 ISSN
ISSN 


 下载:
下载:
-
无源定位由于具有探测距离远、隐蔽性好等优点,在雷达、声纳、导航和无线通信网中有着广泛的应用[1-4]。当利用多个运动接收站对静止目标定位时,通常通过提取目标辐射源信号的时差参数信息进行定位。但当目标辐射的是窄带通信信号时,时差测量误差将会很大甚至无法测量,而由接收站与目标辐射源之间相对运动产生的多普勒频移信息却可以精确测量[5]。因此,多普勒频移定位有着时差定位所不具备的优点,逐步发展成为无源定位中重要的技术之一[6]。
然而,由于多普勒频移定位方程具有很强的非线性,对目标位置的求解仍然是当前的研究难点。文献[7-8]最先采用穷举法,对该非线性定位问题进行求解,目标定位的精度随着步进值的减小而提高,但这将不可避免地产生巨大的计算量,使得此方法很难实现。随后,大量研究把各个接收站测得的多普勒频移进行差分处理,利用到达频差信息进行定位[9-11],分别提出了基于搜索法[12]、迭代法[13-14]和解析法[15]的目标定位。但上述方法在求解目标位置的过程中,不同参考站的选择将影响定位精度,在实际定位中需根据目标的位置合理选择参考站,增大了定位算法的复杂性[16]。文献[17]提出了一种基于多普勒频移的多站无源定位算法,此方法无需选择参考站,具有解析解的形式。但没有深入分析定位精度以及载频估计误差对定位精度的影响。
在非合作的无源定位环境下,目标辐射源发射信号的载波频率通常无法准确获取,利用多普勒频移进行定位不可避免将存在载频估计误差。在考虑载频估计误差的情况下,本文对基于多普勒频移定位的性能进行了理论分析,推导出其克拉美罗界(Cramer-Rao lower bound, CRLB);同时,提出了在此情况下的一种解析解算法,并计算出其理论上的均方误差值(mean square error, MSE)。通过仿真实验,证明了此算法理论上的MSE值与CRLB值一致,并验证了本文方法相较于文献[17]中的算法具有更强的鲁棒性和更高的定位精度。
-
假设有一位置未知的目标辐射源位于
${{\boldsymbol{u}}^{\rm{o}}} = {\left[ {{x^{\rm{o}}},{y^{\rm{o}}}} \right]^{\rm{T}}} \in {R^2}$ ,其发射信号的载波频率为$f_{\rm{c}}^{\rm{o}}$ 。发射的信号被分布在多个位置的运动接收站截获,各个接收站的位置和速度分别为${{\boldsymbol{s}}^{\rm{o}}} = {\left[ {x_i^{\rm{o}},y_i^{\rm{o}}} \right]^{\rm{T}}} \in {R^2}$ 和${{\boldsymbol{\dot s}}^{\rm{o}}} = {\left[ {\dot x_i^{\rm{o}},\dot y_i^{\rm{o}}} \right]^{\rm{T}}} \in {R^2}$ ,$i = 1,2, \cdots ,M$ 。每个接收站截获的目标辐射源信号的频率估计值为:$$ {f_i} = f_{\rm{c}}^{\rm{o}} - \frac{{f_{\rm{c}}^{\rm{o}}{{\left( {{{\boldsymbol{u}}^{\rm{o}}} - {\boldsymbol{s}}_i^{\rm{o}}} \right)}^{\rm{T}}}{\boldsymbol{\dot s}}_i^{\rm{o}}}}{{c\left\| {{{\boldsymbol{u}}^{\rm{o}}} - {\boldsymbol{s}}_i^{\rm{o}}} \right\|}} + {e_i} $$ (1) 式中,
$c$ 表示信号传播的速度;${e_i}$ 表示信号频率测量的估计误差。将$M$ 个接收站测得的目标辐射源信号频率联立得到一个向量:$$ {\boldsymbol{f}} = {\left[ {{f_1},{f_2}, \cdots ,{f_M}} \right]^{\rm{T}}} = {{\boldsymbol{f}}^{\rm{o}}} + {\boldsymbol{e}} $$ (2) 式中,
$ {{\boldsymbol{f}}^{\rm{o}}} $ 表示频率测量的真实值;$ {\boldsymbol{e}} $ 为频率测量误差向量。由于在频率测量过程中会受到接收机内部热噪声、测量精度等因素影响,故假设$ {\boldsymbol{e}} $ 呈均值为0、协方差为${{\boldsymbol{Q}}_e}$ 的高斯分布。在实际中,非合作目标辐射源发射信号的载波频率
$f_{\rm{c}}^{\rm{o}}$ 并不是准确已知的,通常可依据目标辐射源的先验信息并结合各接收站频率测量结果,确定估计值:$$ {f_{\rm{c}}} = f_{\rm{c}}^{\rm{o}} + \Delta {f_{\rm{c}}} $$ (3) 式中,假设载频估计误差
$ \Delta {f_{\rm{c}}} $ 服从均值为0、方差为$\sigma _{{f_{\rm{c}}}}^2$ 的高斯分布,这与文献[17]有主要区别。由于充分考虑了实际中无法准确获知目标辐射源所发射信号载波频率的情况,本文建立的模型更具有实用价值,结论也更具有一般性。在该定位模型下,无源定位的目标是在给定
$M$ 个频率测量值,并结合目标辐射源信号载波频率经验值$ {f_{\rm{c}}} $ 以及接收站的位置${{\boldsymbol{s}}^{\rm{o}}}$ 和速度${{\boldsymbol{\dot s}}^{\rm{o}}}$ 信息,在存在频率测量误差和载频估计误差的情况下,计算出目标位置${{\boldsymbol{u}}^{\rm{o}}}$ 。 -
CRLB是任一无偏估计值所能达到的最小方差界,反映了算法的优劣。在此,先对存在目标辐射源信号载频估计误差情况下的CRLB进行推导,然后再将其与无误差情况下的CRLB进行对比,分析存在该误差情况下,定位精度的恶化程度。
在定位过程中,待求量为
${{\boldsymbol{u}}^{\rm{o}}}$ ,观测量为${\boldsymbol{\alpha }} = {\left[ {{{\boldsymbol{f}}^{\rm{T}}},{f_{\rm{c}}}} \right]^{\rm{T}}}$ 。由于接收站无法准确获知目标辐射源的载频,因此,定位时的未知量为${{\boldsymbol{\varPhi }}^{\rm{o}}} = {\left[ {{{\boldsymbol{u}}^{{\rm{oT}}}},f_{\rm{c}}^{\rm{o}}} \right]^{\rm{T}}}$ 。假设${\boldsymbol{f}}$ 和${f_{\rm{c}}}$ 均服从高斯分布,且两者之间互相独立,可以得到:$$ \begin{split} &\ln f\left( {{\boldsymbol{\alpha }};{{\boldsymbol{\varPhi }}^{\rm{o}}}} \right) = \ln f\left( {{\boldsymbol{f}};{{\boldsymbol{\varPhi }}^{\rm{o}}}} \right) + \ln f\left( {{f_{\rm{c}}};{{\boldsymbol{\varPhi }}^{\rm{o}}}} \right) = \hfill \\ &k - \frac{1}{2}{\left( {{\boldsymbol{f}} - {{\boldsymbol{f}}^{\rm{o}}}} \right)^{\rm{T}}}{\boldsymbol{Q}}_{\rm{e}}^{ - 1}\left( {{\boldsymbol{f}} - {{\boldsymbol{f}}^{\rm{o}}}} \right) - \frac{1}{2}{\left( {{f_{\rm{c}}} - f_{\rm{c}}^{\rm{o}}} \right)^2}\sigma _{{f_{\rm{c}}}}^2 \hfill \end{split} $$ (4) 式中,
$k$ 是常数;$ {{\boldsymbol{f}}^{\rm{o}}} $ 是关于目标位置${{\boldsymbol{u}}^{\rm{o}}}$ 的函数。将$ \ln f\left( {{\boldsymbol{\alpha }};{{\boldsymbol{\varPhi }}^{\rm{o}}}} \right) $ 对$ {{\boldsymbol{\varPhi }}^{\rm{o}}} $ 进行两次求导,随后对其求期望、取逆、求相反数,可以得到CRLB的表达式:$$ \begin{split} & {{\rm{CRLB}}} \left( {{{\boldsymbol{\varPhi }}^{\rm{o}}}} \right) = - {\rm{E}}{\left[ {\frac{{{\partial ^2}\ln f\left( {{\boldsymbol{\alpha }};{{\boldsymbol{\varPhi }}^{\rm{o}}}} \right)}}{{\partial {{\boldsymbol{\varPhi }}^{\rm{o}}}\partial {{\boldsymbol{\varPhi }}^{{\rm{o}}{\rm{T}}}}}}} \right]^{ - 1}} = \hfill \\ & \qquad\qquad {\left[ {\begin{array}{*{20}{c}} {\boldsymbol{X}}&{\boldsymbol{Y}} \\ {{{\boldsymbol{Y}}^{\rm{T}}}}&{\boldsymbol{Z}} \end{array}} \right]^{ - 1}} \hfill \end{split} $$ (5) 式中,
$$ {\boldsymbol{X}} = - {\rm{E}}\left[ {\frac{{{\partial ^2}\ln f\left( {{\boldsymbol{\alpha }};{{\boldsymbol{\varPhi }}^{\rm{o}}}} \right)}}{{\partial {{\boldsymbol{u}}^{\rm{o}}}\partial {{\boldsymbol{u}}^{{\rm{oT}}}}}}} \right] = \frac{{\partial {{\boldsymbol{f}}^{{\rm{oT}}}}}}{{\partial {{\boldsymbol{u}}^{\rm{o}}}}}{\boldsymbol{Q}}_e^{ - 1}\frac{{\partial {{\boldsymbol{f}}^{\rm{o}}}}}{{\partial {{\boldsymbol{u}}^{{\rm{oT}}}}}} $$ (6) $$ {\boldsymbol{Y}} = - {\rm{E}}\left[ {\frac{{{\partial ^2}\ln f\left( {{\boldsymbol{\alpha }};{{\boldsymbol{\varPhi }}^{\rm{o}}}} \right)}}{{\partial {{\boldsymbol{u}}^{\rm{o}}}\partial f_{\rm{c}}^{{\rm{oT}}}}}} \right] = \frac{{\partial {{\boldsymbol{f}}^{{\rm{oT}}}}}}{{\partial {{\boldsymbol{u}}^{\rm{o}}}}}{\boldsymbol{Q}}_e^{ - 1}\frac{{\partial {{\boldsymbol{f}}^{\rm{o}}}}}{{\partial f_{\rm{c}}^{\rm{o}}}} $$ (7) $$ {\boldsymbol{Z}} = - {\rm{E}}\left[ {\frac{{{\partial ^2}\ln f\left( {{\boldsymbol{\alpha }};{{\boldsymbol{\varPhi }}^{\rm{o}}}} \right)}}{{\partial f_{\rm{c}}^{{\rm{o}}2}}}} \right] = \sigma _{{f_{\rm{c}}}}^{ - 2} $$ (8) 其中
$$ \frac{{\partial {{\boldsymbol{f}}^{\rm{o}}}}}{{\partial {{\boldsymbol{u}}^{{\rm{oT}}}}}} = {\left[ {\frac{{\partial f_1^{\rm{o}}}}{{\partial {{\boldsymbol{u}}^{{\rm{oT}}}}}},\frac{{\partial f_2^{\rm{o}}}}{{\partial {{\boldsymbol{u}}^{{\rm{oT}}}}}}, \cdots ,\frac{{\partial f_M^{\rm{o}}}}{{\partial {{\boldsymbol{u}}^{{\rm{oT}}}}}}} \right]^{\rm{T}}} $$ (9) $$ \frac{{\partial f_i^{\rm{o}}}}{{\partial {{\boldsymbol{u}}^{{\rm{oT}}}}}} = - \frac{{f_c^{\rm{o}}{\boldsymbol{\dot s}}_i^{\rm{T}}}}{{c\left\| {{{\boldsymbol{u}}^{\rm{o}}} - {\boldsymbol{s}}_i^{\rm{o}}} \right\|}}\left[ {{\boldsymbol{I}} - \left( {\frac{{{{\boldsymbol{u}}^{\rm{o}}} - {\boldsymbol{s}}_i^{\rm{o}}}}{{\left\| {{{\boldsymbol{u}}^{\rm{o}}} - {\boldsymbol{s}}_i^{\rm{o}}} \right\|}}} \right){{\left( {\frac{{{{\boldsymbol{u}}^{\rm{o}}} - {\boldsymbol{s}}_i^{\rm{o}}}}{{\left\| {{{\boldsymbol{u}}^{\rm{o}}} - {\boldsymbol{s}}_i^{\rm{o}}} \right\|}}} \right)}^{\rm{T}}}} \right] $$ (10) $$ \frac{{\partial {{\boldsymbol{f}}^{\rm{o}}}}}{{\partial f_{\rm{c}}^{\rm{o}}}} = {\left[ {\frac{{\partial f_1^{\rm{o}}}}{{\partial f_{\rm{c}}^{\rm{o}}}},\frac{{\partial f_2^{\rm{o}}}}{{\partial f_{\rm{c}}^{\rm{o}}}}, \cdots ,\frac{{\partial f_M^{\rm{o}}}}{{\partial f_{\rm{c}}^{\rm{o}}}}} \right]^{\rm{T}}} $$ (11) $$ \frac{{\partial f_i^{\rm{o}}}}{{\partial f_{\rm{c}}^{\rm{o}}}} = 1 - \frac{{{{\left( {{{\boldsymbol{u}}^{\rm{o}}} - {\boldsymbol{s}}_i^{\rm{o}}} \right)}^{\rm{T}}}{{{\boldsymbol{\dot s}}}_i}}}{{c\left\| {{{\boldsymbol{u}}^{\rm{o}}} - {\boldsymbol{s}}_i^{\rm{o}}} \right\|}} $$ (12) 通过调用分块矩阵反演公式[18],可得目标位置估计的CRLB为:
$$ \begin{split} & {{\rm{CRLB}}} \left( {{{\boldsymbol{u}}^{\rm{o}}}} \right) = {\left( {{\boldsymbol{X}} - {\boldsymbol{Y}}{{\boldsymbol{Z}}^{ - 1}}{{\boldsymbol{Y}}^{\rm{T}}}} \right)^{ - 1}} = \hfill \\ & {{\boldsymbol{X}}^{ - 1}} + {{\boldsymbol{X}}^{ - 1}}{\boldsymbol{Y}}{\left( {{\boldsymbol{Z}} - {{\boldsymbol{Y}}^{\rm{T}}}{{\boldsymbol{X}}^{ - 1}}{\boldsymbol{Y}}} \right)^{ - 1}}{{\boldsymbol{Y}}^{\rm{T}}}{{\boldsymbol{X}}^{ - 1}} \hfill \end{split} $$ (13) 式中,
$ {{\boldsymbol{X}}^{ - 1}} $ 表示不存在载波频率估计误差情况下对目标辐射源定位的CRLB;第二项表示的是受$\Delta {f_{\rm{c}}}$ 的影响产生的目标定位性能恶化程度。下面针对载波频率估计误差对目标定位CRLB的影响进行仿真分析。由于CRLB不仅与频率测量误差
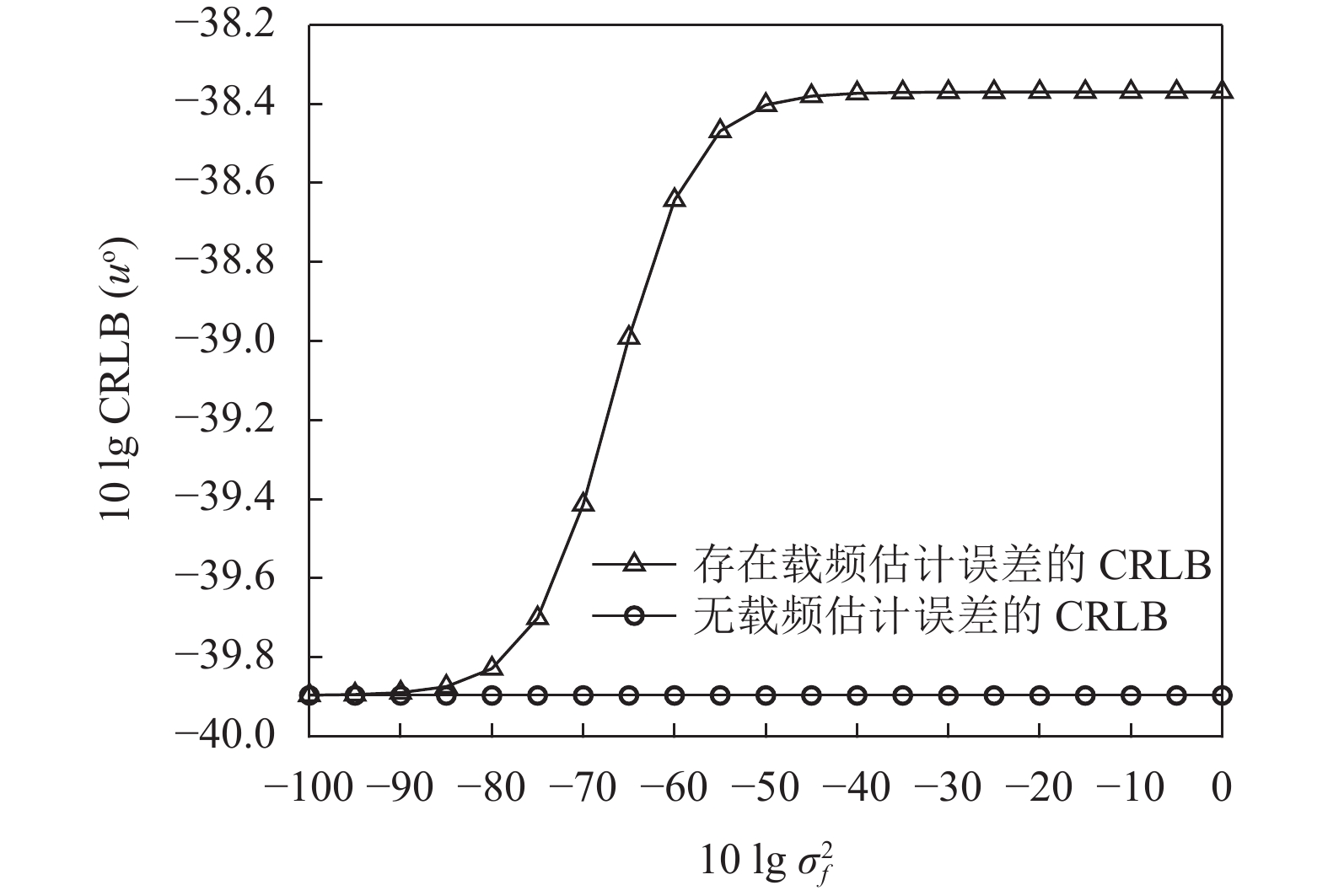
${\boldsymbol{e}}$ 和载波估计误差$\Delta {f_{\rm{c}}}$ 有关,还与目标与接收站之间的相对位置,即定位配置紧密相关。本文重点考察载波估计误差对CRLB的影响,因此,设置测量误差的协方差矩阵为某一固定值。同时,利用随机产生多组定位配置取平均的方法,降低特定的定位配置对CRLB的影响[19-20]。具体仿真环境如下:随机生成10组定位配置,目标分布在4×4 km2的矩形范围内,7个接收站分布在1.5×1.5 km2的矩形范围内,使得目标出现位置包括了处于各接收站之中和之外两种情况,进一步降低特定配置对CRLB的影响。为了避免不合理的布站影响定位精度,规定任意两接收站之间的距离不小于150 m,接收站的速度在0~100 m/s之间360°范围内随机分布。目标辐射源发射信号的载波频率$f_{\rm{c}}^{\rm{o}} = 2{\text{ GHz}}$ ,信号的传播速度为$c = 3 \times {10^8}{\text{ m/s}}$ ,接收站测量频率的协方差为${{\boldsymbol{Q}}_e} = {0.001^2}{{\boldsymbol{I}}_M}$ ,其中${{\boldsymbol{I}}_M}$ 是$M \times M$ 的单位矩阵。载频估计误差的变化范围为−100~0 dB。图1显示了在存在载频估计误差的情况下,当
$10\lg {\sigma _f^2} \leqslant - 90{\text{ dB}}$ 时,存在载频估计误差与无载频估计误差时的CRLB基本一致,当$10\lg {\sigma _f^2} > - 90{\text{ dB}}$ 时,存在载频估计误差的CRLB急剧增大,当$10\lg {\sigma _f^2} = - 40{\text{ dB}}$ 时,存在载频估计误差的CRLB逐渐稳定在−38.4 dB左右,其相较于无载频估计误差的CRLB增大了1.5 dB左右。
图 1 存在载频估计误差与无载频估计误差的CRLB比较
从仿真中可以看出,当载频估计误差增大到一定程度以后,将会对目标定位性能造成至少1.5 dB的恶化。因此,为了获得更好的目标定位效果,在定位过程中,需要考虑载频估计误差对目标定位精度的影响。
-
目标位置
${{\boldsymbol{u}}^{\rm{o}}}$ 与接收站对目标辐射源信号频率测量值$ {f_i} $ 之间呈高度的非线性关系,如式(1)所示。令第$i$ 个接收站到目标的距离为$r_i^{\rm{o}} = \left\| {{{\boldsymbol{u}}^{\rm{o}}} - {\boldsymbol{s}}_i^{\rm{o}}} \right\|$ ,将式(3)代入式(1),得到第$i$ 个接收站的频率测量值为:$$ {f_i} = {f_c} - \frac{{{f_c}{{\left( {{{\boldsymbol{u}}^{\rm{o}}} - {\boldsymbol{s}}_i^{\rm{o}}} \right)}^{\rm{T}}}{\boldsymbol{\dot s}}_i^{\rm{o}}}}{{cr_i^{\rm{o}}}} + \frac{c}{{{f_{\rm{c}}}}}{\varepsilon _i} $$ (14) 式中,
$ {\varepsilon _i} $ 为误差项,其值为:$$ {\varepsilon _i} = \left[ {\frac{{{{\left( {{{\boldsymbol{u}}^{\rm{o}}} - {\boldsymbol{s}}_i^{\rm{o}}} \right)}^{\rm{T}}}{\boldsymbol{\dot s}}_i^{\rm{o}}}}{{cr_i^{\rm{o}}}} - 1} \right]\Delta {f_{\rm{c}}} + {e_i} $$ (15) 令
${d_i} = {{c\left( {{f_i} - {f_{\rm{c}}}} \right)} \mathord{\left/ {\vphantom {{c\left( {{f_i} - {f_{\rm{c}}}} \right)} {{f_{\rm{c}}}}}} \right. } {{f_{\rm{c}}}}}$ ,经过简单的运算,式(14)可改写为:$$ \left( {{d_i} - \frac{{c{\varepsilon _i}}}{{{f_{\rm{c}}}}}} \right)r_i^{\rm{o}} = - {\left( {{{\boldsymbol{u}}^{\rm{o}}} - {\boldsymbol{s}}_i^{\rm{o}}} \right)^{\rm{T}}}{\mathbf{\dot s}}_i^{\rm{o}} $$ (16) 对式(16)两边平方,忽略高阶误差项,整理得:
$$ \begin{split} & \;\;\;\;\; 2\left( {{c \mathord{\left/ {\vphantom {c {{f_{\rm{c}}}}}} \right. } {{f_{\rm{c}}}}}} \right){d_i}r_i^{{\rm{o}}2}{\varepsilon _i} = d_i^2{\left\| {{\boldsymbol{s}}_i^{\rm{o}}} \right\|^2} - {\left( {{\boldsymbol{s}}_i^{{\rm{oT}}}{\boldsymbol{\dot s}}_i^{\rm{o}}} \right)^2} -\hfill \\ & 2\left( {d_i^2{\boldsymbol{s}}_i^{{\rm{oT}}} - {\boldsymbol{s}}_i^{{\rm{oT}}}{\boldsymbol{\dot s}}_i^{\rm{o}}{\boldsymbol{\dot s}}_i^{{\rm{oT}}}} \right){{\boldsymbol{u}}^{\rm{o}}} - \left( {\dot x_i^{{\rm{o}}2} - d_i^2} \right){x^{{\rm{o}}2}} -\hfill \\ & \;\;\;\;\;\;\;\;\;\; \left( {\dot y_i^{{\rm{o}}2} - d_i^2} \right){y^{{\rm{o}}2}} - 2\dot x_i^{\rm{o}}\dot y_i^{\rm{o}}{x^{\rm{o}}}{y^{\rm{o}}} \end{split} $$ (17) 将
$M$ 个接收站的测量结果表示成矩阵形式,得:$$ {\boldsymbol{B}}{\boldsymbol{\varepsilon }} = {\boldsymbol{h}} - {\boldsymbol{A}}{{\boldsymbol{\varphi}}^{\rm{o}}} $$ (18) 式中,
${{\boldsymbol{\varphi}}^{\rm{o}}} = {\left[ {{{\boldsymbol{u}}^{{\rm{oT}}}},{x^{{\rm{o}}2}},{y^{{\rm{o}}2}},{x^{\rm{o}}}{y^{\rm{o}}}} \right]^{\rm{T}}}$ 是待求的未知量;${\boldsymbol{A}}$ 为未知量的系数矩阵;其每一行的元素为${\boldsymbol{A}}\left( {i,:} \right) = \left[ {2\left( {d_i^2{\boldsymbol{s}}_i^{{\rm{oT}}} - {\boldsymbol{s}}_i^{{\rm{oT}}}{\boldsymbol{\dot s}}_i^{\rm{o}}{\boldsymbol{\dot s}}_i^{{\rm{oT}}}} \right), {\dot x_i^{{\rm{o}}2} - d_i^2} ,} \right.$ $\left. { {\dot y_i^{{\rm{o}}2} - d_i^2} ,2\dot x_i^{\rm{o}}\dot y_i^{\rm{o}}} \right]$ ;${\boldsymbol{h}}$ 是常数列向量,其每个元素的值为${\boldsymbol{h}}\left( i \right) = d_i^2{\left\| {{\boldsymbol{s}}_i^{\rm{o}}} \right\|^2} - {\left( {{\boldsymbol{s}}_i^{{\rm{oT}}}{\boldsymbol{\dot s}}_i^{\rm{o}}} \right)^2}$ ;${\boldsymbol{\varepsilon }} = {\boldsymbol{b}}\Delta {f_{\rm{c}}} + {\boldsymbol{e}}$ 为误差项,其中${\boldsymbol{b}}\left( i \right) = [ {{( {{{\boldsymbol{u}}^{\rm{o}}} - {\boldsymbol{s}}_i^{\rm{o}}})}^{\rm{T}}} \times {\boldsymbol{\dot s}}_i^{\rm{o}} / {cr_i^{\rm{o}}} ] - 1$ ;${\boldsymbol{B}} = 2\left( {{c / {{f_c}}}} \right){{\rm{diag}}} \left\{ {\left[ {{d_1}r_1^{{\rm{o}}2},{d_2}r_2^{{\rm{o}}2}, \cdots ,{d_M}r_M^{{\rm{o}}2}} \right]} \right\}$ 为误差项系数。${\boldsymbol{\varepsilon }}$ 的协方差矩阵可以表示为:$$ {{\boldsymbol{Q}}_\varepsilon } = {\boldsymbol{b}}{{\boldsymbol{b}}^{\rm{T}}}{\sigma _{\Delta {f_{\rm{c}}}}} + {{\boldsymbol{Q}}_{\rm{e}}} $$ (19) 对式(18)进行求解,得到
${{\boldsymbol{\varphi}}^{\rm{o}}}$ 的加权最小二乘估计值为:$$ {\boldsymbol{\varphi}} = {\left( {{{\boldsymbol{A}}^{\rm{T}}}{\boldsymbol{WA}}} \right)^{ - 1}}{{\boldsymbol{A}}^{\rm{T}}}{\boldsymbol{Wh}} $$ (20) 式中,
${\boldsymbol{W}} = {{\boldsymbol{B}}^{ - {\rm{T}}}}{\rm{E}}{\left[ {{\boldsymbol{\varepsilon }}{{\boldsymbol{\varepsilon }}^{\rm{T}}}} \right]^{ - 1}}{{\boldsymbol{B}}^{ - 1}} = {{\boldsymbol{B}}^{ - {\rm{T}}}}{\boldsymbol{Q}}_\varepsilon ^{ - 1}{{\boldsymbol{B}}^{ - 1}}$ 。其协方差矩阵为:$$ {{\rm{cov}}} \left( {\boldsymbol{\varphi}} \right) = {\left( {{{\boldsymbol{A}}^{\rm{T}}}{\boldsymbol{WA}}} \right)^{ - 1}} $$ (21) 在计算估计值
$ {\boldsymbol{\varphi}} $ 的过程中,误差项系数$ {\boldsymbol{B}} $ 与目标位置有关,而这是未知的。因此,本文采用与文献[21]相同的方法,先假设${\boldsymbol{W}} = {\boldsymbol{I}}$ ,代入式(20)求解出目标位置的粗略估计,再利用其计算$ {\boldsymbol{B}} $ ,重新求解式(20),求得$ {\boldsymbol{\varphi}} $ 值。观察
${{\boldsymbol{\varphi}}^{\rm{o}}} = {\left[ {{{\boldsymbol{u}}^{{\rm{oT}}}},{x^{{\rm{o}}2}},{y^{{\rm{o}}2}},{x^{\rm{o}}}{y^{\rm{o}}}} \right]^{\rm{T}}}$ 可知,其中不仅含有目标的位置${{\boldsymbol{u}}^o}$ ,还含有目标位置的二阶项${x^{{\rm{o}}2}}$ 、${y^{{\rm{o}}2}}$ 、${x^{\rm{o}}}{y^{\rm{o}}}$ 。它们之间存在如下关系:$$ {x^{{\rm{o}}2}} = {{\boldsymbol{u}}^{{\rm{o}}2}}\left( 1 \right) $$ (22) $$ {y^{{\rm{o}}2}} = {{\boldsymbol{u}}^{{\rm{o}}2}}\left( 2 \right) $$ (23) $$ {x^{\rm{o}}}{y^{\rm{o}}} = {{\boldsymbol{u}}^{\rm{o}}}\left( 1 \right){{\boldsymbol{u}}^{\rm{o}}}\left( 2 \right) $$ (24) 考虑到式(20)所得的加权最小二乘估计误差,有
${\boldsymbol{\varphi}} = {{\boldsymbol{\varphi}}^{\rm{o}}} + \Delta {\boldsymbol{\varphi}}$ ,将其代入式(22)、式(23)和式(24),忽略掉高阶误差项,有:$$ - {\boldsymbol{\varphi}}\left( 1 \right)\Delta {\boldsymbol{\varphi}}\left( 1 \right) + \Delta {\boldsymbol{\varphi}}\left( 3 \right) = {\boldsymbol{\varphi}}\left( 3 \right) - {\boldsymbol{\varphi}}\left( 1 \right){{\boldsymbol{u}}^{\rm{o}}}\left( 1 \right) $$ (25) $$- {\boldsymbol{\varphi}}\left( 2 \right)\Delta {\boldsymbol{\varphi}}\left( 2 \right) + \Delta {\boldsymbol{\varphi}}\left( 4 \right) = {\boldsymbol{\varphi}}\left( 4 \right) - {\boldsymbol{\varphi}}\left( 2 \right){{\boldsymbol{u}}^{\rm{o}}}\left( 2 \right) $$ (26) $$ - \frac{1}{2}{\boldsymbol{\varphi}}\left( 1 \right)\Delta {\boldsymbol{\varphi}}\left( 2 \right) - \frac{1}{2}{\boldsymbol{\varphi}}\left( 2 \right)\Delta {\boldsymbol{\varphi}}\left( 1 \right) + \Delta {\boldsymbol{\varphi}}\left( 5 \right)= $$ $$ {\boldsymbol{\varphi}}\left( 5 \right) - \frac{1}{2}{\boldsymbol{\varphi}}\left( 2 \right){{\boldsymbol{u}}^{\rm{o}}}\left( 1 \right) - \frac{1}{2}{\boldsymbol{\varphi}}\left( 1 \right){{\boldsymbol{u}}^{\rm{o}}}\left( 2 \right) $$ (27) 结合:
$$ \Delta {\boldsymbol{\varphi}}\left( {1:2} \right) = {\boldsymbol{\varphi}}\left( {1:2} \right) - {{\boldsymbol{u}}^{\rm{o}}} $$ (28) 有:
$$ {\boldsymbol{F}}\Delta {\boldsymbol{\varphi}} = {\boldsymbol{\varphi}} - {\boldsymbol{D}}{{\boldsymbol{u}}^{\rm{o}}} $$ (29) 式中,
$$ {\boldsymbol{D}} = \left[ {\begin{array}{*{20}{c}} 1&0 \\ 0&1 \\ {{\boldsymbol{\varphi}}\left( 1 \right)}&0 \\ 0&{{\boldsymbol{\varphi}}\left( 2 \right)} \\ {\dfrac{{{\boldsymbol{\varphi}}\left( 2 \right)}}{2}}&{\dfrac{{{\boldsymbol{\varphi}}\left( 1 \right)}}{2}} \end{array}} \right],{\boldsymbol{F}} = \left[ {\begin{array}{*{20}{c}} 1&0&0&0&0 \\ 0&1&0&0&0 \\ { - {\boldsymbol{\varphi}}\left( 1 \right)}&0&1&0&0 \\ 0&{ - {\boldsymbol{\varphi}}\left( 2 \right)}&0&1&0 \\ { - \dfrac{{{\boldsymbol{\varphi}}\left( 2 \right)}}{2}}&{ - \dfrac{{{\boldsymbol{\varphi}}\left( 1 \right)}}{2}}&0&0&1 \end{array}} \right] $$ (30) 对式(29)进行求解,加权最小二乘估计为:
$$ {\boldsymbol{u}} = {\left( {{{\boldsymbol{D}}^{\rm{T}}}{\boldsymbol{GD}}} \right)^{ - 1}}{{\boldsymbol{D}}^{\rm{T}}}{\boldsymbol{G }}{\boldsymbol{\varphi}} $$ (31) 式中,
$$ {\boldsymbol{G}} = {{\boldsymbol{F}}^{ - {\rm{T}}}}{{\rm{cov}}} {\left( {\boldsymbol{\varphi}} \right)^{ - 1}}{{\boldsymbol{F}}^{ - 1}} $$ (32) -
下面分析目标定位估计值
$ {\boldsymbol{u}} $ 的无偏性并计算其MSE值。从式(31)可知,目标定位估计值由矩阵${\boldsymbol{D}}$ 、${\boldsymbol{G}}$ 以及${\boldsymbol{\varphi}}$ 确定。先分析估计值${\boldsymbol{\varphi}}$ 的无偏性。结合式(18)和式(20),可得:$$ {\rm{E}}\left( {\Delta {\boldsymbol{\varphi}}} \right) = {\rm{E}}\left[ {{{\left( {{{\boldsymbol{A}}^{\rm{T}}}{\boldsymbol{WA}}} \right)}^{ - 1}}{{\boldsymbol{A}}^{\rm{T}}}{\boldsymbol{WB}}{\boldsymbol{\varepsilon }}} \right] = {{0}} $$ (33) 式中,矩阵
${\boldsymbol{A}}$ 为常数项;假设矩阵${\boldsymbol{W}}$ 和${\boldsymbol{B}}$ 中的误差足够小,可以忽略,并利用${\boldsymbol{\varepsilon }} = {\boldsymbol{b}}\Delta {f_{\rm{c}}} + {\boldsymbol{e}}$ ,且载频估计误差$\Delta {f_{\rm{c}}}$ 和频率测量误差${\boldsymbol{e}}$ 都是均值为0的高斯变量。因此,估计值${\boldsymbol{\varphi}}$ 是对${{\boldsymbol{\varphi}}^{\rm{o}}}$ 的无偏估计。同样地,计算
$ {\boldsymbol{u}} $ 的无偏性。结合式(29)和式(31),可得:$$ \begin{split} & {\rm{E}}\left( {\Delta {\boldsymbol{u}}} \right) = {\rm{E}}\left[ {{{\left( {{{\boldsymbol{D}}^{\rm{T}}}{\boldsymbol{GD}}} \right)}^{ - 1}}{{\boldsymbol{D}}^{\rm{T}}}{\boldsymbol{GF}}\Delta {\boldsymbol{\varphi}}} \right] = \hfill \\ & {\left( {{{\boldsymbol{D}}^{\rm{T}}}{\boldsymbol{GD}}} \right)^{ - 1}}{{\boldsymbol{D}}^{\rm{T}}}{\boldsymbol{GF}}{\boldsymbol{E}}\left( {\Delta {\boldsymbol{\varphi}}} \right) = {{0}} \end{split} $$ (34) 由式(34)可知,
$ {\boldsymbol{u}} $ 是对$ {{\boldsymbol{u}}^{\rm{o}}} $ 的无偏估计。下面计算
$ {\boldsymbol{u}} $ 的协方差。结合式(32)和式(34),可得:$$ {{\rm{cov}}} \left( {\boldsymbol{u}} \right) = {\left( {{{\boldsymbol{D}}^{\rm{T}}}{\boldsymbol{GD}}} \right)^{ - 1}} $$ (35) $ {\boldsymbol{u}} $ 的MSE值为协方差矩阵${{\rm{cov}}} \left( {\boldsymbol{u}} \right)$ 的对角线元素求和,表示了该估计结果偏离目标真实位置的均方差值。 -
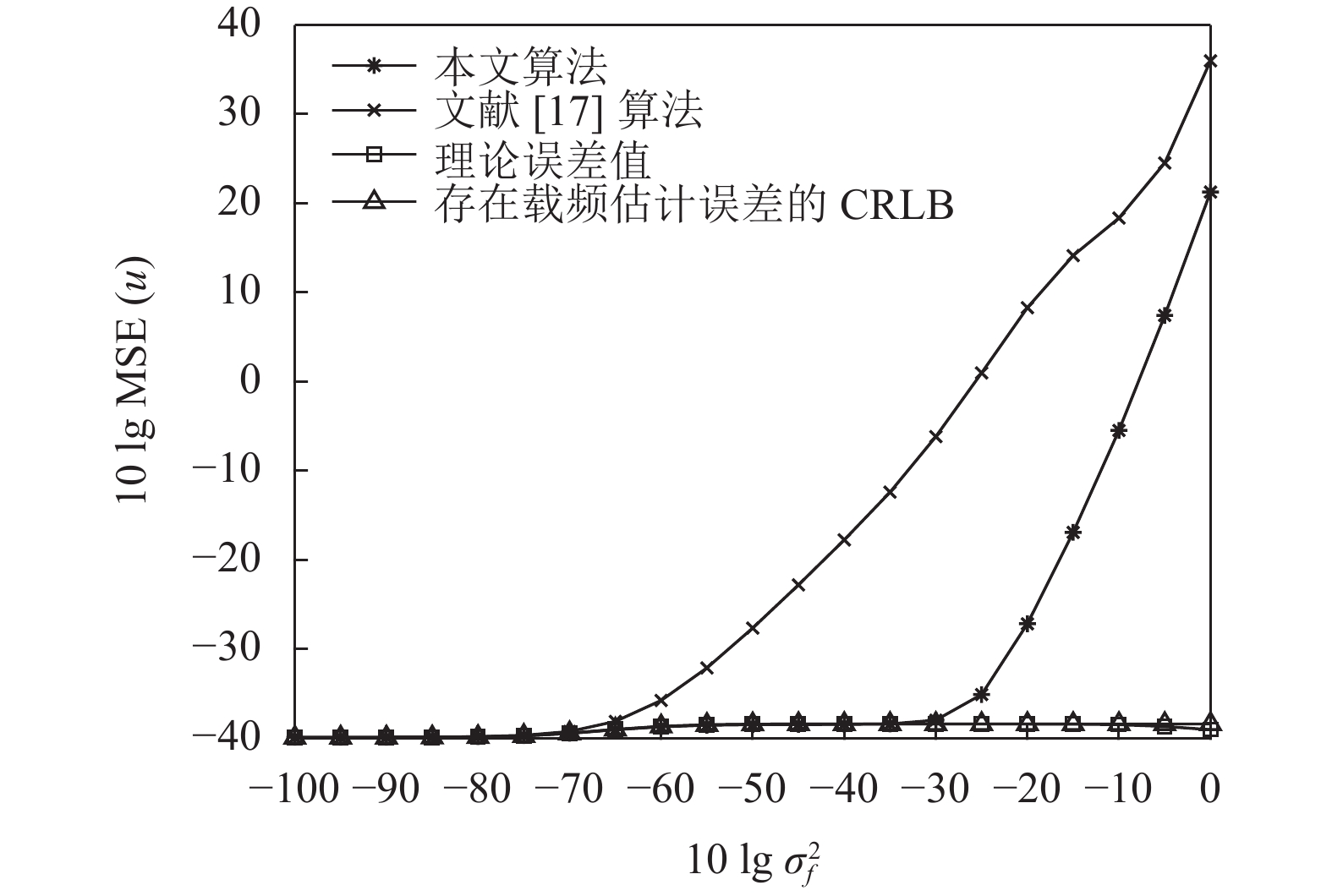
为了检验本文算法的有效性,将本文算法与文献[17]算法进行比较,此算法未考虑载频估计误差对定位精度的影响。仿真环境的设置与CRLB部分相同。采用10组定位配置,每组定位配置下进行1 000次蒙特卡洛仿真。用目标定位MSE值来衡量定位性能,定义为:
$$ {{\rm{MSE}}} \left( {\boldsymbol{u}} \right) = \frac{{\displaystyle\sum\limits_{i = 1}^{10} {\displaystyle\sum\limits_{j = 1}^{1000} {{{\left( {{{{\boldsymbol{\hat u}}}_{ij}} - {\boldsymbol{u}}_i^{\rm{o}}} \right)}^2}} } }}{{10000}} $$ (36) 由式(31)估计
$ {{\boldsymbol{\hat u}}_{ij}} $ ,其下标i和j分别表示第i组定位配置下,第j次仿真实验对目标的定位结果,$ {\boldsymbol{u}}_i^{\rm{o}} $ 表示第i组定位配置下目标的真实位置。仿真结果如图2所示。
图 2 不同算法的定位性能仿真
从图2可以看出,由目标估计的理论MSE值与CRLB值基本一致,说明在小噪声的假设条件下,本算法的定位精度能够达到CRLB。当
$10\lg {\sigma _f^2} \leqslant - 70{\text{ dB}}$ 时,本文算法与文献[17]算法都达到了CRLB,说明在载频估计误差较小时,两种方法都能够达到最优的定位性能。当$10\lg {\sigma _f^2} > - 70{\text{ dB}}$ 时,文献[17]算法开始迅速偏离CRLB,直到$10\lg {\sigma _f^2} > - 30{\text{ dB}}$ ,即当载频估计误差的方差增大10 000倍时,本文算法才开始偏离CRLB和理论误差值,且偏离的程度远小于文献[17]算法,说明:1) 在存在一定的载频估计误差时,即使该影响因素对于CRLB的影响只有大约1.5 dB,但是,若在定位过程中忽略该影响因素,那么定位的结果会急剧恶化,当
$10\lg {\sigma _f^2} = - 30{\text{ dB}}$ 时,文献[17]算法偏离CRLB 高于30 dB;2) 在定位过程中,本文算法合理地考虑了载频估计误差的影响,其较文献[17]算法推迟了将近40 dB才开始偏离CRLB,证明本文算法在存在载频估计误差时,具有较强的鲁棒性,定位性能较好。
3) 理论MSE值是在小噪声条件下得到的,即当
$10\lg {\sigma _f^2} > - 30{\text{ dB}}$ 时,小噪声条件已经无法满足,式(35)的结果需要进行修正,此时,需要进一步考虑高阶误差量,以提升定位精度。 -
在非合作的环境下,目标辐射源信号的载频并不是精确已知的,在利用多普勒频移参数进行无源定位时,载频估计误差不可避免。本文首先推导了载频估计误差对CRLB的影响;随后,构建了在存在载频估计误差下的基于多普勒频移的无源定位模型,提出了一种考虑载频估计误差的多普勒频移无源定位算法,此算法具有解析解的形式,无需迭代,计算简单;通过理论推导,得到了此算法理论上的MSE值。最后仿真实验显示载频估计误差会极大地恶化目标的定位性能,本文算法相较于忽略载频估计误差的方法,具有较强的鲁棒性,且定位精度较高。
Source Localization Using Doppler Frequency Shift with Erroneous Carrier Frequency
-
摘要: 针对非合作环境下目标辐射源信号载频估计存在误差的问题,提出了一种基于多普勒频移的无源定位算法。该算法充分考虑目标辐射源信号载频估计误差的影响,推导了在存在载频估计误差下的克拉美罗界(Cramer-Rao lower bound,CRLB),并将该算法与忽略载频估计误差的算法进行比较。仿真实验发现,在存在载频误差的情况下,即使对于CRLB的影响只是1.5 dB左右,但若在目标定位时忽略该影响因素,会导致定位精度急剧下降。当忽略载频估计误差的算法开始偏离CRLB时,该算法仍能达到CRLB,且当噪声增大近40 dB后,才开始偏离CRLB。证明该算法具有较强的鲁棒性,且定位精度较高。Abstract: In the non-cooperative scenario where the carrier frequency is not known exactly, the source localization using Doppler frequency shift is investigated. By taking the erroneous carrier frequency into account, a source localization algorithm is proposed based on Doppler frequency shift. The Cramer-Rao lower bound (CRLB) with erroneous carrier frequency is derived firstly, and then the proposed source localization algorithm is compared with the one ignoring erroneous carrier frequency. By simulations, it is found that although the CRLB with erroneous carrier frequency is 1.5 dB worse than the one without erroneous carrier frequency, the performance of the source localization algorithm ignoring erroneous carrier frequency deteriorates sharply. When the source localization algorithm ignoring erroneous carrier frequency starts to deviate from the CRLB, the proposed source localization algorithm can still reach the CRLB. It is not until the noise increases by nearly 40 dB that the proposed source localization algorithm begins to deviate from the CRLB. This proves that the proposed source localization algorithm is more robust and accuracy.
-
[1] 李明哲, 李小将, 李志亮. 基于FDOA的无源定位算法研究现状与展望[J]. 兵工自动化, 2019, 38(4): 28-34. LI M Z, LI X J, LI Z L. Research status and prospect of passive localization methods based on frequency difference of arrival[J]. Ordnance Industry Automation, 2019, 38(4): 28-34. [2] LIU M, GAO W C, ZHAO Y. An efficient estimator for source localization using TD and AOA measurements in MIMO radar systems[J]. IEEE Sensors Letters, 2021, 5(3): 1-4. [3] JIANG F, ZHANG Z, NAJAFABADI H E, et al. Underwater TDOA/FDOA joint localization method based on cross-ambiguity function[J]. IET Radar, Sonar & Navigation, 2020, 14(8): 1256-1266. [4] SNEHA V, NAGARAJAN M. Localization in wireless sensor networks: A review[J]. Cybernetics and Information Technologies, 2020, 20(4): 3-26. doi: 10.2478/cait-2020-0044 [5] 李金洲, 郭福成. 传感器位置误差条件下仅用到达频率差的无源定位性能分析[J]. 航空学报, 2011, 32(8): 1497-1505. LI J Z, GUO F C. Performance analysis for passive source localization using merely FDOA measurements with erroneous receiver positions[J]. Acta Aeronautica Sinica, 2011, 32(8): 1497-1505. [6] 邓丽娟. 基于多普勒频移的运动多站无源定位技术研究[D]. 成都: 电子科技大学, 2019. DENG L J. Research on passive localization based on doppler frequency shift of multiple moving receivers[D]. Chengdu: University of Electronic Science and Technology of China, 2019. [7] CHAN Y T, JARDINE F L. Target localization and tracking from doppler-shift measurements[J]. IEEE Journal of Oceanic Engineering, 1990, 15(3): 251-257. doi: 10.1109/48.107154 [8] CHAN Y T, TOWERS J J. Passive localization from Doppler-shifted frequency measurements[J]. IEEE Transactions on Signal Processing, 1992, 40(10): 2594-2598. doi: 10.1109/78.157301 [9] WANCHUN L, QIU T, CHENGFENG H, et al. Location algorithms for moving target in non-coherent distributed multiple-input multiple-output radar systems[J]. IET Signal Processing, 2017, 11(5): 503-514. doi: 10.1049/iet-spr.2016.0323 [10] LIU C, YUN J. A joint TDOA/FDOA localization algorithm using bi-iterative method with optimal step length[J]. Chinese Journal of Electronics, 2021, 30(1): 119-126. doi: 10.1049/cje.2020.11.009 [11] 李华. 多站差分多普勒定位技术[J]. 电子对抗技术, 1998, 13(6): 15-22. LI H. Multi-station source location technology using difference of doppler frequency[J]. Electronic Countermeasure Technology, 1998, 13(6): 15-22. [12] 张威, 吴佟, 张更新. 一种最大似然网格搜索卫星FDOA辐射源定位算法[J]. 无线电通信技术, 2014, 40(3): 58-60. doi: 10.3969/j.issn.1003-3114.2014.03.016 ZHANG W, WU T, ZHANG G X. A maximum likelihood grid search geolocation algorithm using satellites FDOA measurements[J]. Radio Communications Technology, 2014, 40(3): 58-60. doi: 10.3969/j.issn.1003-3114.2014.03.016 [13] KALANTARI A, MALEKI S, CHATZINOTAS S, et al. Frequency of arrival-based interference localization using a single satellite[C]//2016 8th Advanced Satellite Multimedia Systems Conference and the 14th Signal Processing for Space Communications Workshop. Spain: IEEE, 2016: 1-6. [14] WANG Y, WU Y. An efficient semidefinite relaxation algorithm for moving source localization using TDOA and FDOA measurements[J]. IEEE Communications Letters, 2016, 21(1): 80-83. [15] LI J Z, GUO F, JIANG W. A linear-correction least-squares approach for geolocation using FDOA measurements only[J]. Chinese Journal of Aeronautics, 2012, 25(5): 709-714. doi: 10.1016/S1000-9361(11)60437-8 [16] SHEHU Y A, MUHAMMAD S, KABIR M T, et al. Reference sensor selection for improved instantaneous velocity estimation using frequency difference of arrival measurement[J]. Journal of Science, Technology & Education, 2017, 5(4): 117-125. [17] DENG L, WEI P, DU Y, et al. An effective and simple solution for stationary target localization using doppler frequency shift measurements[J]. IEICE Transactions on Fundamentals of Electronics, Communications and Computer Sciences, 2017, E100(A): 1070-1073. [18] 张贤达. 矩阵分析与应用 [M]. 北京: 清华大学出版社, 2013. ZHANF X D. Matrix analysis and applications[M]. Beijing: Tsinghua University Press, 2013. [19] NGUYEN N H, DOGANCAY K. Optimal sensor placement for Doppler shift target localization[C]//Proceedings of the Radar Conference. Arlington: IEEE, 2015: 1677-1682. [20] SHAMES I, BISHOP A N, SMITH M, et al. Doppler shift target localization[J]. IEEE Transactions on Aerospace and Electronic Systems, 2013, 49(1): 266-276. doi: 10.1109/TAES.2013.6404102 [21] NOROOZI A, OVEIS A H, HOSSEINI S M, et al. Improved algebraic solution for source localization from TDOA and FDOA measurements[J]. IEEE Wireless Communications Letters, 2018, 7(3): 352-355. doi: 10.1109/LWC.2017.2777995 -

 点击查看大图
点击查看大图
图(2)
计量
- 文章访问数: 3699
- HTML全文浏览量: 1039
- PDF下载量: 55
- 被引次数: 0








































































































































