 ISSN
ISSN 






































-
目前全球煤矿开采正由传统机械化开采向智能化开采过渡,文献[1]提出智能化煤矿系统架构,认为矿井目标检测是煤矿智能化高速通信及信息获取的基础,且应以人员检测为主。由于矿井使用人工光源照明且井下煤尘干扰严重,导致监控图像存在光照不均、细节模糊等问题[2]。工作人员无法长时间有效对视频进行多场景监控,井下作业人员的实际位置、工作情况等无法及时反馈到控制室,因此井下作业存在很大的危险性。
当前目标检测算法分为传统目标检测与深度神经网络[3]两大类,传统目标检测需要手工设计特征,使用滑动窗口的方式搜索图像,最终采用分类器进行分类。此类算法存在手工设计特征鲁棒性差,存在窗口冗余等问题,导致传统检测方法逐渐被深度神经网络所取代[4]。文献[5]使用YOLOv4针对矿井红外图像进行人员检测,通过迁移训练提升模型的泛化性,但需使用超分辨率卷积网络对红外图像进行预处理,导致模型整体参数增加,使得井下设备无法提供足够的计算量。文献[6]提出一种基于Retinex理论和小波多尺度的边缘检测算法,从低照度矿井图像中获取边缘图像,向矿用巡检机器人提供环境信息,该算法具有良好的实时性,但易受外界环境干扰,鲁棒性较差。文献[7]使用YOLOv5对矿井目标进行检测,采用轻量化主干网络加速模型的推理速度,使模型保持一定精度的同时达到实时检测标准,但是对于遮挡目标检测效果不佳。文献[8]使用YOLOv5和Deepsort算法实现井下人员检测及跟踪,引入跟踪模型增强了模型的抗遮挡能力,并且部署于嵌入式平台实现了矿井人员计数。但是该模型ID转换仍然存在,需要进一步的改进。上述方法专注于改进特征提取网络,适应井下图像特点,得到高精度的图像;或者为了满足参数轻量化,保证实时性,使用轻量化主干网络进行替换,使得模型存在一定的问题,无法保证模型检测精度与速率之间的均衡[9]。
针对上述问题,本文基于YOLOv7[10],提出一种可用于矿井人员实时检测的模型,首先采用ShuffleNetV2[11]作为模型的主干网络,加强CPU端的推理速度,同时在shuffle_block模块中引入Swin Transformer[12]注意力机制,增强感受野,提升模型的全局感知能力,优化模型在遮挡情况下的检测效果;其次在颈部多尺度融合网络添加ACmix[13]模块,通过模块内部的卷积通道和自注意力通道捕捉更多的特征,提升模型对小目标的敏感度[14];最后引入Efficient IOU Loss[15]加速算法训练过程的收敛速度。
-
YOLO[16-20]作为目标检测单阶段经典模型,由于其优异的运行速度和良好的精度被广泛应用于系统实时检测,并能够支持GPU设备以及边缘设备到云端的部署。而YOLOv7在MSCOCO和ImageNet数据集上检测显示,其准确率及速度均远超其余YOLO系列模型。相较于其前身YOLOv5,YOLOv7通过改进主干网络和特征融合的方式,进一步提升了检测精度;使用自适应卷积和SPP-PANet多尺度融合进行优化,使得模型保持较高精度的同时实现更快的检测速度;同时其架构相对简单,易于拓展和修改,还具有许多实用的工具和接口,使得用户能够快速进行模型训练和应用部署。因此本文选择YOLOv7作为矿井人员检测模型。
YOLOv7主要包含了Input、Backbone、Neck、Head四部分。图像首先经过Input进行数据增强等预处理操作;然后送入Backbone进行特征提取;随后将所提取特征送到Neck进行融合得到三种不同尺度的特征,使得模型不仅能够在大规模、多类别的数据集上取得较好的表现,同时还能够在小样本、小类别的数据集上进行有效的训练和检测;最终在Head输出检测结果。其特有的高效聚合网络ELAN,通过扩张、变换及融合基数的方式提升模型的学习能力,同时控制梯度路径加速模型的收敛;其设计的Rep重参数化卷积通过梯度流传播路径将重参数化的卷积和模型相结合,实现模型训练过程中速度与精度的均衡[21]。
-
YOLOv7使用ELAN模块进行特征提取时,采用四个特征进行通道的拼接,但由于每个通道都包含着不同特征信息,这种直接拼接的方式易使各个卷积提取到的特征形成通道隔离,导致模型对于复杂场景检测效果较差。
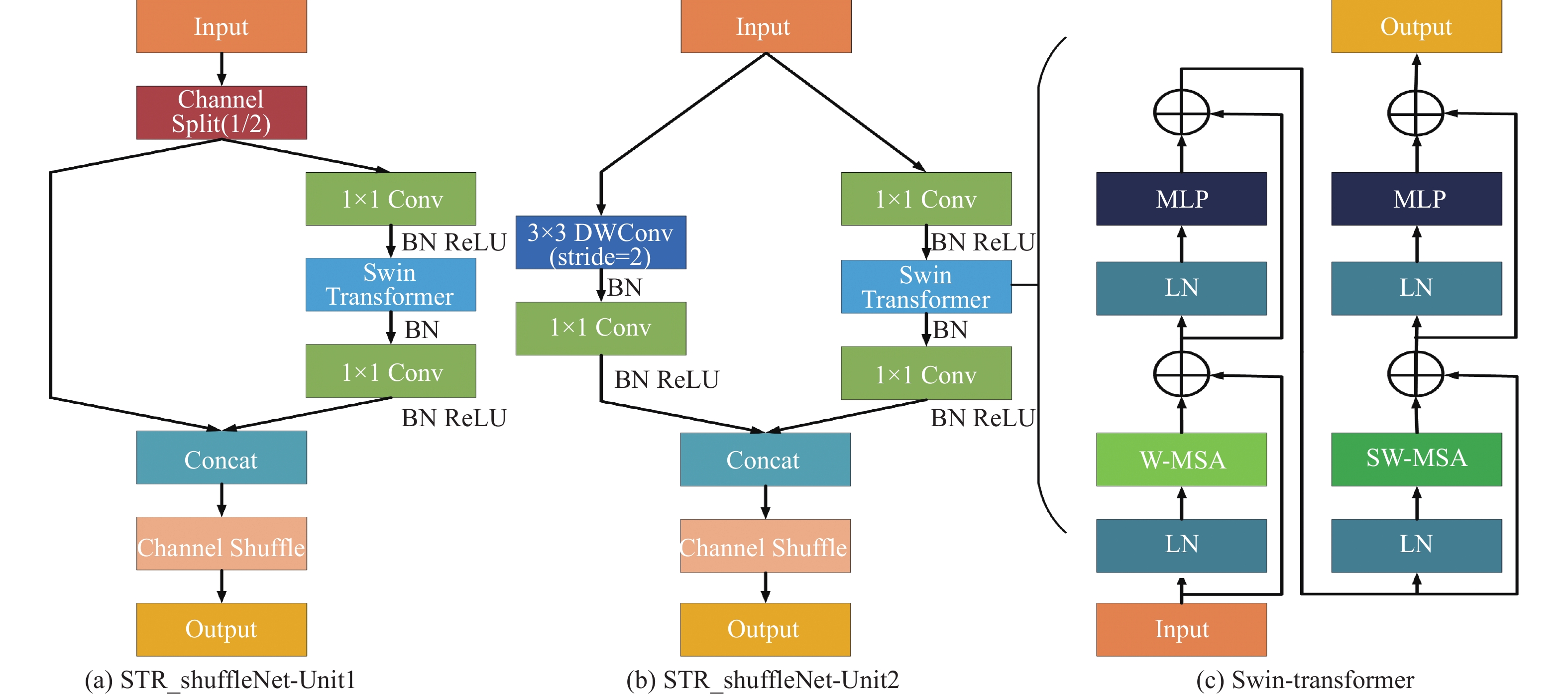
为了解决这一问题,本文引入高性能轻量化网络ShuffleNetV2,其设计有两种模块:ShuffleNet-Unit1和ShuffleNet-Unit2,如图1所示。其核心操作是Group convolution和Channel shuffle,利用分组卷积来扩展特征块的计算基数,使得特征信息被有效表达;同时减少参数量,降低网络过拟合的风险。但是分组卷积会限制网络特征信息的交流范围,影响网络的特征提取能力。因此在分组卷积后连接通道混洗操作,将不同组间的特征信息重新分组,促进通道间的信息流动,提升组间特征信息学习能力[22]。通道重组结构可以关注更多局部区域相关特征点所包含的信息,所以重组后的特征图相较原始特征图包含更多的语义信息。同时本文将原结构最大池化层采用深度可分离卷积进行替换,实现了通道与区域的分离,增强特征提取能力的同时降低参数量[23];使用全局池化层替换原结构中的全连接层进行特征融合,保留前面卷积层提取的空间信息,提升网络的泛化能力。表1展示了改进ShuffleNetV2结构。
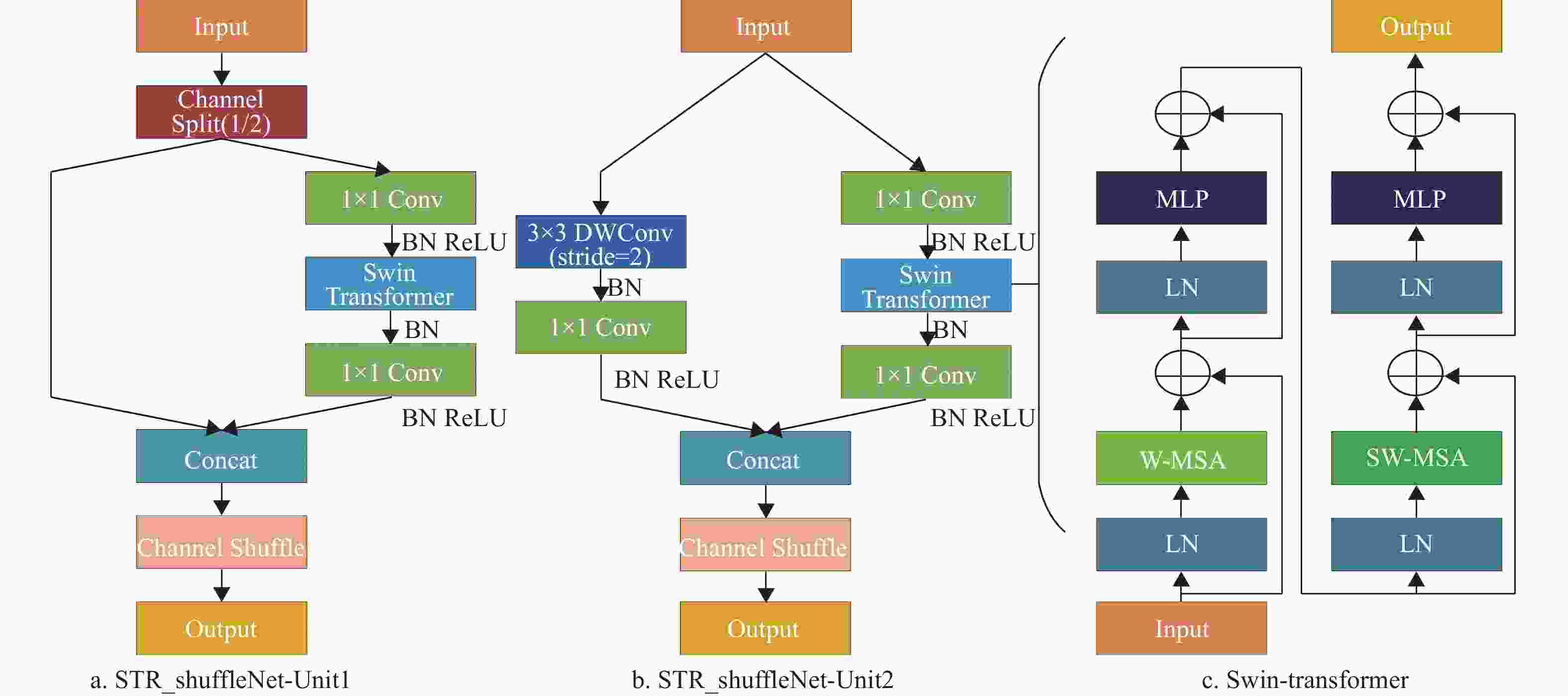
图 1 STR_shuffleNet基本单元
表 1 改进ShuffleNetV2结构
层数 输出大小 核大小 步长 重复 通道数 Image 224$ \times $224 3 Conv1 112$ \times $112 3$ \times $3 2 1 24 DW conv 56$ \times $56 3$ \times $3 2 1 24 Stage2 28$ \times $28 2 1 116 Stage2 28$ \times $28 1 3 116 Stage3 14$ \times $14 2 1 232 Stage3 14$ \times $14 1 7 232 Stage4 7$ \times $7 2 1 464 Stage4 7$ \times $7 1 3 464 Conv5 7$ \times $7 1$ \times $1 1 1 1024 Global pooling 1$ \times $1 7$ \times $7 当目标出现部分遮挡时,易发生漏检现象,主要原因在于现有结构仅具有局部信息的感知能力,而对于全局信息的感知较差,对于被遮挡目标无法进行有效检测。由于CNN具有良好的局部感受野,而Transformer[24]具有优异的全局感受野,考虑传统Transformer结构参数量庞大,而Swin-Transformer采用小窗口将特征序列分为几部分,并在小窗口内计算自注意力机制,让计算复杂度随着输入图像的大小呈线性增长,大幅降低计算复杂度。故本文引入Swin-Transformer进行特征提取,尽管Swin-Transformer很高效,但其不擅长建立远程跨窗口来扩大感受野,因此将其引入shuffle_block,在基于窗口的自注意力模块中引入空间Shuffle操作,以提供窗口之间的连接并增强系统的建模能力。
STR_shuffleNet利用shuffle_block特有结构,左侧支路保留局部特征感知,右侧支路采取全局信息度量,通过特征细化来增强被遮挡目标的检测效果,同时引入自注意力机制,建立针对目标位置信息的关注,在通道间建立特征映射关系,使得网络充分利用这些通道信息赋予目标通道更高的权重,有效确定目标的存在;在特征图层面,对特征图区域进行关注,捕获成对的像素级关系,更好的定位目标位置。最后采用通道交换的方式,使得特征通道具有更强的鲁棒交互性[25]。基于此构建的分组卷积及特征关注的结构有效解决了模型对于复杂场景及遮挡检测效果不佳的问题。
输入图像经过卷积特征提取后传入该模块,在已知全局特征信息的前提下,Swin-Transformer采取滑动窗口获取特征图块并结合自注意力有效挖掘每个窗口中的潜在目标,发现部分被遮挡的目标。同时通过多头自注意力机制来进行特征相似度学习,提升检测性能的同时降低对运行速度的影响。Swin-Transformer模型结构如图1所示,模型参数如表2所示。
表 2 Swin-Transformer模型参数
Output size Swin-Transformer Stage1 4$ \times $(56$ \times $56) Concat 4$ \times $4, 96-d, LN $ \left[ {\begin{array}{*{20}{c}} {win.sz.}&{7 \times 7} \\ {\dim 96}&{head3} \end{array}} \right] \times 2 $ Stage2 8$ \times $(28$ \times $28) Concat 2$ \times $2, 192-d, LN $\left[ {\begin{array}{*{20}{c}} {win.sz.}&{7 \times 7} \\ {\dim {\text{192}}}&{head{\text{6}}} \end{array}} \right] \times 2$ Stage3 16$ \times $(14$ \times $14) Concat 2$ \times $2, 384-d, LN $\left[ {\begin{array}{*{20}{c}} {win.sz.}&{7 \times 7} \\ {\dim {\text{384}}}&{head{\text{12}}} \end{array}} \right] \times {\text{6}}$ Stage4 32$ \times $(7$ \times $7) Concat 2$ \times $2, 768-d, LN $\left[ {\begin{array}{*{20}{c}} {win.sz.}&{7 \times 7} \\ {\dim {\text{768}}}&{head{\text{24}}} \end{array}} \right] \times {\text{2}}$ 表2中,win.sz. 7x7代表使用窗口的尺寸,dim代表特征图通道的深度,head代表多头注意力模块中头部个数。计算方式如式(1)所示:
$$ \begin{split} &\quad {F_{attM}} = LN({F_{in}} + W-MSA({F_{in}})) \\ &\qquad {F_{mid}} = LN({F_{att}} + MLP({F_{att}})) \\ &{F_{attW-M}} = LN({F_{mid}} + SW-MSA({F_{mid}})) \\ &\quad {F_{out}} = LN({F_{attW-M}} + MLP({F_{attW-M}})) \end{split} $$ (1) 式中,MLP(*)为全连接神经网络,LN(*)为特征归一化处理,W-MSA(*)和SW-MSA(*)分别表示滑窗注意力机制和基于窗口转换的滑窗注意力机制,计算方式如式(2)所示:
$$ \begin{split} & W-MSA(q,k,v) = ({F_{in}}{w^q},{F_{in}}{w^k},{F_{in}}{w^v}) \\ & SW-MSA(q,k,v) = ({F_{in}}{w^q},{F_{in}}{w^k},{F_{in}}{w^v}) \\ &\qquad A = soft\max \left(\frac{{q \times {k^T}}}{{\sqrt {{d_k}} }}\right) \times v \end{split} $$ (2) 式中,
$ q $ 是查询矩阵,$ k $ 是键矩阵,$ v $ 是值矩阵,$ {d_k} $ 代表输入特征$ {F_{in}} $ 的通道维度,$ q{k^T} $ 代表不同输入矩阵间的注意力分数,缩放因子$ {\text{1/}}\sqrt {{d_k}} $ 负责提高稳定性。 -
YOLOv7模型Neck使用固定权重的多尺度融合模块将特征图进行拼接,未对多尺度融合模块的权重进行调整,且张量拼接对相邻层特征信息融合不全面,导致对小目标特征信息关注度不够,易造成特征信息的丢失;Head采用IDetect[26]衔接普通卷积,特征融合结果未侧重预期目标,缺乏针对性策略来提升小目标检测,导致模型对尺度相差较大目标及小目标检测效果不佳[27]。
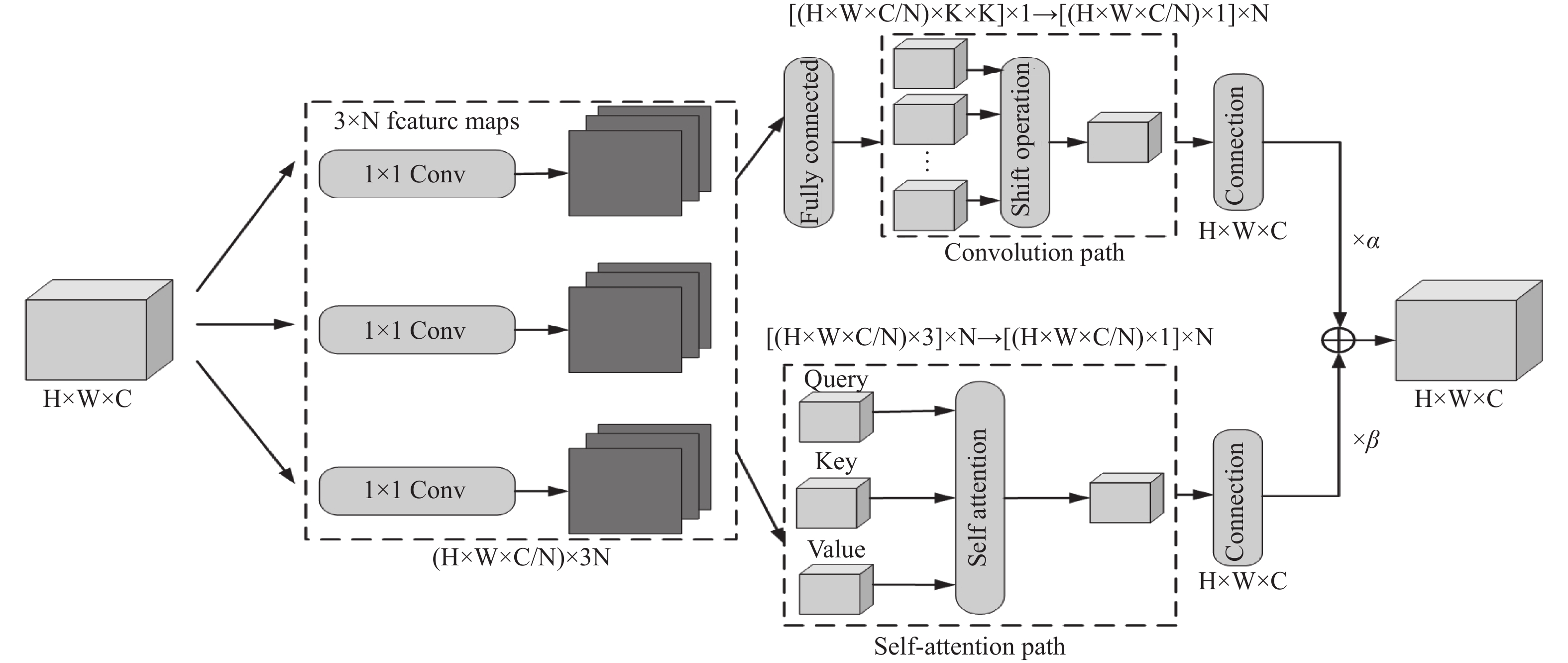
卷积注意力多注重输入与输出间的关系,而自注意力则多注重输入与输入间的关系。针对上述问题,本文结合卷积注意力和自注意力两者的优势,在多尺度融合中、低层引入ACmix模块帮助模型关注小目标特征,从特征中学习规律,对其重新校准,聚焦位置,两种注意力兼顾全局特征和局部特征,提升了模型对小目标的检测能力,同时分组卷积及特征关注的结构弥补了ELAN模块对复杂场景检测效果不佳的缺点,如图2所示。
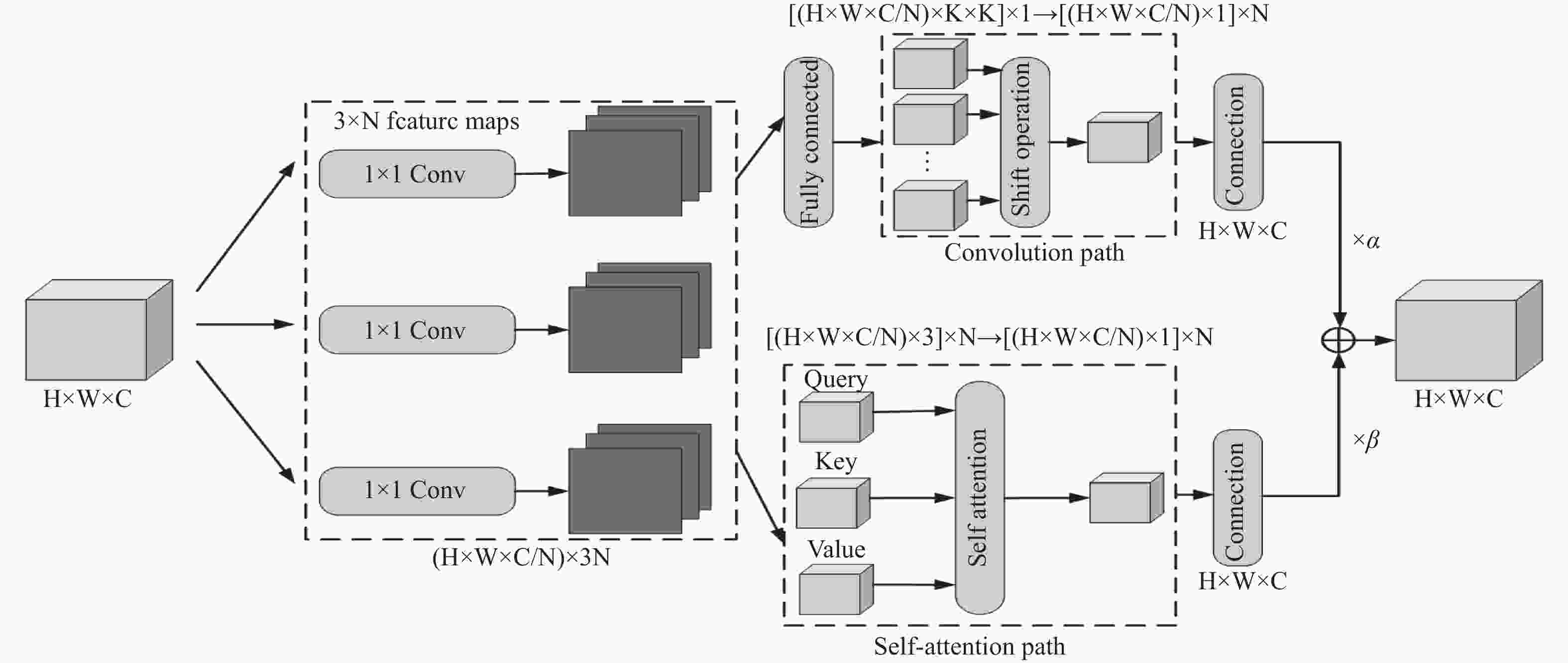
图 2 ACmix 结构
ACmix模块由卷积注意力和自注意力两个模块并行组成。卷积注意力根据卷积的权值对特征图的局部感受野使用一个聚合函数,这些权值在整个特征图中共享,为图像处理带来不可或缺的归纳偏差,可以将标准卷积概况为两个阶段,第一阶段将输入的特征图沿某个位置的核权重进行线性投射,第二阶段将投影后的特征图依据核位置进行平移,最后进行聚合。计算方式如式(3)所示:
$$ \begin{split} &\qquad\qquad Stage1:{{\tilde g}_{ij}}^{(p,q)} = {K_{p,q}}{f_{ij}}, \\ & Stage2:{g_{ij}}^{(p,q)} = Shift({{\tilde g}_{ij}}^{(p,q)},p - [k/2],q - [k/2]), \\ &\qquad\qquad\qquad {{\text{g}}_{ij}} = {\sum\limits_{p,q} {{g_{ij}}} ^{(p,q)}}. \end{split} $$ (3) 式中,K代表核尺寸,F,G分别代表输入、输出特征图,
$ {f_{ij}} $ ,$ {{\text{g}}_{ij}} $ 分别代表F和G对应像素(i,j)的特征张量,(p,q)代表核位置。自注意力采用基于输入特征上下文的加权平均操作,通过相关像素对之间的相似函数动态计算注意力权重,这种灵活性使注意力模块能够自适应地关注不同的区域,获得更大的感受野和上下文信息,捕获更多特征,并易于区分背景与目标。自注意力也可以分解为两个阶段,第一阶段进行1x1卷积,将输入特征投影为查询、键和值,第二阶段包含注意力权重的计算及值矩阵的聚合。计算方式如式(4)所示:
$$ \begin{split} & Stage1:q_{ij}^{(l)} = W_q^{(l)}{f_{ij}},k_{ij}^{(l)} = W_k^{(l)}{f_{ij}},v_{ij}^{(l)} = W_v^{(l)}{f_{ij}}, \\ & Stage2:{g_{ij}} = \mathop {||}\limits_{l = 1}^N \left(\sum\limits_{a,b \in {N_k}(i,j)} {A({q_{ij}}^{(l)},{k_{ab}}^{(l)})} v_{ab}^{(l)}\right). \end{split} $$ (4) 式中,
$W_q^{(l)}$ ,$W_k^{(l)}$ ,$W_v^{(l)}$ 代表查询、键和值的投影矩阵,${N_k}(i,j)$ 表示以(i,j)为中心的像素空间范围为k的局部区域,||为N个注意力头输出的串联。最后将两分支的输出结果经过合并,兼顾全局特征和局部特征,从而提升了模型对于小目标的检测性能。
-
YOLOv7网络采用CIOU[28]作为坐标损失函数,其主要考虑目标的重叠面积、中心点距离和纵横比,定义CIOU损失如式(5)所示:
$$ {L_{CIOU}}{{ = 1 - {\mathrm{IOU}} + }}\frac{{{\rho ^{\text{2}}}(b,{b^{gt}})}}{{{c^2}}} + \alpha \nu $$ (5) 式中,
$ b $ 和$ {b^{gt}} $ 分别代表目标框和预测框的中心点,$ c $ 代表能够覆盖两个Box的最小外接框的对角线距离,$ \rho $ 表示$ b $ 和$ {b^{gt}} $ 间的欧氏距离,$ \alpha $ 和$ \nu $ 表示测量宽高比之间的差异。由于Bounding Box回归是决定目标定位性能的关键步骤,而CIOU Loss并不能有效地描述Bounding Box的回归,且CIOU Loss涉及到反三角函数,在计算过程中会消耗一定的算力,致使损失函数收敛较慢,同时纵横比描述是相对值,存在一定的模糊,CIOU Loss也未考虑难易样本的平衡问题,导致检测精度也随之降低。因此,本文提出将基于焦点损失的回归损失应用于YOLOv7,通过回归过程聚焦高质量的先验框来加速模型训练过程的收敛速度,EIOU Loss在CIOU Loss的基础上分别计算宽高的差异值取代了纵横比,解决了纵横比的模糊定义,同时引入Focal Loss解决难易样本不平衡的问题,提升了模型的检测精度。EIOU Loss定义如式(6)所示:
$$ \begin{split} &\qquad\qquad {L_{EIOU}} = {L_{IOU}} + {L_{dis}} + {L_{asp}} \\ & {{ = 1 - {\mathrm{IOU}} + }}\frac{{{\rho ^2}(b,{b^{gt}})}}{{{{({w^c})}^2} + {{({h^c})}^2}}} + \frac{{{\rho ^2}(w,{w^{gt}})}}{{{{({w^c})}^2}}} + \frac{{{\rho ^2}(h,{h^{gt}})}}{{{{({h^c})}^2}}} \end{split} $$ (6) 式中,损失函数分为IOU损失
$ {L_{IOU}} $ ,距离损失$ {L_{dis}} $ ,方位损失$ {L_{asp}} $ ,$ {h^c} $ 代表最小包围框的高,EIOU Loss在增加长宽比相似度的同时,也考虑到模型如何通过焦点损失的回归过程减少$ (w,h) $ 和$ ({w^{gt}},{h^{gt}}) $ 之间的真实差异。因此,EIOU Loss通过直接减小目标框和先验框高度及宽度的差值,实现了更加精准的定位[29]。 -
本文环境搭配采用Windows10系统,CPU型号Intel 酷睿 i7 12700H,GPU型号NVIDIA GeForce RTX 3070Ti,显卡内存32G,编程语言python3.6,模型框架PyTorch1.7.1。设置实验初始学习率0.001,采用随机梯度下降法更新网络参数,学习动量为0.9,权重衰减率为0.0005。
-
Caltech Pedestrian Detection:此数据集为目前规模最大的街景行人数据集,具有人员遮挡、复杂背景、尺度变化大等多种场景,标注超25万帧,35万个矩形框,2300个行人,同时注明了不同矩形框间的时间关系及遮挡情况。
INRIA Person Dataset:此数据集为目前常见的静态人员检测数据集,其中人员均身处不同光照条件及地点,以站姿为主且高度均超过100个像素点,图片来自谷歌,故清晰度较高。
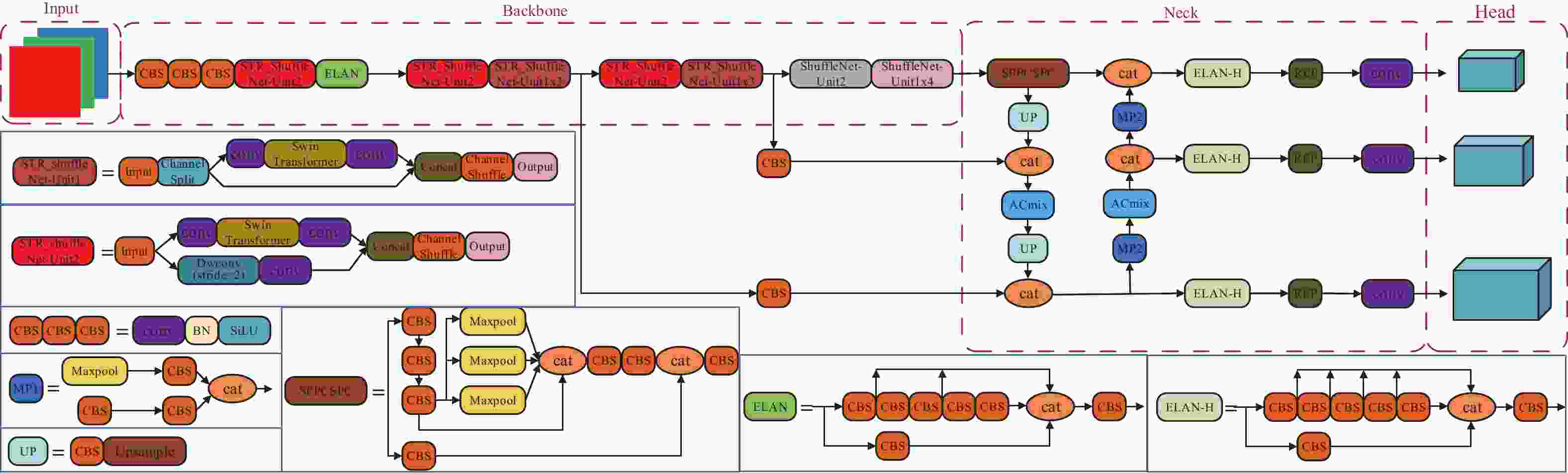
图 3 本文目标检测算法框架
自建矿井人员检测数据集:挑选矿井监控拍摄的两万帧图像构建数据集。首先使用ffmpeg工具将图像按帧切为图片,其次采用Python编写的Labelimg对图片中人员进行标注,最终转为适用于YOLO系列的txt文件。数据集涵盖井下多种环境:光照不均2267张、煤尘干扰1568张、目标遮挡3891张、其余环境1800张。
-
本文采用模型参数量、每秒帧率FPS、准确率
$ {M_p} $ 、召回率$ {M_r} $ 、漏检率$ {M_m} $ 、误检率$ {M_f} $ 及精确率均值mAP@0.5作为算法的评价指标。$$ {M_p} = \frac{{{T_p}}}{{{T_p} + {F_p}}} $$ (7) $$ {M_r} = \frac{{{T_p}}}{{{T_p} + {F_N}}} $$ (8) $$ {M_m} = \frac{{{F_N}}}{{{F_N} + {T_P}}} $$ (9) $$ {M_f} = \frac{{{F_p}}}{{{F_p} + {T_N}}} $$ (10) $$ mAP = \frac{{{T_p} + {T_n}}}{{{T_p} + {T_n} + {F_p}}} $$ (11) 式中,
$ {T_p} $ 代表被正确检测出的人员,$ {F_N} $ 代表未被检测到的人员,$ {F_p} $ 代表被误检的人员,$ {T_N} $ 代表未被误检的人员。 -
为验证YOLOv7模型在矿井人员检测方面性能的优越性,本文分别将Faster-CNN[30]、SDD[31]、YOLOv4、YOLOv5s、YOLOv5m、YOLOv5l及YOLOv7七种模型在自建矿井人员检测数据集上进行训练。输入图像大小为640x640,迭代次数为150次,批次大小为16,实验结果如表3所示。
表 3 常见检测算法实验结果
Model Parameter/M FPS $ M_{s} $ $ M_{r} $ $ M_{ \pm} $ $ M_{f} $ mAP@0.5 Faster CNN 68.2 41.6 0.842 0.809 0.101 0.133 0.833 SDD 82.1 32.9 0.850 0.855 0.214 0.125 0.864 YOLOv4 24.7 55.1 0.829 0.797 0.232 0.095 0.822 YOLOv5s 13.9 86.4 0.791 0.754 0.355 0.114 0.799 YOLOv5m 19.3 67.3 0.819 0.821 0.217 0.094 0.811 YOLOv5l 28.7 56.4 0.833 0.865 0.157 0.078 0.827 YOLOv7 26.3 59.4 0.857 0.832 0.179 0.097 0.849 在相同迭代次数内,由于YOLOv7模型参数的增加,模型检测速度低于YOLOv5s和YOLOv5m,但59.4帧每秒的速度已经满足矿井人员实时检测的需求;且YOLOv7模型在自建矿井人员数据集上其余评价指标基本优于其他模型,综合考虑下本文选择YOLOv7模型,并在此基础上进行改进以增强其在复杂环境中对矿井人员检测的各评价指标。
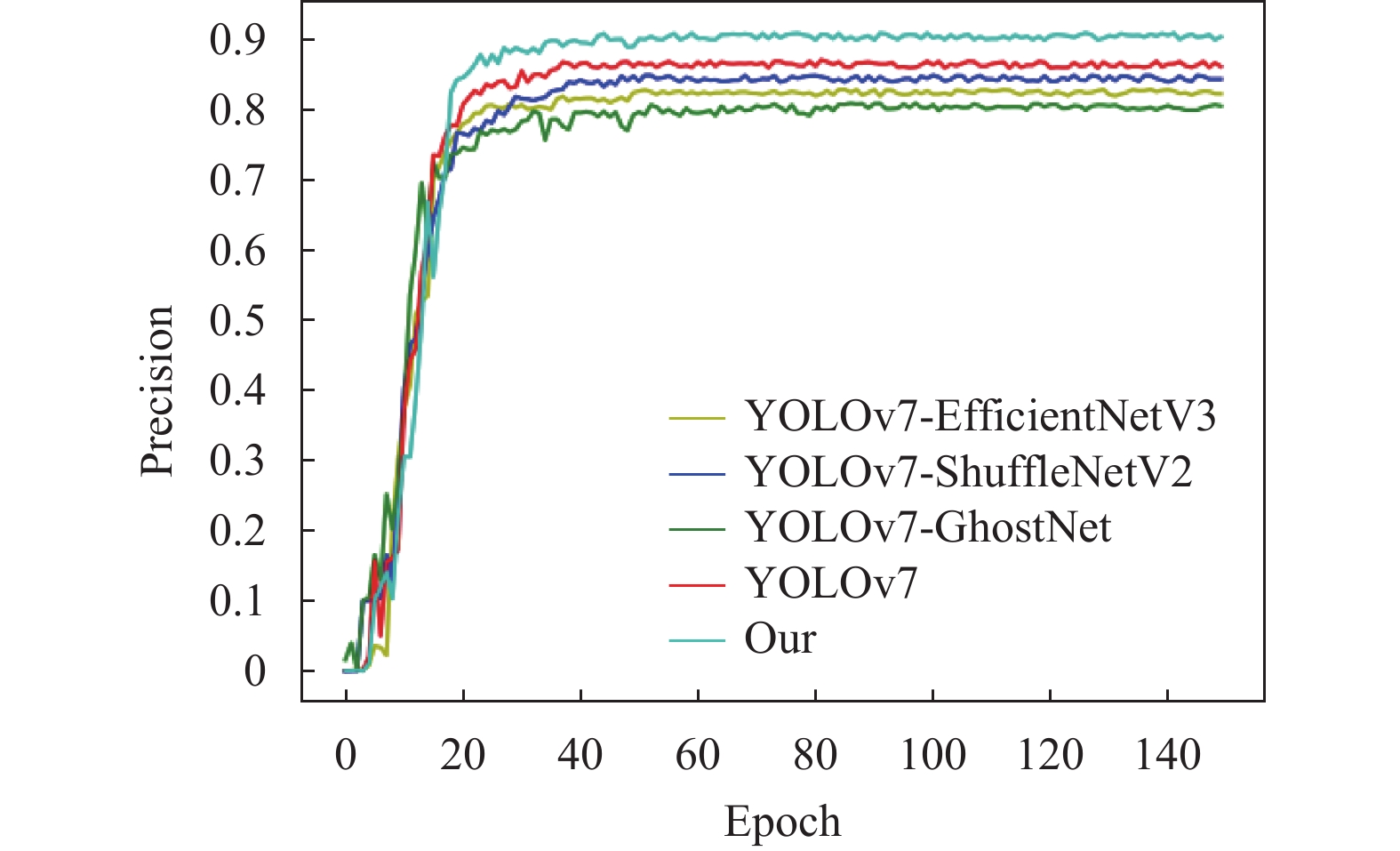
为验证本文算法改进的有效性及轻量化主干选择的合理性,将本文算法与YOLOv7、YOLOv7-EfficientNetV3、YOLOv7-GhostNet 、YOLOv7-ShuffleNetV2通过自建矿井人员检测数据集按照相同参数设置进行训练,结果如图4和图5所示。
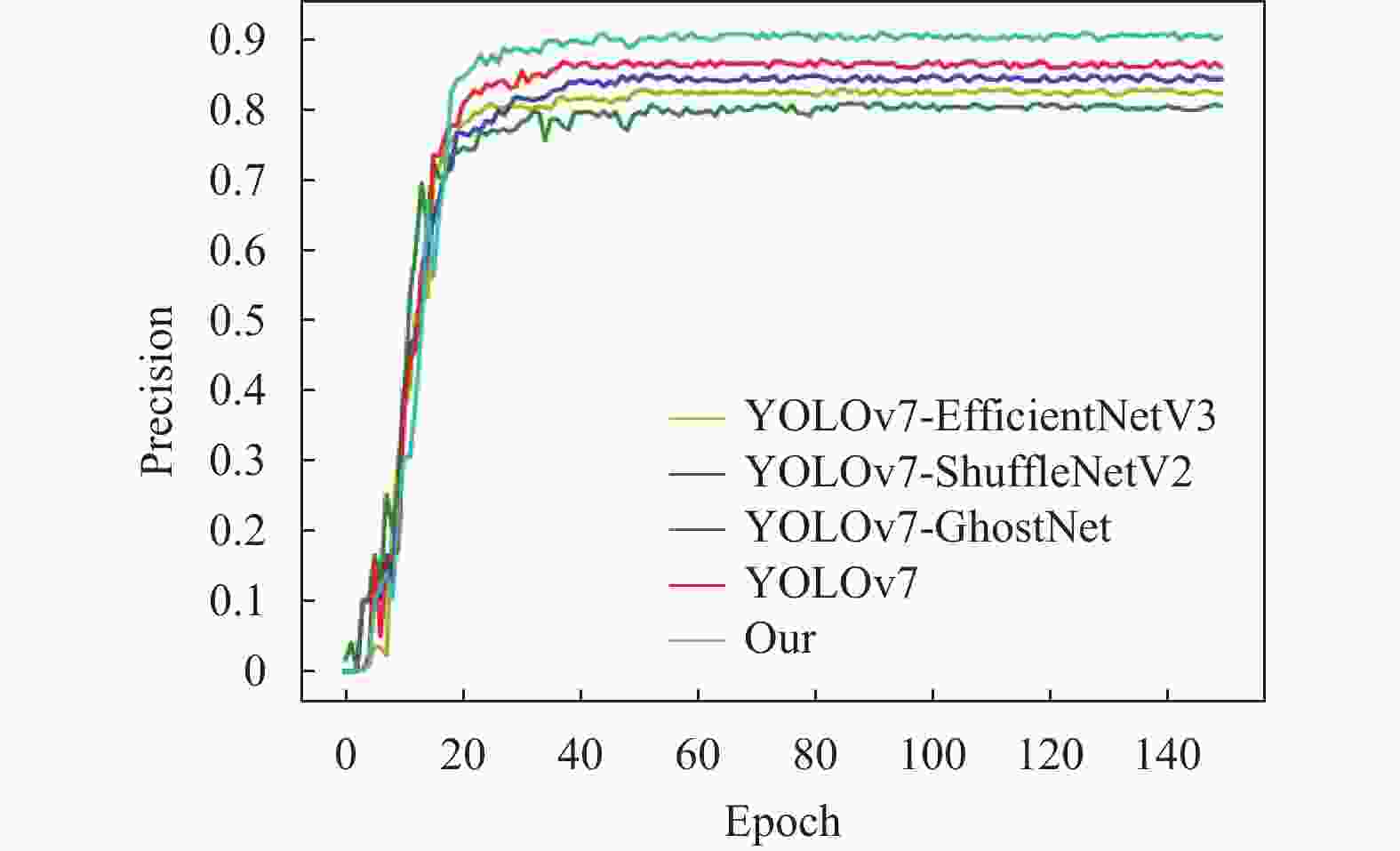
图 4 准确率曲线
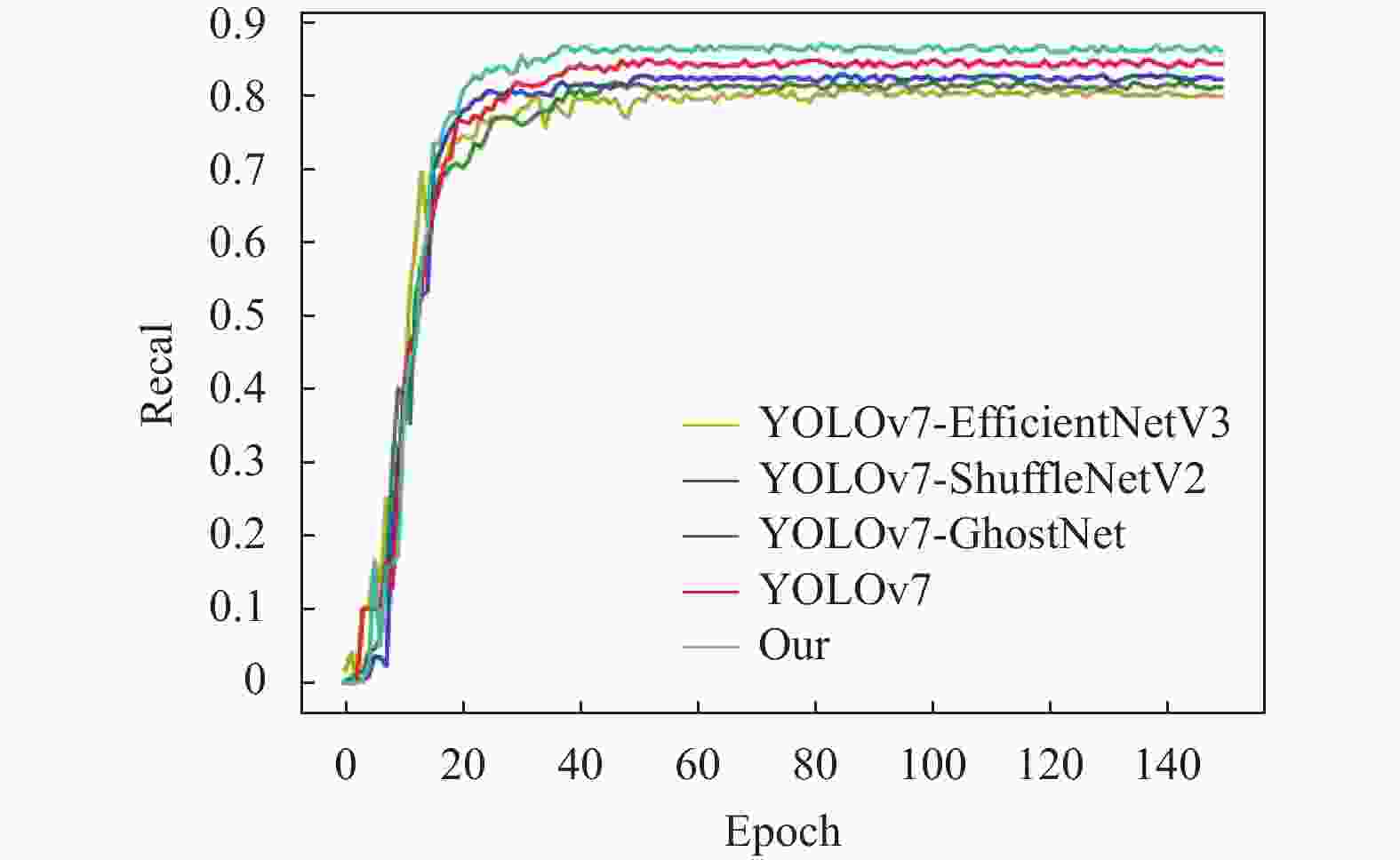
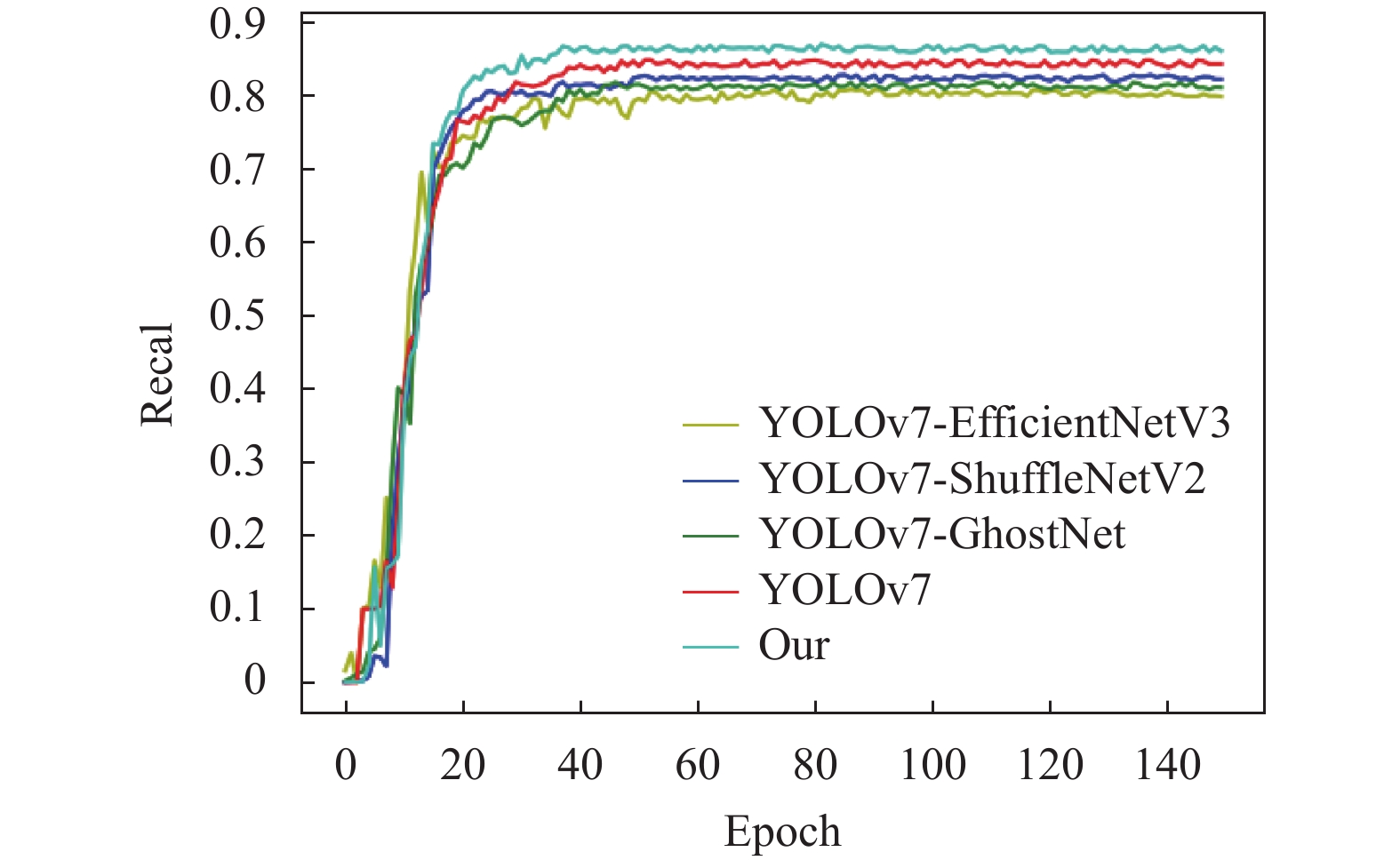
图 5 召回率曲线
原始YOLOv7迭代到30次时,准确率上升到0.85左右,最终收敛到0.86左右;YOLOv7-EfficientNetV3迭代到35次时,准确率上升到0.79左右,最终收敛到0.80左右;YOLOv7-ShuffleNetV2算法迭代到40次时,准确率上升到0.83左右,最终收敛到0.84左右;YOLOv7-GhostNet算法迭代到35次时,准确率上升到0.75左右,最终收敛到0.78左右;本文算法迭代到25次时,准确率上升到0.88左右,最终收敛到0.89左右。
原始YOLOv7算法迭代到40次时,召回率上升到0.82左右,最终收敛到0.83左右;YOLOv7-EfficientNetV3迭代到45次时,召回率上升到0.77左右,最终收敛到0.78左右;YOLOv7-ShuffleNetV2算法迭代到40次时,召回率上升到0.80左右,最终收敛到0.81左右;YOLOv7-GhostNet算法迭代到50次时,召回率上升到0.78左右,最终收敛到0.79左右;本文算法迭代到35次时,召回率上升到0.85左右,最终收敛到0.86左右。因此,本文算法的改进较YOLOv7相比具有显著的准确率及召回率提升;结合表4得知轻量化主干ShuffleNetV2可以保持较高精度及召回率的同时提升模型检测速度。
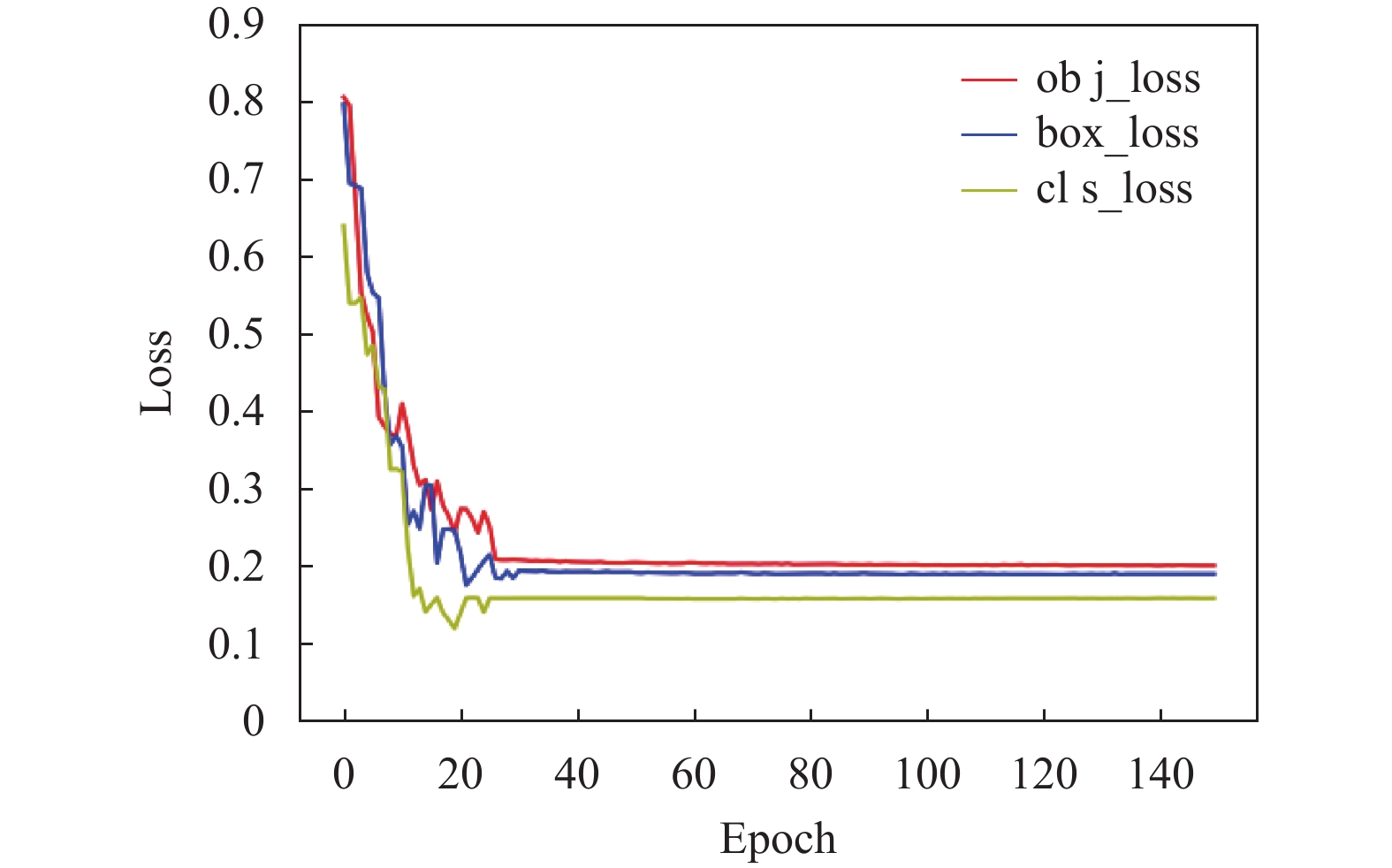
将本文算法通过自建矿井人员检测数据集进行训练,训练损失变化如图6所示,可以看出模型分类损失cls_loss、定位损失box_loss、置信度损失obj_loss随着训练进程均成下降趋势,在30次迭代训练后,模型趋于稳定,分类损失趋于拟合达到0.16左右;定位损失趋于拟合达到0.19左右;置信度损失趋于拟合达到0.21左右,均达到整体最优解,表明本文算法改进损失函数后模型具有良好的收敛能力及鲁棒性。
表 4 消融结果
Model ShuffleNetV2 Swin-Transformer ACmix EIOU Precision Recall mAP FPS 1 0.867 0.832 0.849 59.4 2 √ 0.841 0.812 0.824 79.9 3 √ √ 0.859 0.829 0.833 70.3 4 √ √ 0.853 0.845 0.831 69.9 5 √ √ 0.842 0.843 0.826 81.1 6 √ √ √ 0.889 0.853 0.877 65.9 7 √ √ √ √ 0.894 0.864 0.882 68.8 综上所述,本文选取的轻量化ShuffleNetV2主干使得模型保持一定精度的同时降低了计算量;主干的替换、注意力机制的引入、多尺度融合的改进、损失函数的优化对于目标检测性能有着明显的提升。因此,本文算法对于井下复杂环境中的人员检测具有良好的精度及鲁棒性。
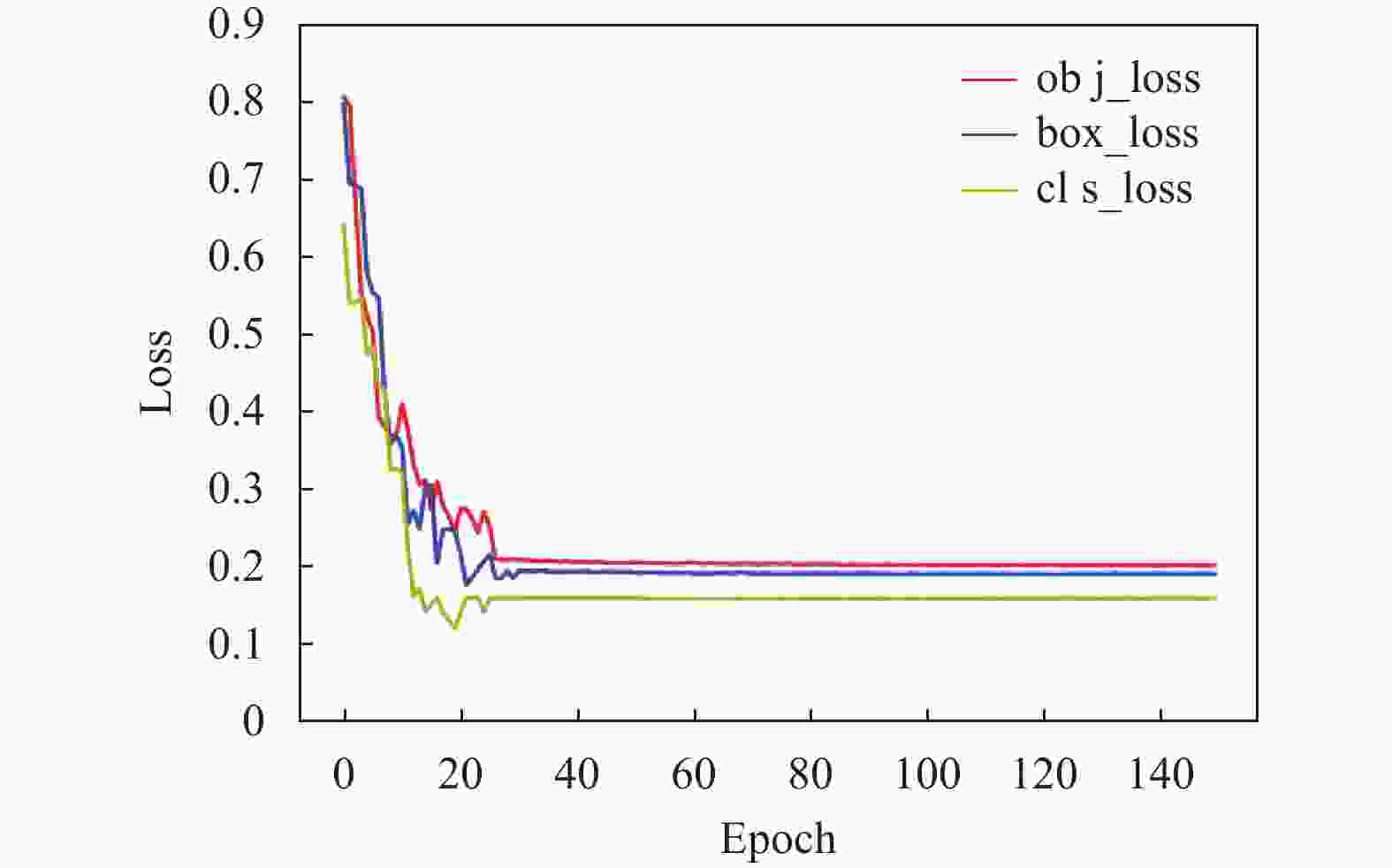
图 6 损失值曲线
本文在YOLOv7的基础上进行了主干网络的替换、注意力机制的引入、多尺度融合的改进、损失函数的优化。为验证各部分改进的有效性,以YOLOv7算法为基准,使用消融实验保持实验平台参数设置一致进行训练,消融实验结果如表4所示。
YOLOv7的主干网络替换后,准确率下降了3.1%,召回率下降了2.4%,速度提升了34.5%;在模型2的基础上添加Swin Transformer模块后,准确率提升了2.1%,召回率提升了1.9%,速度下降了12.0%;在模型2的基础上添加ACmix模块后,精度提升了1.4%,召回率提升了3.9%,速度下降了12.5%;在模型2的基础上,改进损失函数后,精度几乎不变,召回率提升了3.8%,速度提升了1.5%;在模型2的基础上同时添加Swin Transformer模块和ACmix模块,准确率提升了5.7%,召回率提升了5.0%,速度下降了17.5%;而本文算法较模型2相比,准确率提升了6.3%,召回率提升了6.4%,速度下降了13.8%;由此可知,分别对模型2进行注意力机制的引入、多尺度融合的改进,矿井人员检测性能提升有限,而将两种改进组合添加时,矿井人员检测性能获得了显著的提升,而损失函数的作用在于加速模型收敛的同时减少与目标框重叠较少的锚框,对边界回归进行优化,从而提升了对遮挡目标的检测精度。最终本文算法相较YOLOv7算法,准确率提升了3.1%,召回率提升了3.8%,速度提升了15.8%。综上所述,通过消融实验验证了模型各部分改进的有效性,并且本文算法在自建矿井人员检测数据集上较原始YOLOv7算法具有显著的优势。
为了进一步验证本文算法的泛化性能及在小目标检测方面的提升,将三种数据集中目标GT框按照[0, 32x32], [32x32, 96x96], [96x96, 640x640]区间分为大中小三类进行验证,并分别统计检测结果的精度,性能指标对比如表5所示。
表 5 公开数据集实验结果
数据集 性能指标 YOLOv7 Our 大 中 小 总 大 中 小 总 Caltech Pedestrian Detection Precision 0.884 0.882 0.865 0.877 0.908 0.903 0.901 0.904 Recall 0.849 0.846 0.837 0.844 0.890 0.870 0.874 0.878 mAP 0.873 0.875 0.847 0.865 0.884 0.882 0.880 0.882 INRIA Person Dataset Precision 0.814 0.810 0.788 0.804 0.856 0.853 0.850 0.853 Recall 0.850 0.844 0.829 0.841 0.864 0.865 0.860 0.863 mAP 0.803 0.813 0.775 0.797 0.852 0.852 0.846 0.850 自建矿井人员检测数据集 Precision 0.879 0.869 0.853 0.867 0.895 0.894 0.893 0.894 Recall 0.831 0.839 0.826 0.832 0.869 0.860 0.863 0.864 mAP 0.863 0.853 0.831 0.849 0.883 0.883 0.880 0.882 通过定量分析表5中三组数据集中YOLOv7算法与本文算法的性能指标,得出YOLOv7算法小目标检测性能均明显低于对大中目标的检测性能,而本文算法针对小目标检测方面的改进有着显著的效果,缩短了三种尺寸检测性能之间的差距,且检测精度能够基本持平;本文算法整体性能在不同数据集上验证也均优于YOLOv7算法。综上所述,YOLOv7模型能实现对大、中目标的检测,但检测尺度不够宽广,特征提取不够精细,不适合矿井小目标及遮挡情况的检测,而本文算法进行针对性改进后不仅适用于矿井人员小目标检测,在多尺度变化、目标形变,雾霾干扰、光照剧烈、部分遮挡等场景中检测效果也均优于YOLOv7算法,因此,本文算法具有良好的泛化性与小目标检测性能。
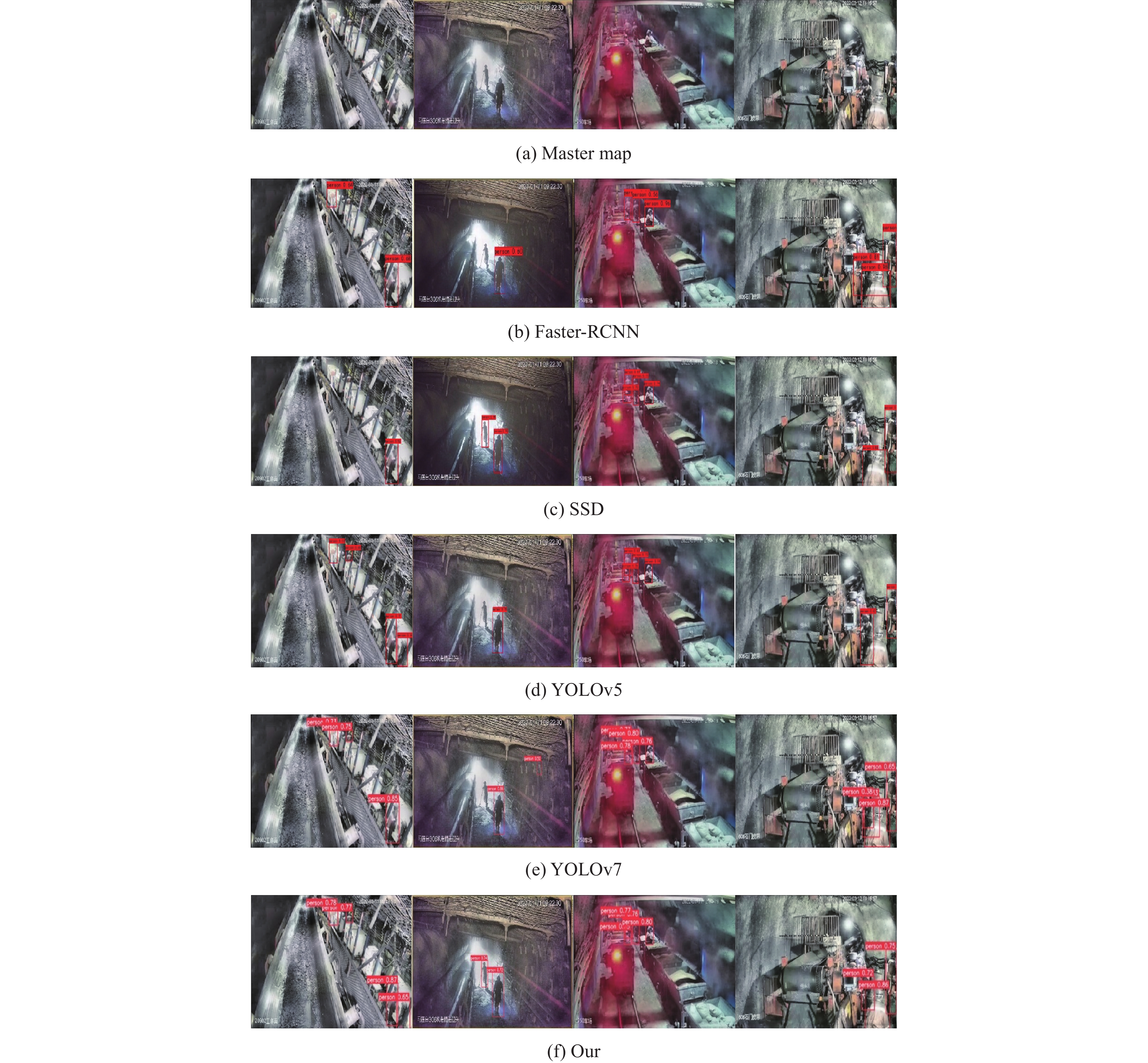
为了更加直观的展示本文算法的检测效果,将本文算法与当前四种主流算法在矿井不同场景中进行检测测试,检测结果如图7所示。

图 7 主流算法检测结果
从第一张图片中观察到光照不均现象严重,Faster-RCNN、SSD、YOLOv7均出现漏检现象,而本文算法引入Swin-Transformer基于全局感受野进行增强,对于遮挡现象达到了良好的检测效果;从第二张图片中观察到煤尘干扰现象严重,Faster-RCNN、YOLOv5、YOLOv7均出现漏检现象,其中YOLOv7出现了误检情况,而本文注意力模块的添加,提升了目标在复杂环境中的对比度,有效的抑制了煤尘的干扰。从第三张图片中观察到目标较小,Faster-RCNN出现漏检现象,SSD、YOLOv5、YOLOv7表现良好,本文算法从增强小目标注意力出发,在多尺度融合阶段中层和低层引入ACmix模块帮助网络重点关注小目标特征,兼顾输入与输入之间的关系及输入与输出之间的关系,减少了漏检情况的发生。从第4张图片中观察到目标遮挡情况严重,SSD、YOLOv5出现漏检现象,YOLOv7出现误检情况,而本文算法检测效果良好,并且本文EIOU的引入减少了目标框与先验框的宽度和高度的差值,使得定位更加精准。综上所述,本文算法在井下多种复杂环境中检测效果良好,与当前主流目标检测算法相比更适用于矿井人员检测。
-
本文提出了一种改进YOLOv7的矿井人员检测算法,在YOLOv7的基础上,使用ShuffleNetV2轻量化主干,同时在shuffle_block中引入Swin Transformer注意力机制,保持一定精度的同时降低了模型计算量;在多尺度融合阶段中层和低层引入ACmix模块帮助网络关注小目标特征,提升模型对小目标的检测能力;引入EIOU损失减小目标框和先验框高度与宽度的差值,实现更加精准的定位。
利用自建矿井人员检测数据集对本文算法进行验证,结果表明,本文算法准确率达89.4%。检测速率达68.8FPS,满足井下人员实时检测的要求,为矿井安全生产提供了良好的保障,对于煤矿开采向智能化开采过渡具有重要意义。
Mine personnel detection algorithm based on improved YOLOv7
-
摘要: 矿井人员的实时检测是建设智慧矿山必不可少的内容,通过视频监测井下人员,从而实现危险区域预警及联动控制,对于矿井安全生产具有重要意义。现阶段可见光图像识别技术针对井下昏暗环境中人员的辨识还有待完善。针对井下光照不均、煤尘干扰严重导致监控视频存在噪声多、图像模糊等问题,提出一种改进YOLOv7的矿井人员检测算法。该算法在YOLOv7的基础上进行改进,首先针对ELAN模块直接拼接形成通道隔离的问题,提出基于通道重组与特征关注的复杂场景检测方式:使用ShuffleNetV2作为主干网络,减少参数量,提升算法推理速度,促进通道间的信息流动;将Swin Transformer注意力机制引入shuffle_block中,提升图像中人员的关注度,抑制复杂环境对人员检测的干扰,同时Transformer优异的全局感受野有利于遮挡目标的检测;其次针对特征融合结果未侧重预期目标且模型缺乏针对性策略提升小目标检测性能,在颈部多尺度融合网络添加ACmix模块,兼顾全局特征和局部特征,提升了算法对小目标的检测能力;最后引入Efficient IOU Loss提升算法收敛速度的同时减小目标框及先验框高度和宽度的差值,实现更加精准的定位。通过公开行人数据集及自建矿井人员检测数据集验证表明:该算法较YOLOv7模型相比检测精度提升了3.1%,达到89.4%;召回率提升了3.8%,达到86.4%;速度提升了15.8%,达到68.8FPS;满足矿井人员实时检测的工作要求。
-
关键词:
- 矿井人员检测 /
- YOLOv7 /
- Swin-Transformer /
- ACmix /
- Efficient IOU Loss
Abstract: Real-time detection of mine personnel is an essential part of the construction of intelligent mine. It is of great significance to realize early warning and linkage control of dangerous areas by monitoring underground personnel through video, which is of great significance for mine safety production. At present, the visible light image recognition technology needs to be improved for the identification of personnel in the dim environment of underground coal mine. Aiming at the problems of more noise and image blur in the monitoring video caused by uneven illumination and serious coal dust interference in the underground, this paper proposes an improved YOLOv7 mine personnel detection algorithm. Firstly, aiming at the problem of channel isolation caused by direct splicing of ELAN modules, a complex scene detection method based on channel reorganization and feature attention is proposed. The ShuffleNetV2 is used as the backbone network to reduce the number of parameters, improve the reasoning speed of the algorithm, and promote the information flow between channels. At the same time, the Swin Transformer attention mechanism is introduced into shuffle_block to improve the attention of people in the image and suppress the interference of complex environment on personnel detection. At the same time, the excellent global receptive field of Transformer is conducive to the detection of occlusion targets. Secondly, in view of the fact that the feature fusion results did not focus on the expected target and the model lacked targeted strategies to improve the detection performance of small targets, the ACmix module was added to the neck multi-scale fusion network to take into account both global features and local features, which improved the detection ability of the algorithm for small targets. Finally, Efficient IOU Loss is introduced to improve the convergence speed of the algorithm and reduce the difference between the height and width of the target frame and the prior frame to achieve more accurate positioning. Through the verification of public pedestrian data sets and self-built mine personnel detection data sets, it is shown that the detection accuracy of the proposed algorithm is 3.1% higher than that of the YOLOv7 model, reaching 89.4%. The recall rate increased by 3.8% to 86.4%. A 15.8% speedup of 68.8FPS Meet the mine personnel real-time detection work requirements.-
Key words:
- mine personnel detection /
- YOLOv7 /
- Swein-Transformer /
- ACmix /
- Efficient IOU Loss
-
表 1 改进ShuffleNetV2结构
层数 输出大小 核大小 步长 重复 通道数 Image 224 $ \times $ 2243 Conv1 112 $ \times $ 1123 $ \times $ 32 1 24 DW conv 56 $ \times $ 563 $ \times $ 32 1 24 Stage2 28 $ \times $ 282 1 116 Stage2 28 $ \times $ 281 3 116 Stage3 14 $ \times $ 142 1 232 Stage3 14 $ \times $ 141 7 232 Stage4 7 $ \times $ 72 1 464 Stage4 7 $ \times $ 71 3 464 Conv5 7 $ \times $ 71 $ \times $ 11 1 1024 Global pooling 1 $ \times $ 17 $ \times $ 7 下载: 导出CSV
下载: 导出CSV
表 2 Swin-Transformer模型参数
Output size Swin-Transformer Stage1 4 $ \times $ (56$ \times $ 56)Concat 4 $ \times $ 4, 96-d, LN$ \left[ {\begin{array}{*{20}{c}} {win.sz.}&{7 \times 7} \\ {\dim 96}&{head3} \end{array}} \right] \times 2 $ Stage2 8 $ \times $ (28$ \times $ 28)Concat 2 $ \times $ 2, 192-d, LN$\left[ {\begin{array}{*{20}{c}} {win.sz.}&{7 \times 7} \\ {\dim {\text{192}}}&{head{\text{6}}} \end{array}} \right] \times 2$ Stage3 16 $ \times $ (14$ \times $ 14)Concat 2 $ \times $ 2, 384-d, LN$\left[ {\begin{array}{*{20}{c}} {win.sz.}&{7 \times 7} \\ {\dim {\text{384}}}&{head{\text{12}}} \end{array}} \right] \times {\text{6}}$ Stage4 32 $ \times $ (7$ \times $ 7)Concat 2 $ \times $ 2, 768-d, LN$\left[ {\begin{array}{*{20}{c}} {win.sz.}&{7 \times 7} \\ {\dim {\text{768}}}&{head{\text{24}}} \end{array}} \right] \times {\text{2}}$
下载: 导出CSV
表 3 常见检测算法实验结果
Model Parameter/M FPS $ M_{s} $ $ M_{r} $ $ M_{ \pm} $ $ M_{f} $ mAP@0.5 Faster CNN 68.2 41.6 0.842 0.809 0.101 0.133 0.833 SDD 82.1 32.9 0.850 0.855 0.214 0.125 0.864 YOLOv4 24.7 55.1 0.829 0.797 0.232 0.095 0.822 YOLOv5s 13.9 86.4 0.791 0.754 0.355 0.114 0.799 YOLOv5m 19.3 67.3 0.819 0.821 0.217 0.094 0.811 YOLOv5l 28.7 56.4 0.833 0.865 0.157 0.078 0.827 YOLOv7 26.3 59.4 0.857 0.832 0.179 0.097 0.849
下载: 导出CSV
表 4 消融结果
Model ShuffleNetV2 Swin-Transformer ACmix EIOU Precision Recall mAP FPS 1 0.867 0.832 0.849 59.4 2 √ 0.841 0.812 0.824 79.9 3 √ √ 0.859 0.829 0.833 70.3 4 √ √ 0.853 0.845 0.831 69.9 5 √ √ 0.842 0.843 0.826 81.1 6 √ √ √ 0.889 0.853 0.877 65.9 7 √ √ √ √ 0.894 0.864 0.882 68.8
下载: 导出CSV
表 5 公开数据集实验结果
数据集 性能指标 YOLOv7 Our 大 中 小 总 大 中 小 总 Caltech Pedestrian Detection Precision 0.884 0.882 0.865 0.877 0.908 0.903 0.901 0.904 Recall 0.849 0.846 0.837 0.844 0.890 0.870 0.874 0.878 mAP 0.873 0.875 0.847 0.865 0.884 0.882 0.880 0.882 INRIA Person Dataset Precision 0.814 0.810 0.788 0.804 0.856 0.853 0.850 0.853 Recall 0.850 0.844 0.829 0.841 0.864 0.865 0.860 0.863 mAP 0.803 0.813 0.775 0.797 0.852 0.852 0.846 0.850 自建矿井人员检测数据集 Precision 0.879 0.869 0.853 0.867 0.895 0.894 0.893 0.894 Recall 0.831 0.839 0.826 0.832 0.869 0.860 0.863 0.864 mAP 0.863 0.853 0.831 0.849 0.883 0.883 0.880 0.882
下载: 导出CSV
-
[1] ZHANG K, KANG L, CHEN X, et al. A review of intelli gent unmanned mining current situation and development trend[J]. Energies, 2022, 15(2): 513. doi: 10.3390/en15020513 [2] 单鹏飞, 李晨炜, 来兴平等. 模拟暗湿工况下煤矸混合体态势热敏图像精准辨识实验[J/OL]. 煤炭学报: 1-12 3-04-14]. SHAN Pengfei, LI Chenwei, LAI Xingping, et al. Experiment on Accurate identification of thermal image of coal-gangue mixture under a simulated dusky and wet condition[J/OL]. Journal of china Coal Society, 1-12[2023-04-14]. [3] HE K M, GKIOXARI G, DOLLÁR P, et al. Mask R-CNN[C]//Proceedings of the IEEE International Conference on Computer Vision. New York: IEEE, 2017: 2980-2988. [4] ZHU H G. An efficient lane line detection method based on computer vision[J]. Journal of Physics:Conference Series, 2021, 1802(3): 032006. doi: 10.1088/1742-6596/1802/3/032006 [5] LI X Y, WANG S, LIU B, et al. Improved YOLOv4 network using infrared images for personnel detection in coal mines[J]. Journal of Electronic Imaging, 2022, 31(1): 013017. [6] DU Y X, TONG M M, ZHOU L L, et al. Edge detection based on Retinex theory and wavelet multiscale product for mine images[J]. Applied Optics, 2016, 55(34): 9625-9637. doi: 10.1364/AO.55.009625 [7] 寇发荣, 肖伟, 何海洋等. 基于改进YOLOv5的煤矿井下目标检测研究[J]. 电子与信息学报, 2023, 45(07): 2642-2649. KOU Farong, XIAO Wei, HE Haiyang, et al. Research on tarage detection in underground coal mines based on improved YOLOv5[J]. Journal of Electronics & Information Technology, 2023, 45(07): 2642-2649. [8] 邵小强, 李鑫, 杨涛等. 改进YOLOv5s和DeepSORT的井下人员检测及跟踪算法[J]. 煤炭科学技术, 2023, 51(10): 291-301. SHAO Xiaoqiang, LI Xin, YANG Tao, et al. Underground personnel detection and tracking based on improved YOLOv5s and DeepSORT[J/OL]. Coal Science and Technology, 2023, 51(10): 291-301. [9] 李江昀, 赵义凯, 薛卓尔, 等. 深度神经网络模型压缩综述[J]. 工程科学学报, 2019, 41(10): 1229-1239. LI J Y, ZHAO Y K, XUE Z E, et al. A survey of model compression for deep neural networks[J]. Chinese Journal of Engineering, 2019, 41(10): 1229-1239. [10] WANG C Y, BOCHKOVSKIY A, LIAO H Y M. YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors[EB/OL]. [2023-06-01]. http://arxiv.org/abs/2207.02696. [11] MA N N, ZHANG X Y, ZHENG H T, et al. ShuffleNet V2: practical guidelines for efficient CNN architecture design[C]//European Conference on Computer Vision. Cham: Springer, 2018: 122-138. [12] LIU Z, LIN Y T, CAO Y, et al. Swin transformer: Hierarchical vision transformer using shifted windows[C]//Proceedings of the IEEE/CVF International Conference on Computer Vision. New York: IEEE, 2021: 9992-10002. [13] PAN X R, GE C J, LU R, et al. On the integration of self-attention and convolution[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. New York: IEEE, 2022: 805-815. [14] CHEN C Y, LIU M Y, TUZEL O, et al. R-CNN for small object detection[C]//Asian Conference on Computer Vision. Cham: Springer, 2017: 214-230. [15] ZHANG Y F, REN W Q, ZHANG Z, et al. Focal and efficient IOU loss for accurate bounding box regression[J]. Neurocomputing, 2022, 506(C): 146-157. [16] REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: Unified, real-time object detection[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. New York: IEEE, 2016: 779-788. [17] REDMON J, FARHADI A. YOLO9000: Better, faster, stronger[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. New York: IEEE, 2017: 6517-6525. [18] REDMON J, FARHADI A. YOLOv3: An incremental improvement[EB/OL]. [2018-04-08] https://arxiv.org/abs/1804.02767 [19] BOCHKOVSKIY A, WANG C Y, LIAO H Y M. YOLOv4: Optimal speed and accuracy of object detection[EB/OL]. [2023-06-01]. http://arxiv.org/abs/2004.10934. [20] SONG Q S, LI S B, BAI Q, et al. Object detection method for grasping robot based on improved YOLOv5[J]. Micromachines, 2021, 12(11): 1273. doi: 10.3390/mi12111273 [21] DING X H, ZHANG X Y, MA N N, et al. RepVGG: Making VGG-style ConvNets great again[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. New York: IEEE, 2021: 13728-13737. [22] 张旭, 周云成, 刘忠颖, 等. 基于改进ShuffleNet V2模型的苹果叶部病害识别及应用[J]. 沈阳农业大学学报, 2022, 53(1): 110-118. ZHANG X, ZHOU Y C, LIU Z Y, et al. Identification and application of apple leaf diseases based on improved ShuffleNet V2 model[J]. Journal of Shenyang Agricultural University, 2022, 53(1): 110-118. [23] SANDLER M, HOWARD A, ZHU M L, et al. MobileNetV2: Inverted residuals and linear bottlenecks[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. New York: IEEE, 2018: 4510-4520. [24] XIA Z F, PAN X R, SONG S J, et al. Vision transformer with deformable attention[EB/OL]. [2023-06-01]. http://arxiv.org/abs/2201.00520. [25] NIU Z Y, ZHONG G Q, YU H. A review on the attention mechanism of deep learning[J]. Neurocomputing, 2021, 452: 48-62. doi: 10.1016/j.neucom.2021.03.091 [26] WANG C Y, YEH I H, LIAO H Y M. You only learn one representation: Unified network for multiple tasks[EB/OL]. [2023-06-01] . http://arxiv.org/abs/2105.04206. [27] RISHAV, SCHUSTER R, BATTRAWY R, et al. ResFPN: Residual skip connections in multi-resolution feature pyramid networks for accurate dense pixel matching[C]//Proceedings of the 25th International Conference on Pattern Recognition. New York: IEEE, 2021: 180-187. [28] ZHENG Z H, WANG P, REN D W, et al. Enhancing geometric factors in model learning and inference for object detection and instance segmentation[J]. IEEE Transactions on Cybernetics, 2022, 52(8): 8574-8586. doi: 10.1109/TCYB.2021.3095305 [29] ZHANG Y F, REN W Q, ZHANG Z, et al. Focal and efficient IOU loss for accurate bounding box regression[J]. Neurocomputing, 2022, 506(C): 146-157. [30] REN S Q, HE K M, GIRSHICK R, et al. Faster R-CNN: Towards real-time object detection with region proposal networks[C]//Proceedings of the IEEE Transactions on Pattern Analysis and Machine Intelligence. New York: IEEE, 2017: 1137-1149. [31] LIU W, ANGUELOV D, ERHAN D, et al. SSD: single shot MultiBox detector[C]//European Conference on Computer Vision. Cham: Springer, 2016: 21-37. -

 点击查看大图
点击查看大图
图(7) / 表(5)
计量
- 文章访问数: 268
- HTML全文浏览量: 82
- PDF下载量: 3
- 被引次数: 0














































