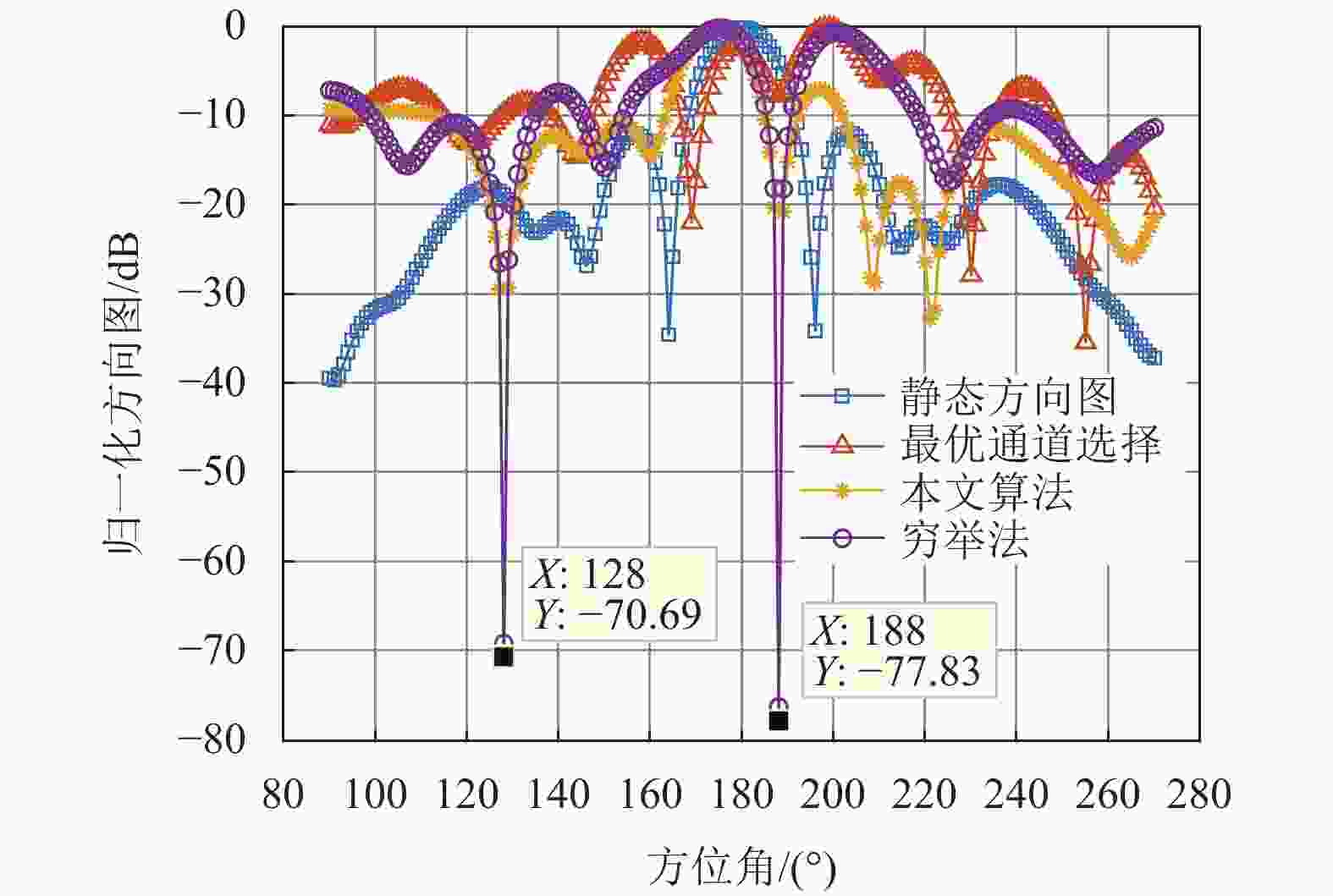
图 7 归一化方向图
$(q = 2,K = 3)$ (主瓣干扰) -
针对共形阵下的干扰抑制问题,本文利用广义旁瓣对消结构,提出了基于序列凸规划算法的辅助通道选择方法。以误差信号平均功率最小为目标函数,利用最大最小算法构造替代函数把问题转化成凸问题。与穷举法和最优通道法对比,本文算法在多个干扰的情况下仍能有很好的抑制效果,相较于穷举法,降低了大量计算量,尤其是在选择较多辅助通道的情况下。
The Optimization of Auxiliary Channel Selection for Generalized Sidelobe Cancellation in Conformal Array
-
摘要: 广义旁瓣对消器GSC在传统的机载相控阵雷达的干扰抑制中有着广泛应用,辅助通道的选择直接影响干扰抑制效果。在共形阵列中,由于各个阵元的摆放方式不同导致每个阵元的单元方向图响应并不相同,选择合适的辅助通道更为重要。该文在共形阵信号模型基础上,提出了一种以最小化广义旁瓣对消输出为目标的优化方法。为了解决非凸的0-1优化问题,该文采用惩罚序列凸规划SCP算法,并基于最大最小MM算法求解。仿真和数值结果证明了该文算法在共形阵下能准确选择出具有良好干扰抑制性能的辅助通道。Abstract: The generalized sidelobe canceller (GSC) is utilized widely in the interference suppression in the traditional airborne phased array radars. The selection of the auxiliary channels in the GSC affects the interference suppression performance directly. In a conformal array, the unit pattern response of each array element is not the same due to the different placements of array elements. Therefore, it is more significant to select the appropriate auxiliary channels for the GSC. Based on the signal model of the conformal array, this paper proposes an optimization method which aims to minimize the output of generalized sidelobe cancellation. In order to solve the non-convex 0-1 optimization problem, the paper adopts the penalty sequential convex programming (SCP) method and the majorization-minimization (MM) algorithm to solve it. The simulation and numerical results prove that the proposed algorithm can select the auxiliary channels with great interference suppression performance in the conformal array.
-
[1] MORTON T E, PASALA K M. Pattern synthesis of conformal arrays for airborne vehicles[C]//2004 IEEE Aerospace Conference Proceedings. Piscataway: IEEE, 2004: 1030-1039. [2] MORTON T E, PASALA K M. Pattern synthesis and performance of conical arrays[C]//Proceedings of the Thirty-Sixth Southeastern Symposium on System Theory. Piscataway: IEEE, 2004: 145-149. [3] MORTON T E, PASALA K M. Performance analysis of conformal conical arrays for airborne vehicles[J]. IEEE Transactions on Aerospace and Electronic Systems, 2006, 42(3): 876-890. doi: 10.1109/TAES.2006.248218 [4] PENG J J, QU S W, XIA M Y, et al. Wide-scanning conformal phased array antenna for UAV radar based on polyimide film[J]. IEEE Antennas and Wireless Propagation Letters, 2020, 19(9): 1581-1585. doi: 10.1109/LAWP.2020.3011412 [5] RASEKH M, SEYDNEJAD S R. Design of an adaptive wideband beamforming algorithm for conformal arrays[J]. IEEE Communications Letters, 2014, 18(11): 1955-1958. doi: 10.1109/LCOMM.2014.2357417 [6] SHAHIDIZANDI S, SEYDNEJAD S R. Blind beamforming for conformal arrays[J]. IEEE Antennas and Wireless Propagation Letters, 2017, 16: 940-943. doi: 10.1109/LAWP.2016.2614948 [7] JABLON N. Adaptive beamforming with the generalized sidelobe canceller in the presence of array imperfections[J]. IEEE Transactions on Antennas and Propagation, 1986, 34(8): 996-1012. doi: 10.1109/TAP.1986.1143936 [8] 邱朝阳, 刘铭湖, 饶妮妮, 等. 辅助天线配置对自适应旁瓣对消系统性能的影响[J]. 数据采集与处理, 2013(2): 123-128. doi: 10.3969/j.issn.1004-9037.2013.02.001 QIU C Y, LIU M H, RAO N N, et al. Effect of allocation of auxiliary antenna on performance of adaptive sidelobe canceller[J]. Journal of Data Acquisition & Processing, 2013(2): 123-128. doi: 10.3969/j.issn.1004-9037.2013.02.001 [9] DONG W, XU Z H, LIU X H, et al. Auxiliary elements selection for planar array sidelobe cancellation based on genetic algorithm[C]//12th European Conference on Antennas and Propagation. Stevenage: IET, 2018: 1-5. [10] XIE L, HE Z S, TONG J, et al. A recursive angle-Doppler channel selection method for reduced-dimension space-time adaptive processing[J]. IEEE Transactions on Aerospace and Electronic Systems, 2020, 56(5): 3985-4000. doi: 10.1109/TAES.2020.2983533 [11] ZHANG W, HE Z S, LI J, et al. A method for finding best channels in beam-space post-Doppler reduced-dimension STAP[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(1): 254-264. doi: 10.1109/TAES.2013.120145 [12] YANG X J, NIU R X. Adaptive sensor selection for nonlinear tracking via sparsity-promoting approaches[J]. IEEE Transactions on Aerospace and Electronic Systems, 2018, 54(4): 1966-1982. doi: 10.1109/TAES.2018.2805258 [13] SUN Y, BABU P, PALOMAR D P. Majorization-minimization algorithms in signal processing, communications, and machine learning[J]. IEEE Transactions onSignal Processing, 2017, 65(3): 794-816. doi: 10.1109/TSP.2016.2601299 -

 点击查看大图
点击查看大图
图(7)
计量
- 文章访问数: 3639
- HTML全文浏览量: 1301
- PDF下载量: 39
- 被引次数: 0







































































































































