 ISSN
ISSN 


 下载:
下载:
-
Event structures[1]are nowadays widely recognized models of true concurrency[2-3]. They are closely related to Petri Nets, but mathematically more tractable.
Interleaving[4-5] and step[6-7] are two discriminating views of event structures, which respectively use single actions and steps (i.e., multi-sets of simultaneously occurring actions) as the basic execution unit. In Ref.[7], step is applied to give a non-interleaving semantics to Communicating Sequential Processes (CSP), called step failure semantics. Step gives a more precise account of concurrency than interleaving, e.g., the systems a|b and ab+ba are distinguished.
Van Glabbeek studied various semantic equivalences in the linear time-branching time spectrum[8], this paper only focuses on two canonical semantics, trace semantics and singleton failures (SF) semantics, which are respectively representatives of linear time semantics and branching time semantics.
Currently, established system equivalences for event structures, such as trace and testing equivalences, require the observed actions to be exactly identical. However, accurate measurement is impossible in the case of physical world, therefore, exact equivalence is restrictive and not robust.
The notion of distance between the original event structure and the target event structure is much more adequate in this context[9]. Instead of requiring the observed actions of the two event structures to be equal, the distance between them is only required to remain bounded by some parameter called precision of the approximation.
In our earlier work[10], we present a generalized framework of transition system approximation by developing the notions of approximate language equivalence and approximate SF equivalence. Now, we extend the obtained results to event structures. In this paper, using Baire metric[11], we propose a generalized framework of event structures approximation including approximate interleaving (trace and SF) equivalence and approximate step (trace and SF) equivalence. Note that the proposed framework captures the traditional exact equivalence as a special case.
The unique feature of these approximate equivalences is that they satisfy the transitive property. Hence, for an original complex event structure, we can successively use these approximate equivalences to obtain an equivalent event structure with lesser complexity.
-
The following notations are used throughout the paper. N denotes the set of all natural numbers (including zero), R denotes the set of all real numbers, and Φ denotes the empty set. For l, l'∈R, max(l, l') denotes the larger one between l and l'. For a set π, |π| denotes the number of elements of π, π∞ denotes both finite and infinite sequences over π. A closed interval is denoted with square brackets. For example [0, 1] means greater than or equal to 0 and less than or equal to 1. The infimum (or supremum) of a subset S of real numbers is denoted by inf(S) (or sup(S)) and is defined to be the largest (or least) real number which is smaller (or greater) than or equal to all numbers in S.
Definition 1 A metric on a set π is a function (called the distance function) d:π×π→[0, +∞] such that ∀x, y, z∈π,
1) d(x, y)=0 iff (if and only if) x=y (identity of indiscernibles);
2) d(x, y)=d(y, x) (symmetry);
3) d(x, z)≤d(x, y)+d(y, z) (triangular inequality).
Definition 2 A pseudo-metric on a set π is a function d:π×π→[0, +∞] such that:
∀x, y, z∈π, d(x, x)=0, d(x, y)=d(y, x), d(x, z)≤d(x, y)+d(y, z)
A metric space is an ordered pair (π, d) where π is a set and d is a metric on π. A pseudo-metric space is an ordered pair (π, d) where π is a set and d is a pseudo-metric on π. Note that, for pseudo-metric space, the distance between two distinct points can be zero, in other words, d(x, y)=0 does not necessarily imply that x=y. And this is critical to Hausdorff distance (see below).
Definition 3 Baire metric dB:π∞xπ∞→[0, 1] is defined as follows:
$$ {d_B}({\rho _1}, {\rho _2}) = \left\{ \begin{gathered} 0, |{\rho _1} = {\rho _2} \hfill \\ {2^{ - l}}, {\text{otherwise}} \hfill \\ \end{gathered} \right. $$ where l∈N is the length of the longest common prefix of Ρ1 and Ρ2.
For brevity, if Ρ1=Ρ2 we define l=+∞ no matter what the length of Ρ1.
It is easy to verify that dB satisfies all conditions of metric. Hence (π∞, dB) is a metric space and dB(Ρ1, Ρ2) measures the similarity between Ρ1 and Ρ2, the lower the value, the more similar the two sequences.
Definition 4 π1 and π2 are two non-empty subsets of π∞ while (π∞, dB) is a matric space.
Then their Hausdorff distance is defined as follows:
$$ {d_H}({\pi _1}, {\pi _2}) = \max (\sup \;\operatorname{i} \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{n} f{d_B}({\rho _1}, {\rho _2}), \sup \;\operatorname{i} \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle-}$}}{n} f{d_B}({\rho _1}, {\rho _2})) $$ Informally, for matric space, two non-empty subsets are close in their Hausdorff distance, if every point of either subset is close to some point of the other subset. In other words, Hausdorff distance dH is the greatest of all the distances from a point in one subset to the closest point in the other subset.
It is easy to prove that dH(π1, π2)=0 iff cl(π1)=cl(π2) where cl(π1) and cl(π2) denote the topological closures of π1 and π2 respectively. Moreover, dH is a pseudo-metric.
-
We use event structures equipped with a labbelling function l to obtain labelled event structures. An event E such that l(e)=a should be thought of as an occurrence of an action a that the system may perform. In fact, an action identifies the external aspect of an event. Since different event occurrences can ‘look the same’ from an external observer, the labbelling function may associate the same action with different events. Moreover, since some events may be not externally observable, they associate to a distinguished symbol τ which is used to denote the invisible or internal actions. A denotes the set of observable actions.
Definition 5 A labelled event structure is a quadruple E=(E, ≼, #, l), where E is a countable set of events; ≼ is a partial ordering relation on E called the causality relation, such that ∀e∈E, ↓e={e'∈E| e'≼e} (↓e is the left closure of E) is finite (every event in E is finitely preceded); # is a symmetric, irreflexive relation on E called the conflict relation, such that ∀e, e', e"∈E, e≼e' and e#e" implies e'#e" (conflict is hereditary); l: E→A∪τ is a labelling function.
If no confusion arises, event structure will be referred to as labelled event structure.
The concurrency relation is defined by~E=(E×E)-(≼∪≼-1∪#), where symbol -is the set minus operator and ≼-1 is the inverse relation of ≼. The subscript restricts the domain of concurrency relation to E. The following example shows that the subscript of concurrency relation is necessary.
Example 1
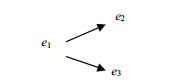
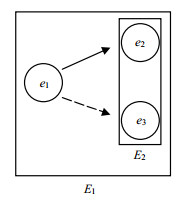
Consider two event structures E1 and E2 in Fig. 1, where partial ordering relation is depicted by arrow (omitting those derivable by transitivity) and conflict relation is depicted by dashed line (omitting those derivable by conflict heredity). The events of E1 are e1, e2, e3 where e1≼e2 and e1# e3. E2 is the restriction of E1 to {e2, e3}. Then, we have ${e_2}, {e_3} \in { \sim _{{E_2}}}$ Since conflict is hereditary, ${e_2}, {e_3} \notin { \sim _{{E_1}}}$.

Figure 1. The subscript of concurrency relation
An execution of an event structure is a configuration. The notion of a configuration captures the intuition that an event can occur only after all the events that lie in its past have occurred. Formally, the definition is as follows.
Definition 6 A set is called a configuration of E iff
1) C is conflict-free in E, i.e., ∀e, e'∈C not (e#e');
2) C is left-closed in E, i.e., ∀e∈C, ∀e'∈E, e'≼e implies e'∈C;
3) |C| is finite.
The set of all configurations of E is denoted by C(E). Since ø⊆E is conflict-free and left-closed, |ø| is finite, ø∈C(E).
The semantics of event structures is typically given as partially ordered sets[1], or labelled partially ordered sets[12], an alternative semantical view on event structures is to consider configurations and the transitions between them.
Definition 7 A labelled transition system is a tuple (Q, Q0, Σ, →), where Q is a (possibly infinite) set of states; Q0⊆Q is a (possibly infinite) set of initial states; Σ is a (possibly infinite) set of action labels; →⊆QxΣxQ is a set of transitions.
A configuration C represents a state of E, namely, the state in which the events in C have occurred. Hence C(E) is the set of states. The initial state of E is the state where no action has been occurred yet. Hence ø is the set of initial states.
Example 2
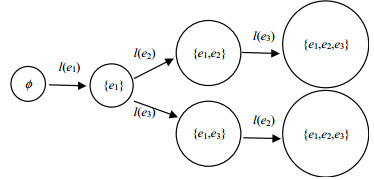
A trivial event structure E3 is shown in Fig. 2, and the labelling function satisfies that l(e1)=a, l(e2)=b and l(e3)=c. C(E3)={ø, {e1}, {e1, e2}, {e1, e3}, {e1, e2, e3}}.

Figure 2. Event structure E3
Interleaving and step are respectively used in sequential nondeterministic event structures and concurrent deterministic event structures, where sequential means that every two events in the event structure are either causally related or conflicting (~E=ø), deterministic means that the event structure does not contain any pair of conflicting events (#=ø).
-
In this section, we define approximate trace equivalence and approximate SF equivalence based on interleaving semantics. In the interleaving semantics, an event structure progresses through a sequence of single actions. An occurrence of a single action $a \in A \cup \tau $ leads to the state changing from configuration C1 to configuration C2, denoted by ${C_1}{\mathop \to \limits^a _I}{C_2}$, iff C1⊂C2 and $\exists $e∈E such that C2-C1={e}, l(e)=a. Let ${ \to _I}$ denote the set of all the leading relations. Hence:
${ \to _I}$={(C1, a, C2)∈C(E)×A$ \cup $τ×C(E) | ${C_1}{\mathop \to \limits^a _I}{C_2}$}
Write ε for the empty sequences of actions, a, δ for the concatenation of a∈A$ \cup $τ and δ∈(A$ \cup $τ)∞. The generalized transition ${\mathop \to \limits^\delta _I}$ is defined recursively by:
$$ \left\{ \begin{gathered} C{\mathop \to \limits^\varepsilon _I}C \hfill \\ C{\mathop \to \limits^{a\delta } _I}C''\;\;{\text{is}}\;{\text{equal}}\;{\text{to}}\;{\text{by}}\;{\text{definition}}\;C{\mathop \to \limits^a _I}C'{\mathop \to \limits^\delta _I}C''\; \hfill \\ \end{gathered} \right. $$ It is straightforward to show that (C(E), ø, A$ \cup $τ, ${ \to _I}$) forms a labelled transition system.
Definition 8 TSI(E)=(C(E), ø, A$ \cup $τ, ${ \to _I}$) is called the interleaving view of E.
It is convenient to describe interleaving view by directed graphs. Each state is represented by a circle, the corresponding configuration is shown inside the circle, and a transition from one state to another is indicated by an arrow with a label.
Example 3
Consider again E3 from Example 2, we denote the interleaving view of E3 by Fig. 3.

Figure 3. The interleaving view of E3
-
δ∈(A∪τ)∞ is an interleaving trace of E if $\exists $C∈C(E) such that $\phi {\mathop \to \limits^\delta _I}$ C. Let TI(E) denote the set of all interleaving traces of E. Note that repeated elements are counted only once in TI(E).
The traditional exact interleaving trace equivalence is given as follows.
Definition 9 Two event structures E1 and E2 are interleaving trace equivalent, in other words, there is an interleaving trace equivalence relation between E1 and E2, notation E1=tiE2, iff TI(E1)=TI(E2).
Definition 10 The distance between interleaving traces δ1 and δ2 is naturally defined as their Baire distance, δti(δ1, δ2)=dB(δ1, δ2).
Proposition 1
∀δj∈TI(Ej), j=1, 2, 3
dti(δ1, δ3)≤max(dti(δ1, δ2), dti(δ2, δ3))
Proof If δ1=δ2 or δ2=δ3, then the right-hand side of the inequality is equal to the left-hand side. Hence the inequality trivially holds.
If δ1=δ3, then the left-hand side of the inequality is equal to 0. Hence the inequality holds.
Otherwise δ1≠δ2, δ2≠δ3 and δ1≠δ3. Let l∈N be the length of the longest common prefix of δ1 and δ2, l'∈N be the length of the longest common prefix of δ2 and δ3. Without loss of generality, assume l≤l', then the length of the longest common prefix of δ1 and δ3 is no less than l.
ti(δ1, δ3)≤2-l=max(2-l, 2-l')=max(dti(δ1, δ2), dti(δ2, δ3))
Hence dti(δ1, δ3)≤max(dti(δ1, δ2), dti(δ2, δ3)) holds in all cases.
The following theorem shows that the definition of dti is reasonable, i.e., the distance is a pseudo-metric.
Theorem 1 dti is a pseudo-metric on the set of interleaving traces.
Proof ∀δj∈TI(Ej), j=1, 2, 3.
1) We prove that dti(δ1, δ2)=0 iff δ1=δ2 (identity of indiscernibles).
dti(δ1, δ2)=dB(δ1, δ2)≥0, dti(δ1, δ1)=dB(δ1, δ1)=0
2) We prove that dti(δ1, δ2)=dti(δ2, δ1) (symmetry).
dti(δ1, δ2)=2-l=dti(δ2, δ1), where l=+∞ or l∈N is the length of the longest common prefix of δ1 and δ2.
3) We prove that dti(δ1, δ3)≤dti(δ1, δ2)+dti(δ2, δ3) (triangular inequality).
dti(δ1, δ3)≤max(dti(δ1, δ2), dti(δ2, δ3))≤dti(δ1, δ2)+dti(δ2, δ3) (Proposition 1)
Furthermore, the pseudo-metric dti on the set of interleaving traces naturally induces an interleaving trace distance between two event structures.
Definition 11 The interleaving trace distance between E1 and E2 is defined as follows:
dti(E1, E2)=dH(TI(E1), TI(E2))
Since Hausdorff distance dH is a pseudo-metric, the definition of dti is reasonable. Event structures together with the interleaving trace distance form a pseudo-metric space.
The intuitive meaning of the interleaving trace distance is as follows. For any interleaving trace of E1 (or E2), we can find an interleaving trace of E2 (or E1) such that the distance between them remains bounded by dti(E1, E2).
For clarity, we omit the configuration inside the circle in the following directed graphs.
Example 4
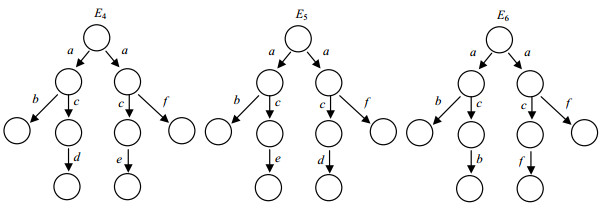
Consider the interleaving views of E4, E5 and E6 in Fig. 4, where the first two directed graphs are taken from counterexample 5 in Ref.[8].

Figure 4. A complex case
TI(E4)=TI(E5)={a, ab, ac, acd, ace, af}
TI(E6)={a, ab, ac, acb, acf, af}
dti(E4, E5)=0 intuitively means that for any execution of E4 (or E5), we can find an execution of E5 (or E4) such that the two executions are indistinguishable to an external observer.
dti(E5, E6)=2-2 intuitively means that for any execution of E5 (or E6), we can find an execution of E6 (or E5) such that from the view of an external observer, the two executions share a common prefix whose length is at least 2, in other words, they are indistinguishable from the first 2 actions.
One of the great advantages of having metric structure on event structures is that the distance enables us to use quantitative approximation.
Definition 12 Two event structures E1 and E2 are approximate interleaving trace equivalent with the precision x≥0, in other words, there is an approximate interleaving trace relation $ \simeq _{ti}^\xi $ between E1 and E2, notation ${E_1} \simeq _{ti}^\xi {E_2}$, iff dti(E1, E2)≤ξ.
It is intuitive that the lower the value of ξ, the higher the degree to which $ \simeq _{ti}^\xi $ is an interleaving trace relation. It should be emphasized that two event structures are approximate interleaving trace equivalent with the precision ξ=0 is also known as they are exact interleaving trace equivalent. In other words, the traditional exact interleaving trace equivalence is a special case of approximate interleaving trace equivalence.
Theorem 2 $ \simeq _{ti}^\xi $(ξ≥0) is an equivalence relation on the set of event structures.
Proof Let E1, E2, E3 be arbitrary event structures.
1) We prove that is a reflexive relation.
dti(E1, E1)=dH(TI(E1), TI(E1))=0≤ξ, hence ${E_1} \simeq _{ti}^\xi {E_1}$
2) We prove that $ \simeq _{ti}^\xi $ is a symmetric relation. dti(E1, E2)=dH(TI(E1), TI(E2))=dH(TI(E2), TI(E1))=dti(E2, E1), hence ${E_1} \simeq _{ti}^\xi {E_2}$ implies that ${E_2} \simeq _{ti}^\xi {E_1}$.
3) We prove that $ \simeq _{ti}^\xi $ is a transitive relation.
Assume ${E_1} \simeq _{ti}^\xi {E_2}$ and ${E_2} \simeq _{ti}^\xi {E_3}$.
ξ≥dti(E1, E2)=dH(TI(E1), TI(E2))=
$$\max \left( {\mathop {\sup }\limits_{{\delta _1} \in {T_I}({E_1})} \mathop {\inf }\limits_{{\delta _2} \in {T_I}({E_2})} {d_{ti}}({\delta _1}, {\delta _2}), \mathop {\sup }\limits_{{\delta _2} \in {T_I}({E_2})} \mathop {\inf }\limits_{{\delta _1} \in {T_I}({E_1})} {d_{ti}}({\delta _1}, {\delta _2})} \right)$$ (1) ξ≥dti(E2, E3)=dH(TI(E2), TI(E3))=
$$\max \left( {\mathop {\sup }\limits_{{\delta _2} \in {T_I}({E_2})} \mathop {\inf }\limits_{{\delta _2} \in {T_I}({E_2})} {d_{ti}}({\delta _2}, {\delta _3}), \mathop {\sup }\limits_{{\delta _3} \in {T_I}({E_3})} \mathop {\inf }\limits_{{\delta _2} \in {T_I}({E_2})} {d_{ti}}({\delta _2}, {\delta _3})} \right)$$ (2) ∀δ1∈TI(E1), by Eq.(1), $\exists $δ2∈TI(E2) such that dti(δ1, δ2)≤ξ. By Eq.(2), $\exists $δ3∈TI(E3) such that dti(δ2, δ3)≤ξ. By Proposition 1, dti(δ1, δ3)≤max(dti(δ1, δ2), dti(δ2, δ3))≤ξ, hence:
$$ \mathop {\inf }\limits_{{\delta _3} \in {T_I}({E_3})} {d_{ti}}({\delta _1}, {\delta _3}) \leqslant \xi $$ Since this formula holds for all δ1∈TI(E1),
$$ \mathop {\sup }\limits_{{\delta _1} \in {T_I}({E_1})} \mathop {\inf }\limits_{{\delta _3} \in {T_I}({E_3})} {d_{ti}}({\delta _1}, {\delta _3}) \leqslant \xi $$ Similarly,
$$ \mathop {\sup }\limits_{{\delta _3} \in {T_I}({E_3})} \mathop {\inf }\limits_{{\delta _1} \in {T_I}({E_1})} {d_{ti}}({\delta _1}, {\delta _3}) \leqslant \xi $$ dti(E1, E3)=dH(TI(E1), TI(E3))
$$ \begin{gathered} \max \left( {\mathop {\sup }\limits_{{\delta _1} \in {T_I}({E_1})} \mathop {\inf }\limits_{{\delta _3} \in {T_I}({E_3})} {d_{ti}}({\delta _1}, {\delta _3}), } \right. \\ \left. {\mathop {\sup }\limits_{{\delta _3} \in {T_I}({E_3})} \mathop {\inf }\limits_{{\delta _1} \in {T_I}({E_1})} {d_{ti}}({\delta _1}, {\delta _3})} \right) \leqslant \xi \\ \end{gathered} $$ Example 5
Consider again the event structures in Example 4. Since dti(E4, E5) < 0.25, ${E_4} \simeq _{ti}^{0.25}{E_5}$ Since dti(E5, E6)=0.25, ${E_5} \simeq _{ti}^{0.25}{E_6}$. By Theorem 2, ${E_4} \simeq _{ti}^{0.25}{E_6}$.
-
The definition of singleton failure pair presented here is that of Ref.[8]. It differs from that of Ref.[13] in one important respect, the refusal set of singleton failure pair must contain one element, instead of at most one element. In our earlier work[14], a revised version of singleton failure pair is proposed to simplify SF equivalence checking. And the RSF algorithm gains in efficiency in terms of speed than the traditional SF algorithm by reducing redundancy elements, while retaining the same information content.
The set of next interleaving actions of a configuration C is defined as follows:
NI(C)={a∈A∪τ| $\exists $C'∈C(E) such that ${\mathop \to \limits^a _I}$ C'}
The set of possible continuations of an interleaving trace δ of E is defined as follows:
CI(E, δ)={a∈A∪τ| $\exists $C, C'∈C(E) such that $\phi {\mathop \to \limits^a _I}$ C, C ${\mathop \to \limits^a _I}$ C'}
|δ| denotes the length of δ. If δ has infinite length, then |δ|=+∞. In order to let interleaving trace and interleaving singleton failure pair have the same form, δ is identified with a pair (δ, e) in this paper.
Definition 13 (δ, π)∈(A∪τ)∞×(A∪τ∪e) is an interleaving RSF pair of E if $\exists $C∈C(E) such that $\phi {\mathop \to \limits^\delta _I}$ C,
$$ \left\{ \begin{gathered} \pi = \varepsilon \wedge {C_I}(E, \delta ) = \phi \hfill \\ \pi = \varepsilon \wedge |\delta | = + \infty \hfill \\ \pi \in {C_I}(E, \delta ) \wedge \pi \notin {N_I}(C) \hfill \\ \end{gathered} \right. $$ Let FI(E) denote the set of all interleaving RSF pairs of E.
The traditional exact interleaving SF equivalence is given as follows.
Definition 14 Two event structures E1 and E2 are interleaving SF equivalent, in other words, there is an interleaving SF equivalence relation between E1 and E2, notation E1=fiE2, iff FI(E1)=FI(E2).
Definition 15 The distance dfi: FI(E1)×FI(E2) →[0, 1] between interleaving RSF pairs (δ1, π1) and (δ2, π2) is defined as follows:
$$ {d_{fi}}(({\delta _1}, {\pi _1}), ({\delta _2}, {\pi _2})) = \left\{ \begin{gathered} 0, \;|{\delta _1} = {\delta _2}\;{\text{and}}\;{\pi _1} = {\pi _2} \hfill \\ {2^{ - L}}, \;|{\delta _1} = {\delta _2}\;{\text{and}}\;{\pi _1} \ne {\pi _2} \hfill \\ {2^{ - l}}, \;|{\text{otherwise}} \hfill \\ \end{gathered} \right. $$ where l is the length of the longest common prefix of δ1 and δ2, L is the maximum length of all interleaving traces of E1 and E2. l=max(|δ1|, |δ2|),
$$ L = \max (\mathop {\max }\limits_{{\delta _1} \in {T_I}({E_1})} |{\delta _1}|, \mathop {\max }\limits_{{\delta _2} \in {T_I}({E_2})} |{\delta _2}|) $$ Hence, the definition insures that if δ1≠δ2, then dfi((δ1, π1), (δ2, π2))=2-l > 2-L=dfi((δ1, π1), (δ2, π1)).
Proposition 2
∀(δj, πj)∈FI(Ej) j=1, 2, 3
dfi((δ1, π1), (δ3, π3))≤
max(dfi((δ1, π1), (δ2, π2)), dfi((δ2, π2), (δ3, π3)))
The proof is omitted since it is similar to the proof of Proposition 1.
Theorem 3 dfi is a pseudo-metric on the set of interleaving RSF pairs.
The proof is omitted since it is similar to the proof of Theorem 1.
Furthermore, the pseudo-metric dfi on the set of interleaving RSF pairs naturally induces an interleaving SF distance between two event structures.
Definition 16 The interleaving SF distance between E1 and E2 is defined as follows:
dfi(E1, E2)=dH(FI(E1), FI(E2))
Since Hausdorff distance dH is a pseudo-metric, the definition of dfi is reasonable. Event structures together with the interleaving SF distance form a pseudo-metric space.
Definition 17 Two event structures E1 and E2 are approximate interleaving SF equivalent with the precision ξ≥0, in other words, there is an approximate interleaving SF relation $ \simeq _{fi}^\xi $ between E1 and E2, notation ${E_1} \simeq _{fi}^\xi {E_2}$, iff dfi(E1, E2)≤ξ.
It is intuitive that the lower the value of ξ, the higher the degree to which $ \simeq _{fi}^\xi $ is an interleaving SF relation. It should be emphasized that two event structures are approximate interleaving SF equivalent with the precision ξ=0 is also known as they are exact interleaving SF equivalent.
Theorem 4 $ \simeq _{fi}^\xi $(ξ≥0) is an equivalence relation on the set of event structures.
The proof is omitted since it is similar to the proof of Theorem 2.
-
In this section, we define approximate trace equivalence and approximate SF equivalence based on step semantics. In the step semantics, an event structure progresses through a sequence of steps (i.e., multi-sets of simultaneously occurring actions). The multi-set is needed, since concurrent events may have the same label.
A multi-set f:A→N is a function, ∀a∈A, f(a) is the multiplicity of a in the multi-set f.
Similarly to finitely branching labelled transition systems, which in each state has only finitely many possible ways to proceed, a multi-set f is finite iff for X={a∈A | f(a)≠ 0}, |X| is finite.
μA denotes the set of all finite multi-sets over A. Since the multi-set of simultaneously occurring actions which are all invisible (called invisible multi-set) is finite, invisible multi-set belongs to μA.
The operations on finite multi-sets are the usual operations on functions.
Definition 18 The equality operator for finite multi-sets is defined as follows:
f, g∈μA, f=g iff ∀a∈A, f(a)=g(a)
An occurrence of a finite multi-set f leads to the state changing from configuration C1 to configuration C2, denoted by C1${\mathop \to \limits^f _S}$C2, iff C1⊂C2 and $\exists $X⊆E such that: X is conflict-free in E; ∀e, e'∈X, e≠e', we have l(e), l(e')∈A implies (e, e')∈~E; X defines a multi-set of actions equal to f, i.e., ∀a∈A, f(a)=|{e∈X| l(e)=a}|; X=C2-C1.
Let ${ \to _S}$ denote the set of all the leading relations. Hence ${ \to _S}$={(C1, f, C2)∈C(E)×μA×C(E)| C1${\mathop \to \limits^f _S}$C2}.
The generalized transition ${\mathop \to \limits^\theta _S}$ for θ∈μA∞ is defined recursively by:
$$ \left\{ \begin{gathered} C{\mathop \to \limits^\varepsilon _S}C \hfill \\ C{\mathop \to \limits^{f\theta } _S}C''\;\;{\text{is}}\;{\text{equal}}\;{\text{to}}\;{\text{by}}\;{\text{definition}}\;C{\mathop \to \limits^f _S}C'{\mathop \to \limits^\theta _S}C''\; \hfill \\ \end{gathered} \right. $$ It is straightforward to show that (C(E), ø, μA, ) forms a labelled transition system.
Definition 19 TS(E)=(C(E), ø, μA, ) is called the step view of E.
Example 6
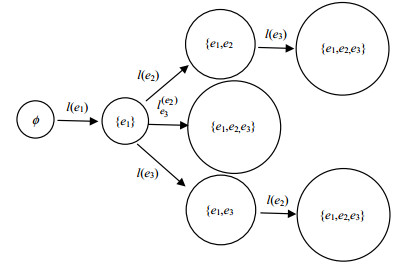
Consider again E3 from Example 2, we denote the step view of E3 by Fig. 5.

Figure 5. The step view of E3
-
θ∈μA∞ is a step trace of E if $\exists $C∈C(E) such that $\phi {\mathop \to \limits^\theta _S}$C. Let TS(E) denote the set of all step traces of E.
Definition 20 Two event structures E1 and E2 are step trace equivalent, in other words, there is a step trace equivalence relation between E1 and E2, notation E1=tsE2, iff TS(E1)=TS(E2).
With the help of the equality operator for finite multi-sets, we can define the distance between two step traces.
Definition 21 The distance between step traces θ1 and θ2 is naturally defined as their Baire distance, dts(θ1, θ2)=dB(θ1, θ2).
Theorem 5 dts is a pseudo-metric on the set of step traces.
Definition 22 The step trace distance between E1 and E2 is defined as follows:
dts(E1, E2)=dH(TS(E1), TS(E2))
Definition 23 Two event structures E1 and E2 are approximate step trace equivalent with the precision ξ≥0, in other words, there is an approximate step trace relation $ \simeq _{ts}^\xi $ between E1 and E2, notation ${E_1} \simeq _{ts}^\xi {E_2}$, iff dts(E1, E2)≤ξ.
Theorem 6 $ \simeq _{ts}^\xi $(ξ≥0) is an equivalence relation on the set of event structures.
-
The set of next step actions of a configuration C is defined as follows:
NS(C)={f∈μA|$\exists $C'∈C(E) such that $C{\mathop \to \limits^f _S}$ C'}
The set of possible continuations of a step trace θ of E is defined as follows:
CS(E, θ)={f∈μA|$\exists $C, C'∈C(E) such that $\phi {\mathop \to \limits^\theta _S}$ C, $C{\mathop \to \limits^f _S}$ C'}
Definition 24 (θ, υ)∈μA∞×μA is a step RSF pair of E if $\exists $C∈C(E) such that ${\mathop \to \limits^\theta _S}$ C,
$$ \left\{ \begin{gathered} \upsilon = \varepsilon \wedge {C_S}(E, \theta ) = \phi \hfill \\ \upsilon = \varepsilon \wedge |\theta | = + \infty \hfill \\ \upsilon \in {C_S}(E, \theta ) \wedge \upsilon \notin {N_S}(C) \hfill \\ \end{gathered} \right. $$ Let FS(E) denote the set of all step RSF pairs of E.
Definition 25 Two event structures E1 and E2 are step SF equivalent, notation E1=fsE2, iff FS(E1)=FS(E2).
Definition 26 The distance dfs:FS(E1)×FS(E2)→ [0, 1] between step RSF pairs (θ1, u1) and (θ2, u2) is defined as follows:
$$ {d_{fs}}({\theta _1}, {\upsilon _1}), ({\theta _2}, {\upsilon _2}) = \left\{ \begin{gathered} 0, |{\theta _1} = {\theta _2}\;{\text{and}}\;{\upsilon _1} = {\upsilon _2} \hfill \\ {{\text{2}}^{ - L}}, |{\theta _1} = {\theta _2}\;{\text{and}}\;{\upsilon _1} \ne {\upsilon _2} \hfill \\ {{\text{2}}^{ - l}}, |{\text{otherwise}} \hfill \\ \end{gathered} \right. $$ where l∈N is the length of the longest common prefix of θ1 and θ2, L is the maximum length of all step traces of E1 and E2.
Theorem 7 dfs is a pseudo-metric on the set of step RSF pairs.
Definition 27 The step SF distance between E1 and E2 is defined as follows:
dfs(E1, E2)=dH(FS(E1), FS(E2))
Definition 28 Two event structures E1 and E2 are approximate step SF equivalent with the precision ξ≥0, in other words, there is an approximate step SF relation $ \simeq _{fs}^\xi $ between E1 and E2, notation ${E_1} \simeq _{fs}^\xi {E_2}$, iff dfs(E1, E2)≤ξ.
Theorem 8 $ \simeq _{fs}^\xi $(ξ≥0) is an equivalence relation on the set of event structures.
-
Our version of Baire metric (Definition 3) is described in Ref.[11], which presented an introduction to metric semantics for programming and specification languages. In this paper, we extend the definition of Baire metric to suit the specific needs of RSF pairs (Definition 15 and Definition 26).
A metric very similar to this definition was defined by Baire[15]. The alternative version of Baire metric was typically used to measure the similarity between strings[16-18], but it does not support Proposition 1 and Proposition 2, which are the essential preconditions for the derivation of the transitive property of approximate equivalences.
In the past several decades, there have been many efforts to develop system approximation. Approximate trace and approximate (bi)simulation relations[19] have been studied for transition systems[20] and hybrid systems[21-22] by Girard and Pappas. Their approximation is based on a metric on the set of observations, which can be any metric. However, none of their approximate relations is an equivalence relation, as they do not satisfy the transitive property. Hence their approximate relations can not be successively used, while our approximate equivalences do not have this limit. For example, ${E_1} \simeq _{ts}^\xi {E_2}, $ ${E_2} \simeq _{ts}^\xi {E_3}, \cdots, {E_{n - 1}} \simeq _{ts}^\xi {E_n}$ imply that ${E_1} \simeq _{ts}^\xi {E_n}$.
-
This paper proposes a generalized framework of event structures approximation by developing the notions of approximate interleaving (trace and SF) equivalence and approximate step (trace and SF) equivalence. Where interleaving and step are two discriminating views of event structures, trace semantics and SF semantics are respectively representatives of linear time semantics and branching time semantics. Note that each of these traditional exact equivalences is a special case of the corresponding approximate equivalence.
The motivation of these approximate equivalences is to define more robust relations between event structures, and to achieve a considerable complexity reduction in the approximation process.
These approximate equivalences are deduced as following. Firstly, we use Baire metric in interleaving so as to give the definition of the distance between interleaving traces (or interleaving RSF pairs). On the other hand, we regard multi-sets as functions, and define an equality operator for finite multi-sets. Therefore, we can use Baire metric in step. Then, we give the definition of the distance between step traces (or step RSF pairs). Secondly, we use Hausdorff distance dH which is defined in Definition 4 to measure set (i.e., the set of all interleaving or step, traces or RSF pairs) distance. In other words, we define four kinds of distances on event structures. Each distance together with the event structures form a pseudo-metric space. Thirdly, these distances enable us to use quantitative approximation. We define that two event structures are approximate equivalent with the precision ξ, iff the distance between them is not greater than ξ.
The main conclusion of this paper is that these approximate equivalences satisfy the transitive property, hence they can be successively used in event structures approximation. That is to say, we can successively use these approximate equivalences to obtain a much more simplified equivalent system than an original complex system. These approximate equivalences guarantee some quality and efficiency in the specification and verification.
In our future work, we plan to develop approximate trace and SF equivalences based on partial orders.
-
摘要: 迹等价和测试等价等事件结构上的系统等价关系都立足于观测集上的精确相等,然而精确相等需要的精确度量在现实物理世界里是无法实现的,因此精确等价的应用是非常有限的,并且精确等价关系不具有鲁棒性。为了克服以上缺陷,该文通过使用Baire度量,提出了包含近似交织迹等价、近似交织单元失败等价、近似步骤迹等价和近似步骤单元失败等价的事件系统近似等价框架。这些近似等价具有以下几种良好性质: 1)近似等价涵盖了精确等价,即传统精确等价是近似等价的特例。2)近似等价关系具有传递性,可以连续使用。
-
关键词:
- approximate equivalence /
- event structures /
- singleton failures /
- step /
- trace
Abstract: Establishing system equivalences for event structures such as trace and testing equivalences, require the observed actions to be exactly identical. However, an accurate measurement is impossible when interacting with the physical world, hence exact equivalence is restrictive and not robust. Using Baire metric, this paper proposes a generalized framework of event structures approximation by developing the notions of approximate interleaving (trace and singleton failures) equivalence and approximate step (trace and singleton failures) equivalence. The proposed framework captures the traditional exact equivalence as a special case. These approximate equivalences satisfy the transitive property, consequently, they can be successively used in event structures approximations.-
Key words:
- approximate equivalence /
- event structures /
- singleton failures /
- step /
- trace
-
[1] NIELSEN M, PLOTKIN G, WINSKEL G. Petri nets, event structures and domains[J]. Semantics of Concurrent Computation, 1979, 70:266-284. doi: 10.1007/BFb0022459 [2] BALDAN P, CRAFA S. A logic for true concurrency[M]//CONCUR 2010-Concurrency Theory. Berlin Heidelberg:Springer, 2010:147-161. [3] GUTIERREZ J, WINSKEL G. On the determinacy of concurrent games on event structures with infinite winning sets[J]. Journal of Computer and System Sciences, 2014, 80(6):1119-1137. doi: 10.1016/j.jcss.2014.04.005 [4] CZAJA I, Van GLABBEEK R J, GOLTZ U. Interleaving semantics and action refinement with atomic choice[M]//ROZENBERG G. Advances in Petri Nets 1992. Berlin Heidelberg:Springer, 1992:89-107. [5] ANDREEVA M V, VIRBITSKAITE I B. Timed equivalences for timed event structures[M]//MALYSHKIN V. maParallel Computing Technologies. Berlin Heidelberg:Springer, 2005:16-26. [6] ACETO L, De NICOLA R, FANTECHI A. Testing equivalences for event structures[J]. Mathematical models for the semantics of parallelism, 1987, 280:1-20. doi: 10.1007/3-540-18419-8 [7] TAUBNER D, VOGLERW. Step failures semantics and a complete proof system[J]. Acta Informatica, 1989, 27(2):125-156. doi: 10.1007/BF00265151 [8] Van GLABBEEK R J. The linear time-branching time spectrum i-the semantics of concrete, sequential processes[M]//BEST E. Handbook of Process Algebra.[S.l.]:Elsevier, 2001:3-99. [9] YING M. Bisimulation indexes and their applications[J]. Theoretical Computer Science, 2002, 275(1):1-68. http://cn.bing.com/academic/profile?id=1980535239&encoded=0&v=paper_preview&mkt=zh-cn [10] WANG Chao, WU Jin-zhao, TAN Hong-yan. Approximate trace and singleton failures equivalences for transition systems[J]. Journal of Systems Engineering and Electronics, 2015, 26(4):886-896. http://cn.bing.com/academic/profile?id=2282822628&encoded=0&v=paper_preview&mkt=zh-cn [11] Van BREUGEL F. An introduction to metric semantics:operational and denotational models for programming and specification languages[J]. Theoretical Computer Science, 2001, 258(1):1-98. http://cn.bing.com/academic/profile?id=1991224384&encoded=0&v=paper_preview&mkt=zh-cn [12] RENSINK A. Denotational, causal, and operational determinism in event structures[M]. Berlin Heidelberg:Springer, 1996. [13] BOLTON C, DAVIES J. A singleton failures semantics for communicating sequential processes[J]. Formal Aspects of Computing, 2006, 18(2):181-210. doi: 10.1007/s00165-005-0081-x [14] WANG Chao, WU Jin-zhao, TAN Hong-yan. Revised singleton failures equivalence for labelled transition systems[J]. Chinese Journal of Electronics, 2015, 24(3):498-501. doi: 10.1049/cje.2015.07.010 [15] BAIRE R. Sur la représentation des fonctions discontinues[J]. Acta mathematica, 1906, 30(1):1-48. doi: 10.1007/BF02418566 [16] CAO Y, YING M. Similarity-based supervisory control of discrete-event systems[J]. IEEE Transactions on Automatic Control, 2006, 51(2):325-330. doi: 10.1109/TAC.2005.863515 [17] CAO Y, CHEN G. Towards approximate equivalences of workflow processes[C]//Proceedings of the 1st International Conference on E-Business Intelligence.[S.l.]:Atlantis Press, 2010. [18] YANG H, JIANG B, COCQUEMPOT V, et al. Fault tolerant control design for hybrid systems[M]. Berlin:Springer, 2010. [19] WANG Chao, WU Jin-zhao, TAN Hong-yan, et al. Approximate reachability and bisimulation equivalences for transition systems[J]. Transactions of Tianjin University, 2016, 22(1):19-23. doi: 10.1007/s12209-016-2565-6 [20] GIRARD A, PAPPAS G J. Approximation metrics for discrete and continuous systems[J]. IEEE Transactions onAutomatic Control, 2007, 52(5):782-798. doi: 10.1109/TAC.2007.895849 [21] GIRARD A, JULIUS A A, PAPPAS G J. Approximate simulation relations for hybrid systems[J]. Discrete Event Dynamic Systems, 2008, 18(2):163-179. doi: 10.1007/s10626-007-0029-9 [22] GIRARD A, PAPPAS G J. Approximate bisimulation:A bridge between computer science and control theory[J]. European Journal of Control, 2011, 17(5):568-578. http://cn.bing.com/academic/profile?id=1997070622&encoded=0&v=paper_preview&mkt=zh-cn -

 点击查看大图
点击查看大图
图(5)
计量
- 文章访问数: 3873
- HTML全文浏览量: 1143
- PDF下载量: 175
- 被引次数: 0
