 ISSN
ISSN 


 下载:
下载:


-
风切变是指风速或风向在某一方向上突然变化的一种大气现象,一般把高度低于600 m的风切变称为低空风切变,其中微下暴流是低空风切变最主要的一种形式。低空风切变是空难事故的罪魁祸首。
2014年台湾复兴航空GE222航班失事的罪魁祸首就是低空风切变。仅在2014年,包括亚航在内的22起空难事故共造成992人死亡。这是自2005年死亡1014人以来死亡人数最多的一年。造成飞机空难事故的原因或多或少都与风切变有关。
低空风切变尤其是微下击暴流风切变对飞机的飞行安全造成严重的威胁,主要的表现形式是飞机的轨迹严重偏离预定轨迹,飞行高度急剧损失等。所以提高飞机的飞行安全就要克服上述困难,维持既定航迹和飞行高度,是飞机设计者必须考虑的实际问题。
文献[1]研究了低空风切变的成因以及对飞行器产生的危害,但没有对微下击暴流风切变进行建模与分析;文献[2-3]研究了起飞阶段微下击暴流对飞机的影响,没有考虑降落阶段微下击暴流对飞机着陆轨迹的改变;文献[4]研究了风切变下民用飞机起飞三维可视化仿真,对降落阶段没有进行仿真分析。
当飞行器(飞机等)遭遇微下击暴流应该采取什么样的控制方法来成功避开危险区才是问题关键所在。文献[5-7]研究了飞机在降落过程中的控制算法,文献[8-10]研究了飞机在自由状态时候(即此时飞机不受飞行员的控制)的控制算法。
本文将深入分析起飞和着陆阶段时微下击暴流对飞机的影响,并研究相应的控制算法,使其避开微下击暴流危险区。
-
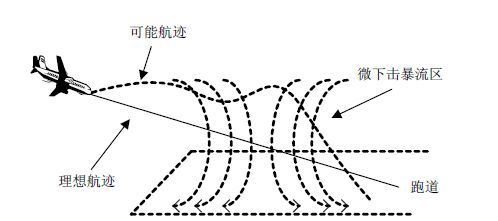
飞机在起飞或降落过程中最容易遇到风切变,其在降落过程中遭遇微下击暴流风切变的情形如图 1所示。

图 1 飞机遭遇微下击暴流风切变
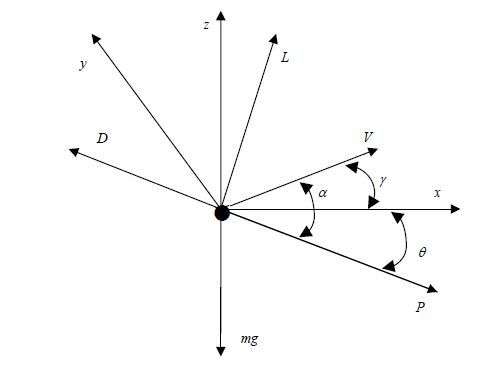
不失一般性,本文将飞行器假设成一个质点,其受力示意图(假设该飞行器处在降落过程中)如图 2所示。

图 2 飞机受力示意图
$$\eqalign{ & m\frac{{{\text{d}}V}}{{{\text{dt}}}} = P\cos \alpha - D - mg\sin \theta + \cr & m{w_x}\cos \theta + m{w_y}\sin \theta \cr} $$ (1) $$\eqalign{ & mV\frac{{{\text{d}}\theta }}{{{\text{dt}}}} = P\sin \alpha + L - mg\cos \theta - \cr & m{w_x}\sin \theta + m{w_y}\cos \theta \cr} $$ (2) $$\frac{{{\text{d}}x(t)}}{{{\text{dt}}}} = V\cos \theta + {w_x}$$ (3) $$\frac{{{\text{d}}h(t)}}{{{\text{dt}}}} = V\sin \theta + {w_y}$$ (4) 式中,V为飞行器空速;m为飞行器质量;g为重力加速度;P为发动机动力;D和L分别为飞行器的阻力和升力;x和h为飞行器在水平和垂直方向上的位移;α为飞行器迎角;θ为飞行器下滑的轨迹角。
飞行器空速V和γ航向角分别为:
$$V = \sqrt {{{(\dot x + {u_x})}^2} + {{(\dot z + {u_y})}^2}} $$ (5) $$\gamma = {\tan ^{ - 1}}\left( {\frac{{{u_y} + \dot z}}{{{u_x} + \dot x}}} \right)$$ (6) 式中, $\dot x$ 表示飞行器地速; $\dot z$ 表示飞行器垂直速度。
飞行器升力L、阻力D以及飞机迎角α分别[14]为:
$$L = \frac{1}{2}\rho {V^2}{C_L}S$$ (7) $$D = \frac{1}{2}\rho {V^2}{C_D}S$$ (8) $$\alpha = \theta + \gamma $$ (9) 式中,ρ为空气密度;S为机翼面积;CL和CD分别为飞行器的升力系数和阻力系数。
-
图 3是比例积分微分控制(proportion integration differentiation,PID)的原理框图,由比例、积分和微分3个部分[16-17]构成。

图 3 PID控制原理图
图 3中,r(t)为定值,e(t)为控制偏差,u(t)是由r(t)经过比例、积分、微分3个不同单元处理后的输出量。
PID控制算法可以应用于飞机起飞过程中的控制模型非线性化处理,该传统控制算法在一定程度上可以缓解飞机遭遇风切变时的危险性,但要在动态对象高度机动的情况下做出可靠的决策,PID还存在一定的不足。在飞机起飞阶段,飞机自身的阻尼力矩因大气密度变小而减小,从而阻尼不足导致飞机在遇到风切变时发生与理想轨迹相偏离的情形。
-
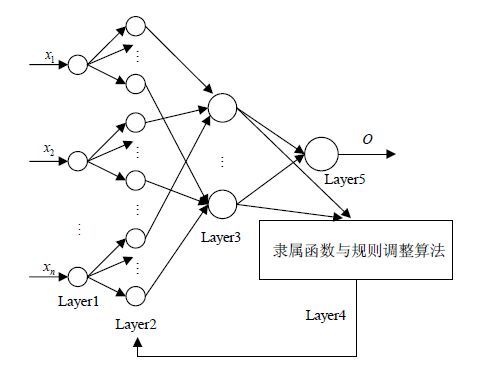
自组织模糊神经网络(self-organizing fuzzy neural network,SOFNN)控制算法的主要原理框图如图 4所示[18-19]。

图 4 模糊神经网络控制算法模型图
图 4中,Layer1为接收传感器数据输入层,Layer5为输出控制信号O输出层,Layer2~Layer4为自组织模糊神经网络层。模糊神经网络控制算法主要过程为:首先接受x1、x2、……、xn输入量,再将输入量根据隶属函数进行模糊化,接着进行推理运算和相关模糊化处理,最后输出推理的运算结果。
该控制算法可改善飞机在遇到风切变时的静稳定性,飞机在遇到危险的大气现象时,首先由敏感部件检测飞机的飞行状态,然后由综合计算装置根据预置命令进行比较计算,输出控制信号给执行机构驱动操纵舵面,从而产生空气动力和力矩来控制飞机的飞行状态。
-
在Vicroy模型中,3个不同方向上的速度Wx、Wy、Wz可以分别表示为:
$${W_x} = {u_w} + {d_x}$$ (10) $${W_y} = {v_w} + {d_y}$$ (11) $${W_z} = {w_w} + {d_z}$$ (12) 式中,dx、dy、dz是Vicroy坐标系中微下击暴流的分量;uw、vw、ww是x、y、z方向上的空速。Vicroy模型中比例因子λ为:
$$\lambda {\text{ = }}\frac{{2{u_m}}}{{{r_p}({e^{c1}} - {e^{c2}}){e^{1/2\alpha }}}}$$ (13) 式中,c1、c2为Vicroy常量;α为冲角;um为最大速度, $\sqrt {W_x^2 + W_y^2 + W_z^2} $ 其值可表示为;rp为最大水平风速的半径。
-
当飞机遭遇微下击暴流时,最好的方法是避开危险区,飞机逃避微下击暴流低空风切变的轨迹如图 5所示。

图 5 飞机逃避轨迹
飞行器在遭遇微下击暴流时需要机载气象雷达提前对其进行检测,以便留出足够的时间供飞行员采取相应策略,避开危险区。一般情形下,若机载气象雷达能够提前30 s检测到前方的微下击暴流低空风切变危险区域,则飞机成功脱险的概率很大。建立高度z的数学表达式为:
$$z = h(\vec x({t_f})) + \int_0^{{t_f}} {g(\vec x,\vec u,t)} {\text{d}}t$$ (14) 式中, $h(\vec x({t_f}))$ 为参考高度,根据微下击暴流的真实环境特性以及在空间坐标系中的分布,建立x、y、z向上的风速uw、vw和ww的数学模型:
$${u_w} = \frac{{\lambda x}}{2}[{e^{{c_1}({x^2}/{z_m})}} - {e^{{c_2}({y^2}/{z_m})}}]{e^{[\frac{{2 - ({x^2} + {y^2})}}{{2\alpha }}]}}$$ (15) $${v_w} = \frac{{\lambda y}}{2}[{e^{{c_1}(z/x \cdot {z_m})}} - {e^{{c_2}(z/y \cdot {z_m})}}]{e^{[\frac{{2 - ({x^2} + {y^2})\alpha /r}}{{2\alpha }}]}}$$ (16) $$\eqalign{ & {w_w} = - \lambda \left\{ {\frac{x}{{{c_1}}}[{e^{{x^2}(z/{z_m})}} - 1] - \frac{y}{{{c_2}}}[{e^{{c_2}({x^2}/{z_m})}} - 1]} \right\} \times \cr & [1 - \frac{{{x^2} + {y^2}}}{{2r}}] \cr} $$ (17) 式中,wx表示垂直风速的强度;r表示微下击暴流半径;λ为比例因子;zm表示水平风速。水平风速和垂直风速都是关于x、y的函数。
考虑到飞行员要有足够的时间反应以及控制算法系统保障统一化的要求,可以用该控制处理算法建立其预测模型;首先建立线性预测模型,然后借助非线性自组织方法对线性模型改进,以得到更准确的非线性模型。
-
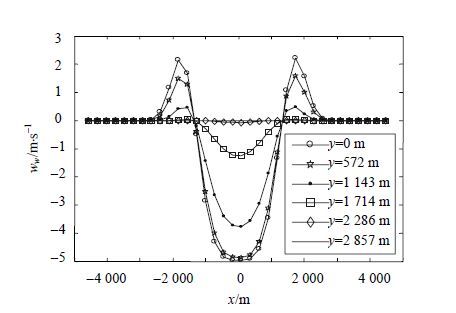
微下击暴流中心非对称风场的大小取2.8 km×2.8 km×0.15 km的范围,风场在载机地理坐标系中的起始坐标为(x,y)=(-4,5) km,非对称风场中心位置坐标为(x,y)=(-0.4,2.6) km。图 6和图 7是在不同y值下的垂直风速与水平风速。

图 6 不同y值下的垂直风速

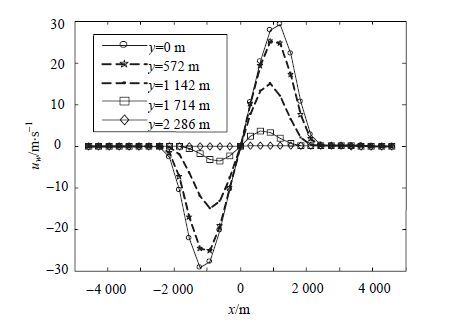
图 7 不同y值下的水平风速
从图 6和图 7可以看出,微下击暴流中心处风速值最大,随着y值的变化,其水平风速和垂直风速呈正弦波变化。其变化趋势是和实际的微下击暴流特性一致的。

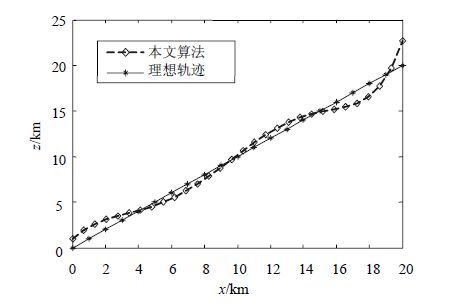
图 8 起飞过程中飞机运动轨迹
图 8是飞机在起飞阶段的运动轨迹和理想情形下的起飞运动轨迹的对比分析,可以看出,本文算法与理想轨迹相逼近。由于实际非对称风场的因素,其运动轨迹会稍偏离理想轨迹。
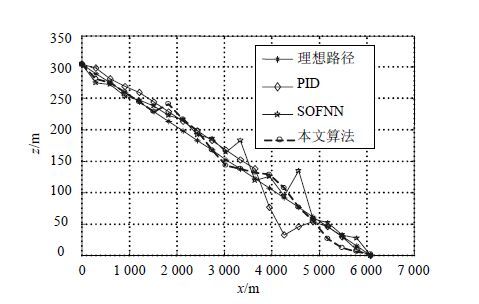
为了对比分析传统的PID和SOFN算法与本文算法的性能,图 9仿真分析了在降落过程中不可控制算法的下降轨迹。可以看出,传统的PID和SOFN算法与理想路径控制算法在水平距离为4 000 m处波动较大,且与理想轨迹相差较大,而本文算法在0~7 000 m处的轨迹与理想路径较吻合,波动较小。显示出本文算法与理想轨迹较接近。

图 9 降落过程中不同控制算法下轨迹对比
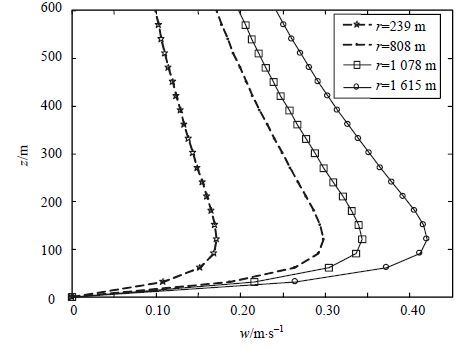
径向速度在衡量飞行控制策略上是要考虑的一个主要因素。本文选取不同高度进行仿真分析。通过图 10可以看出,其径向速度在不同的微下击暴流高度上的变化趋势,在300 m同一高度处,随着微下击暴流中心半径的增大其径向速度也逐渐增大,以便飞行员等采取相应的策略。

图 10 径向速度与微下击暴流高度变化关系
飞机在低空(一般是低于600 m)中遭遇微下击暴流风切变是一个多因素综合型问题,涉及到流体力学、动力学等因素。所以控制算法至关重要,可以为飞行员留出足够的时间选择策略逃避危险区。假设在上升过程中遭遇微下击暴流风切变时,上升遇到风切变,不可盲目地提高速度,因为强行加大动力和冲角会使飞机失去重心从而导致机毁人亡。假设飞机在着陆过程中遭遇微下击暴流风切变时(如图 9所示),下滑通道正好通过微下击暴流风切变,那么飞机会突然地非正常下降,偏离原有的下滑轨迹,有可能高度过低造成危险。当飞机飞出微下击暴流风切变气流后,又进入了顺风气流,使飞机与气流的相对速度突然降低,由于飞机在着陆过程中本来就在不断减速,飞机的飞行速度必须大于最小速度才能保持其理想的轨迹,突然减速很可能使飞机进入失速状态,飞行姿态不可控,故在着陆过程中不应该盲目减速,要根据其控制算法选择合适的路径逃避风切变区域。
-
微下击暴流风切变的控制算法是飞机起飞或降落过程中遭遇低空风切变危险区最为关键的一个因素,在分析经典Vicroy微下击暴流数学模型的基础上提出了一种新的微下击暴流风切变控制算法。再将提出的控制算法与传统的PID和SOFNN控制算法进行对比分析。最后通过仿真分析,验证了本文算法的可行性与有效性。
The Research of Nonlinear Wind Shear Signal Processing and Control Algorithm
-
摘要: 针对微下击暴流风切变会对飞行器造成严重危害的情况,分析了微下击暴流风切变的成因和Vicroy数学模型,为了使飞机有效避开微下击暴流风切变危险区,结合空气动力学和飞行力学,提出了飞行控制算法,并与传统的控制算法进行了对比分析;仿真结果表明,提出的控制算法能较好地实现路径控制,并优于传统的PID和SOFNN控制算法。Abstract: The microburst wind shear can be dangerous to aircraft, particularly causing fatal crash. In this paper, the cause of microburst wind shear and Vicroy mathematical model are analyzed and a new flight control algorithm is proposed by combining aerodynamics and flight mechanics to avoid the danger area of the microburst wind shear. The simulation results show that the proposed control algorithm can achieve a better path control than better than the traditional PID and SOFNN control algorithm.
-
Key words:
- microburst /
- path programming /
- wind shear /
- wind velocity
-
[1] ZHANG Y, CHEN H, HU W, et al. Flicker mitigation by individual pitch control of wariable speed wind turbines with DFIG[J]. IEEE Transactions on Energy Conversion, 2014, 29(1):20-28. [2] GIRSANG I P, DHUPIA J S, MUULJADI E, et al. Models to study dynamic effects of modern wind turbines[J]. IEEE Transactions on Industry Applications, 2014, 50(6):3777-3786. [3] OZDEMIR A, SEILER P, BALAS G J. Design tradeoffs of wind turbine preview control[J]. IEEE Transactions on Control Systems Technology, 2013, 21(4):1143-1154. [4] 刘时杰, 徐浩军, 薛源, 等. 具有湍流效应的不规则微下击暴流构建方法研究[J]. 飞行力学, 2014, 32(4):303-307. LIU Shi-jie, XU Hao-jun, XUE Yuan, et al. Construction-method of irregular microburst with turbulence effect[J]. Flight Dynamics, 2014, 32(4):303-307. [5] 蒋立辉, 陈红, 庄子波, 等. 小波不变矩的低空风切变识别[J]. 红外与激光工程, 2014, 43(11):3783-3787. JIANG Li-hui, CHEN Hong, ZHUANG Zi-bo, et al. Recognition on low-level wind shear of wavelet invariant moments[J]. Infrared and Laser Engineering, 2014, 43(11):3783-3787. [6] ELSAYED A E, JULIE E M, XING M. Empirical models for predicting unsteady-state downburst wind speeds[J]. Journal of Wind Engineering and Industrial Aerodynamics, 2014, 129:49-63. [7] 武虎子, 耿建中, 罗振谊, 等. 大型飞机在风切变环境中飞行安全尺度分析[J]. 飞行力学, 2013, 31(4):305-308. WU Hu-zi, GENG Jian-zhong, LUO Zhen-yi, et al. Analysis of flight safety scale in windshear for large aircraft[J]. Flight Dynamics, 2013, 31(4):305-308. [8] HANDLER R A, QI ZHANG. Direct numerical simulations of a sheared interface at low wind speeds with applications to infrared remote sensing[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2013, 6(3):1086-1091. [9] AN Zhen-yu, SHI Zhen-wei, TENG Xi-chao, et al. An automated airplane detection system for large panchromatic image with high spatial resolution[J]. International Journal for Light and Electron Optics, 2014, 125(12):2768-2775. [10] SEID H P, KIANI M, HASSANPOUR A. Optimal trajectory planning for flight through microburst wind shears[J]. Aerospace Science and Technology, 2011, (15):567-576. [11] 陶杨, 韩维, 吴亮. 虚拟时变微下击暴流的数值仿真方法[J]. 应用力学学报, 2014, 31(6):847-853. TAO Yang, HAN Wei, WU Liang. The numerical simulation method of the microburst under the virtual time-varying[J]. Chinese Journal of Applied Mechanics, 2014, 31(6):847-853. [12] YAN Z, PARTHA S, HUI H. An experimental study on wind loads acting on a high-rise building model induced by microburst-like winds[J]. Journal of Fluids and Structures, 2014, 50:547-564. [13] TAKASHI N. Nonlinear-map model for the control of an airplane schedule[J]. Physica A:Statistical Mechanics and its Applications, 2013, 392(24):6545-6553. [14] 吴仁彪, 韩雁飞, 李海. 基于压缩感知的低空风切变风速估计方法[J]. 电子与信息学报, 2013, 35(10):2512-2517. WU Ren-biao, HAN Yan-fei, LI Hai. Wind speed estimation for low-attitude wind shear via compressive sensing[J]. Journal of Electronics & Information Technology, 2013, 35(10):2512-2517. [15] YAN Z, HUI H, PARTHA P S. Comparison of microburst-wind loads on low-rise structures of various geometric shapes[J]. Journal of Wind Engineering and Industrial Aerodynamics, 2014, 133:181-190. [16] BOCHAO C, PARTHA P S. Numerical simulation of dynamic response of a long-span bridge to assess its vulnerability to non-synoptic wind[J]. Engineering Structures, 2015, 84(1):67-75. [17] 吴扬, 姜守达. 基于嵌套粒子群算法的多涡环微下击暴流模型参数选择方法[J]. 电子学报, 2012, 40(1):204-208. WU Yang, JIANG Shou-da. Parameters selection method of multiple vortex-ring microburst model based on nested particle swarm optimization[J]. Acta Electronica Sinica, 2012, 40(1):204-208. [18] 罗琪楠, 段海滨, 严林芳. 风切变下民用飞机起飞三维可视化仿真[J]. 智能系统学报, 2014, 9(1):19-25. LUO Qi-nan, DUAN Hai-bin, YAN Lin-fang. Threedimensional visual simulation of civil aircraft taking off in wind shear[J]. CAAI Transactions on Intelligent Systems, 2014, 9(1):19-25. [19] HAITHAM A, GIRMA B, ASHRAF D. Turbulence characterization of downbursts using LES[J]. Journal of Wind Engineering and Industrial Aerodynamics, 2015, 136:44-61. -

 点击查看大图
点击查看大图
图(10)
计量
- 文章访问数: 4728
- HTML全文浏览量: 1206
- PDF下载量: 320
- 被引次数: 0
