 ISSN
ISSN 



-
机载地物杂波呈现的空时二维耦合谱特性决定其采用空时自适应处理技术(space-time adaptive processing, STAP)的杂波抑制效果要好于一维杂波抑制技术[1]。全维STAP方法性能虽然能达到最优,但阵面偏航角、地表类型、植被覆盖等因素使得雷达面临的杂波环境是非均匀的[2],无法满足自适应处理对于均匀样本数的巨大需求,为此,科研人员提出了降维[3-4]及降秩[5-6]算法。降维算法通过使用与样本数据无关的线性变换来降低系统自由度,从而减少均匀样本数,但无论哪种降维算法都不可避免地存在系统自由度的缺失,因此会带来一定程度的杂波抑制性能下降[7];相比于降维算法,降秩算法用与样本数据相关的变换构造滤波器,因而能获得比降维算法更优良的性能。大多数降秩算法利用杂波的低秩特性构造杂波子空间,将均匀样本数需求由2倍系统维数降到2倍杂波秩。其中主分量法(principal component, PC)[5]及特征相消法(eigencanceller, EC)[6]是较为常见的两种降秩算法。PC法和EC法本质类似,但其存在两个主要问题:一是在杂波子空间的构造过程中需要特征分解,产生了较大的计算量;二是非均匀环境下空时相关矩阵的秩不能精确估计,为保证杂波抑制性能,会适当增加均匀样本数,然而非均匀杂波环境并不一定能够满足这一需求。
近年来,科研人员发现在雷达信号处理过程中,结合与雷达参数及探测环境相关的先验知识可以显著提高雷达整体性能[8-10],文献[10]利用杂波在空时二维平面上具有特定分布等先验知识提出了一种基于杂波子空间的降秩方法,虽然其仅适用于正侧视理想情况,但计算量小、样本需求少的特点说明利用先验知识可以改善STAP的杂波抑制性能。为此,本文利用扁平椭球波函数(prolate spheroidal wave functions, PSWF)[11-12]的时限带限特性,结合雷达参数及探测环境的几何构型等先验知识,推导出一种新的基于杂波子空间的降秩方法,该方法构造过程简单,可以提前离线构造,有效降低了处理器的计算量与均匀样本数需求;并针对存在阵面偏航角误差时杂波秩无法准确估计造成PSWF方法杂波抑制性能下降的问题,结合雷达参数信息及探测环境几何构型提出一种杂波预处理方法以消除偏航角的影响,从而提升其非均匀环境下的杂波抑制性能。最后,通过仿真实验验证了本文算法的有效性。
-
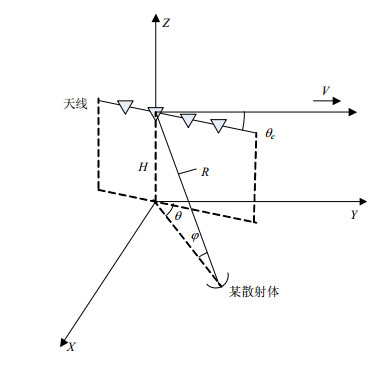
机载相控阵雷达的阵面与杂波几何关系如图 1所示。不失一般性,假设载机沿平行于Y轴正向的水平方向飞行,飞行高度为H,速度为V;天线采用N元等距线阵,阵元间距为d,阵面偏航角为θc。雷达以恒定的脉冲重复频率fr发射K个相干脉冲,发射波长为λ。不考虑距离模糊及一个相干处理间隔内雷达平台运动,则接收信号经过解调和匹配滤波之后,依据Wald杂波模型[1],俯仰角为φ的某一距离单元上第n个阵元第k个脉冲的输出为:
$$ {x_{nk}}(\varphi ) = \sum\limits_{i = 1}^{{N_C}} {\alpha ({\theta _i})\exp \{ {\rm{j}}2{\rm{\pi }}((n-1){{\bar f}_{s, i}} + (k-1){{\bar f}_{d, i}})\} } + {w_{nk}} $$ (1) 
图 1 机载相控阵雷达阵面与杂波几何关系图
式中,Nc为散射体个数;α(θi)和θi分别为第i个散射体对应的复幅度及方位角;wnk为单位脉冲单位阵元上的接收机噪声,$ n = 1, 2, \cdots, N $,$ k = 1, 2, \cdots, K$;$ {{\bar f}_{s, i}} = d\cos {\theta _i}\cos \varphi /\lambda $为第i个散射体对应的归一化空域频率;$ {{\bar f}_{d, i}} = 2V\cos ({\theta _i} + {\theta _c})\cos \varphi /\lambda {f_r} $为第i个散射体对应的归一化多普勒频率。假设各散射体之间互不相关,杂波与噪声互不相关,则该距离单元的空时相关矩阵可以表示为:
$$ \mathit{\boldsymbol{R}} = {\mathit{\boldsymbol{x}}_{nk}}\mathit{\boldsymbol{x}}_{nk}^{\rm{H}} = {\mathit{\boldsymbol{R}}_c} + {\mathit{\boldsymbol{R}}_n} = {\mathit{\boldsymbol{R}}_c} + {\sigma ^2}\mathit{\boldsymbol{I}} $$ (2) 式中,(·)H表示共轭转置;Rc为杂波协方差矩阵;Rn为噪声协方差矩阵;σ2为单位阵元单位脉冲的噪声功率;I为单位矩阵。依据线性约束最小方差准则[1]可求出最优权值:
$$ \mathit{\boldsymbol{W}} = \frac{{{\mathit{\boldsymbol{R}}^{-1}}{\mathit{\boldsymbol{S}}_0}}}{{\mathit{\boldsymbol{S}}_0^{\rm{H}}{\mathit{\boldsymbol{R}}^{-1}}{\mathit{\boldsymbol{S}}_0}}} = \mu {\mathit{\boldsymbol{R}}^{-1}}{\mathit{\boldsymbol{S}}_0} $$ (3) 式中,S0为目标对应的空时导向矢量。
-
当θc=0°时,式(1)可以表示为:
$$ \begin{array}{l} {x_{nk}}(\varphi ) = \sum\limits_{i = 1}^{{N_c}} {\alpha ({\theta _i}){{\rm{e}}^{\{ {\rm{j}}2{\rm{\pi }}[(n-1) + \beta (k-1)]{{\bar f}_{s, i}}\} }}} + {w_{nk}} = \\ \sum\limits_{i = 1}^{{N_c}} {\alpha ({\theta _i})} {c_i} + {w_{nk}} \end{array} $$ (4) 式中,$ \beta = 2V/d{f_r} $。显然函数ci是一个时限带限函数,其时域范围为:$ 0 \le T \le N-1 + \beta (K-1) $,频域范围为:$ -{\bar f_{s, i}} \le W \le {\bar f_{s, i}} $。由PSWF函数集的时限带限及时域频域双正交特性可知PSWF函数集可作为时限带限空间上的一组完备正交基[13]。由离散卡洛变换,ci可用有限个PSWF函数的线性组合表示:
$$ {\mathit{\boldsymbol{c}}_\mathit{\boldsymbol{i}}} = \sum\limits_{k = 1}^r {{\gamma _k}{\phi _k}((n-1) + \beta (k-1))} = \sum\limits_{k = 1}^r {{\gamma _k}{\mathit{\boldsymbol{u}}_k}} $$ (5) 式中,$ {\gamma _k} = \int_0^T {{c_i}\phi _k^*} $,(·)*表示共轭运算,ϕk为第k阶PSWF函数;$ r = \left\lceil {N + \beta (K-1)} \right\rceil $为杂波秩,$ \left\lceil \cdot \right\rceil $表示向上取整。其中$ r = \left\lceil {N + \beta (K-1)} \right\rceil $是因为前r阶PSWF函数最大程度的集中了能量[14]。将式(5)代入式(4)中可以得到:
$$ {\mathit{\boldsymbol{x}}_{nk}}(\varphi ) = \sum\limits_{i = 1}^{{N_c}} {\sum\limits_{k = 1}^r {\alpha ({\theta _i})} } {\gamma _k}{\mathit{\boldsymbol{u}}_k} + {w_{nk}} $$ (6) 显然,当前距离单元回波的空时相关矩阵为:
$$ \begin{array}{c} \mathit{\boldsymbol{R}} = {\mathit{\boldsymbol{x}}_{nk}}\mathit{\boldsymbol{x}}_{nk}^{\rm{H}} = \sum\limits_{i = 1}^{{N_c}} {\alpha ({\theta _i}){\alpha ^*}({\theta _i})} {\mathit{\boldsymbol{c}}_i}\mathit{\boldsymbol{c}}_i^{\rm{H}} = \\ \sum\limits_{i = 1}^{{N_c}} {\alpha ({\theta _i})\sum\limits_{k = 1}^r {\sum\limits_{t = 1}^r {{\gamma _k}\gamma _k^*{\mathit{\boldsymbol{u}}_k}\mathit{\boldsymbol{u}}_t^{\rm{H}} + {\sigma ^2}\mathit{\boldsymbol{I}}} } } = \\ \mathit{\boldsymbol{U\Lambda }}{\mathit{\boldsymbol{U}}^{\rm{H}}} + {\sigma ^2}\mathit{\boldsymbol{I}} \end{array} $$ (7) 式中,。
由式(2)及式(7)有:
$$ {\rm{Span}}({\mathit{\boldsymbol{R}}_c}) \approx {\rm{Span}}(\mathit{\boldsymbol{U}}) $$ (8) 故新构造的杂波子空间与原始杂波子空间同属一个子空间。
由式(7)可得到:
$$ \mathit{\boldsymbol{\Lambda }} = {({\mathit{\boldsymbol{U}}^{\rm{H}}}\mathit{\boldsymbol{U}})^{-1}}{\mathit{\boldsymbol{U}}^H}(\mathit{\boldsymbol{R}}-{\sigma ^2}\mathit{\boldsymbol{I}})\mathit{\boldsymbol{U}}{({\mathit{\boldsymbol{U}}^{\rm{H}}}\mathit{\boldsymbol{U}})^{-1}} $$ (9) 则Λ可由下式估计得到:
$$ \mathit{\boldsymbol{\hat \Lambda }} = \frac{1}{L}\sum\limits_{i = 1}^L {{\mathit{\boldsymbol{x}}_l}\mathit{\boldsymbol{x}}_l^{\rm{H}}}-{\sigma ^2}{({\mathit{\boldsymbol{U}}^{\rm{H}}}\mathit{\boldsymbol{U}})^{-1}} $$ (10) 式中,xl表示第l个距离门的样本;L为样本数。
由式(7)及矩阵求逆公式可近似得到空时相关矩阵的逆矩阵为:
$$ \mathit{\boldsymbol{R}}_{{\rm{pswf}}}^{-1} \approx \frac{1}{{{\sigma ^2}}}\mathit{\boldsymbol{I}}-\frac{1}{{{\sigma ^4}}}\mathit{\boldsymbol{U}}{({\mathit{\boldsymbol{\Lambda }}^{-1}} + \frac{1}{{{\sigma ^2}}}{\mathit{\boldsymbol{U}}^{\rm{H}}}\mathit{\boldsymbol{U}})^{ - 1}}{\mathit{\boldsymbol{U}}^{\rm{H}}} $$ (11) 由式(3)、式(10)及式(11)即可求得滤波器权值。
通常情况下,雷达回波的杂噪比很大,即空时相关矩阵对应的大特征值较大,因此,Λ-1≈0,代入式(11)中可直接得到空时相关矩阵的近似形式:
$$ \mathit{\boldsymbol{R}}_{{\rm{pswf}}}^{- 1} \approx \frac{1}{{{\sigma ^2}}}[\mathit{\boldsymbol{I}}-\mathit{\boldsymbol{U}}{({\mathit{\boldsymbol{U}}^{\rm{H}}}\mathit{\boldsymbol{U}})^{-1}}{\mathit{\boldsymbol{U}}^{\rm{H}}}] $$ (12) 将式(12)代入式(3)可求得此时的滤波器权值。
由式(4)~式(8)可知,PSWF函数构造杂波子空间方法主要依据杂波空时导向矢量函数的时限带限特性,构造过程中涉及了雷达阵元数、阵元间距、载机速度、发射脉冲数、脉冲重复频率、发射波长等参数,而这些参数可依据雷达系统参数及探测环境几何构型等先验知识提前获取,因此,PSWF方法可以提前离线构造,有效地降低了计算量。表 1分别给出了SMI、PC/EC及PSWF3种方法的计算复杂度,其中L表示SMI的样本数,D表示PC/EC的样本数。
表 1 计算复杂度
算法 估计空时相关矩阵 计算权值 SMI $ O(L{(NK)^2}) $ $ O({(NK)^3}) $ PC/EC $ O(D{(NK)^2} + O({(NK)^2})) $ $ O({(NK)^3}) $ PSWF 提前离线构造 $ O((NK)) $ 由表 1可知SMI及PC/EC方法的计算量要远大于PSWF,这是因为在估计空时相关矩阵的过程中PSWF可以提前离线构造,因此并不占用实际信号处理时间,而SMI需要大量样本估计,PC/EC需进行特征值分解;计算权值时,SMI与PC/EC都需要对协方差矩阵进行求逆运算,而PSWF提前离线构造出空时相关矩阵的逆矩阵,并不需要对空时相关矩阵求逆,因此计算量大大降低。
然而,阵面存在偏航角误差时,式(1)与式(4)并不等价,杂波秩无法准确估计,此时PSWF方法的杂波抑制性能必然下降,为此,提出一种利用雷达参数信息的预处理方法以消除偏航角误差的影响。
-
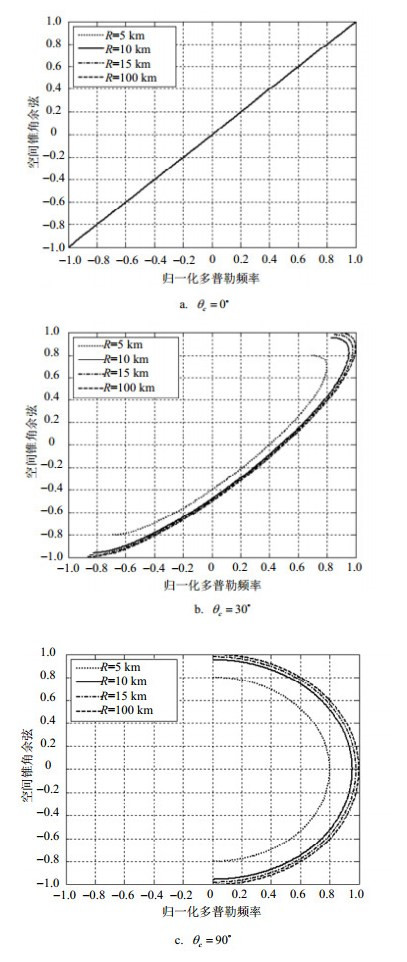
如图 1,位于(θ, φ)的散射体,其归一化多普勒频率$ {\bar f_d} $与空间锥角余弦$ \cos \psi $之间存在如下关系:
$$ \begin{array}{c} {\left( {\frac{{{{\bar f}_d}}}{{{{\bar f}_{dM}}}}} \right)^2}-\left( {\frac{{2{{\bar f}_d}}}{{{{\bar f}_{dM}}}}} \right)\cos \psi \cos {\theta _c} + \\ {\cos ^2}\psi = {\sin ^2}{\theta _c}{\cos ^2}\varphi \end{array} $$ (13) 式中,$ {{\bar f}_{dM}} = 2V/\lambda {f_r} $。
由式(13)可知,随着偏航角θc的变化,杂波的空时二维谱在$ {{\bar f}_d} \sim \cos \psi $平面上呈现不同的形状。图 2a、2b及2c分别给出了不同偏航角,飞行高度为3km时,不同斜距对应的空时二维杂波谱分布。显然,当θc=0°,即不存在偏航角时,杂波的空时二维谱在$ {{\bar f}_d} \sim \cos \psi $平面上为一条斜率为$ \lambda /4V $的斜带,此时各训练样本的杂波统计特性相同,杂波均匀,且$ {\bar f_d} = \beta {\bar f_s} $;当0° < θc < 90°时,杂波谱为一簇斜椭圆,当θc=90°时,杂波谱为一簇正椭圆,即存在偏航角时,各训练样本的杂波统计特性不同,杂波非均匀,且$ {\bar f_d} \ne \beta {\bar f_s} $,式(1)与式(4)不再等价,Brennan准则[1]并不适用,因此无法得到准确的杂波秩,诸如PSWF等子空间类方法不再有效,其杂波抑制性能必然下降,为此,本文提出一种利用雷达参数信息的预处理方法以消除偏航角的影响。

图 2 机载阵列雷达杂波空时二维谱分布示意图
由式(1)知,位于(φ,θ)的某一散射体,第n个阵元第k个脉冲的输出杂波可以表示为:
$$ \begin{array}{c} \mathit{\boldsymbol{x}}_{nk}^C(\theta, \varphi ) = \\ \alpha (\theta ){{\rm{e}}^{\{ {\rm{j}}\frac{{2{\rm{\pi }}d}}{\lambda }([(n-1) + \beta (k-1)\cos {\theta _c}-\beta (k - 1)\sin {\theta _c}]\left[{\begin{array}{*{20}{c}} {\cos \theta \cos \varphi }\\ {\sin \theta \cos \varphi } \end{array}} \right])\} }} \end{array} $$ (14) θc=0°时,由式(14),有:
$$ \mathit{\boldsymbol{\hat x}}_{nk}^C(\theta, \varphi ) = \alpha (\theta ){{\rm{e}}^{\{ {\rm{j}}\frac{{2{\rm{\pi }}d}}{\lambda }([\begin{array}{*{20}{c}} {(n-1) + \beta (k-1)}&0 \end{array}]\left[{\begin{array}{*{20}{c}} {\cos \theta \cos \varphi }\\ {\sin \theta \cos \varphi } \end{array}} \right])\} }} $$ (15) 显然,若存在预处理因子$ \mathit{\boldsymbol{\Delta }}(\theta, \varphi ) $,使其满足$ x_{nk}^C(\theta, \varphi )\mathit{\boldsymbol{\Delta }}(\theta, \varphi ) = \hat x_{nk}^C(\theta, \varphi ) $,则$ \mathit{\boldsymbol{\Delta }}(\theta, \varphi ) $可以消除偏航角的影响。由式(14)及式(15)可以得到:
$$ \mathit{\boldsymbol{\Delta }}(\theta, \varphi ) = {{\rm{e}}^{\{ {\rm{j}}\frac{{2{\rm{\pi }}d}}{\lambda }([(\beta (k-1)(1-\cos {\theta _c})\beta (k-1)\sin {\theta _c}]\left[{\begin{array}{*{20}{c}} {\cos \theta \cos \varphi }\\ {\sin \theta \cos \varphi } \end{array}} \right])\} }} $$ (16) 式(16)中的$ \mathit{\boldsymbol{\Delta }}(\theta, \varphi ) $涉及了阵元间距、发射脉冲数、发射波长、载机速度、脉冲重复频率、阵面偏航角、散射体俯仰角及方位角等参数,这些参数可依据雷达参数及探测环境几何构型等先验知识提前获取,因此可以提前离线构造,有效地降低了计算量。而散射体对应的幅度,可通过以下方法估计。
式(1)可表示为如下矩阵形式:
$$ {\mathit{\boldsymbol{x}}_{nk}}(\varphi ) = \sum\limits_{i = 1}^{{N_c}} {\alpha ({\theta _i})\mathit{\boldsymbol{V}}({\theta _i}, \varphi } ) + {\mathit{\boldsymbol{w}}_{nk}} $$ (17) 为简便起见,xnk和$ \mathit{\boldsymbol{V}}({\theta _i}, \varphi ) $分别用x和V代替,则散射体幅度估计可用如下最小二乘问题[8]表示:
$$ \mathit{\boldsymbol{\hat \alpha }} = \arg \mathop {\min }\limits_\mathit{\boldsymbol{\alpha }} {\left\| {\mathit{\boldsymbol{x}}-\mathit{\boldsymbol{V\alpha }}} \right\|^2} $$ (18) 式中,;$ \mathit{\boldsymbol{\hat \alpha }} = {\left[{\hat \alpha ({\theta _1})\hat \alpha ({\theta _1}) \cdots \hat \alpha ({\theta _N})} \right]^{\rm{T}}} $。求解可得:
$$ \mathit{\boldsymbol{\hat \alpha }} = {\mathit{\boldsymbol{V}}^ + }\mathit{\boldsymbol{x}} $$ (19) 式中,(·)+为矩阵的伪逆。
由式(16)、式(17)、式(19)可得到预处理后的杂波为:
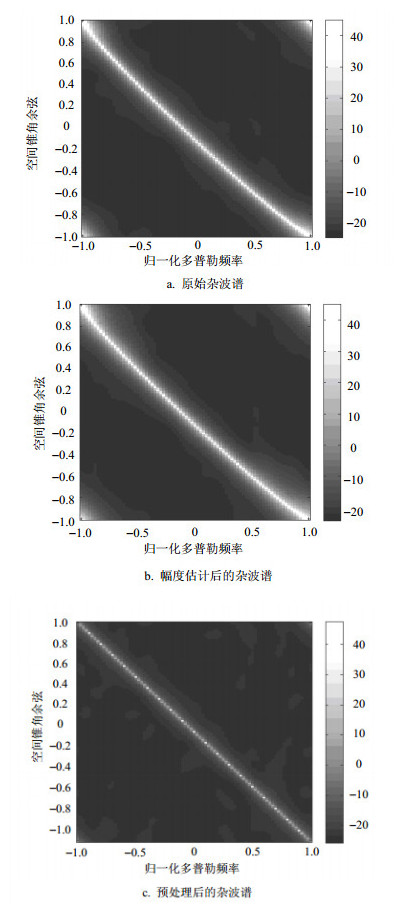
$$ \mathit{\boldsymbol{x}}_{nk}^P(\varphi ) = \sum\limits_{i = 1}^{{N_c}} {\hat \alpha ({\theta _i})\mathit{\boldsymbol{V}}({\theta _i}, \varphi )\mathit{\boldsymbol{\Delta }}({\theta _i}, \varphi )} + {\mathit{\boldsymbol{w}}_{nk}} $$ (20) 图 3a、3b及3c分别给出了存在偏航角误差(θc=7.28°)时某距离单元的原始杂波谱、幅度估计之后的杂波谱及预处理之后的杂波谱,仿真参数如第4节所示。

图 3 某距离单元的杂波功率谱
由图 3a~图 3c可知,经过幅度估计之后,能够较好地恢复原始杂波谱,而经过预处理之后,杂波谱在空时二维平面上的分布由非正侧视的椭圆形变成正侧视的斜带形,说明通过本文杂波预处理方法能够有效消除偏航角的影响,使得杂波归一化多普勒频率与归一化空域频率之间满足$ {\bar f_d} = \beta {\bar f_s} $;预处理后的杂波功率基本没有变化,说明预处理并没有造成较大的功率损失,即本文提出的预处理方法是有效的。
杂波预处理有效地消除了偏航角误差的影响,降低了杂波的非均匀性,然而统计型STAP方法需要的均匀样本数较多,计算量大,为此,结合PSWF构造子空间方法,本文提出一种预处理PSWF方法以降低计算量与样本数,具体步骤如下:
1) 依据雷达参数、探测环境几何构型及PSWF函数集,离线构造杂波子空间、待测样本各散射体的杂波导向矢量及预处理因子。
2) 依据待测样本数据,估计步骤1) 中散射体导向矢量对应的幅度,得到新的回波数据。
3) 依据步骤1) 构造的预处理因子对步骤2) 得到的回波数据进行预处理。
4) 依据步骤1) 中构造的杂波子空间及步骤3) 中预处理后的数据进行STAP处理。
-
为了验证本文所提方法的有效性,进行了如下仿真实验。在仿真的过程中采用10元均匀等距线阵,阵元间距d=0.11 m;载机飞行高度H=3 073 m;速度V=108 m/s;雷达发射波长λ=0.22 m;脉冲重复频率fr=1984 Hz;相干处理脉冲数为12;杂噪比为60 dB。
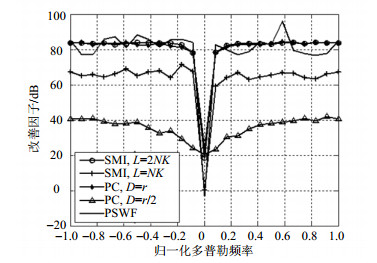
依据Brennan准则及仿真参数可以得到杂波协方差矩阵的秩r=21,图 4给出了SMI、PC及PSWF的3种方法在不同样本数下不存在偏航角误差时的改善因子仿真结果,其中PSWF所用的样本数为10。图 5给出了存在偏航角误差时SMI、PSWF及预处理后PSWF的3种方法的改善因子仿真结果。

图 4 不存在偏航角误差时的改善因子仿真结果

图 5 存在偏航角误差时的改善因子仿真结果
由图 4可以发现,样本数对于SMI及PC方法的杂波抑制性能有着较大的影响,样本数越少,SMI及PC方法的杂波抑制性能越差,而PSWF方法仅需少量样本即可获得较好的性能;结合表 1的算法复杂度分析可知PSWF方法不仅计算量小,而且对均匀样本的需求量也少。
由图 5可以发现,当存在偏航角误差时,SMI方法改善因子的凹口较宽,说明最小可检测速度(minimum detectable velocity, MDV)[1]较大,对于低速目标检测性能较差,改善因子的凹口较浅,说明杂波抑制不够充分;PSWF方法不仅MDV大且杂波抑制效果非常差,故不适用于存在偏航角误差的情况;而预处理后PSWF方法的杂波抑制和动目标检测能力显然优于其他方法,改善因子的凹口最深最宽,杂波抑制相对充分,低速动目标的检测性能更好。需要说明的是,预处理前后,改善因子的凹口的位置有所改变,这是因为偏航角的存在使得主瓣杂波对应的归一化多普勒频率不再为零,因此在对杂波进行预处理的同时,目标同样也需要进行处理。
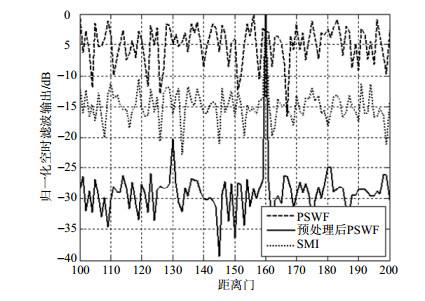
图 6给出了存在偏航角误差时PSWF、预处理后PSWF方法及SMI方法对于每个距离门的归一化滤波结果,为了更好地显示低速动目标的检测性能,分别在第130号距离门及160号距离门上注入信噪比为0 dB弱目标及20 dB的强目标,其中,两个目标的归一化空域频率为0,归一化多普勒频率为-0.05。

图 6 存在偏航角误差时各距离门的归一化滤波结果
由图 6的仿真结果可知,PSWF杂波抑制性能很差,无论是强目标还是弱目标都不能有效检测;SMI方法虽然对杂波有所抑制,但抑制性能较差,且偏航角误差使得其MDV较大,降低其对于低速目标的检测性能,因此不能检测出位于第130号距离门上的低速弱目标;而预处理后PSWF方法不仅能够无功率损失的检测出两个目标,而且杂波抑制性能也得到了提升,说明本文的所提方法是有效的。
-
本文首先依据雷达参数、探测环境几何构型、PSWF函数的时限带限特性等先验知识,推导出PSWF构造杂波子空间方法,该方法可提前离线构造,计算量小,均匀样本需求量少;随后,针对存在阵面偏航角误差时杂波秩无法准确估计造成PSWF等方法的杂波抑制性能下降的问题提出一种利用雷达参数及探测环境几何构型的杂波预处理方法以消除偏航角误差的影响,最后,针对统计型STAP方法计算量大、均匀样本需求多的问题结合PSWF方法及本文所提杂波预处理方法提出一种预处理后PSWF方法,该方法在存在偏航角误差时有着较好的空时处理性能,且预处理因子及杂波子空间可提前离线构造,因此,计算量较小、均匀样本需求量少。然而,本文仅考虑小角度偏航角误差这一种非均匀情况,实际机载雷达的工作环境更为恶劣,如何进一步提高此时STAP算法的性能亟待解决,因此下一步工作将围绕这些问题展开。
Radar Parameters Aided STAP for Heterogeneous Clutter Suppression
-
摘要: 针对非均匀杂波环境下空时自适应处理杂波抑制性能下降的问题,基于扁平椭球波函数的时限带限特性,给出一种利用雷达参数信息构造子空间的杂波抑制方法,降低了计算量与均匀样本数需求,提高了对非均匀杂波的抑制性能。其次,针对存在阵面偏航角误差时杂波秩无法准确估计造成基于扁平椭球波函数构造杂波子空间方法杂波抑制性能下降的问题,结合雷达参数信息及探测环境的几何构型提出一种杂波预处理方法以消除偏航角影响,从而提升其非均匀环境下的杂波抑制性能。仿真结果验证了算法的有效性。Abstract: The heterogeneous clutter results in degradation of clutter suppression performance of space-time adaptive processing (STAP). To solve this problem, a subspace method is proposed based on the radar parameters and the time-limited and band-limited features of the prolate spheroidal wave functions. The method can improve the clutter suppression performance in heterogeneous environment, reduce the computational complexity and demand for homogeneous samples. However, it is hard to estimate the precise clutter rank if the proposed method suffers from crab angle. Therefore, with the radar parameters and the detection environment geometry, a pre-process method is presented to eliminate the crab influence and improve the clutter suppression performance in heterogeneous environment. Finally, simulation attests its effectiveness.
-
表 1 计算复杂度
算法 估计空时相关矩阵 计算权值 SMI $ O(L{(NK)^2}) $ $ O({(NK)^3}) $ PC/EC $ O(D{(NK)^2} + O({(NK)^2})) $ $ O({(NK)^3}) $ PSWF 提前离线构造 $ O((NK)) $  下载: 导出CSV
下载: 导出CSV
-
[1] GUERCI J R. Space-time adaptive processing for radar[M]. Norwood:Artech House, 2003:51-72. [2] DEGURSE J F, SAVY L, MARCOS S. Reduced-rank STAP for target detection in heterogeneous environment[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(2):1153-1162. doi: 10.1109/TAES.2014.120414 [3] ZHANG Wei, HE Zi-shu, LI Jun, et al. A method for finding best channels in beam-space post-doppler reduced-dimension STAP[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(1):254-264. doi: 10.1109/TAES.2013.120145 [4] 和洁, 冯大政, 向聪, 等.机载MIMO雷达降维空时自适应处理算法[J].电子科技大学学报, 2012, 41(1):31-35. http://www.xb.uestc.edu.cn/nature/index.php?p=newsitem&item_id=1051 HE Jie, FENG Da-zheng, XIANG Cong, et al. Reduced-dimension STAP for airborne MIMO radars[J]. Journal of University of Electronic Science and Technology of China, 2012, 41(1):31-35. http://www.xb.uestc.edu.cn/nature/index.php?p=newsitem&item_id=1051 [5] GUERCI J R, BERGIN J S. Principal components, covariance matrix tapers, and the subspace leakage problem[J]. IEEE Transactions on Aerospace and Electronics Systems, 2002, 38(1):152-162. doi: 10.1109/7.993236 [6] HAIMOVICH A M.The eigencanceler adaptive radar by eigenanalysis methods[J]. IEEE Transactions on Aerospace and Electronic Systems, 1996, 32(2):532-542. doi: 10.1109/7.489498 [7] 阳召成.基于稀疏性的空时自适应处理理论和方法[D].长沙:国防科学技术大学研究生院, 2013. http://www.oalib.com/references/19331402 YANG Zhao-cheng. Theory and methods of sparsity-based space-time adaptive processing[D]. Changsha:Graduate School of National University of Defense Technology, 2013. http://www.oalib.com/references/19331402 [8] MEVIN W L, SHOWMAN G A. An approach to knowledge-aided covariance estimation[J]. IEEE Transactions on Aerospace and Electronic Systems, 2006, 42(3):1021-1042. doi: 10.1109/TAES.2006.248216 [9] AUBRY A, MAIO A D, FARINA A, et al. Knowledge-aided (potentially cognitive) transmit signal and receive filter design in signal-dependent clutter[J]. IEEE Transactions on Aerospace and Electronic Systems, 2013, 49(1):93-117. doi: 10.1109/TAES.2013.6404093 [10] 吕晖, 冯大政, 和洁, 等.一种简化的机载MIMO雷达杂波特征相消器[J].航空学报, 2011, 32(5):866-872. http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201105012.htm LÜ Hui, FENG Da-zheng, HE Jie, et al. A simplified eigencanceler for airborne MIMO radar clutter suppression[J]. Acta Aeronautica et Astronautica Sinica, 2011, 32(5):866-872. http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201105012.htm [11] CHEN Chun-yang, VAIDYANATHAN P P. MIMO radar space-time adaptive processing using prolate spheroidal wave functions[J]. IEEE Transactions on Signal Processing, 2008, 56(2):623-635. doi: 10.1109/TSP.2007.907917 [12] YANG Xiao-peng, LIU Yong-xu, LONG Teng. Robust non-homogeneity detection algorithm based on prolate spheroidal wave functions for space-time adaptive processing[J]. IET Radar Sonar & Navigation, 2013, 7(1):47-54. https://www.researchgate.net/publication/260630129_Robust_non-homogeneity_detection_algorithm_based_on_prolate_spheroidal_wave_functions_for_space-time_adaptive_processing [13] 翟伟伟, 张弓, 刘文波.基于杂波子空间估计的MIMO雷达降维STAP研究[J].航空学报, 2010, 31(9):1824-1831. http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201009019.htm ZHAI Wei-wei, ZHANG Gong, LIU Wen-bo. Study of reduced-rank STAP based on estimation of clutter subspace for MIMO radar[J]. Acta Aeronautica et Astronautica Sinica, 2010, 31(9):1824-1831. http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201009019.htm [14] CHEN Q Y, GOTTLIEB D, HESTHAVEN J S. Spectral methods based on prolate spheroidal wave functions for hyperbolic PDEs[J]. SIAM Journal on Numerical Analysis, 2005, 43(5):191-933. http://d.wanfangdata.com.cn/NSTLQK_NSTL_QKJJ029629188.aspx -

 点击查看大图
点击查看大图
图(6) / 表(1)
计量
- 文章访问数: 4104
- HTML全文浏览量: 1132
- PDF下载量: 99
- 被引次数: 0
