 ISSN
ISSN 


 下载:
下载:

-
通过表面肌电信号进行人体手部动作的发起检测,是利用肌电信号实时识别手部动作的基础,它实际上可以认为是对肌肉动作(收缩)发起时刻的判断。对于肌肉收缩的准确判断,在模式识别领域有广泛的应用研究价值。在康复医学领域,利用肌电信号帮助残疾人实现运动功能,得到了越来越多研究人员的认可;在虚拟现实领域,通过肌电信号准确反映人体的运动状态,实现自然深度的人机交互。本文的前期工作是在离线模式下,利用自制肌电信号采集与处理实验系统,采用较少的表面肌电电极(两个),对常用手势库中的8种手势动作进行识别,识别率高,适应性强,取得了较好的实验效果[1]。
然而,肌电信号具有微弱性和随机性等显著特点,易受干扰[2],使利用肌电信号进行手部动作发起的精确检测成为一难点问题;另一方面,探索一种高精度的肌电信号检测方法可以准确地判断人体动作对应的始末肌电信号,对于准确识别手部动作具有重要的意义[3]。早期的检测方法一般是由经验丰富的医师进行观察得到,但由于受到检测者主观方面(经验及技术)的影响,个体差异性比较大[4]。因此如何利用肌电信号对手部动作发起实现客观检测,并使之引入对其的在线识别,必须建立一套有效的手部动作发起的检测方法。
前期有学者使用双阈值检测器[5]、小波变换[6-7]、统计判据决策[8]等先进的方法,但以上方法计算量大,亦或是需要不断获取当前肌电信号水平等先验知识建立预先模型。这些方法并不适用于动作发起的实时检测。目前,现有方法都不能较好地达到精确检测的目的,文献[9]利用运动单位动作电位(motor unit action potential, MUAP)在发放时所产生的波峰进行检测,并使用非线性能量算子来突出表面肌电信号的峰值,之后通过阈值的方法进行判断。由于非线性能量算子在算法处理时耗时较长,难以应用于在线判断。而另一些学者便将研究目标放在了与肌电信号有着某种相似之处的语音信号处理上与数字信号处理中,由于具有相似特点,所以可以尝试将较为成熟的语音信号端点检测方法应用于表面肌电信号。文献[10]提出一种基于(hidden markov model, HMM)模型的语音信号端点检测方法,能将语音和噪声的细微差别进行有效的放大,提高语音端点检测准确性,但方法较为复杂,不利于信号的实时处理。而有研究人员将端点检测变换成模式识别以及图像处理的问题来处理。文献[11]使用Bayes最小错误率的方法,将每帧语音进行分类并训练学习,采用最小错误率贝叶斯选出最优门限值,从而提高了检测的精确度。这类算法充分考虑了语言帧之间的联系,这种相关性会使误差的概率最小。文献[12]实现了语音信号的端点检测,利用了图像处理的边缘检测方法,通过改进经典Roberts算子,并设定阈值门限,将检测精度进一步提高。Roberts算子简单直观,有较好的水平与垂直边缘检测效果,且定位精度较好。
本文提出一种通过表面肌电信号进行手部动作发起检测的方法,将TKE算子应用于sEMG信号的预处理,设计二值化状态函数,并针对消除噪声对肌电信号的影响,提出启发式滤波策略。建立手部动作发起的表面肌电仿真模型,通过比对应用几种算子对仿真模型进行发起检测,证明TKE算子方法的有效性。利用肌电信号采集与处理系统进行实验验证,结果表明本文提出的检测方法能够对手部动作发起进行高精度的实时检测。
-
TKE算子应用于音频信号,用于验证语音信号的非线性[13],性能可靠。因其能够刻画肌电信号的非线性方面的特性[14],表征表面肌电信号的幅域及频域的变化程度,所以可利用TKE算子对其进行预处理,将这种幅频变化程度利用TKE算子进行刻画,即将信号变换至TKE域上。在针对降低噪声信号的干扰方面,设计二值化状态函数,最后通过启发式滤波策略,将处理后的表面肌电信号进行滤波,减小尖峰等噪声带来的影响,使其更准确地对手部动作的发起进行判断,最后开展手部动作的发起检测实验验证。
-
对于经过数字采集卡采集到的肌电信号,能够表征为一串离散的数字信号。而对于给定离散信号x(n),TKE算子Ψ可以描述为[15]:
$$ \psi [x(n)] = {x^2}(n) -x(n + 1)x(n -1) $$ (1) 假设一序列表面肌电信号x(n)为零均值基波信号,表示为:
$$ x(n) = A\cos ({\omega _0}n + \theta ) $$ (2) 将式代入式,化简得到:
$$ \psi [x(n)] \approx {A^2}{\sin ^2}{\omega _0} $$ (3) 式(3)表明,在TKE算子计算过程中,输出Ψ[x(n)]与输入信号x(n)的瞬态幅值A及频率ω0密切相关。物理意义上由于肌肉在收缩时,不仅表现在肌电信号幅值的增加,而且其频率也将随之变化。因此对于肌电信号而言,利用TKE算子对其进行预处理,从而实现手部动作的发起检测是合理的。
-
表面肌电信号通过TKE算子预处理后,变换至TKE域上,使其充分表征了肌电信号。而为了克服采集和处理过程中引入尖峰等噪声的影响,精确判断手部动作发起时刻,本文设计了二值化状态函数,为信号的滤波奠定基础。
通过建立一个适当的阈值h,用以评判动作发起与否,有:
$$ h = {\mu _0} + j{\delta _0} $$ (4) 式中,μ0为信号均值;δ0为背景肌电信号的标准差;j为阈值乘子,根据具体试验情况确定,通过试验,确定典型值为5~7。人体当前肌电水平的状态函数为:
$$ s(n) = {\mathop{\rm sgn}} (\psi [x(n)-h]) $$ (5) $${\hat t_0} = \min (n\left| {s(n) = 1} \right.){\rm{ }}n = 1, 2, \cdots, M, \cdots, N $$ (6) 式中,s(n)为手部动作与否的判别序列,是一个二值化状态函数;sgn为符号函数;${\hat t_0}$为持续时间;N, M分别为数据总长和更正后长度。并且定义当s(n)=1表示有动作,当s(n)=1则相反。
识别的具体步骤为:
1) 将待识别信号x(n)实现零均值处理;
2) 使用TKE算子得到Ψ(n);
3) 将平稳肌电信号$\{ \psi (n)\left| {n = 1, 2, \cdots, M} \right.\} $求均值μ0及标准差μ0,确定阈值H;
4) 将$\{ \psi (n)\left| {n = 1, 2, \cdots, M} \right.\} $与阈值h进行判断,得到二值化状态函数s(n),时间段内肌肉收缩的起始点${\hat t_0}$可以确定为s(n)内第一个值为1的点。
${\hat t_0}$为发起时刻。应用TKE算子刻画发起时刻有充分的物理意义,TKE算子实际上表述了当前检测点与其前后信息点的突变程度,当变化超过设定的阈值时,即判断为发起点。本文设计的二值化状态函数将为启发式滤波策略奠定基础,为了最大程度地减少误判,消除尖峰噪声,本文提出启发式滤波策略。
-
动作发起检测是否准确,除了与算法有关,信号本身的质量也很重要,但是由于肌电信号强度微弱、易受外界影响等前述特点,难以得到品质极高的肌电信号。为了消除外界环境噪声对肌电信号发起检测的影响,对于得到的二值化状态函数s(n),需根据人手活动时肌电信号的特点,如收缩的频率、一次性收缩时间等启发信息,建立一种启发式滤波策略。
二值化状态函数s(n)能够表征肌肉的收缩状态,是一串值为“0”,“1”的组合序列。但是由于噪声信号的影响,在肌肉静息状态下,也可有噪声突然的尖峰信号产生。为了最大程度消除这种影响,依据肌肉动作时的固有特性,本文提出启发式滤波策略,用于对s(n)的后处理。其步骤如下:
1) 将得到的一系列s(n)中,序列“1”之间的小于T1的数据全部更改为“1”,以避免在肌肉活动时由于收缩过快等原因偶尔出现的静息状态;
2) 将得到的一系列s(n)中,序列“0”之间的小于T2的数据全部更改为“0”,以消除在正常无动作情况下,肌肉静息时偶尔出现的噪声等尖峰信号带来的影响。T1表示正常的肌肉活动中出现静息状态的时长,T2表示静息状态中超过阈值的尖峰伪活动时长。T1值要在能够区分出活动肌电信号的正常间隔的情况下尽可能小,以排除超前检测误差;T2值则需在不影响检测正常活动持续时间的情况下尽可能大,以排除伪活动噪声。
-
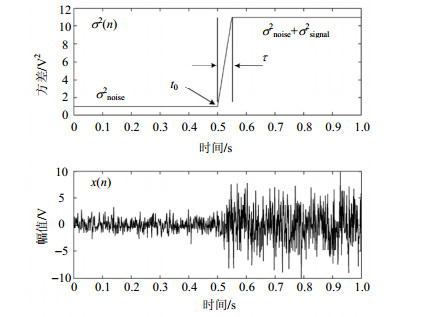
若用真实肌电信号进行测试,人工记录动作的发起时刻,则实验结果准确性不高,且受主观影响。为了对比验证使用TKE算子检测操作者手部行为发起的有效性,对肌电持续时间进行判断,需建立行为发起时刻肌电信号的仿真模型。通过对模型的建立,从而获取准确的行为发起时间,客观上与不同检测方法获取的时间进行对比。本文采用文献[8]提出的方法建立模型,其基本原理是基于肌电信号在活动段与非活动段之间信号方差σ2的差别,在t0处、t长度内形成线性增量。图 1表示了一段持续时间为1 s长度的仿真肌电信号以及其对应的方差变化,这段信号的基本参数信息是:$\sigma _{{\rm{noise}}}^2 = 1$,τ=50 ms,t0=501 ms,SNR=10 dB。

图 1 肌电仿真信号及其方差
其信噪比为:
$${\rm{SNR}} = 10\lg \left( {\frac{{\sigma _{{\rm{signal}}}^2}}{{\sigma _{{\rm{noise}}}^2}}} \right)$$ (7) 以Duchene模型建立了4 000段在不同时刻肌肉收缩的肌电信号,每段信号时长均为1 s,用以模拟人体手部握拳时产生的肌电信号。在产生仿真肌电信号时,其特征参数均有一定范围,发起时刻${t_0} \in [500,600]\;{\rm{ms}}$、收缩时间$\tau \in [5,30]\;{\rm{ms}}$、信噪比${\rm{SNR}} \in [10,20]\;{\rm{dB}}$,参数按照均匀随机分布设定。
-
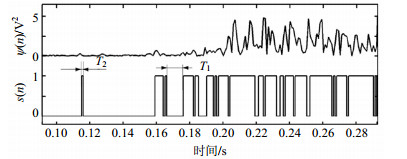
在生成仿真肌电信号的基础上,开展基于TKE算子的手部动作发起检测。通过TKE算子提取信号频率及幅值信息,而后经过二值化状态函数对预处理后的肌电信号进行发起判断,得到二值化状态特征,如图 2所示。

图 2 基于TKE算子的发起检测仿真结果
图 2表明,仿真肌电信号经过TKE算子以及二值化状态函数处理后,可以判断出动作发起的时刻。但由于信号易受噪声影响,偶尔会出现动作发起时刻的误判。本文提出启发式滤波策略,可以大幅减少这种噪声对发起检测带来的影响。
-
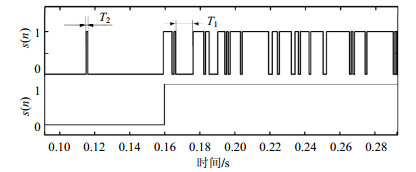
通过引入启发式滤波策略,可以避免动作发起时刻的误判,如图 3所示。

图 3 加入启发式滤波策略后的仿真结果
由仿真实验得到,引入启发式滤波策略能够消除肌电尖峰等噪声的影响,即根据操作者前臂肌肉肌电信号的一些固有特性,如收缩率以及持续长度,有效判断肌肉一次收缩的发起、持续、结束。滤波完成,即可根据s'(n)内“1”所在位置清晰地判断肌肉信号发起的位置${\hat t_0}$、持续时间及结束时间。
-
实验将依据Duchene模型生成4 000段肌肉收缩信号。本文采用TKE算法及其他几种经典算法:1) 标准差STD方法;2) 均值MAV的方法;3) Hodges方法。TKE方法中阈值乘子j=7,STD、MAV与Hodges方法中M=1000,W=20,O=10,h=3。将各个方法得到的${\hat t_0}$与真实t0进行比较,有:
$${t_e} = {\hat t_0} - {t_0}$$ (8) 式中,te为检测时间的误差。对各种方法所得到的te进行概率密度的估计(probability density function, PDF),结果如图 4所示。

图 4 误差检测概率分布结果全景
由图 4可以看出,TKE算法求得的te能够收敛在一个较小区域,而且其峰值更接近中心(峰值对应te≈1.3 ms)。使用STD与MAV方法,峰值远离中心(STD:te≈15.3 ms,MAV:te≈17.1 ms),如此将在真正检测时形成10 ms以上的误差。Hodges方法利用窗口第一数据点,当峰值te≈-3.1 ms,将会产生超前预测误差。
最后引入启发式滤波策略对结果进行优化,采用T1=50 ms,T2=25 ms。结果表明,超前检测方面,TKE方法变得精确,$\min {t_e} >-50{\rm{ ms}} $,而STD、MAV及Hodges方法则变化不大。在检测后误差方面,Hodges有增加的趋势,其他方法基本不变。进一步,讨论4种算法的实现时间,在32位core i5处理器,2 GB内存配置的PC机上,利用matlab中tic和toc命令进行程序运算时间的测算,各种检测方法耗时如表 1所示。
表 1 4种算法运行时间对比
检测方法 TKE Hodges STD MAV 实现时间/s 0.112 0.115 0.095 0.104 表中,4种算法在数量级上几乎没有差别,STD方法计算速度稍快,因为该算法涉及到的只是在时域的处理,MAV方法同Hodges方法的区别仅在于最后的决策阶段,乘子h分别作用于均值(MAV)还是标准差(Hodges),耗时相当,TKE算法步骤较复杂,但运算时间与其他方法差别不大。算法耗时在数量级上相同,几乎不影响,而从误差分布来看,TKE最为准确。为了能更准确地描述行为发起时间,选用TKE算子作为判断的方法。
-
本文的实验是在仿真分析的基础上开展的,因此Duchene模型仿真数据有明确的动作发起点(即有明确物理意义的参数)可供不同检测方法进行评判分析。同时仿真实验中开展了TKE算法与另外3种经典的发起检测方法的对比实验,通过4种检测方法得到的动作发起点与仿真信号中的准确动作发起点进行比较,表明了基于仿真肌电信号的检测实验中,使用该方法进行检测能更有效且准确地判断手部动作的发起。
本文利用受试者手部握拳动作,体现在前臂的表面肌电信号开展实验,为真实肌电信号。由于实验中动作发起时刻迅速而短暂,加之通过仿真分析得知每种方法的检测实践差别在毫秒数量级,实际数据中难以区分发起时刻的优劣。鉴于仿真信号的一系列测试中,已经通过相关理论验证了TKE算法在检测手部动作发起时的整体优越性。本文直接利用TKE算法进行判断,目的是进一步验证理论方法在实际应用中的效果。
为了开展相关实验验证,本文建立肌电信号采集处理系统,运用本文的检测方法对手部动作发起时刻进行判断,从而进一步验证该方法的有效性。
-
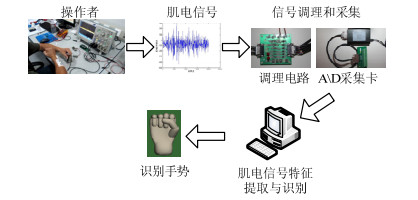
实验系统主要由表面肌电电极、自制信号调理电路、阿尔泰USB2811数据采集卡和PC机组成,如图 5所示。采集方法以及调理电路的各项参数,详见文献[1]的实验部分。

图 5 实验系统组成
共有4名受试者(2男2女,年龄24~26岁,均无前臂肌肉神经病史)进行实验,需熟悉实验设备、实验流程,而后参与基于肌电信号的手部动作发起时刻检测实验。
-
实验部分共分为两组进行:
1) 第一组将开展共20段肌电信号(4名受试者,每名受试者采集5组信号)的采集,应用本文的方法,讨论在实际肌电信号应用中的有效性,并给出了方法的计算精度;
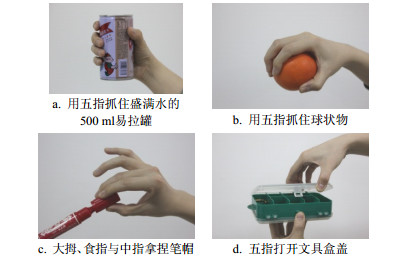
2) 第二组实验将针对一名受试者,利用TKE算法同文章中提到的其他3种常用算法,开展4种基本动作的发起判断,通过超前及滞后检测误差对比各方法之间的优劣。第二组实验中检测的4种基本动作,如图 6所示。

图 6 4种手部基本动作
第一组实验考察手部动作为展握拳时检测的精度。受试者手部进行展拳与握拳动作,利用肌电电极采集受试者前臂指伸肌(extensor digitorum)在展握拳时的肌电信号,并作记录分析。该组实验结果表明,本文的方法能准确地判断手部动作由静息状态(展拳)向发起状态(握拳)的转变,即对动作的发起时刻能够进行高精度的实时检测。
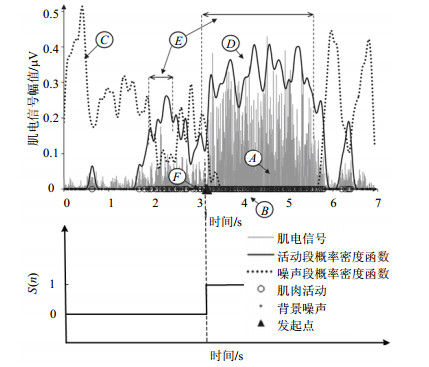
由图 7归一化后的结果可以得到,在利用TKE算子对人体手部展握拳动作的发起进行判断时,肌电信号可以被准确检测。图中,A区域为肌电信号的绝对值,B为一序列信号,其中“十字”表示背景噪声,圆圈表示肌肉正常活动引起的信号,C和D分别代表噪声与肌电信号的概率密度函数,E代表动作的潜在活动区域,F点则表示动作的发起点。

图 7 基于TKE算子的展握拳发起检测结果
讨论TKE算法的计算精度,一般认为基于肌电信号进行动作发起点的判断,需要具备以下条件:
$$ \left\{ {\begin{array}{*{20}{l}} {{X_{j + 1}}- {X_j} > \Delta x{\rm{ }} \Delta x > 0}\\ {{X_{j + 2}}- {X_j} > \Delta x}\\ \begin{array}{l} {X_{j + 3}}- {X_j} > \Delta x\\ {X_j} = \frac{1}{{30}}\sum\limits_{i = 1}^{30} {\left| {{x_{30j + i}}} \right|} \end{array}\\ {{X_j} \in [M, N]{\rm{ }} M > N > 0} \end{array}} \right. $$ (9) 式中,S表示受试者采集点指伸肌上的一系列表面肌电信号;xi表示第i个肌电信号值,动作发生的阈值区间为[M, N]。根据式(9)得到以下有用信息,若一个均值点比它后面的3个均值点都小,且该点处于设定的阈值区间[M, N]中,可以判断该点为动作发生点;在动作发生阈值点后比阈值点大Δx的点,可以判断为有效肌电信号发生点。用得到的该点与TKE算子进行比较,可以判断出本文的TKE算子的方法精度。将4名受试者的20段肌电信号利用TKE算子进行发起检测,与一般认为的动作发起点进行比较,得到两者的最大差值为286 ms,最小为56 ms,平均精度误差仅有102 ms,远小于300 ms,这是利用肌电信号实时判断手部动作所花费时间的极限。
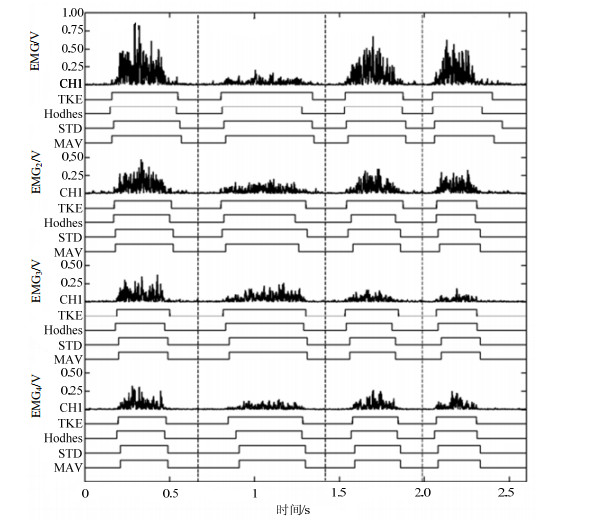
第二组实验进行4组手部基本动作的发起检测。采集4路肌电信号,采用本文的TKE算法以及其他3种常用方法(MAV方法、STD方法及Hodges方法),检测受试者手部动作发起。一名受试者完成4种基本动作,如图 6所示,采集其4路肌电信号EMG (n),一共得到16段肌电信号。图 8中,共采集了4路信号,每路信号的第一行为原始肌电信号绝对值,每一路信号下方的4行0、1信号函数是应用4种方法检测到动作的时间序列。1代表动作时刻,0代表静息时刻。在这一共16段数据中,4种算法均能检测到手部动作,但由于TKE方法对于肌电信号的幅值变化感知更明显,加之后处理参数选择得当,因此可以更准确地判断4种基本动作在各通道肌电信号的发起段。

图 8 4种算法对手部动作发起的判断结果
实验中,若要尖峰噪声的影响得到有效的剔除,则在后处理过程中,必须对每一个s(n)=0的间隔做出统计,对于普通手势发起时T1通常在30 ms以下(此时置信度为98%)。
考虑到MAV方法需要应用移动窗口策略,由于尖峰噪声不敏感,T1在适当范围能取值较大,以便于将正常手部动作内s(n)=1的耦合连接。与本文的仿真肌电信号实验结果相似,使用Hodges方法生成的超前检测误差(te < 0)偏大,使用MAV及STD方法生成的滞后检测误差(te > 0)偏大。实验结果表明,相较于TKE算子方法,其他3种方法对于肌肉活动及手部动作的检测均不理想。
另外,在第二组实验中,将所有检测间隔设置在3 s内,发起检测时间的最小值定义为肌肉收缩发起时间。而对于发起时刻,某一通道的检测时间严重超前于其他检测通道(>100 ms),则将此次检测定义为错误检测,并将其剔除。经过统计,发生错误检测的概率约为1%,即可认为实验中检测成功率为99%。
综上所述,通过本文的两组实验说明了肌电信号对于判断手部动作的可行性,并计算出方法的精度。因为表面肌电信号是人体肌肉在运动时所产生的电信号,其微弱性的特点导致必须使用专用的采集设备对表面肌电信号进行采集。本质上,人的大脑神经中枢信息通过神经传导,将微弱的电信号通过轴突层层传递,引起肌肉的收缩,最终致使人体运动器官的展开活动。而这种微弱电信号的变化,在生物表现中确实反映了手部动作的改变。而人手从静息状态到运动状态,肌电信号的变化最能进行表征此状态的转变。这种状态的准确判断,将成为后续信号处理与识别的关键性信息。
-
本文提出了一种通过表面肌电信号进行手部动作发起检测的方法,该方法首次将TKE算子应用于sEMG信号的预处理,设计二值化状态函数,并提出启发式滤波策略,最后进行了仿真及实验研究。结果表明利用该方法,可以对手部动作发起的肌电信号进行高精度的实时检测。通过本文的研究,阐明了肌电信号与手部动作的内在联系,更精确地确定手部动作发起时刻,有效地建立起肌电信号与行为动作间的对应关系,为开展手势的实时识别研究提供了一种新的思路,奠定了重要的基础。
A Method for Hand Movement Onset Detection from Surface EMG Signals
-
摘要: 实时且准确地识别手部动作,是表面肌电信号应用的重要方面,而通过其进行手部动作的发起检测是一个技术难点。为了解决这一问题,该文提出一种通过表面肌电信号进行手部动作发起检测的方法,将TKE算子应用于sEMG信号的预处理,通过设计二值化状态函数,并针对消除噪声对肌电信号的影响,提出启发式滤波策略。建立手部动作发起的表面肌电仿真模型,通过比对应用几种算子对仿真模型进行发起检测,证明TKE算子方法的有效性。利用肌电信号采集与处理系统进行实验验证。结果表明,该检测方法能够对手部动作发起进行高精度的实时检测。Abstract: Recognizing hand movements by using surface electromyography (sEMG) signal in real time and accurately is an important aspect of the application of sEMG signal. Hand movements onset detection from sEMG signals is the precondition of real-time hand movements recognizing. In this paper, The study aims at detecting the hand movement onset based on the consecutive sEMG signal. The sEMG signal is preprocessed by using the teager-kaiser energy (TKE) operator and a sEMG signal state binary function is designed to detect the hand movement onset from the consecutive sEMG signal. Then we design a heuristic filter according to the actual sEMG signal character. The detected results are filtered further by the heuristic filter which can cancel the effects of noise. We compare the application several methods for the simulation model. It proves the validity of TKE operator method. In the end, using sEMG signal acquisition and processing system for experimental verification, the results show that the detection method can rival action initiated for high precision of real-time detection.
-
Key words:
- hand movement /
- onset detection /
- surface electromyography /
- TEK operator
-
[1] 赵漫丹, 李东旭, 范才智, 等.基于肌电信号层级分类的手部动作识别方法[J].北京生物医学工程, 2014, 33(5):490-496. http://www.cnki.com.cn/Article/CJFDTOTAL-BJSC201405010.htm ZHAO Man-dan, LI Dong-xun, FAN Cai-zhi, et al. A method of hand movement pattern recognition based on sEMG hierarchical classification[J]. Beijing Biomedical Engineering, 2014, 33(5):490-496. http://www.cnki.com.cn/Article/CJFDTOTAL-BJSC201405010.htm [2] 谢燕江, 杨智, 范正平, 等.应用小波变换去除膈肌肌电图信号中的心电干扰[J].电子学报, 2010, 38(2):366-370. http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201002018.htm XIE Yan-jiang, YANG Zhi, FAN Zheng-ping, et al. Application of wavelet to the cancellation of ECG interference in diaphragmatic EMG[J]. Acta Electronica Sinica, 2010, 38(2):366-370. http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201002018.htm [3] MAHDI K, MEHRAN J. A neuro-fuzzy inference system for sEMG-based identification of hand motion commands[J]. IEEE Transactions on Industrial Electronics, 2011, 58(5):1952-1960. doi: 10.1109/TIE.2010.2053334 [4] DIFABIO R P. Reliability of computerised surface electromyography for determining the onset of muscle activity[J]. Phys Ther, 1987, 67:43-48. https://www.researchgate.net/publication/19363413_Reliability_of_computerized_surface_electromyography_for_determining_the_onset_of_muscle_activity [5] BONATO P, ALESSIO T D. A statistical method for the measurement of muscle activation intervals from surface myoelectric signal during gait[J]. IEEE Transactions on Biomedical Engineering, 1998, 45:287-298. doi: 10.1109/10.661154 [6] MERLO A, FARINA D, MERLETTI R. A fast and reliable technique for muscle activity detection from surface EMG signals[J]. IEEE TRansactions on Biomedical Engineering, 2003, 50:316-323. doi: 10.1109/TBME.2003.808829 [7] 李仲宁, 罗志增.基于小波变换的空域相关法在肌电信号中的应用[J].电子学报, 2007, 35(7):1414-1418. http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU200707036.htm LI Zhong-ning, LUO Zhi-zeng. Spatial correlation filtering based on wavelet transfomation application to EMG De-noising[J]. Acta Electronica Sinica, 2007, 35(7):1414-1418. http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU200707036.htm [8] STAUDE G H. Precise onset detection of human motor responses using a whitening filter and the log-likelihood-ratio test[J]. IEEE Transactions on Biomedical Engineering, 2001, 48:1292-1305. doi: 10.1109/10.959325 [9] 杨文元, 尤波, 黄玲, 等.表面肌电信号的分解算法研究[J].计算机应用与软件, 2015, 32(6):245-248. http://www.cnki.com.cn/Article/CJFDTOTAL-JYRJ201506061.htm YANG Wen-yuan, YOU Bo, HUANG Ling, et al. Research on decomposition algorithm of surface electromyography[J]. Computer Applications and Software, 2015, 32(6):245-248. http://www.cnki.com.cn/Article/CJFDTOTAL-JYRJ201506061.htm [10] 罗冰.基于HMM的噪声语音端点检测方法研究[D].成都:西华大学, 2012. http://cdmd.cnki.com.cn/Article/CDMD-10623-1012507527.htm LUO Bing. A new method based on HMMs for noise-robust voice activity detector[D]. Chengdu:Xihua University, 2012. http://cdmd.cnki.com.cn/Article/CDMD-10623-1012507527.htm [11] PAWATE B I, DOWLING E. A new method for segmenting continuous speech[C]//IEEE International Conference on Acoustics Speech and Signal Processing.[S.l.]:IEEE, 1994:53-56 [12] GHAEMMAGHAMI H, VOGT R, SRIDHARAN S, et al. Speech endpoint detection using gradient based edge detection techniques[C]//2nd International Conference on Signal Processing and Communication Systems.[S.l.]:ICSPCS, 2008. [13] TEAGER H M, TEAGER S M. Evidence for nonlinear sound reduction mechanisms in the vocal tract[J]. Kluwer Acad Publ, 1990:241-261. [14] 张启忠, 席旭刚, 罗志增.基于非线性特征的表面肌电信号模式识别方法[J].电子与信息学报, 2013, 35(9):2054-2058. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201309004.htm ZHANG Qi-zhong, XI Xu-gang, LUO Zhi-zeng. A pattern recognition method for surface electromyography based on nonlinear features[J]. Journal of Electronics & Information Technology, 2013, 35(9):2054-2058. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201309004.htm [15] LI X, ZHOU P, ARUIN A S. Teager-Kaiser energy operation of surface EMG improves muscle activity onset detection[J]. Annals of Biomedical Engineering, 2007, 35(9):1532-1538. doi: 10.1007/s10439-007-9320-z -

 点击查看大图
点击查看大图
图(8) / 表(1)
计量
- 文章访问数: 3996
- HTML全文浏览量: 1317
- PDF下载量: 217
- 被引次数: 0
