 ISSN
ISSN 


 下载:
下载:

-
目前,美国在韩国部署“萨德”导弹防御系统已成定局,加强对该系统的研究也就格外重要。导弹防御系统是对抗弹道导弹进攻的最有效方式,到目前为止,仅有美国建成并已开展多次近实战条件下的试验。传统的导弹防御系统开始于同步轨道的预警卫星,依靠探测导弹发射时的红外信号发现目标,并在导弹关机前确定目标大致位置和射向,引导预警雷达对目标进行搜索[1]。预警雷达捕获目标后进行跟踪、预报,进而引导精密跟踪雷达完成对目标的精密跟踪和拦截导引。近年来,美国利用两颗低轨预警试验星(STSS_Demo1/2)成功捕获目标并全程跟踪[2-3],已成为未来预警卫星的重要发展方向。由于太空跟踪与监视系统(space transportation system, STSS)卫星可以全程跟踪弹道导弹,其跟踪数据可以直接引导精密跟踪雷达捕获目标,相关技术已经得到试验验证。
相控阵雷达搜索优化问题就是处理好任务需求和雷达资源之间的冲突问题。在没有天基引导信息时,文献[1]和文献[4]通过优化搜索周期、探测距离、捕获时间等参数,重点解决相控阵雷达搜索与跟踪资源的冲突。文献[5-7]则探讨了相控阵雷达搜索波位和驻留时间的优化问题,但却没有考虑任务优先级问题。文献[8]采用分区搜索并设置威胁级别的方法提高相控阵雷达的搜索效率。文献[9]对地平线搜索预警的搜索波束编排问题进行了研究,以尽早捕获上升段的导弹。
当存在天基引导信息时,相控阵雷达的搜索范围进一步缩小。文献[10]研究了有预警信息条件下的相控阵雷达监视空域问题,提出了基于弹道预报的相控阵雷达小窗口监视空域模型。文献[11]则分析了在引导信息存在的条件下相控阵雷达检测性能的提升。文献[12]研究了预警引导信息对预警雷达搜索半径的影响问题,指出随着引导信息精度的提高,搜索半径将逐步缩小。上述文献在计算雷达搜索半径时,考虑低轨预警卫星引导精密跟踪雷达的较少,对应的雷达搜索半径均为球形半径。而实际上,引导误差在雷达径向的分量并不影响其角度搜索区域,以球形半径作为搜索半径明显增大了搜索区域。本文针对这一问题展开研究,以多星联合跟踪弹道导弹为例,研究观测信息引导精密跟踪雷达搜索目标时的搜索区域问题,进而为雷达合理安排搜索波束、提高搜索效率提供依据。
-
高轨预警卫星采用的红外探测器决定了其只能在导弹的上升段进行观测,并在导弹关机之后基于观测信息对飞行轨迹进行预测。预警卫星对导弹弹道的预报误差不仅与观测随机误差、系统误差有关,还与关机点时刻观测误差、导弹飞行时间等因素有关。同时,由于预警卫星采用被动探测模式,无法测量距离信息,加之主动段后期导弹飞行速度较高,因此高轨预警卫星对导弹关机点的状态估计精度通常较差,无法直接引导精密跟踪雷达。为解决这一问题,低轨的STSS在扫描相机的基础上又安装了跟踪相机,采用双星联合观测的方式大幅度提高观测精度。这种观测是对无动力导弹的实时观测,无需弹道外推,避免了误差管道的发散。本文首先对多星联合观测条件下的观测精度进行分析。
-
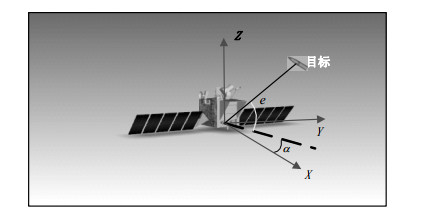
本文以STSS卫星速度坐标系(以卫星质心为原点,X轴指向飞行速度方向,Y轴在飞行器主平面内指向太阳帆板方向,与X轴满足右手系;Z轴垂直于XOY平面且满足右手准则)为基础,分析在速度坐标系下卫星对目标的观测,其观测场景如图 1所示。

图 1 预警卫星观测坐标系
在J2000惯性坐标系下,低轨预警卫星跟踪传感器在万向节的支持下跟随目标运动。在任意时刻tk,设卫星的位置为Sk,目标的位置为xk。则卫星的观测方程为:
$$ {\mathit{\boldsymbol{z}}_k} = \mathit{\boldsymbol{h}}({\mathit{\boldsymbol{x}}_k}, {\mathit{\boldsymbol{s}}_k}) + {\mathit{\boldsymbol{w}}_k} $$ (1) 式中,为卫星观测目标的观测向量,其中α为方位角,e为俯仰角;h(xk, sk)为测量方程;wk为传感器测量噪声,通常假设服从零均值高斯分布,若已知方差矩阵为Rk,则:
$$ {\boldsymbol{R}_k} = \left[{\begin{array}{*{20}{c}} {\sigma _\alpha ^2}&0\\ 0&{\sigma _e^2} \end{array}} \right] $$ (2) 则$ {\mathit{\boldsymbol{w}}_k} \sim N(0, {\boldsymbol{R}_k}) $。
与搜索传感器[12]不同的是,天基跟踪传感器视场较窄且跟踪目标是运动的,方位角与俯仰角的观测相互独立。
在已知ECI坐标系目标的位置及卫星位置、速度参数的基础上,可以解算得到速度坐标系下探测目标的角度信息,相应转换矩阵为$ T_{{\rm{VEL}}}^{{\rm{ECI}}} $,则卫星的观测方程可以表示为:
$$ \mathit{\boldsymbol{h}}({\mathit{\boldsymbol{x}}_k}, {\mathit{\boldsymbol{s}}_k}) = {({\alpha _k}, {e_k})^T} = {\rm{H}}\left[{\boldsymbol{T}_{{\rm{VEL}}}^{{\rm{ECI}}}({\mathit{\boldsymbol{x}}_k}, {\mathit{\boldsymbol{s}}_k})} \right] $$ (3) 很明显,卫星速度坐标系下的测量采用直角坐标系,使得观测矢量的转换方程为非线性方程。在STSS预警系统中,两颗卫星对同一目标进行联合观测,采用速度坐标系表征测量角度时,各个卫星的速度矢量均不相同,因此转换矩阵$ T_{{\rm{VEL}}}^{{\rm{ECI}}} $也不相同,难以得到相应的解析表达式。为此,论文采用惯性坐标系J2000的平移坐标系:以卫星质心为坐标原点,坐标系的三轴与J2000各轴指向相同,此时,由于两坐标系指向相同,不需要坐标变换,即T=1。需要注意的是,这种假设仅适用于能够绕质心各向自由旋转的传感器。
设目标位于,有N颗观测卫星,其中第i颗卫星位于。得到观测矢量h(xk, sk)中两个角度的解析表达式:
$$ {\alpha _{ik}} = \arctan \left[{\frac{{{y_{tk}}-{y_{isk}}}}{{{x_{tk}}-{x_{isk}}}}} \right] $$ (4) $$ {e_{ik}} = \arcsin \left[{\frac{{{z_{tk}}-{z_{sk}}}}{{\sqrt {{{({x_{tk}}-{x_{isk}})}^2} + {{({y_{tk}}-{y_{isk}})}^2} + {{({z_{tk}} - {z_{isk}})}^2}} }}} \right] $$ (5) -
在多颗卫星进行联合观测时,对目标位置的估计,也就是基于观测值zik对目标位置xk进行估计。极大似然估计被认为是统计意义下的最优估计,本文采用极大似然估计法估计目标位置。首先基于k时刻第i个卫星的测量结果zik构造似然函数:
$$ \begin{array}{c} p({z_{ik}}\left| {{{\rm{x}}_k}} \right.) = {\left| {2\pi \left| {{\mathit{\boldsymbol{R}}_k}} \right|} \right|^{- 1/2}} \times \\ \exp \left\{ {- \frac{1}{2}{{[{z_{ik}}-\mathit{\boldsymbol{h}}({\mathit{\boldsymbol{x}}_k}, {\mathit{\boldsymbol{s}}_{ik}})]}^{\rm{T}}}\mathit{\boldsymbol{R}}_k^{ - 1}[{z_{ik}}-\mathit{\boldsymbol{h}}({\mathit{\boldsymbol{x}}_k}, {\mathit{\boldsymbol{s}}_{ik}})]} \right\} \end{array} $$ (6) 式中,$ \left| {{R_{ik}}} \right| $表示矩阵Rk的模。同时,由于各卫星观测独立,估计对象均为目标位置xk,因此可以计算测量集合$ {\mathit{\boldsymbol{z}}_k} = {\left\{ {{z_{ik}}} \right\}_{i = 1, 2, \cdots, N}} $的联合概率密度函数,即联合似然函数表示为上述似然函数的乘积:
$$ \begin{array}{c} p({Z_k}\left| {{\mathit{\boldsymbol{x}}_k}} \right.) = \left\{ {\prod\limits_{i = 1}^N {\left[{{{(2{\rm{\pi }}\left| {{\mathit{\boldsymbol{R}}_{ik}}} \right|)}^{-1/2}}} \right]} } \right\} \times \\ \exp \left\{ { - \frac{1}{2}\sum\limits_{i = 1}^N {{{[{\mathit{\boldsymbol{z}}_{ik}}-\mathit{\boldsymbol{h}}({\mathit{\boldsymbol{x}}_k}, {\mathit{\boldsymbol{s}}_{ik}})]}^{\rm{T}}}\mathit{\boldsymbol{R}}_{ik}^{ - 1}[{\mathit{\boldsymbol{z}}_{ik}}-\mathit{\boldsymbol{h}}({\mathit{\boldsymbol{x}}_k}, {\mathit{\boldsymbol{s}}_{ik}})]} } \right\}{\rm{ = }}\\ \left\{ {\prod\limits_{i = 1}^N {\left[{{{(2{\rm{\pi }}\left| {{\mathit{\boldsymbol{R}}_{ik}}} \right|)}^{-1/2}}} \right]} } \right\}\exp \left\{ { -\frac{1}{2}\mathit{\boldsymbol{v}}_r^{\rm{T}}{\mathit{\boldsymbol{v}}_r}} \right\} \end{array} $$ (7) 式中,。
所谓的极大似然估计,则是求解观测值使似然函数值取极大。式(7)中,第一项为常数,第二项为带负号的指数项,求解极大似然估计,也就转变为下列公式,即:
$$ \begin{array}{c} \mathit{\boldsymbol{x}}_k^{{\rm{MLE}}} = \\ \arg \min \left\{ {\sum\limits_{i = 1}^N {{{[{\mathit{\boldsymbol{z}}_{ik}}-\mathit{\boldsymbol{h}}({\mathit{\boldsymbol{x}}_k}, {\mathit{\boldsymbol{s}}_{ik}})]}^{\rm{T}}}\mathit{\boldsymbol{R}}_{ik}^{ - 1}[{\mathit{\boldsymbol{z}}_{ik}}-\mathit{\boldsymbol{h}}({\mathit{\boldsymbol{x}}_k}, {\mathit{\boldsymbol{s}}_{ik}})]} } \right\} = \\ \arg \min \left\{ {\mathit{\boldsymbol{v}}_r^{\rm{T}}{\mathit{\boldsymbol{v}}_r}} \right\} \end{array} $$ (8) 这是一个非线性最小二乘问题,求解极大似然估计问题也就变为非线性最小二乘的估计问题。由于上式并非目标位置矢量xk的显性表达式,为实现对目标位置的估计,需要做一定的变换。为求解$ \mathit{\boldsymbol{v}}_r^{\rm{T}}{\mathit{\boldsymbol{v}}_r} $的极大值,取vr对xk的偏导数,得到表达式:
$$ \begin{array}{c} \mathit{\boldsymbol{T}}({\mathit{\boldsymbol{x}}_k}) = {\left[{{\nabla _{{\mathit{\boldsymbol{x}}_k}}}\mathit{\boldsymbol{v}}_{\rm{r}}^{\rm{T}}} \right]^{\rm{T}}} = \left[{\begin{array}{*{20}{c}} {{\mathit{\boldsymbol{T}}_1}({\mathit{\boldsymbol{x}}_k})}\\ \vdots \\ {{\mathit{\boldsymbol{T}}_N}({\mathit{\boldsymbol{x}}_k})} \end{array}} \right] = \\ \left[{\begin{array}{*{20}{c}} {- \mathit{\boldsymbol{R}}_{1k}^{- 1/2}{{\left[{{\nabla _{{\mathit{\boldsymbol{x}}_k}}}{\mathit{\boldsymbol{h}}^{\rm{T}}}({\mathit{\boldsymbol{x}}_k}, {\mathit{\boldsymbol{s}}_{1k}})} \right]}^{\rm{T}}}}\\ \vdots \\ { - \mathit{\boldsymbol{R}}_{Nk}^{ - 1/2}{{\left[{{\nabla _{{\mathit{\boldsymbol{x}}_k}}}{\mathit{\boldsymbol{h}}^{\rm{T}}}({\mathit{\boldsymbol{x}}_k}, {\mathit{\boldsymbol{s}}_{Nk}})} \right]}^{\rm{T}}}} \end{array}} \right] \end{array} $$ (9) 式中,。
其中,
$$ {\nabla _{{\mathit{\boldsymbol{x}}_k}}}{\mathit{\boldsymbol{h}}^{\rm{T}}}({\mathit{\boldsymbol{x}}_k}, {\mathit{\boldsymbol{s}}_{1k}}) = {\nabla _{{\mathit{\boldsymbol{x}}_k}}}\left[{\begin{array}{*{20}{c}} {{\alpha _k}}&{{e_k}} \end{array}} \right] = \left[{\begin{array}{*{20}{c}} {\frac{{\partial {\alpha _k}}}{{\partial {x_{tk}}}}}&{\frac{{\partial {e_k}}}{{\partial {x_{tk}}}}}\\ {\frac{{\partial {\alpha _k}}}{{\partial {y_{tk}}}}}&{\frac{{\partial {e_k}}}{{\partial {y_{tk}}}}}\\ {\frac{{\partial {\alpha _k}}}{{\partial {z_{tk}}}}}&{\frac{{\partial {e_k}}}{{\partial {z_{tk}}}}} \end{array}} \right] $$ 根据测量的表示形式及本文对坐标轴的定义,可以得到:
$$ {\nabla _{{x_k}}}{e_k} = \left[{\begin{array}{*{20}{c}} {\frac{{- [{x_{tk}}-{x_{ik}}][{z_{tk}}-{z_{ik}}]}}{{r_t^2(i){r_d}(i)}}}\\ {\frac{{ - [{y_{tk}}-{y_{ik}}][{z_{tk}}-{z_{ik}}]}}{{r_t^2(i){r_d}(i)}}}\\ {\frac{{{r_d}(i)}}{{r_t^2(i)}}} \end{array}} \right] $$ $$ {\nabla _{{x_k}}}{\alpha _k} = {\left[{\begin{array}{*{20}{l}} {\frac{{- [{y_{tk}}-{y_{ik}}]}}{{r_d^2(i)}}}&{\frac{{[{x_{tk}}-{x_{ik}}]}}{{r_d^2(i)}}}&0 \end{array}} \right]^{\rm{T}}} $$ (10) 式中,$ {r_t}(i) = \sqrt {{{[{x_{tk}}-{x_{ik}}]}^2} + {{[{y_{tk}}-{y_{ik}}]}^2} + {{[{z_{tk}}-{z_{ik}}]}^2}} $;$ {r_d}(i) = \sqrt {{{[{x_{tk}}-{x_{ik}}]}^2} + {{[{y_{tk}}-{y_{ik}}]}^2}} $。
由于方位向与俯仰向测量独立,得到N个探测器共同探测时的Fisher信息矩阵为:
$$ \begin{array}{l} \mathit{\boldsymbol{F}} = \mathit{\boldsymbol{T}}{({\mathit{\boldsymbol{x}}_k})^{\rm{T}}}\mathit{\boldsymbol{T}}({\mathit{\boldsymbol{x}}_k}) = \\ \sum\limits_{i = 1}^N {\left( {\frac{{{\nabla _{{\mathit{\boldsymbol{x}}_k}}}\alpha _{ki}^{\rm{T}}{\nabla _{{\mathit{\boldsymbol{x}}_k}}}\alpha _{ki}^{}}}{{\sigma _\alpha ^2}} + \frac{{{\nabla _{{\mathit{\boldsymbol{x}}_k}}}\beta _{ki}^{\rm{T}}{\nabla _{{\mathit{\boldsymbol{x}}_k}}}\beta _{ki}^{}}}{{\sigma _\beta ^2}}} \right)} \end{array} $$ (11) 对于待估计的状态变量xk,当取k时刻的真实值时,得到估计结果的克拉美罗下界(Cramer -Rao low band)[14]:
$$ \mathit{\boldsymbol{P}}_{{\mathit{\boldsymbol{x}}_k}}^{{\rm{CRB}}} = {\mathit{\boldsymbol{F}}^{-1}}\left| {_{{\mathit{\boldsymbol{x}}_k} = \mathit{\boldsymbol{x}}_k^{{\rm{TRUE}}}}} \right. $$ (12) 对状态变量的非线性最小二乘估计,其最优估计可以与真实值保持渐进一致,因此估计结果的方差矩阵可以用克拉美罗方差矩阵近似,得到J2000坐标系下的测量协方差矩阵为:
$$ {\rm{Cov}}({C_{ei}}) \approx P_{{x_k}}^{{\rm{CRB}}} $$ (13) 这是卫星对xk进行极大似然估计时的精度,低轨预警卫星能够长时间保持对目标的跟踪,长时间跟踪自由段的目标使得跟踪精度可以接近极限精度,即克拉美罗界,因此本文以跟踪误差的克拉美罗界作为跟踪精度。以该精度为基础,本文进一步研究预警卫星引导下相控阵雷达的搜索范围。
-
精密跟踪相控阵雷达在对目标进行搜索时,雷达需要在卫星的引导下确定搜索区域的中心,但搜索区域的大小则需要根据引导信息的精度来计算。在对目标进行搜索时,现有方法基本采用的是固定搜索半径方法[10-13],存在搜索半径过大的问题。由于波位编排仅在雷达指向中心的一定角度范围内进行,也就需要将预警卫星的测量协方差矩阵变换到雷达指向坐标系下。首先对雷达站直角坐标系、相控阵雷达指向坐标系的定义以及与惯性坐标系的转换关系进行介绍,之后对雷达搜索范围的确定方法进行分析。
1)10惯性系到地固系的转换
这里假设地球为匀速旋转的均匀球体,则从地心惯性坐标系$ O-{x_{ei}}{y_{ei}}{z_{ei}} $到地心固连坐标系$ O-{x_{ef}}{y_{ef}}{z_{ef}} $的转换矩阵为$ {\mathit{\boldsymbol{M}}_g} = {\mathit{\boldsymbol{R}}_z}{\rm{(}}{\Omega _g}) $,其中$ {\Omega _g} $为地球固连坐标系的X轴与平春分点的夹角,$ {\mathit{\boldsymbol{R}}_z}{\rm{(}}{\Omega _g}) $为绕Z轴旋转$ {\Omega _g} $角度的旋转矩阵。
2) 地固系到雷达测量直角坐标系的转换
雷达测量直角坐标系的原点在雷达阵面中心,X轴在当地水平面内指向正北,Z轴在水平面内指向正东,Y轴指向天顶方向。由地球固连坐标系$ O-{x_{ef}}{y_{ef}}{z_{ef}} $到雷达测量直角坐标系$ O-{x_r}{y_r}{z_r} $的转换矩阵为:
$$ \begin{array}{l} \left[ {\begin{array}{*{20}{c}} {{x_r}}\\ {{y_r}}\\ {{z_r}} \end{array}} \right] = {\mathit{\boldsymbol{R}}_Y}( - {\rm{\pi }}/2){\mathit{\boldsymbol{R}}_X}({\varphi _R}){\mathit{\boldsymbol{R}}_{\rm{Z}}}({\lambda _R}{\rm{ - \pi }}/2) \times \\ \;\;\;\;\;\;\left[ {\begin{array}{*{20}{c}} {{x_{ef}} - {x_{ro}}}\\ {{y_{ef}} - {y_{ro}}}\\ {{z_{ef}} - {z_{ro}}} \end{array}} \right] = {\mathit{\boldsymbol{M}}_p}\left[ {\begin{array}{*{20}{c}} {{x_{ef}} - {x_{ro}}}\\ {{y_{ef}} - {y_{ro}}}\\ {{z_{ef}} - {z_{ro}}} \end{array}} \right] \end{array} $$ (14) 式中,$ ({x_{ro}}, {y_{ro}}, {z_{ro}}) $为雷达在地固系下的坐标;(λR, φR)为雷达站的天文经纬度;$ {\mathit{\boldsymbol{R}}_Y}(-{\rm{\pi }}/2) $、$ {\mathit{\boldsymbol{R}}_X}({\varphi _R}) $和$ {\mathit{\boldsymbol{R}}_Z}({\lambda _R}-{\rm{\pi }}/2) $分别表示绕Y轴旋转-π/2、绕X轴旋转φR和绕Z轴旋转$ {\lambda _R}-{\rm{\pi }}/2 $的旋转矩阵。
3) 雷达测量直角坐标系到雷达指向坐标系的转换
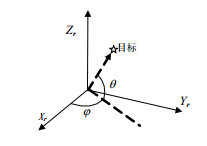
对于搜索雷达而言,径向误差并不影响波位的编排。为此,构造X轴指向目标的指向坐标系$ O-{x_s}{y_s}{z_s} $。其中,目标在雷达测量坐标系下的方位角为φ,俯仰角为θ。在雷达直角测量坐标系的基础上,首先绕Z轴旋转方位角φ,之后绕Y轴旋转-θ,得到新的坐标系。此时,新构造的雷达指向坐标系的X轴指向目标,如图 2所示。

图 2 雷达指向坐标系
因此,得到新的协方差矩阵:
$$ \left[{\begin{array}{*{20}{c}} {{x_s}}\\ {{y_s}}\\ {{z_s}} \end{array}} \right] = {\mathit{\boldsymbol{R}}_X}( - \theta ){\mathit{\boldsymbol{R}}_Z}(\varphi )\left[{\begin{array}{*{20}{c}} {{x_r}}\\ {{y_r}}\\ {{z_r}} \end{array}} \right] = {\mathit{\boldsymbol{M}}_s}\left[{\begin{array}{*{20}{c}} {{x_r}}\\ {{y_r}}\\ {{z_r}} \end{array}} \right] $$ (15) 根据以上转换矩阵,在得到地心惯性坐标系下的协方差矩阵后,可以得到雷达指向坐标系下的协方差矩阵为:
$$ {\rm{Cov}}({C_s}) = {\mathit{\boldsymbol{J}}_t}{\rm{Cov}}({C_{ei}}){\mathit{\boldsymbol{J}}_t} $$ (16) 其中Jt为总转换矩阵:
$$ {\mathit{\boldsymbol{J}}_t} = {\mathit{\boldsymbol{M}}_s}{\mathit{\boldsymbol{M}}_p}{\mathit{\boldsymbol{M}}_g} $$ (17) 得到新的误差协方差矩阵中$ {\rm{Cov}}({C_s}) $,设对角线上三元素分别为$ \delta _{sx}^2 $、$ \delta _{sy}^2 $和$ \delta _{sz}^2 $,分别代表X、Y和Z方向的方差。经等效推算,上述坐标变换并不会改变协方差矩阵的模,进而当前大多搜索算法的半径为$ {r_{ts}} = \sqrt {\delta _{sx}^2 + \delta _{sy}^2 + \delta _{sz}^2} $,而本文分析得出的搜索半径$ {r_{ts}} = \sqrt {\delta _{sy}^2 + \delta _{sz}^2} $,显然该方法得出的搜索半径有所下降。根据统计学中的小概率事件原理,将搜索半径扩大3倍,可确保对目标的捕获。
-
为验证本文算法,采用两颗STSS验证卫星的轨道根数设置两颗观测卫星,对一枚导弹进行预警跟踪,引导地基精密跟踪雷达对目标进行捕获。仿真参数设置如下。
仿真时间:UTC时间,2017年7月1日1时10分00秒~2017年7月1日2时10分00秒。
低轨预警卫星1起始历元时刻的具体轨道根数为:半长轴7 716 km,偏心率0.001,轨道倾角58°,升交点赤经345°,近地点幅角36°,真近点角231°。卫星2的真近点角设为不同于卫星1的角度,其他参数与卫星1相同。卫星所带跟踪传感器视场角均为10角分,跟踪精度为50 μrad (1个标准差)。
精密跟踪雷达的经纬度为(160°, 6°),雷达阵面法线方向的波束宽度为0.1°。弹道导弹发射经纬度为(105°, -13°),落点经纬度为(177°, 34°),关机点速度为7.45 km/s。
仿真场景如图 3所示。

图 3 两颗STSS卫星观测目标几何示意图
1) 卫星相对位置关系对观测精度的影响
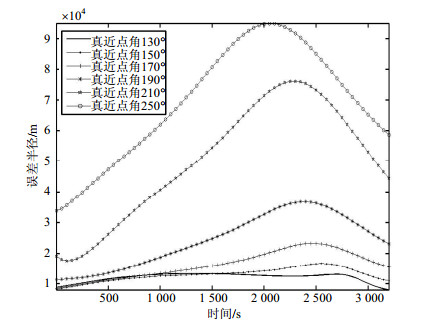
根据本文的分析,卫星相对目标的位置对跟踪精度的影响较大。这里首先分析地心坐标系下的跟踪精度,以跟踪误差半径来度量。图 4给出了卫星2采用不同真近点角情况时对应的误差半径。

图 4 不同真近点角下误差半径随时间的变化
上图中误差半径最大的轨道真近点角出现在250°,其次是210°,最小的误差半径出现在轨道真近点角130°处。随着两颗卫星真近点角之差的增大,两颗卫星的距离逐渐增大,观测对应的信息量也就越大,对应的误差半径也就越小。这一点与定位中的几何精度稀释因子是相似的。同时也要注意到,在实际应用中真近点角过大,两颗卫星同时观测同一目标的时间就会越短(这里仅考虑不同参数条件下两颗星均能共同观测的时段),反而会影响对目标的探测、跟踪,实际设计卫星间隔时可以折中考虑跟踪精度和跟踪时长。
2) 搜索半径分析
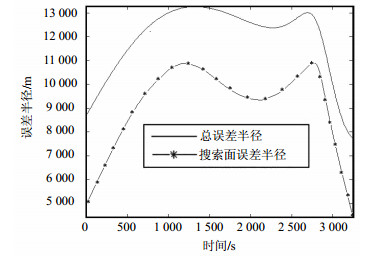
设定卫星2的真近点角为270°。将观测协方差矩阵转换到指向坐标系下,不同条件下的搜索半径如图 5所示。

图 5 本文所提方法搜索半径与球形搜索半径对比
对比以上结果可以发现,雷达波束需要搜索的区域由搜索面半径决定,相比总半径要小得多。一些文献里将总误差半径作为搜索半径,实际上是将搜索半径扩大了,浪费了搜索资源。同时,不同时刻两种误差之间的差别在变化,这是由于在雷达径向方向的误差分量在随时间持续变化,导致角度搜索面的误差分量也在变化。统计以上数据可知,本文提出的方法计算得到的误差半径较传统方法的误差半径平均降低了36%,在相控阵雷达面临空情越来越复杂、任务种类越来越多的条件下,误差半径的降低使雷达的搜索更有针对性,同时也意味着雷达能够有更多的资源执行其他任务,提高雷达探测能力。
Study on Search Area of Phased Array Radar under the Guidance of LEO Early Warning Satellite
-
摘要: 在弹道导弹防御过程中,相控阵雷达在预警卫星的引导下能否快速捕获并跟踪目标是开展拦截的关键。该文针对低轨预警卫星引导精密跟踪雷达搜索探测弹道导弹的搜索区域确定问题开展研究。以美国STSS低轨预警卫星为研究对象,首先分析了双星联合观测时的探测精度,提出以定位误差克拉美罗界作为跟踪卫星的定位精度,进而研究了测量误差在不同坐标系下的表达式及传递形式。最后,结合相控阵雷达搜索方式,提出并确定了相控阵雷达在指向坐标系下的搜索范围。仿真结果表明,采用该文的分析方法将有助于减小相控阵雷达搜索范围,提高雷达搜索针对性。Abstract: In the process of ballistic missile defense, the key to carry out missile intercept is whether the phased array radar could capture the target rapidly under the guidance of early warning satellite. Some key problems are studied in this paper, aiming at the problem of search area definition of precision tracking radar under the guidance of low earth orbit (LEO) early warning satellite. Taking the space transportation system (STSS) of the USA as the study object, the detecting precision of multi-satellite is analyzed firstly, the CramérRao Bound of position error is taken to express detection precision of tracking satellite, and then the expression and transmission of measurement error under different coordinates system are discussed. Finally, the search area of phased array radar under pointing coordinate system is proposed and deduced when searching type of phased array radar is taking into account. The simulation results indicate that when the method is adopted, the search area of phased array radar is reduced, making radar searching more purposeful.
-
[1] 邓桂福, 刘华林, 胥雷.远程相控阵雷达搜索参数优化设计[J].雷达科学与技术, 2012, 10(1):32-36. http://www.cnki.com.cn/Article/CJFDTOTAL-LDKJ201201008.htm DENG Gui-fu, LIU Hua-lin, XU Lei. Optimization of search parameters of long range phased array radar[J]. Radar Science and Technology, 2012, 10(1):32-36. http://www.cnki.com.cn/Article/CJFDTOTAL-LDKJ201201008.htm [2] 郭松, 贾成龙, 陈杰.美国STSS卫星有效载荷主要指标探讨[J].上海航天, 2012, 29(3):38-43. http://www.cnki.com.cn/Article/CJFDTOTAL-SHHT201203010.htm GUO Song, JIA Cheng-long, CHEN Jie. Discussion on main parameters of US STSS satellite payloads[J]. Aerospace Shanghai, 2012, 29(3):38-43. http://www.cnki.com.cn/Article/CJFDTOTAL-SHHT201203010.htm [3] Raytheon Company. Space tracking and surveillance system (STSS) Block 06 sensor suite[M]. Waltham:Raytheon Company, 2007. [4] 卢建斌, 胡卫东, 郁文贤.相控阵雷达资源受限时最优搜索性能研究[J].系统工程与电子技术, 2004, 26(10):1388-1390. http://www.cnki.com.cn/Article/CJFDTOTAL-XTYD200410017.htm LU Jian-bin, HU Wei-dong, YU Wen-xian. Research on optimal search performance of phased array radars with limited resources[J]. Systems Engineering and Electronics, 2004, 26(10):1388-1390. http://www.cnki.com.cn/Article/CJFDTOTAL-XTYD200410017.htm [5] ALEXOPOULOS A, SHAW A. Optimum configurations static and rotating phased arrays[J]. IEEE Transactions on Aerospace Electronics Systems, 2008, 44(4):1551-1559. doi: 10.1109/TAES.2008.4667730 [6] MATTHIESEN D J. Efficient beam scanning, energy allocation and time allocation for search and detection[C]//2010 IEEE International Symposium on Phased Array Systems and Technology (ARRAY). Waltham, USA:IEEE, 2010. [7] 王雪松, 汪连栋, 肖顺平.相控阵雷达天线最佳波位研究[J].电子学报, 2003, 31(6):805-808. http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU200306001.htm WANG Xue-song, WANG Lian-dong, XIAO Shun-ping. Study on optimal beam position of phased array radar antenna[J]. ACTA Electronica Sinica, 2003, 31(6):805-808. http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU200306001.htm [8] 滕俊, 郭万海, 付建国.舰载相控阵雷达对空搜索仰角上的资源分配[J].指挥控制与仿真, 2012, 34(2):62-65. http://www.cnki.com.cn/Article/CJFDTOTAL-QBZH201202014.htm TENG Jun, GUO Wan-hai, FU Jian-guo. Resource management in different elevation of shipborne phased array radar[J]. Command Control & Simulation, 2012, 34(2):62-65. http://www.cnki.com.cn/Article/CJFDTOTAL-QBZH201202014.htm [9] XU C, YE W, WANG C. Study on horizon surveillance in early warning phased array radar[C]//2009 International Conference on Radar. Guilin:[s.l.], 2009. [10] 周颖, 王雪松, 冯德军, 等.基于弹道预报的相控阵雷达监视空域研究[J].电子与信息学报, 2006, 28(7):1209-1217. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX200607012.htm ZHOU Ying, WANG Xue-song, FENG De-jun, et al. Surveillance volume of phased array radar based on trajectory prediction[J]. Journal of Electronics & Information Technology, 2006, 28(7):1209-1217. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX200607012.htm [11] 陈烺中, 郭张龙, 武涛, 等.天基信息支援下地基预警雷达工作精度分析[J].弹箭与制导学报, 2006, 26(2):989-995. http://www.cnki.com.cn/Article/CJFDTOTAL-DJZD2006S9035.htm CHEN Lang-zhong, GUO Zhang-long, WU Tao, et al. Research on working precision of ground-based early-warning radar under the satellite information support[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2006, 26(2):989-995. http://www.cnki.com.cn/Article/CJFDTOTAL-DJZD2006S9035.htm [12] 丁晓东, 何文献, 李跃新.天基信息支援下地基预警雷达搜索空域优化[J].上海航天, 2011(1):56-62. http://www.cnki.com.cn/Article/CJFDTOTAL-SHHT201101014.htm DING Xiao-dong, HE Wen-xian, LI Yue-xin. Research on working precision of ground-based early-warning radar under the satellite information support[J]. Aerospace Shanghai, 2011(1):56-62. http://www.cnki.com.cn/Article/CJFDTOTAL-SHHT201101014.htm [13] Bar-Shalom Y, LI Xiao-rong. Estimation and tracking:Principles, techniques and software[M]. Boston:Arteeh House, 1993:10-20. -

 点击查看大图
点击查看大图
图(5)
计量
- 文章访问数: 5050
- HTML全文浏览量: 1252
- PDF下载量: 172
- 被引次数: 0
