 ISSN
ISSN 


 下载:
下载:



-
复杂网络用来描述各类复杂系统中组件之间的交互,如大脑网络、经济网络、食物链网络、社交网络、交通网络等。复杂网络上的传播动力学研究通过建立传播模型,对现实中各类传播现象进行定量分析和定性解释,如谣言在人群中的扩散、计算机病毒通过电子邮件传播、流行病在接触网络中的传播等[1],有助于人们解释传播规律和预测关键的传播参量。其中一类传播可以用故障传播模型来描述[2]。如金融网络中少数核心国家的经济危机可能引发全球金融危机[3-4];电力网络中单个设备的故障将导致其他设备由于超载而相继故障,最终造成整个电网瘫痪[5];交通网络中,重要路段的拥堵会引发大面积交通堵塞[6]。故障传播[7-11]可能引发网络中节点的级联失效,最终导致整个系统不能正常运转。
大量的故障传播研究假定节点发生故障后不能恢复到正常状态,其与邻居节点的连边也不可恢复[12]。然而,现实世界中故障节点可能重新恢复正常运转[13]。如因极端天气导致铁路网络中个别线路故障时,维修人员会紧急修复发生故障的线路,以避免整个铁路系统受到大范围影响[14];生物的神经网络中,受损的神经元可以通过自我修复来恢复正常的生理活动[15]。上述过程可以用故障-恢复传播动力学模型来描述[16]。在该模型中,系统中的节点可能因其内在因素而发生内部故障。同时,节点也可能由外部因素引起的故障。发生内部故障和外部故障的节点以不同速率自发恢复。研究发现,故障-恢复传播动力学呈现出丰富的现象,如相变、磁滞和相位翻转[16]。一些工作利用平均场方法描述故障传播动力学过程[17],通过分析参数空间来确定系统的振荡区域[18]。相较于马尔可夫恢复过程,具有记忆效应的非马尔可夫恢复过程的故障-恢复传播模型具有抵抗大规模故障的能力[19]。
上述研究主要在静态网络上展开。实际上,代表个体的节点会根据自身和邻居的状态,发生自适应行为,从而改变网络的拓扑结构[20]。例如在疾病传播过程中,知晓疾病存在的健康人群会避免与感染者接触[21] 。这种现象可以用自适应网络上的疾病传播模型来描述。在该模型中,健康节点以一定速率主动断开与感染邻居节点的连边,并重新连向一个健康节点作为新邻居[22]或者待感染邻居恢复健康后重新与之建立连边[23]。研究发现,在自适应网络上的疾病传播动力学中出现了相变和磁滞现象,自适应行为能够使系统的流行阈值增加[22]。此外一些研究工作将自适应行为与非药物干预措施相结合,研究其对疾病传播动力学的影响。例如,将疫苗接种和自适应行为结合,发现在自适应网络上接种疫苗比在静态网络上接种疫苗更为有效[24];在自适应网络上,隔离策略的效果优于免疫策略[25]。在具有自适应行为的信息传播模型中,知情者与知情邻居断开联系并随机联系其他非知情节点作为新邻居的自适应行为能够使信息更广泛地传播[26-27]。在意识-疾病耦合的双层网络中,意识层的信息扩散会影响疾病层个体的自适应行为[28],由信息的快速扩散引起的个体自适应行为能够有效抑制疾病的传播。
在故障传播过程中,自适应行为也普遍存在。例如,当某条道路出现拥堵时,知晓拥堵的车辆会主动选择替代道路,避免更大规模的交通堵塞。考虑到个体具有根据周围环境状态主动改变自身连接的行为,本文构建自适应网络上的故障-恢复传播动力学模型,研究自适应行为对故障-恢复传播过程的影响。在该模型中,为了降低外部故障发生概率,活跃节点以一定速率主动断开与故障邻居的连边,直到故障邻居节点恢复后才重新连接。基于点对近似方法,我们推导了自适应网络上故障-恢复传播模型的传播动力学方程,理论结果与计算机仿真结果十分吻合。通过对比静态网络和自适应网络上的故障率随时间的演化图,我们发现自适应行为能有效避免节点发生外部故障,从而降低系统整体故障节点比例。自适应行为会影响故障-恢复传播模型的磁滞现象,并使系统由低故障到高故障状态的外部故障速率突变点增大。在自适应的断边速率和外部故障速率的共同作用下,系统出现了低故障区域、高故障区域和受初始故障节点比例影响的双稳态区域。
-
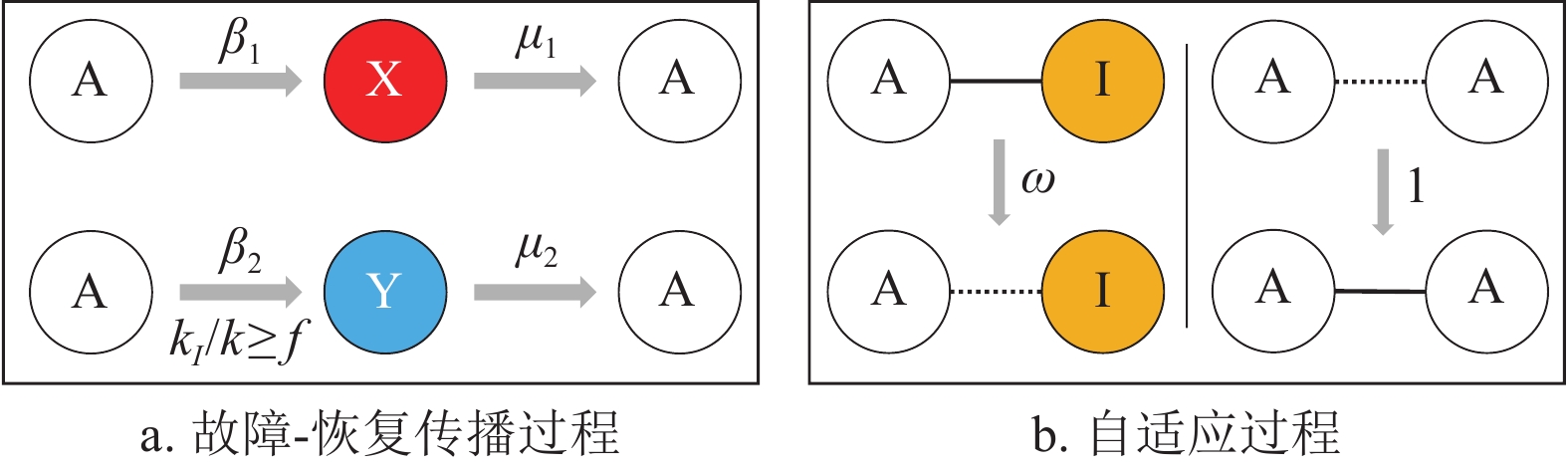
为揭示自适应行为对故障-恢复传播动力学的影响,本文建立了具有自适应行为的故障-恢复传播动力学模型,如图1所示。该传播模型包括故障-恢复传播过程和自适应过程。网络中的节点可能处于三种状态:活跃态(A)、内部故障状态(X)和外部故障状态(Y)。X状态和Y状态统称为故障态(I),也称为非活跃态。故障-恢复传播动力学过程如图1a所示,活跃态节点以
${\beta _1}$ 的速率发生内部故障,成为X态节点;内部故障状态节点以${\mu _1}$ 的速率自发恢复成A状态节点。当A状态节点的故障邻居节点比例大于$ f $ 时(即,${k_I}{\text{/}}k \geqslant f$ ;${k_I}$ 表示节点的故障邻居数,$k$ 表示节点的度),A状态节点以${\beta _2}$ 的速率发生外部故障,成为Y态节点;Y状态节点以${\mu _2}$ 的速率自发恢复成A状节点。阈值$ f $ 度量节点的故障态邻居节点对该节点的影响,$ f $ 越大表明更大比例的故障邻居才能引发节点发生外部故障。在现实世界中,网络节点能根据自身状况和周围环境来改变与周围邻居节点的连接。这种自适应行为可以用图1b来简单描述,即A态节点以$\omega $ 的速率断开与I态邻居节点的连边;待其I态邻居节点恢复成A态节点后,它们再以1的概率重新连接。I态节点不会主动断开和重新连接。当整个系统内三种节点的比例保持稳定时,故障传播达到稳态。
图 1 具有自适应行为的故障-恢复传播模型示意图
-
在本节中,我们运用点对近似方法建立自适应网络中故障-恢复传播动力学的演化方程,预测自适应网络中的故障节点比例随时间的演化及稳态故障比例。
-
点对近似方法用一组常微分方程描述传播模型的动力学行为,不仅刻画节点状态的变化,同时考虑存在连接的节点对中两个节点状态之间的关联性,能够更准确地描述网络中的动力学过程。我们基于点对近似方法,建立自适应网络的故障-恢复传播动力学模型。首先定义
$ {[U]_t} $ 为在t时刻不同类型的节点比例;$ {[UV]_t} $ 为在t时刻不同类型未断开连边的比例;$ \widetilde {{{[UV]}_t}} $ 为在t时刻不同类型已断开连边的比例;其中$ U,V \in \left\{ {A,X,Y} \right\} $ 。例如,$ {[A]_t} $ 为在t时刻A状态节点的比例;而$ {[AX]_t} $ 表示在t时刻未断开的AX类型连边的比例;$ \widetilde {{{[AX]}_t}} $ 表示在t时刻已断开的AX类型连边的比例。考虑网络中所有连边,则不同类型连边比例遵循守恒定律,即连边比例应该满足:$\displaystyle\sum\nolimits_{U,V \in \left\{ {A,X,Y} \right\}} ({[UV]_t} + \widetilde {{{[UV]}_t}}) = 1 $ (其中,$ {[UV]_t} = {[VU]_t} $ 和$ \widetilde {{{[UV]}_t}} = \widetilde {{{[VU]}_t}} $ ,$ U \ne V $ ),$ {[AI]_t} = {[AX]_t} + {[AY]_t} $ ,$ \widetilde {{{[AI]}_t}} = \widetilde {{{[AX]}_t}} + \widetilde {{{[AY]}_t}} $ 。$ {E_t} $ 代表A状态节点的故障邻居比例大于$ f $ 的概率;$ E_t^I $ 代表至少连接一个I状态节点的A状态节点的故障邻居比例大于$ f $ 的概率;$ E_t^A $ 代表至少连接一个A状态节点的A状态节点故障邻居比例大于$ f $ 的概率。不同类型节点和连边的比例的演化方程定义为式(1)~式(14),其中公式(1)-(3)为节点的演化方程,式(4)~式(9)为未断开边的演化方程,式(10)~式(14)为已断开边的演化方程。三种节点的演化方程为:$$ \left\{ {\begin{array}{*{20}{l}} {\dfrac{{d{{[A]}_t}}}{{dt}} = - \left( {{\beta _1} + {\beta _2}{E_t}} \right){{[A]}_t}+{\mu _1}{{[X]}_t} + {\mu _2}{{[Y]}_t}}&{(1)} \\ {\dfrac{{d{{[X]}_t}}}{{dt}} = {\beta _1}{{[A]}_t} - {\mu _1}{{[X]}_t}}&{(2)} \\ {\dfrac{{d{{[Y]}_t}}}{{dt}} = {\beta _2}{E_t}{{[A]}_t} - {\mu _2}{{[Y]}_t}}&{(3)} \end{array}} \right. $$ 在A状态节点的演化方程式(1)中,公式右边第一项表示由于A状态节点发生了内部故障和外部故障导致A状态节点减少的比例;第二项表示由于X状态节点恢复增加了A状态节点比例;第三项表示由于X状态节点恢复增加了A状态节点比例。其他节点演化方程同理。传播中未断开边的演化方程为:
$$ \left\{ {\begin{array}{*{20}{l}} \dfrac{{d{{[AX]}_t}}}{{dt}} = {\beta _1}{[AA]_t} - \left( {{\beta _1} + {\beta _2}E_t^I} \right){[AX]_t}\\ \quad + {\mu _1}{[XX]_t} + {\mu _2}{[YX]_t} - {\mu _1}{[AX]_t} - \omega {[AX]_t} & {(4)} \\ \dfrac{{d{{[AY]}_t}}}{{dt}} = {\beta _2}E_t^A{[AA]_t} - \left( {{\beta _1} + {\beta _2}E_t^I} \right){[AY]_t}\\ \quad + {\mu _1}{[XY]_t} + {\mu _2}{[YY]_t} - {\mu _2}{[AY]_t} - \omega {[AY]_t} &{(5)} \\ \dfrac{{d{{[AA]}_t}}}{{dt}} = - 2\left( {{\beta _1} + {\beta _2}E_t^A} \right){[AA]_t} + 2{\mu _1}{[AX]_t}\\ \quad + 2{\mu _2}{[AY]_t} + 2{\mu _1}\widetilde {{{[AX]}_t}} + 2{\mu _2}\widetilde {{{[AY]}_t}} & {(6)} \\ {\dfrac{{d{{[YY]}_t}}}{{dt}} = 2{\beta _2}E_t^I{{[AY]}_t} - 2{\mu _2}{{[YY]}_t}}&{(7)} \\ {\dfrac{{d{{[XX]}_t}}}{{dt}} = 2{\beta _1}{{[AX]}_t} - 2{\mu _1}{{[XX]}_t}}&{(8)} \\ {\dfrac{{d{{[XY]}_t}}}{{dt}} = {\beta _1}{{[AY]}_t} + {\beta _2}E_t^I{{[AX]}_t} - \left( {{\mu _1} + {\mu _2}} \right){{[XY]}_t}}&{(9)} \end{array}} \right. $$ 以AX和AA边为例,式(4)表示未断开的AX类型连边的演化方程。公式右边第一项表示未断开的AA边中一个A状态节点发生了内部故障;第二项表示未断开的AX边的A状态节点发生了内故障或者外部故障;第三项表示未断开的XX边中的一个X状态节点自发恢复;第四项表示未断开的YX边中Y状态节点自发恢复;第五项表示未断开的AX边中的X状态节点自发恢复;最后一项表示未断开的AX边中A状态节点断开了与X状态节点的连边。式(6)表示未断开的AA类型连边的演化方程。公式右边第一项表示未断开的AA边中的一个A状态节点发生了内部故障或者外部故障;第二项表示未断开的AX边和未断开的XA中的X状态节点自发恢复;第三项表示未断开的AY边和YA边中的Y状态节点自发恢复;第四项表示已断开的AX边和已断开的XA边中的X状态节点自发恢复后两个A状态节点重新连接;最后一项表示已断开的AY边和已断开的YA边中的Y状态节点自发恢复后两个A状态节点重新连接。其他未断开边的演化方程同理。已断开边的演化方程为:
$$ \left\{ {\begin{array}{*{20}{l}} \dfrac{{d\widetilde {{{[AX]}_t}}}}{{dt}} = - \left( {{\beta _1} + {\beta _2}E_t^A} \right)\widetilde {{{[AX]}_t}} - {\mu _1}\widetilde {{{[AX]}_t}} \\ \quad + {\mu _2}\widetilde {{{[YX]}_t}} + {\mu _1}\widetilde {{{[XX]}_t}} + \omega {[AX]_t} & {(10)} \\ \dfrac{{d\widetilde {{{[AY]}_t}}}}{{dt}} = - \left( {{\beta _1} + {\beta _2}E_t^A} \right)\widetilde {{{[AY]}_t}} - {\mu _2}\widetilde {{{[AY]}_t}} \\ \quad+ {\mu _1}\widetilde {{{[XY]}_t}} + {\mu _2}\widetilde {{{[YY]}_t}} + \omega {[AY]_t} & {(11)} \\ \dfrac{{d\widetilde {{{[XY]}_t}}}}{{dt}} = {\beta _2}E_t^A\widetilde {{{[AX]}_t}} + {\beta _1}\widetilde {{{[AY]}_t}} - {\mu _1}\widetilde {{{[XY]}_t}} \\ \quad- {\mu _2}\widetilde {{{[XY]}_t}}&{(12)} \\ {\dfrac{{d\widetilde {{{[YY]}_t}}}}{{dt}} = 2{\beta _2}E_t^A\widetilde {{{[AY]}_t}} - 2{\mu _2}\widetilde {{{[YY]}_t}}}&{(13)} \\ {\dfrac{{d\widetilde {{{[XX]}_t}}}}{{dt}} = 2{\beta _1}\widetilde {{{[AX]}_t}} - 2{\mu _1}\widetilde {{{[XX]}_t}}}&{(14)} \end{array}} \right. $$ 以已断开得AX边和XY边为例。式(10)表示已断开AX类型连边的演化方程。公式右边第一项表示已断开的AX边中的A状态节点发生了内部故障或者外部故障;第二项表示已断开AX边的X状态节点自发恢复后两个A状态节点连接;第三项表示已断开的XY边中的Y状态节点自发恢复;第四项表示已断开XX边中的一个X状态节点自发恢复;最后一项表示未断开的AX边中的A状态节点断开了与X状态节点的连边。式(12)表示已断开XY类型连边的演化方程。公式左边第一项表示已断开的AX边A状态节点发生了外部故障;第二项表示已断开AY边的A状态节点发生了内部故障;第三项表示断开XY边的X状态节点发生了自发恢复;最后一项表示断开的XY边的Y状态节点发生了自发恢复。其他已断开边的演化方程同理。通过迭代式(1)~式(14)就可以计算出三种节点的比例随着时间的变化和最终稳态值。
-
仅当A状态节点的故障邻居比例大于等于
$ f $ 时,才会发生外部故障。因此不能简单地将$ \boldsymbol{\beta}_{2} $ 视为A状态节点的外部故障概率。为计算A状态节点真实的外部故障概率,需要先计算A状态节点故障邻居比例大于等于$ f $ 的概率。因此,本小结将计算A状态节点故障邻居比例大于等于$ f $ 的概率,分别用$ {E_t} $ 、$ E_t^I $ 和$ E_t^A $ 来表示。$ {E_t} $ 、$ E_t^I $ 和$ E_t^A $ 分别表示A态节点的故障邻居比例大于$ f $ 的概率、至少连接一个I态节点的A态节点的故障邻居比例大于$ f $ 的概率和至少连接一个A态节点的A态节点故障邻居比例大于$ f $ 的概率。我们考虑了节点存在三类邻居:活跃邻居、未断边的故障邻居和已经断边的故障邻居。$ {E_t} $ 的计算式如下:$$ \begin{split} &{E_t} = \mathop \sum \limits_{{k_1} = 0}^k \mathop \sum \limits_{j = 0}^m C_k^{{k_1}}C_{k - {k_1}}^{k - {k_1} - j}{{\left( {\frac{{\widetilde {{{[AI]}_t}}}}{{{{[A]}_t}}}} \right)}^{{k_1}}}{{\left( {\frac{{{{[AI]}_t}}}{{{{[A]}_t}}}} \right)}^{k - {k_1} - j}}\\ &\qquad\qquad\quad {{\left( {1 - \frac{{{{[AI]}_t}}}{{{{[A]}_t}}} - \frac{{\widetilde {{{[AI]}_t}}}}{{{{[A]}_t}}}} \right)}^j} \end{split} $$ (15) 其中,
$ {k_1} $ 表示断开AI边的边数;$ j $ 表示A状态邻居数;$ m $ 表示健康邻居数上限,$ m = \left\lfloor (1 - f)* (k - {k_1}) \right\rfloor $ ,$ \left\lfloor \bigcirc \right\rfloor $ 为向下取整函数。$ {E_t} $ 中$ C_k^{{k_1}} $ 表示节点度为$ k $ 但断开了与$ {k_1} $ 个故障邻居的连边;$ C_{k - {k_1}}^{k - {k_1} - j} $ 表示剩余$ k - {k_1} $ 连边并有$ k - {k_1} - j $ 个故障邻居节点数;$C_k^{k_1} C_{k-k_1}^{k-k_1-j}\left(\dfrac{\widetilde{[A I]_t}}{[A]_t}\right)^{k_1}\left(\dfrac{[A I]_t}{[A]_t}\right)^{k-k_1-j}\left(1-\dfrac{[A I]_t}{[A]_t}-\dfrac{\widetilde{[A I]_t}}{[A]_t}\right)^j$ 表示节点度为$ k $ 断开了与$ {k_1} $ 个故障邻居的连边且有$ k - {k_1} - j $ 个故障邻居数的概率。$ E_t^I $ 和$ E_t^A $ 以相同的方式计算得出:$$ \left\{ {\begin{array}{*{20}{l}} E_t^I = \displaystyle\sum\limits_{{k_1} = 0}^k \displaystyle\sum\limits_{j = 0}^m C_{k - 1}^{{k_1}}C_{k - {k_1} - 1}^{k - {k_1} - 1 - j}{{\left( {\dfrac{{\widetilde {{{[AI]}_t}}}}{{{{[A]}_t}}}} \right)}^{{k_1}}}\\ \quad{{\left( {\dfrac{{{{[AI]}_t}}}{{{{[A]}_t}}}} \right)}^{k - 1 - {k_1} - j}}{{\left( {1 - \dfrac{{\widetilde {{{[AI]}_t}}}}{{{{[A]}_t}}} - \dfrac{{{{[AI]}_t}}}{{{{[A]}_t}}}} \right)}^j}&\qquad\qquad{(16)} \\ E_t^A = \displaystyle\sum\limits_{{k_1} = 0}^k \displaystyle\sum\limits_{j = 0}^{m - 1} C_{k - 1}^{{k_1}}C_{k - {k_1} - 1}^{k - {k_1} - 1 - j}{{\left( {\dfrac{{\widetilde {{{[AI]}_t}}}}{{{{[A]}_t}}}} \right)}^{{k_1}}}\\ \quad{{\left( {\dfrac{{{{[AI]}_t}}}{{{{[A]}_t}}}} \right)}^{k - 1 - {k_1} - j}}{{\left( {1 - \dfrac{{\widetilde {{{[AI]}_t}}}}{{{{[A]}_t}}} - \dfrac{{{{[AI]}_t}}}{{{{[A]}_t}}}} \right)}^j}&\qquad\qquad{(17)} \end{array}} \right. $$ -
本节探究自适应行为对故障-恢复传播模型的演化趋势和最终故障节点比例的影响。通过稳态时系统中是否超过一半的节点处于故障状态,判断系统最终故障状态是高故障状态还是低故障状态。实验在节点数
$ N = 1 \times {10^4} $ 和平均度$ \left\langle k \right\rangle = 10 $ 的ER(Erdős-Rényi)随机网络上进行。每个实验的仿真结果为50次仿真实验的均值。若无特殊说明, 恢复速率参数设置如下:$ {\mu _1} = 0.01 $ ,$ {\mu _2} = 0.1 $ 。 -
首先,对比了网络节点没有自适应行为(
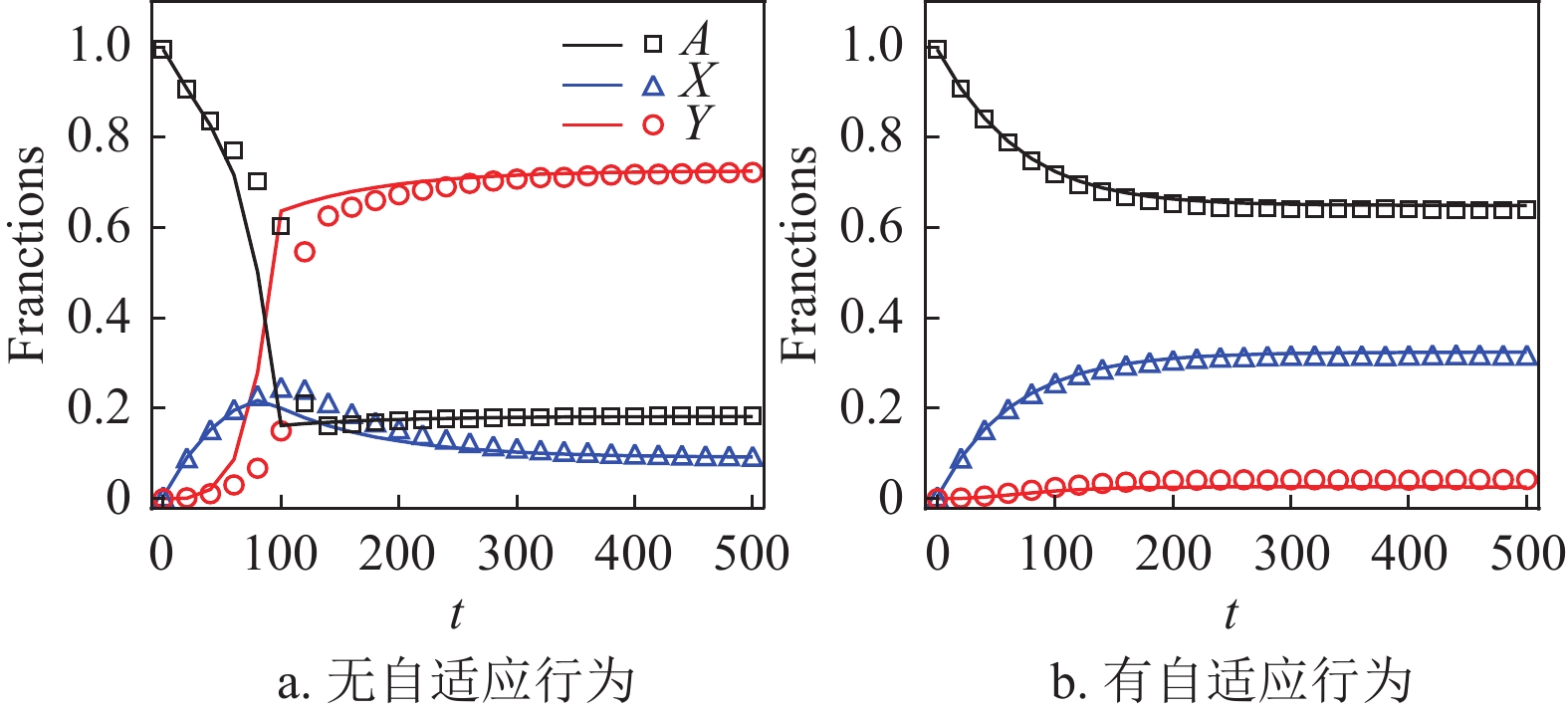
$ \omega=0 $ )和有自适应行为($ \omega=0.03 $ )时,活跃态节点(A)、内部故障状态节点(X)和外部故障状态节点(Y)比例随着时间的演化趋势,结果如图2所示。参数设置:(a)$ \beta_{1}=0.005 $ ,$ \boldsymbol{\beta}_{2}=0.4 $ ,$ \omega=0 $ ;(b)$ \beta_{1}=0.005 $ ,$ \boldsymbol{\beta}_{2}=0.4 $ ,$\omega = 0.03$ 。符号和实线分别代表了计算机仿真结果和理论结果,理论和仿真结果相吻合。
图 2 有、无自适应行为时三种节点比例随时间的演化图
当网络节点无自适应行为时,三种节点比例随着时间演化结果如图2(a)所示。节点比例随着时间的演化过程可以分为
$ t \in[0,50) $ 、$ t \in[50,130) $ 和$ t \in[130,500] $ 三个阶段。在早期阶段,即$ t \in[0,50) $ ,A状态节点的比例下降,X状态节点的比例增加,Y状态节点的比例保持接近零。在这一阶段,大部分A状态节点的故障邻居数的比例都小于$ f $ ,所以很少的A状态节点发生外部故障。在$ t \in[50,130) $ 时,A状态节点的比例呈迅速下降趋势,X状态节点的比例则是先增加后减少,Y状态节点的比例呈现出快速增加0.6以上。在这一阶段,X状态节点比例的增加,故障邻居比例大于$ f $ 的A状态节点比例不断上升,Y状态节点的比例在快速增加。随着故障邻居比例大于$ f $ 的A状态节点发生外部故障成为Y状态节点,可以转变为X状态节点的A状态节点数量逐渐减少,因此X状态节点的比例呈先增加后减少的趋势。在后期阶段,$ t \in[130,500] $ 时,A状态节点的比例缓慢降低并稳定在0.19,X状态节点的比例降低并稳定在0.09,Y状态节点的比例缓慢增加并稳定在0.72。在此阶段,X和Y状态节点以各自的恢复速率恢复,但A状态节点周围存在大量故障节点,因此A状态节点主要由外部原因再次出现故障。最终整个系统呈现出高故障状态。当存在自适应行为时,三种节点比例随着时间演化过程如图2(b)所示。节点比例随着时间的演化过程可以分为$ t \in[0,50) $ 和$ t \in(50,500] $ 两个阶段。在早期阶段,即$ t \in[0,50) $ ,三种节点比例随着时间的演化过程和网络节点无自适应行为的情况相似。这是因为此时主要为自发的内部故障,而自适应行为不会影响内部故障的发生。而在$ t \in(50,500] $ 时,A状态节点的比例经过缓慢变化,逐渐降低并稳定在0.64,而X状态节点的比例经过缓慢增加,稳定在0.32,Y状态节点的比例缓慢增加并稳定在0.04。这说明A状态节点的自适应行为使邻居节点的故障比例降低而不能达到外部故障的条件,从而避免了外部故障的发生。因为发生外部故障的情况减少,剩余的或重新恢复的A态节点主要发生内部故障。相比没有自适应行为的情况,有自适应行为的X状态节点比例的稳定值更大,但整体故障节点的比例更少。总之,自适应行为避免了系统最终演化为高故障状态。 -
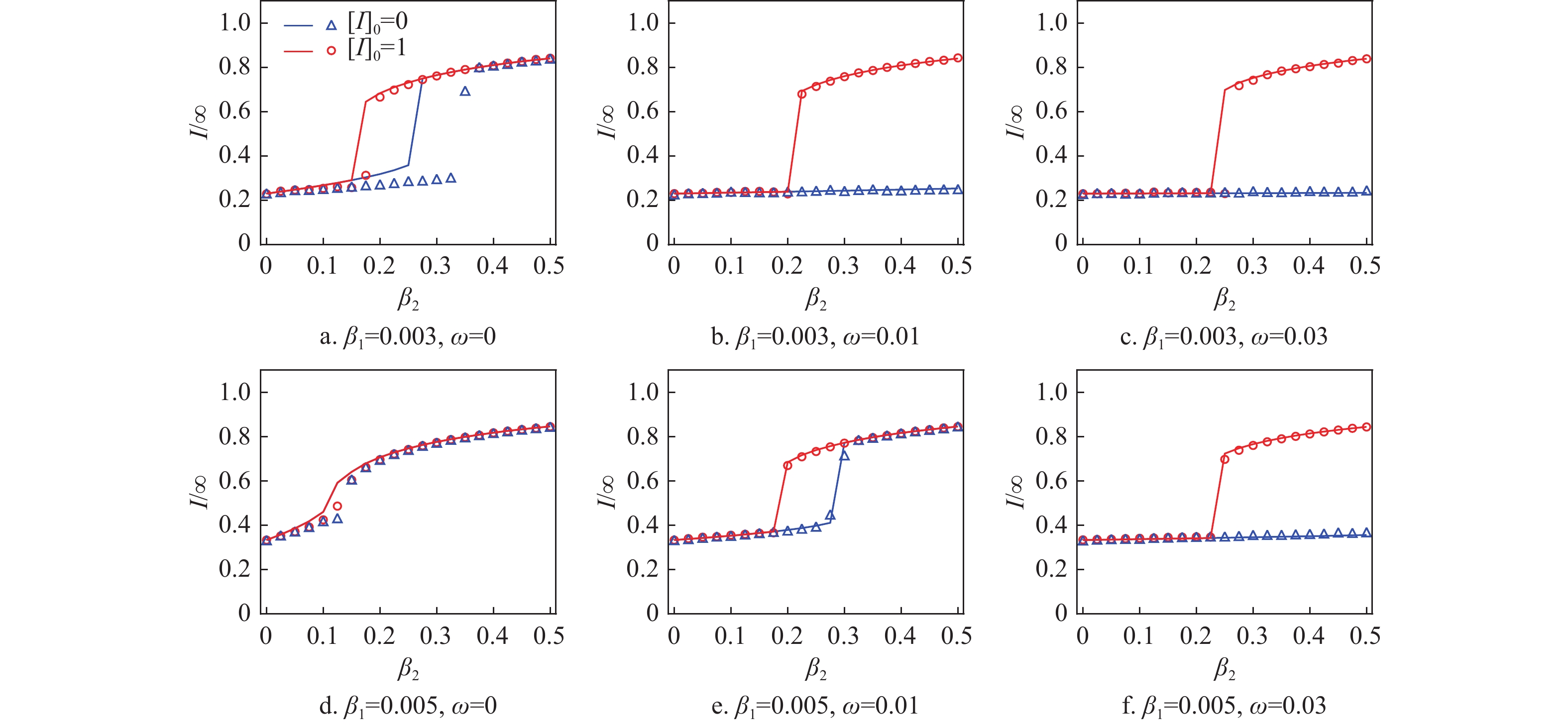
由3.1节我们发现由于A状态节点的自适应行为会影响其邻居数和故障节点邻居比例,从而避免向Y状态节点的转变。因此,本节研究了不同断边速率下,外部故障速率对系统最终故障节点(I)的比例的影响,如图3所示。最终故障节点比例为稳态时X状态和Y状态节点的占比之和。
$ [I]_{0}=0 $ 表示系统的初始故障节点比例为0,$ [I]_{0}=1 $ 表示系统初始故障节点比例为1。符号和实线分别代表了计算机仿真和理论计算结果,理论和仿真结果相吻合。图3a、图3b和图3c为
$ \beta_{1}=0.003 $ 时最终故障节点比例随$ \beta_{2} $ 的变化图。断边速率为:(a)$\omega = 0$ ;(b)$ \omega=0.01 $ ;(c)$\omega = 0.{\text{03}}$ 。当没有自适应行为时(即$ \omega=0 $ ),如图3a所示,无论网络初始故障节点比例是1还是0,I状态节点的比例随着$ \beta_{2} $ 的变化都存在一个明显的突变点。初始的I状态节点比例为1时,对应的突变点的$ \beta_{2} $ 值较小;而初始的I状态节点比例为0时,对应的突变点的$ \beta_{2} $ 值较大。这是因为网络中初始故障节点比例为1时,使得A状态节点更容易达到外部故障条件而变成Y状态节点。初始故障节点比例为0时,A状态节点更难达到外部故障条件,需要更大的$ \beta_{2} $ 值才能积累大量的故障节点使A状态节点的故障邻居比例大于$ f $ 。当网络节点具有自适应行为时,如图3b和图3c所示,初始故障节点的比例为0时突变现象消失。初始故障节点比例为1时仍然存在突变现象。因为初始故障节点比例为0时,A状态节点的故障邻居数量不多,只需要断开少量与故障邻居的连边就可以降低故障邻居的比例,避免发生外部故障。这导致了突变现象的消失。而初始故障节点比例为1时,突变现象仍然存在,但突变点对应的$ \beta_{2} $ 的值增加了。突变现象的存在的原因是初始就有大量的故障节点存在,A状态节点需要断开更多与故障邻居的连边才能够降低故障邻居的比例,避免发生外部故障。这使得自适应行为的效果降低。而突变点对应的$ \beta_{2} $ 的值增加,是由于自适应行为效果虽然降低,但仍然能避免一些外部故障的发生。图3d、图3e和图3f为
$ {\beta _1} = 0.005 $ 时最终故障节点比例随着$ \beta_{2} $ 的变化图。断边速率为:(d)$\omega = 0$ ;(e)$ \omega=0.01 $ ;(f)$\omega = 0.{\text{03}}$ 。如图3(d)所示,当$ \omega=0 $ 时,即网络节点没有自适应行为时,无论初始故障节点比例为0还是1,最终故障节点比例随着$ \beta_{2} $ 的变化趋势一致,磁滞现象消失。这是由于$ {\beta _1} $ 足够大,无论初始故障节点比例为何值都能产生足够的X状态节点使得A状态节点达到外部故障条件。当$ \omega = 0.01 $ 时,如图3e所示,有一定的自适应行为时,初始故障节点比例为0和1都又出现了突变点,磁滞现象重新出现。初始的I状态节点比例为1时,对应的突变点的$ \beta_{2} $ 值较小;而初始的I状态节点比例为0时,对应的突变点的$ \beta_{2} $ 值较大。同样,当初始的I状态节点比例为1时,由于初始就存在大量的故障节点,A态节点更容易达到外部故障条件,较小的$ \beta_{2} $ 值就能使的系统发生大规模故障。而初始故障节点比例为0时,相较于图3b出现了突变点,这是由于$ {\beta _1} $ 相对较大,能够产生更多的X状态节点。当$ \beta_{2} $ 足够大时,就能引发A状态节点发生外部故障成Y状态节点。图3f($\omega = 0.{\text{03}}$ )出现的现象与图3c和图3d相同,也是由于断边概率过大所导致的。图3中理论计算和计算机仿真得到的最终故障节点比例随
$ \beta_{2} $ 变化趋势一致,这验证了理论框架的有效性。$ {\beta _2} \in [0, 0.5] $ 时,通过对比图3a、图3b和图3c中最终故障节点比例随$ \beta_{2} $ 变化趋势,发现随着自适应断边速率的增加,磁滞现象消失;通过对比图3d、图3e和图3f中最终故障节点比例随$ \beta_{2} $ 变化趋势,发现自适应行为能使磁滞现象出现。当断边速率继续增加时,磁滞现象再次消失。
图 3 最终故障节点比例随着
$ \boldsymbol{\beta}_{2} $ 的变化图 -
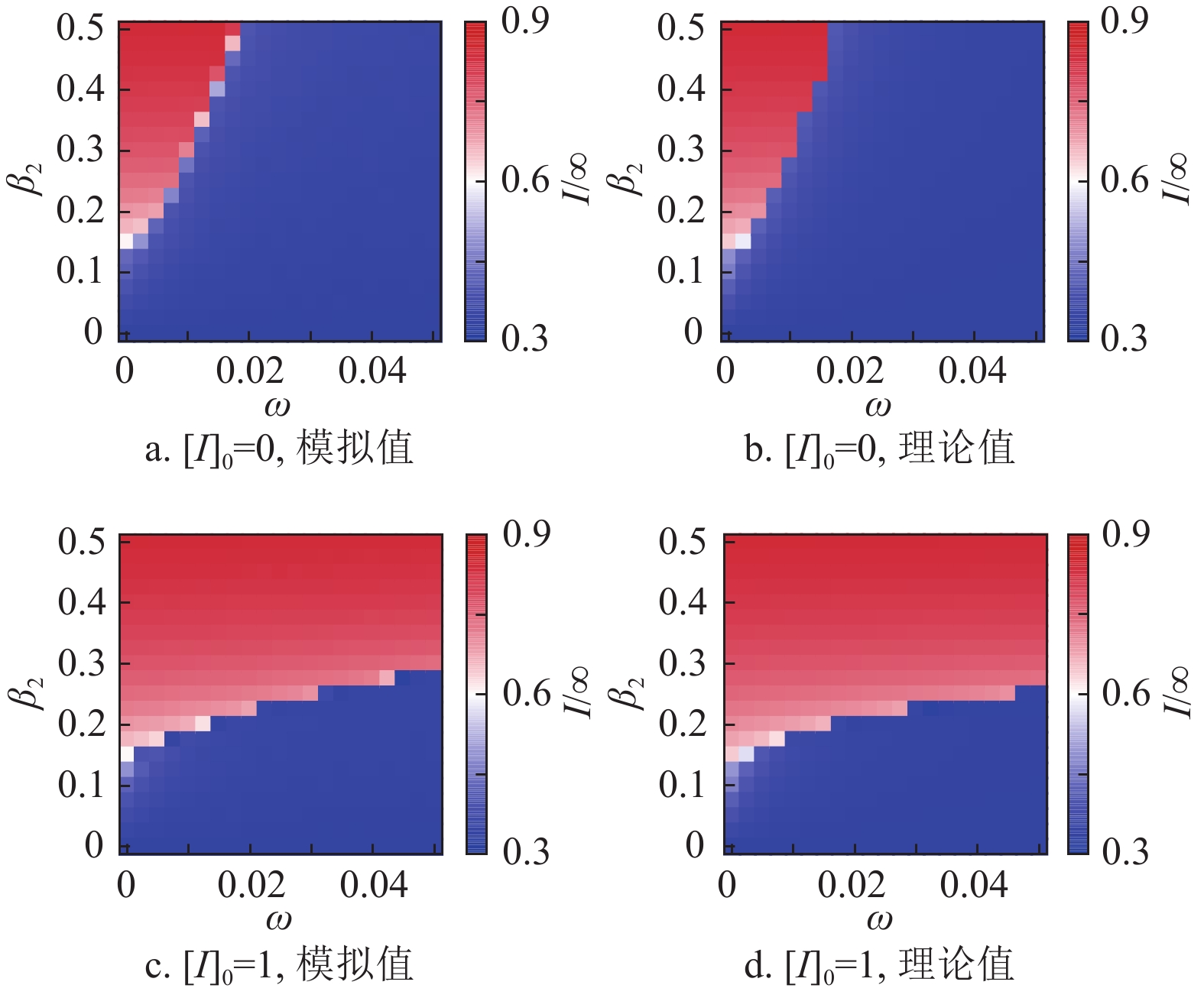
本节进一步研究外部故障速率和断边速率联合对系统最终故障节点比例的影响。我们以外部故障速率
$ \beta_{2} $ 和断边速率$ \omega $ 为变量,分别绘制了初始状态为低故障和高故障时的最终故障节点比例的相图,如图4所示。内部故障速率$ \beta_{1}=0.005 $ 。图4a和图4b分别显示了初始故障节点比例为0时计算机仿真和理论计算的结果。当
$ \beta_{2} \in [0,0.125] $ 时,最终故障节点比例随$ \omega $ 的增加而降低。在任意$ \omega $ 的取值下系统稳态都呈现低故障状态。因为外部故障率$ \beta_{2} $ 较低,使Y状态节点数量难以快速增加而引发系统大规模的故障。当$ \beta_{2} \in[0.125,0.5] $ 时,最终故障节点比例随$ \omega $ 的增加而降低且存在一个$ \omega $ 值使系统从高故障转变到低故障状态。计算机仿真结果(理论结果)表明当$ \omega $ 大于0.02(0.0175)时,$ \beta_{2} $ 在$ [0,0.5] $ 取值范围内系统始终为低故障状态。这说明如果系统初始故障节点比例低时,只需要较小的断边速率,就能避免大规模故障的发生。图4c和图4d分别显示了初始故障节点比例为1时,计算机仿真和理论计算的结果。当
$ \beta_{2} \in [0,0.125] $ 时,最终故障节点比例随$ \omega $ 的增加而降低。在任意$ \omega $ 的取值下,系统稳态都呈现低故障状态,这与图4(a)和(b)的初始故障节点比例为0时的结果相同。当$ \beta_{2} \in(0.125,0.275] $ 时,最终故障节点比例随$ \omega $ 的增加而降低且存在一个$ \omega $ 值使系统从高故障转变到低故障状态,但该$ \omega $ 值远大于图4a和图4b中的结果。而当$ \beta_{2} \in(0.275,0.5] $ 时,最终故障规模随$ \omega $ 的增加而降低,在任意$ \omega $ 的取值下系统稳态都呈现高故障状态。图4c和图4d的结果表明如果系统初始故障节点比例高时,在较大的$ \beta_{2} $ 下,自适应行为将无法避免大规模故障的发生。这是因为初始的故障节点比例较高,使A状态节点更容易满足外部故障条件。A状态节点的自适应行为更难降低故障邻居的比例到阈值$ f $ 下,所以系统仍呈现高故障状态。
图 4 最终故障节点比例受
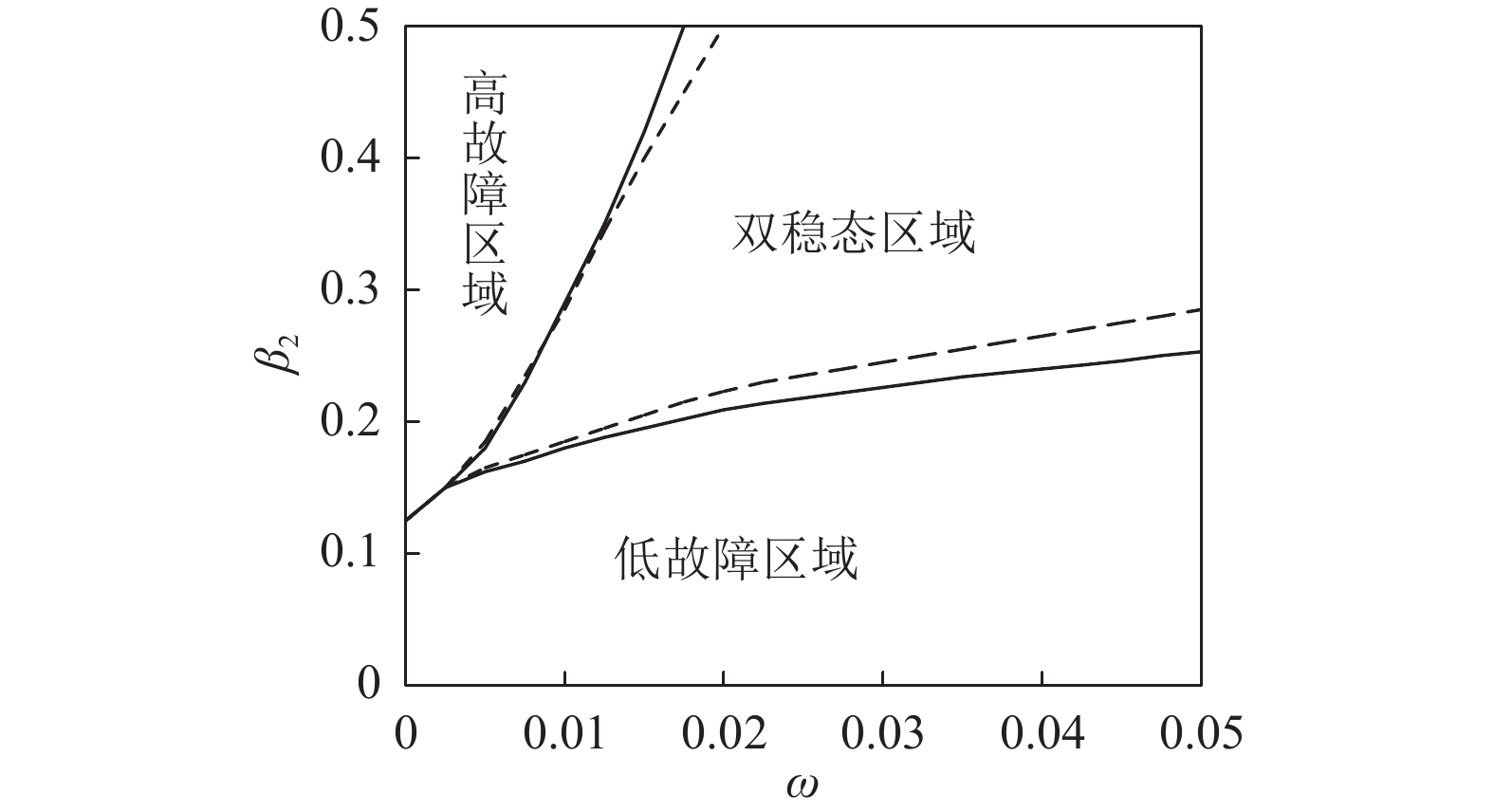
$ \beta_{2}-\omega $ 影响的相图根据图4中初始故障节点比例分别为0和1时的结果,我们得到了三个相变区域,如图5所示。实线是理论计算结果,虚线是计算机仿真结果。在低故障区域,不管系统初始故障节点比例是0和1,系统都将呈现为低故障状态。在高故障区域,同样与系统初始状态无关,系统都将呈现为高故障状态。对于双稳态区域,系统处于低故障状态还是高故障状态取决于系统的初始故障节点比例。

图 5
$ \beta_{2}-\omega $ 相图中的稳态区域划分 -
本文提出自适应网络上的故障-恢复传播动力学模型。在该模型中,节点在发生内部和外部故障后能够以不同的恢复概率自发恢复;为避免外部故障的发生,活跃节点会断开与故障邻居的连边以降低故障邻居的比例,直到故障邻居节点恢复后才重新连接。基于点对近似方法,推导了自适应网络上的故障-恢复传播模型的传播动力学方程。通过研究自适应行为对故障-恢复传播动力学的影响,主要发现如下。
1)自适应行为能够降低系统稳态时的故障节点比例。活跃节点会断开与故障邻居的连边而降低故障邻居的比例,使其不容易达到外部故障的阈值条件,从而降低整个系统的最终故障节点比例。
2)自适应行为增大系统从低故障向高故障状态转变的突变点。当初始故障节点比例为1时,随着断边速率的增加,突变点对应的
$ \beta_{2} $ 值会增加。这是因为初始故障节点比例较大,活跃节点更易到达外部故障条件而发生外部故障。而当初始故障节点比例为0时,随着断边速率的增加,突变现象会消失。这是因为初始故障节点比例低,活跃节点受自适应行为影响不容易到达外部故障条件而避免发生外部故障。3)自适应网络上的故障传播动力学存在相变和磁滞现象,并且出现了三种稳态区域:低故障区域、高故障区域和双稳态区域。
本文将故障-恢复传播模型拓展到动态网络,建立了自适应网络上的故障-恢复传播模型,进一步研究了动态网络上故障-恢复传播机制及自适应行为对故障-恢复传播动力学的影响。本研究为设计和优化自适应网络提供了定量分析,将帮助我们建立更加鲁棒的网络系统。但还有很多问题有待更加深入的讨论。
1)在文章中,活跃节点会以一定速率断开与故障节点的连边。活跃节点的断边行为可以进一步探讨。可以考虑设置一个断边阈值,即只有当邻居失效节点的比例超过该阈值时才进行断边操作。当断边阈值大于外部故障阈值f时,节点可能在发生断边之前就已经发生了外部故障。相反,如果将断边阈值设定为小于外部故障阈值f,节点就有可能在发生外部故障之前进行断边操作,降低节点发生外部故障的概率。而文章中的提及的断边方式可以被视为断边阈值为0的特殊情况。
2)结果讨论中,固定了
${\mu _1}$ 和${\mu _2}$ ,并设置${\mu _1}$ 远小于${\mu _2}$ 的值。这考虑到节点发生内部故障后,需要更多的时间恢复成正常状态。在后续工作中,可以调整${\mu _1}$ 和${\mu _2}$ ,研究X和Y状态节点在网络中的变化情况。3)在实验中,只讨论了初始故障节点比例为0和1时系统的演化。这是为了确定双稳态区域的界限。在双稳态区域内,初始故障节点比例为0时,系统将演化成低故障状态;初始故障节点比例为1时,系统将演化成高故障状态。初始故障节点比例在双稳态区域内对系统的最终状态有影响。在后续的研究工作中,可以进一步探讨在双稳态区域内,不同的初始故障节点比例对系统的影响。
The failure-recovery propagation dynamics with adaptive behavior in complex networks
-
摘要: 在故障-恢复动力学中,节点受内部或外部因素而故障失效后能够有概率自发恢复。考虑到未故障的节点存在避免故障的自适应行为,建立自适应网络上的故障-恢复模型。在该模型中,活跃节点为了改善自身局域环境以降低外部故障概率,将主动断开与故障邻居的连边,直到故障邻居恢复正常工作后再重新建立连接。基于点对近似思想建立了理论框架,用于预测故障率的时间演化趋势和系统的最终故障规模。大量的计算机仿真结果验证了理论预测的准确性,并发现系统具有相变和磁滞现象。在不同的自适应断边速率和外部故障速率下,自适应行为能使系统的磁滞区域产生或消失,系统将出现受初始故障规模影响的双稳态区域。
-
关键词:
- 故障-恢复传播动力学 /
- 自适应行为 /
- 点对近似 /
- 相变
Abstract: In the failure-recovery dynamics, nodes can recover spontaneously with probability after failure due to internal or external factors. Considering the ability of individual components to actively change their connectivity, we establish a failure-recovery propagation model on adaptive networks. In this model, active nodes disconnect from their failed neighbors to improve the local environment and thus reduce the probability of external failure. A theoretical framework based on pairwise approximation is established to predict the time evolution of the failure rate and the final failure size of the system. Numerous computer simulations validate the accuracy of the theoretical predictions and reveal the system’s rich phase transitions and hysteresis phenomena. Adaptive behavior can cause the hysteresis region of the system to appear or disappear under different adaptive edge-cutting rates and external failure rates, and the system exhibits a bistable region that is influenced by the initial failure size. -
[1] DE DOMENICO M, GRANELL C, PORTER M A, et al. The physics of spreading processes in multilayer networks[J]. Nature Physics, 2016, 12: 901-906. doi: 10.1038/nphys3865 [2] SHEKHTMAN L M, DANZIGER M M, HAVLIN S. Recent advances on failure and recovery in networks of networks[J]. Chaos, Solitons & Fractals, 2016, 90: 28-36. [3] GARAS A, ARGYRAKIS P, ROZENBLAT C, et al. Worldwide spreading of economic crisis[J]. New Journal of Physics, 2010, 12(11): 113043. doi: 10.1088/1367-2630/12/11/113043 [4] PARSHANI R, BULDYREV S V, HAVLIN S. Critical effect of dependency groups on the function of networks[J]. Proceedings of the National Academy of Sciences of the United States of America, 2011, 108(3): 1007-1010. [5] BIALEK J W. Why has it happened again? Comparison between the UCTE blackout in 2006 and the blackouts of 2003[C]//Proceedings of the IEEE Lausanne Power Tech. New York: IEEE, 2007: 51-56. [6] LI D Q, FU B W, WANG Y P, et al. Percolation transition in dynamical traffic network with evolving critical bottlenecks[J]. Proceedings of the National Academy of Sciences of the United States of America, 2015, 112(3): 669-672. [7] MOTTER A E, LAI Y C. Cascade-based attacks on complex networks[J]. Physical Review E, 2002, 66(6): 065102. doi: 10.1103/PhysRevE.66.065102 [8] 贾春晓, 李明, 刘润然. 多层复杂网络上的渗流与级联失效动力学[J]. 电子科技大学学报, 2022, 51(1): 148-160. doi: 10.12178/1001-0548.2021184 JIA C X, LI M, LIU R R. Percolation and cascading dynamics on multilayer complex networks[J]. Journal of University of Electronic Science and Technology of China, 2022, 51(1): 148-160. doi: 10.12178/1001-0548.2021184 [9] 谢怡燃, 李国华, 杨波. 基于站点线路数的城市公交网络鲁棒性研究[J]. 电子科技大学学报, 2022, 51(4): 630-640. doi: 10.12178/1001-0548.2021336 XIE Y R, LI G H, YANG B. Study on the robustness of urban bus network based on the number of lines at a station[J]. Journal of University of Electronic Science and Technology of China, 2022, 51(4): 630-640. doi: 10.12178/1001-0548.2021336 [10] 李钊, 郭燕慧, 徐国爱, 等. 复杂网络中带有应急恢复机理的级联动力学分析[J]. 物理学报, 2014, 63(15): 158901. doi: 10.7498/aps.63.158901 LI Z, GUO Y H, XU G A, et al. Analysis of cascading dynamics in complex networks with an emergency recovery mechanism[J]. Acta Physica Sinica, 2014, 63(15): 158901. doi: 10.7498/aps.63.158901 [11] 马秀娟, 赵海兴, 胡枫. 基于超图的超网络相继故障分析[J]. 物理学报, 2016, 65(8): 374-383. doi: 10.7498/aps.65.088901 MA X J, ZHAO H X, HU F. Cascading failure analysis in hyper-network based on the hypergraph[J]. Acta Physica Sinica, 2016, 65(8): 374-383. doi: 10.7498/aps.65.088901 [12] DI MURO M A, LA ROCCA C E, STANLEY H E, et al. Recovery of interdependent networks[J]. Scientific Reports, 2016, 6: 22834. doi: 10.1038/srep22834 [13] HONG S, LV C, ZHAO T D, et al. Cascading failure analysis and restoration strategy in an interdependent network[J]. Journal of Physics A:Mathematical and Theoretical, 2016, 49(19): 195101. doi: 10.1088/1751-8113/49/19/195101 [14] SHANG Y L. Localized recovery of complex networks against failure[J]. Scientific Reports, 2016, 6: 30521. doi: 10.1038/srep30521 [15] TELLER S, ESTÉVEZ-PRIEGO E, GRANELL C, et al. Spontaneous functional recovery after focal damage in neuronal cultures[J]. eNeuro, 2020, 7(1): ENEURO. 0254-ENEURO. 0219.2019. [16] MAJDANDZIC A, PODOBNIK B, BULDYREV S V, et al. Spontaneous recovery in dynamical networks[J]. Nature Physics, 2014, 10: 34-38. doi: 10.1038/nphys2819 [17] BÖTTCHER L, NAGLER J, HERRMANN H J. Critical behaviors in contagion dynamics[J]. Physical Review Letters, 2017, 118(8): 088301. doi: 10.1103/PhysRevLett.118.088301 [18] BÖTTCHER L, LUKOVIĆ M, NAGLER J, et al. Failure and recovery in dynamical networks[J]. Scientific Reports, 2017, 7: 41729. doi: 10.1038/srep41729 [19] LIN Z H, FENG M, TANG M, et al. Non-Markovian recovery makes complex networks more resilient against large-scale failures[J]. Nature Communications, 2020, 11: 2490. doi: 10.1038/s41467-020-15860-2 [20] WANG W, LIU Q H, LIANG J H, et al. Coevolution spreading in complex networks[J]. Physics Reports, 2019, 820: 1-51. doi: 10.1016/j.physrep.2019.07.001 [21] FUNK S, SALATHÉ M, JANSEN V A A. Modelling the influence of human behaviour on the spread of infectious diseases: a review[J]. Journal of the Royal Society, Interface, 2010, 7(50): 1247-1256. doi: 10.1098/rsif.2010.0142 [22] GROSS T, DOMMAR D’LIMA C J, BLASIUS B. Epidemic dynamics on an adaptive network[J]. Physical Review Letters, 2006, 96(20): 208701. doi: 10.1103/PhysRevLett.96.208701 [23] SCANLON H, GEMMER J. Epidemic conditions with temporary link deactivation on a network SIR disease model[EB/OL]. [2022-03-01]. http://arxiv.org/abs/2107.10940. [24] SHAW L B, SCHWARTZ I B. Enhanced vaccine control of epidemics in adaptive networks[J]. Physical Review E, 2010, 81(4): 046120. doi: 10.1103/PhysRevE.81.046120 [25] YANG H, TANG M, ZHANG H F. Efficient community-based control strategies in adaptive networks[J]. New Journal of Physics, 2012, 14(12): 123017. doi: 10.1088/1367-2630/14/12/123017 [26] LIU C, ZHANG Z K. Information spreading on dynamic social networks[J]. Communications in Nonlinear Science and Numerical Simulation, 2014, 19(4): 896-904. doi: 10.1016/j.cnsns.2013.08.028 [27] LIU C, ZHOU N, ZHAN X X, et al. Markov-based solution for information diffusion on adaptive social networks[J]. Applied Mathematics and Computation, 2020, 380: 125286. doi: 10.1016/j.amc.2020.125286 [28] PENG X L, ZHANG Y D. Contagion dynamics on adaptive multiplex networks with awareness-dependent rewiring[J]. Chinese Physics B, 2021, 30(5): 058901. doi: 10.1088/1674-1056/abe1ab -

 点击查看大图
点击查看大图
图(5)
计量
- 文章访问数: 165
- HTML全文浏览量: 70
- PDF下载量: 0
- 被引次数: 0
































































































































































