 ISSN
ISSN 


 下载:
下载:
-
OFDM技术由于频谱利用率高、能够有效对抗频率选择性衰落等优点,已被多种无线通信标准采用[1]。然而,OFDM调制信号具有很大的包络变化范围,经过非线性功率放大器后会产生严重的带内失真和带外辐射,造成误码率(BER)性能恶化和邻道干扰。为了满足通信标准中严格限定的性能指标,通常需要对功放进行功率回退,但这样会造成功放效率低下。
常用的提高功放效率的方法是降低OFDM信号的包络起伏以减少功率回退量。PAPR是使用最广泛的描述OFDM信号包络变化的度量[2]。PAPR通过信号的峰值功率来预测信号经过功放后的非线性失真状况。最近,立方度量(CM)引起了广泛关注[3-5]。与PAPR只关注信号的峰值功率不同,CM衡量的是影响信号失真的主要因素——三阶非线性失真[6]。因此CM被认为是比PAPR更准确的信号度量方式,并已被第三代通信系统标准组织采用作为确定功放功率回退量的准则[7]。
到目前为止,多种技术被提出用来降低OFDM信号的PAPR和CM[1-5, 8-13]。这些技术大体可以归纳为无失真技术和基于失真的技术两大类:无失真技术,如部分传输序列[9]和选择性映射[10],通常需要发送边带信息并在接收端借助边带信息对数据符号进行恢复;而基于失真的技术,如限幅滤波[5, 11]和压缩扩展变换[12],则不需要发送边带信息,且具有显著的包络降低性能。文献[13]和文献[8]分别将降低OFDM信号的PAPR和CM建模成凸优化问题,即在满足系统最大允许的误差矢量幅度(error vector magnitude,EVM)约束下最小化信号的PAPR和CM,并分别根据优化模型设计内点法定制方案求解相应的优化问题。优化后EVM不超过最大允许EVMmax,可保证接收端信号满足系统的BER性能要求[13-14]。然而,为获得最优的包络降低性能(或最大功放效率),文献[8]及文献[13]中的算法优化后EVM值总是接近EVMmax,从而导致系统BER性能得不到进一步的改善。另一方面,在实际通信系统中,为满足通信标准严格限定的性能要求,功率回退量必须严格按照信号的CM值来执行[6-7]。换言之,若要保证功率效率不低于某一水平,信号的CM值一定不能超过某一门限。
本文提出了一种新的降低OFDM系统BER及CM值的优化模型,并设计内点法定制方案对此优化问题求解。该算法通过引入失真限制信号CM值不超过预先设立的门限来保证功率效率,并优化失真以进一步改善系统的BER性能。蒙特卡洛仿真证实了算法的有效性。在实际系统中只须根据系统性能需求设立适当的CM门限。本算法相比于文献[8]及[13]在BER及CM性能上均有显著提高。
-
若OFDM系统子载波数为N,频域数据符号表示为$\mathbf{X}={{\left[ {{X}_{0}},{{X}_{1}},\cdots ,{{X}_{N-1}} \right]}^{T}}$。则时域OFDM信号可以表示为[1]:
$${{x}_{n}}=\frac{1}{\sqrt{N}}\sum\limits_{k=0}^{N-1}{{{X}_{k}}}{{\text{e}}^{\text{i}\frac{2\text{ }\!\!\pi\!\!\text{ }kn}{LN}}}\ \ \ n=0,1,\cdots ,LN-1$$ (1) 式中,L是过采样因子。过采样通过补零逆傅里叶变换实现[1-3]。式(1)也可用矩阵形式表示为:
$$x=FX$$ (2) 式中,$x={{\left[ {{x}_{0}},{{x}_{1}},\cdots ,{{x}_{LN-1}} \right]}^{\text{T}}}$;$F\in {{\mathbb{C}}^{LN\times N}}$是逆傅里叶变换矩阵且其中的元素${{F}_{nk}}={}^{{{\text{e}}^{\text{i}2\text{ }\!\!\pi\!\!\text{ }kn/LN}}}\!\!\diagup\!\!{}_{\sqrt{N}}\;$。
由中心极限定理可知,当系统子载波数N较大时,OFDM信号包络服从瑞利分布[1-4]。这说明OFDM信号具有很大的波动性,易受功放非线性影响。因此,当OFDM信号经过功放时,须回退其功率以减小非线性失真。
PAPR是传统的信号波动性度量方法,经常用来确定输入信号的功率回退量。对于输入信号${{x}_{n}}$,PAPR定义为[1-3]:
$$\text{PAPR}=10\log \left\{ \frac{\underset{0\le n\le LN-1}{\mathop{\max }}\,\left[ {{\left| {{x}_{n}} \right|}^{2}} \right]}{{{P}_{0}}} \right\}$$ (3) 式中,${{P}_{0}}=\text{E}\left[ {{\left| {{x}_{n}} \right|}^{2}} \right]$表示信号的平均功率。
文献[6]提出CM用来预测满足失真要求所需的功率回退量。对于输入信号${{x}_{n}}$,CM定义为:
$$\text{CM}=\frac{\text{20log}\left\{ \sqrt{{\text{E}\left[ {{\left| {{x}_{n}} \right|}^{6}} \right]}/{{{(\text{E}\left[ {{\left| {{x}_{n}} \right|}^{2}} \right])}^{3}}}\;} \right\}-\text{RC}{{\text{M}}_{\text{ref}}}}{H}$$ (4) 式中,$\text{20log}\left\{ \sqrt{{\text{E}\left[ {{\left| {{x}_{n}} \right|}^{6}} \right]}/{{{(\operatorname{E}\left[ {{\left| {{x}_{n}} \right|}^{2}} \right])}^{3}}}\;} \right\}$为${{x}_{n}}$的原始立方度量(raw cubic metric,RCM);RCMref为参考信号的RCM;H为经验因子,RCMref和H均为常数。
PAPR是通过信号的峰值功率来确定所需的回退量。CM值由信号的三阶失真功率决定,与信号经过功放后的非线性失真具有更好的相关性。因此,CM能够更加准确的预测功率回退量。
-
通信标准中对带外辐射及带内失真有严格限定。优化过程中通常用空闲子载波满足频谱遮罩的要求来限制带外辐射,用数据子载波的EVM来量化带内失真[8, 13-14]。为简化优化模型,本文将带外辐射假设为零。但值得一提的是,本文提出的优化算法只需加上空载波频谱遮罩的约束条件便能很容易推广到需要限制带外失真的情况。
假设优化后数据符号为$\widehat{\mathbf{X}}$,则EVM定义为[14]:
$$\text{EVM}=\sqrt{\frac{\frac{1}{N}{{\left\| \widehat{\mathbf{X}}-\mathbf{X} \right\|}^{2}}}{{{P}_{0}}}}$$ (5) 式中,$\left\| \cdot \right\|$表示Euclidean范数。因为优化后信号的EVM直接影响系统的BER性能[13],本文将最小化优化信号EVM值作为目标函数。
为保证功率效率,算法中设立CM门限以确保优化后信号的CM值不超过此门限。因为CM定义中RCMref和H均为常数,只需限制优化后信号的RCM值,即:
$$\text{20log}\left\{ \sqrt{{E\left[ {{\left| {{\widehat{x}}_{n}} \right|}^{6}} \right]}/{{{(E\left[ {{\left| {{\widehat{x}}_{n}} \right|}^{2}} \right])}^{3}}}\;} \right\}\le \mu $$ (6) 式中,μ是RCM门限,须根据系统要求设定。
本文算法思想为:引入失真限制信号的CM值不超过设立的门限值,同时最小化信号EVM值以获得此失真条件下的最优BER性能。优化模型为:
$$\underset{\widehat{X}\in {{\mathbb{C}}^{N}},\varepsilon \in \mathbb{R}}{\mathop{\min \varepsilon }}\,$$ (7) $$\text{subject}\text{to: }\widehat{x}\text{= }F\widehat{X}$$ (8) $$|\widehat{X}-X|{{|}^{2}}\le \varepsilon $$ (9) $${\text{E}\left[ {{\left| {{\widehat{x}}_{n}} \right|}^{6}} \right]}/{{{(\text{E}\left[ {{\left| {{\widehat{x}}_{n}} \right|}^{2}} \right])}^{3}}}\;\le {{10}^{{}^{\mu }\!\!\diagup\!\!{}_{10}\;}}$$ (10) 需要注意的是,式(5)中N与P0为常量与优化无关,因此式(9)中ε决定了优化后信号畸变量的大小。式(7)与式(9)使得EVM最小化。式(10)等效于式(6)。
然而,RCM约束不等式(10)是非凸的[8]。要实现式(10)不等式约束,可首先保证RCM公式的分母不减少,即优化后信号的功率不降低:
$$||\widehat{X}|{{|}^{2}}\ge ||X|{{|}^{2}}$$ (11) 展开式(11)可得:
$$\Re ({{\mathbf{X}}^{\text{H}}}(\widehat{\mathbf{X}}-\mathbf{X}))\ge -\frac{1}{2}||\widehat{X}-X|{{|}^{2}}\ge -\frac{\varepsilon }{2}$$ (12) 式中,$\Re (\cdot )$表示实部;${{(\cdot )}^{\text{H}}}$表示共轭转置。式(12)为凸不等式,较式(11)有更大的可行域。最优解在边界上取得,因此可行域的扩大不影响最优值的求解[13]。基于式(12),有:
$${\text{E}\left[ {{\left| {{\widehat{x}}_{n}} \right|}^{6}} \right]}/{{{(\text{E}\left[ {{\left| {{\widehat{x}}_{n}} \right|}^{2}} \right])}^{3}}}\;\le {\text{E}\left[ {{\left| {{\widehat{x}}_{n}} \right|}^{6}} \right]}/{{{P}_{0}}^{3}}\;$$ (13) 因此,可限制$\text{E}\left[ {{\left| {{\widehat{x}}_{n}} \right|}^{6}} \right]$为:
$$\text{E}\left[ {{\left| {{\widehat{x}}_{n}} \right|}^{6}} \right]\le {{10}^{{}^{\mu }\!\!\diagup\!\!{}_{10}\;}}{{P}_{0}}^{3}$$ (14) 式(12)和式(14)联立可严格限制优化信号$\text{RC}{{\text{M}}_{\text{opt}}}\le \mu $。
基于以上分析,优化模型可重新描述为:
$$\underset{\widehat{X}\in {{\mathbb{C}}^{N}},\varepsilon \in \mathbb{R}}{\mathop{\min \varepsilon }}\,$$ (15) $$\text{subject}\text{to: }\widehat{x}\text{= }F\widehat{X}$$ (16) $$||\widehat{X}-X|{{|}^{2}}\le \varepsilon $$ (17) $$\Re ({{\mathbf{X}}^{\text{H}}}(\widehat{\mathbf{X}}-\mathbf{X}))\ge -\frac{\varepsilon }{2}$$ (18) $$\sum\limits_{n=0}^{LN-1}{|{{\widehat{x}}_{n}}{{|}^{6}}}\le {{10}^{{}^{\mu }\!\!\diagup\!\!{}_{10}\;}}{{P}_{0}}^{3}NL$$ (19) -
对于式(15)~式(19)所描述的凸优化问题,可以定制内点法求解。内点法基本步骤可参见文献[15]。
首先,根据凸优化算法要求将复向量及复矩阵表示为等效的实向量及实矩阵。例如,复列向量$S\in {{\mathbb{C}}^{N\times 1}}$扩展成等效的实列向量$\mathbb{S}\in {{\mathbb{R}}^{2N\times 1}}$为:
$$\mathbb{S}={{\left[ \Re ({{S}_{0}}),\Im ({{S}_{0}}),\cdots ,\Re ({{S}_{N-1}}),\Im ({{S}_{N-1}}) \right]}^{\text{T}}}$$ (20) 式中,$\Im (\cdot )$表示取虚部运算。同样,如果要将复矩阵$O\in {{\mathbb{C}}^{M\times N}}$扩展成实矩阵$\mathbb{O}\in {{\mathbb{R}}^{2M\times 2N}}$,则O中元素Oij将被扩展为:
$$\left[ \begin{matrix} \Re ({{O}_{ij}}) & -\Im ({{O}_{ij}}) \\ \Im ({{O}_{ij}}) & \Re ({{O}_{ij}}) \\ \end{matrix} \right]$$ (21) 根据式(20)和式(21),$X\in {{\mathbb{C}}^{N\times 1}}$、$\widehat{X}\in {{\mathbb{C}}^{N\times 1}}$、$\widehat{x}\in {{\mathbb{C}}^{N\times 1}}$和$F\in {{\mathbb{C}}^{LN\times N}}$可分别扩展为$\mathbb{X}\in {{\mathbb{R}}^{2N\times 1}}$、$\widehat{\mathbb{X}}\in {{\mathbb{R}}^{2N\times 1}}$、$\widehat{\mathbb{X}}\in {{\mathbb{R}}^{2N\times 1}}$和$\mathbb{F}\in {{\mathbb{R}}^{2LN\times 2N}}$。
-
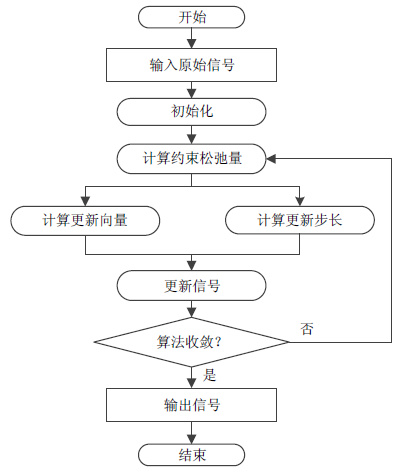
内点法流程如图 1所示,具体计算步骤如下:

图 1 内点法流程图
1) 初始化
初始点$({{\widehat{X}}^{0}}\varepsilon )$必须保证所有约束条件严格可行。对于式(15)~式(19)所描述的凸优化问题,${{\widehat{X}}^{0}}$初始值需要满足式(18)和式(19)的约束条件。可令:
$$\widehat{X}_{k}^{0}=\left\{ \begin{align} & \sqrt{N{{P}_{0}}}k=0 \\ & 0k\in \left[ 1,N-1 \right] \\ \end{align} \right.$$ (22) 此时信号功率不降低,满足式(18)。且对应的时域信号${{\widehat{x}}^{0}}$的RCM值为0 dB,满足式(19)。
为满足式(17)中的EVM约束,基于式(22),令:
$$\varepsilon =1.05||\widehat{X}-X|{{|}^{2}}$$ (23) 式中,1.05是通过仿真得到的经验值。
2) 计算约束松弛量
对于约束条件式(17)~式(19),可得约束松弛量为:
$${{\delta }_{p}}=\varepsilon -||\widehat{X}-X|{{|}^{2}}$$ (24) $${{\delta }_{q}}=\Re ({{X}^{\text{H}}}(\widehat{X}-X))+{}^{\varepsilon }\!\!\diagup\!\!{}_{2}\;$$ (25) $${{\delta }_{t}}={{10}^{{}^{\mu }\!\!\diagup\!\!{}_{10}\;}}{{P}_{0}}^{3}NL-\sum\limits_{n=0}^{LN-1}{{{\left| {{\widehat{x}}_{n}} \right|}^{6}}}$$ (26) 在每一次的迭代过程中,必须保证式(24)~式(26)的数值恒为正数。
3) 计算更新向量
牛顿下降法因其收敛速率快而经常被用来求解凸优化问题[15]。若牛顿下降方向为$(V,{{V}_{\varepsilon }})$,则根据文献[13]有:
$${{V}_{\varepsilon }}\text{=}-1$$ (27) $$\mathbb{H}\mathbb{V}=-\mathbb{G}$$ (28) 式中,$\mathbb{V}\in {{\mathbb{R}}^{2N\times 1}}$是复更新向量$V$按照式(20)扩展得到的实向量;$\mathbb{G}\in {{\mathbb{R}}^{2N\times 1}}$是梯度向量;$\mathbb{H}\in {{\mathbb{R}}^{2N\times 2N}}$是Hessian矩阵。
计算梯度向量$\mathbb{G}$为:
$$\begin{align} & \mathbb{G}=-\frac{{{\partial }^{2}}}{\partial \widehat{\mathbb{X}}\partial \varepsilon }(-\log {{\delta }_{p}}-\log {{\delta }_{q}})= \\ & -\frac{2}{\delta _{p}^{2}}(\widehat{\mathbb{X}}-\mathbb{X})+\frac{1}{2\delta _{q}^{2}}\mathbb{X} \\ \end{align}$$ (29) 计算Hessian矩阵$\mathbb{H}$为:
$$\begin{align} & \mathbb{G}=-\frac{{{\partial }^{2}}}{\partial \widehat{\mathbb{X}}\partial \varepsilon }(-\log {{\delta }_{p}}-\log {{\delta }_{q}})= \\ & {{\mathbb{H}}_{p}}+{{\mathbb{H}}_{q}}+{{\mathbb{H}}_{t}} \\ \end{align}$$ (30) 式中,
$${{\mathbb{H}}_{p}}=\frac{2}{{{\delta }_{p}}}\mathbb{I}+\frac{4}{\delta _{p}^{2}}(\widehat{\mathbb{X}}-\mathbb{X}){{(\widehat{\mathbb{X}}-\mathbb{X})}^{\text{T}}}$$ (31) $${{\mathbb{H}}_{q}}=\frac{1}{\delta _{q}^{2}}\mathbb{X}{{\mathbb{X}}^{\text{T}}}$$ (32) $${{\mathbb{H}}_{t}}=\frac{{{\partial }^{2}}(-\log {{\delta }_{t}})}{\partial {{\widehat{\mathbb{X}}}^{2}}}={{\mathbb{F}}^{\text{T}}}\mathbb{W}\mathbb{F}$$ (33) 在式(31)中,$\mathbb{I}\in {{\mathbb{R}}^{2N\times 2N}}$是单位矩阵$I\in {{\mathbb{R}}^{N\times N}}$按照式(21)得到的扩展矩阵(扩展时其虚部为0)。在式(33)中,$\mathbb{W}\in {{\mathbb{R}}^{2NL\times 2NL}}$定义为:
$$\mathbb{W}=-\frac{{{\partial }^{2}}}{\partial {{\widehat{\mathbb{X}}}^{2}}}\log {{\delta }_{t}}$$ (34) $\mathbb{W}$中元素${{\mathbb{W}}_{ij}}\in {{\mathbb{R}}^{2\times 2}}(i,j\in [0,NL-1])$表示为:
$${{\mathbb{W}}_{ij}}=-\frac{{{\partial }^{2}}(\log {{\delta }_{t}})}{\partial {{\widehat{\mathbb{X}}}_{i}}\partial {{\widehat{\mathbb{X}}}_{j}}}=\frac{1}{\delta _{t}^{2}}\left[ \begin{matrix} {{w}_{ij,11}} & {{w}_{ij,12}} \\ {{w}_{ij,21}} & {{w}_{ij,22}} \\ \end{matrix} \right]$$ (35) 定义${{\tau }_{n}}={{(\Re ({{x}_{n}}))}^{2}}+{{(\Im ({{x}_{n}}))}^{2}}$,$n\in \left[ 0,NL-1 \right]$,则有:
$${{w}_{ij,11}}=\left\{ \begin{array}{*{35}{l}} 6{{\delta }_{t}}\tau _{i}^{2}+24{{\delta }_{t}}{{\tau }_{i}}{{(\Re ({{\widehat{x}}_{i}}))}^{2}}+36\tau _{i}^{4}{{(\Re ({{\widehat{x}}_{i}}))}^{2}} & i=j \\ 36\Re ({{\widehat{x}}_{i}})\Re ({{\widehat{x}}_{j}})\tau _{i}^{2}\tau _{j}^{2} & i\ne j \\ \end{array} \right.$$ (36) $${{w}_{ij,12}}=\left\{ \begin{array}{*{35}{l}} 24{{\delta }_{t}}\Re ({{\widehat{x}}_{i}})\Im ({{\widehat{x}}_{i}}){{\tau }_{i}}+36\tau _{i}^{4}\Re ({{\widehat{x}}_{i}})\Im ({{\widehat{x}}_{i}}) & i=j \\ 36\Re ({{\widehat{x}}_{i}})\Im ({{\widehat{x}}_{j}})\tau _{i}^{2}\tau _{j}^{2} & i\ne j \\ \end{array} \right.$$ (37) $${{w}_{ij,21}}=\left\{ \begin{array}{*{35}{l}} 24{{\delta }_{t}}\Re ({{\widehat{x}}_{i}})\Im ({{\widehat{x}}_{i}}){{\tau }_{i}}+36\tau _{i}^{4}\Re ({{\widehat{x}}_{i}})\Im ({{\widehat{x}}_{i}}) & i=j \\ 36\Im ({{\widehat{x}}_{i}})\Re ({{\widehat{x}}_{j}})\tau _{i}^{2}\tau _{j}^{2} & i\ne j \\ \end{array} \right.$$ (38) $${{w}_{ij,22}}=\left\{ \begin{array}{*{35}{l}} 6{{\delta }_{t}}\tau _{i}^{2}+24{{\delta }_{t}}{{\tau }_{i}}{{(\Im ({{\widehat{x}}_{i}}))}^{2}}+36\tau _{i}^{4}{{(\Im ({{\widehat{x}}_{i}}))}^{2}} & i=j \\ 36\Im ({{\widehat{x}}_{i}})\Im ({{\widehat{x}}_{j}})\tau _{i}^{2}\tau _{j}^{2} & i\ne j \\ \end{array} \right.$$ (39) 最后,根据计算得到的$\mathbb{G}$和$\mathbb{H}$由式(28)可以计算得到更新向量$\mathbb{V}$。与$\mathbb{V}$等效的复更新向量$V$可根据式(20)得到。时域更新向量$v=FV$。
4) 计算更新步长
为使算法加快收敛速率,更新步长应在保证所有约束条件严格可行的原则上越大越好。
若${{\alpha }_{p}}$为满足${{\delta }_{p}}\ge 0$的最大步长,则有:
$${{\left\| \widehat{X}+{{\alpha }_{p}}V-X \right\|}^{2}}\le \varepsilon +{{\alpha }_{p}}{{V}_{\varepsilon }}$$ (40) 求解式(40)可得:
$${{\alpha }_{p}}=\frac{-{{b}_{p}}+\sqrt{b_{p}^{2}+{{\delta }_{p}}{{\left\| V \right\|}^{2}}}}{{{\left\| V \right\|}^{2}}}$$ (41) 式中,${{b}_{p}}=\Re ({{(\widehat{X}-X)}^{\text{H}}}V)+0.5$。
若${{\alpha }_{q}}$为满足${{\delta }_{q}}\ge 0$的最大步长,则有:
$$\Re ({{\mathbf{X}}^{\text{H}}}(\widehat{X}+{{\alpha }_{q}}V-X))\ge -\frac{\varepsilon +{{\alpha }_{q}}{{V}_{\varepsilon }}}{2}$$ (42) 求解式(42)可得:
$${{\alpha }_{q}}=\left\{ \begin{align} & \frac{-{{\delta }_{q}}}{\Re ({{X}^{H}}V)-0.5}\Re ({{X}^{H}}V)<0.5 \\ & \infty 其他 \\ \end{align} \right.$$ (43) 若${{\alpha }_{t}}$为满足${{\delta }_{t}}\ge 0$的最大步长,则有:
$$\frac{1}{NL}\sum\limits_{n=0}^{LN-1}{{{\left| {{\widehat{x}}_{n}}+{{\alpha }_{t}}{{v}_{n}} \right|}^{6}}}\le {{10}^{\frac{\mu }{10}}}{{P}_{0}}^{3}$$ (44) 可收紧不等式,有:
$${{\left| {{\widehat{x}}_{n}}+{{\alpha }_{tn}}{{v}_{n}} \right|}^{6}}\le {{10}^{\frac{\mu }{10}}}{{P}_{0}}^{3}n\in \left[ 0,LN-1 \right]$$ (45) 求解可得:
$${{\alpha }_{tn}}=\frac{-{{b}_{n}}+\sqrt{b_{n}^{2}+{{\left| {{v}_{n}} \right|}^{2}}({{10}^{\frac{\mu }{30}}}{{P}_{0}}-{{\left| {{x}_{n}} \right|}^{2}})}}{{{\left| {{v}_{n}} \right|}^{2}}}$$ (46) 式中,${{b}_{n}}=\Re (x_{n}^{*}{{v}_{n}})$;${{(\cdot )}^{*}}$表示复数共轭。因此,可确定:
$${{\alpha }_{t}}=\min \left\{ {{\alpha }_{t1}},{{\alpha }_{t2}},\cdots ,{{\alpha }_{t(LN-1)}} \right\}$$ (47) 显然,此更新步长可保证式(44)严格可行。
基于以上分析,满足所有约束条件的最大可行步长为:
$${{\alpha }_{\max }}=\min \{{{\alpha }_{p}},{{\alpha }_{q}},{{\alpha }_{t}}\}$$ (48) 为确保算法收敛速率和式(24)~式(26)中所有障碍函数值恒为正数,可选取步长经验值:
$$\alpha =0.95{{\alpha }_{\max }}$$ (49) 5) 更新变量
根据以下两式更新变量:
$$\widehat{X}:=\widehat{X}+\alpha V$$ (50) $$\varepsilon :=\varepsilon +\alpha {{V}_{\varepsilon }}=\varepsilon -\alpha $$ (51) 6) 判别算法是否收敛:若算法收敛,算法终止;否则,返回步骤2),开始新的迭代。判别依据可以通过设立收敛半径或设立最大迭代次数实现[15]。
-
计算复杂度通常通过分析算法所需的浮点运算(加、减、乘、除)次数来评估[8, 13, 15]。优化算法复杂度由迭代次数及每次迭代中的运算量决定。本算法每次迭代中需要计算牛顿下降方向$\mathbb{V}$与更新步长$\alpha $。根据式(29),计算梯度向量$\mathbb{G}$需要8N次实运算,可表示其复杂度为$O(N)$。计算矩阵${{\mathbb{H}}_{p}}$、${{\mathbb{H}}_{q}}$和${{\mathbb{H}}_{t}}$复杂度分别为$O({{N}^{2}})$、$O({{N}^{2}})$和$O({{N}^{2}}+{{N}^{3}})$。因此计算Hessian矩阵$\mathbb{H}$复杂度为$O({{N}^{2}}+{{N}^{3}})$。最后根据式(28)使用Cholesky分解可求得牛顿下降方向$\mathbb{V}$,此计算复杂度为$O({{N}^{3}})$[15]。步长计算中${{\alpha }_{p}}$,${{\alpha }_{q}}$和${{\alpha }_{t}}$复杂度均为$O(N)$。本定制内点法收敛性良好,可在10次迭代内获得全局最优解。
-
本文使用蒙特卡洛仿真评估算法性能。 OFDM系统子载波数设为N=64,调制方式采用正交相移键控(quadrature phase shift keying,QPSK),过采样因子L=4。在仿真中,非线性功率放大器的输入输出关系表示为三阶多项式模型[16]:
$${{y}_{n}}={{x}_{n}}-0.1769x_{n}^{2}x_{n}^{*}$$ (52) 式中,${{x}_{n}}$和${{y}_{n}}$分别为功放的输入及输出信号。此模型是通过拟合真实的固态功率放大器的幅度转换特性得到的。
-
图 2是本文算法在选取不同μ值时优化后RCM的互补累积分布函数(complementary cumulative distribution function,CCDF)曲线。如图所示,当门限值μ分别设为4、5、6dB时,优化后信号的RCM值均被限制在相应的门限值以内,证明了算法降低OFDM信号RCM值的有效性。

图 2 算法RCM降低性能
表 1比较了本文算法和文献[5]中下降限幅滤波算法优化后信号在得到相同RCM值时的EVMopt情况。本文算法设定RCM门限μ=6dB,优化后信号的RCMopt值为6dB;下降限幅滤波算法中通过调整限幅率参数使得优化后信号的RCMopt值同样为6dB。从随机选取的6帧信号的优化结果可以看出,本文算法优化后信号的RCMopt值远低于下降限幅滤波算法,证明了算法优化EVM的有效性。
-
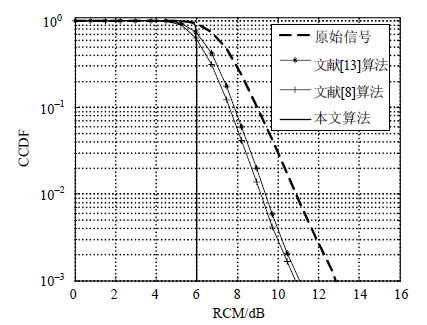
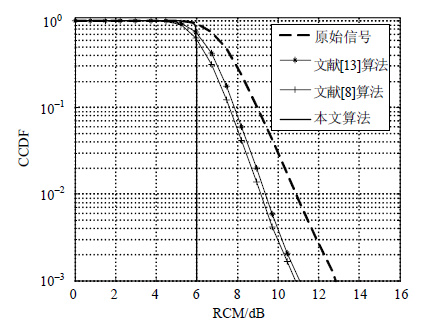
图 3是本文算法、文献[13]中的PAPR优化算法及文献[8]中的CM优化算法的RCM降低性能比较。CM和PARA算法中设定EVMmax为5%,本文算法中设定RCM门限μ = 6 dB。如图 3所示,在CCDF为10-3处,本文算法较CM算法RCM降低了约4.86dB,较PAPR算法降低了约5.08dB。

图 3 RCM降低性能比较
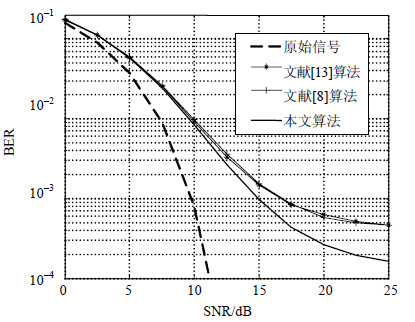
图 4是加性高斯白噪声(additive white Gaussian noise,AWGN)信道下不同算法的BER性能比较。公平起见,仿真中所有算法优化后信号的平均功率均归一化为1。如前文所述,PAPR优化算法及CM优化算法化后信号EVM值总是接近系统允许的EVMmax,因此二者有着近似的BER性能。相反,本算法在CM门限约束下最小化引入的失真,可严格限制信号CM值的同时,进一步改善BER性能。如图 4所示,相比于CM和PARA算法,本算法在BER为10-3时性能增益为1.8dB。

图 4 BER性能比较
-
本文提出了一种新的降低OFDM系统BER及CM值的凸优化模型,在满足信号CM不超过预设门限值的约束下最小化系统带内失真。针对此优化问题设计了内点法定制方案,详细讨论了算法中初始点选择、更新向量、更新步长等计算细节。基于本算法,只须根据实际系统的性能需求设置立方度量门限值,即可在保证功率效率的同时进一步改善系统BER性能。
A Convex Optimization Algorithm for Reducing the Ber and Cubic Metric in OFDM Systems
-
摘要: 相比于功率峰均比(PAPR),立方度量能够更加准确地预测功放的功率回退量,因此被认为是更有效的衡量正交频分复用(OFDM)信号包络变化的度量。为了提高功放效率,常用优化方法是直接最小化信号的立方度量值。然而,这样会引入严重的带内失真,造成系统误码率性能的恶化。该文提出了一种在立方度量值约束下最小化系统带内失真的凸优化模型,并设计了内点法定制方案求解此优化问题。仿真结果显示该算法相比现有优化算法能够显著提高系统误码率及立方度量性能。Abstract: Since cubic metric (CM) can more accurately predict the power de-rating of power amplifier (PA), it is recognized as a better metric to characterize the envelope fluctuations of orthogonal frequency division multiplexing (OFDM) signals than peak-to-average power ratio (PAPR). To improve the PA efficiency, a common scheme is minimizing the CM value of signals. However, this aggravates the in-band distortion, resulting in bit error ratio (BER) degradation of systems. This paper formulates the problem as an in-band distortion optimization subject to CM constraint, and a customized interior-point algorithm is developed to solve the optimization problem. Simulation results show that the proposed algorithm provides better BER and CM-reduction performance than existing optimization schemes.
-
[1] FAZEL K, KAISER S. Multi-carrier and spread spectrum systems:From OFDM and MC-CDMA to LTE and WiMAX[M]. 2nd ed, Chichester, United Kingdom:John Wiley and Sons Limited, 2008. [2] RAHMATALLAH Y, MOHAN S. Peak-to-average power ratio reduction in OFDM systems:a survey and taxonomy[J]. IEEE Communications Surveys & Tutorials, 2013, 15(4):1567-1592. http://cn.bing.com/academic/profile?id=8744f36f32333524ad061c4a16ff1691&encoded=0&v=paper_preview&mkt=zh-cn [3] WUNDER G, FISCHER R F H, BOCHE H, et al. The PAPR problem in OFDM transmission:New directions for a long-lasting problem[J]. IEEE Signal Processing Magazine, 2013, 30(6):130-144. doi: 10.1109/MSP.2012.2218138 [4] DEUMAL M, BEHRAVAN A, PIJOAN J L. On cubic metric reduction in OFDM systems by tone reservation[J]. IEEE Transactions on Communications, 2011, 59(6):1612-1620. doi: 10.1109/TCOMM.2011.042111.070613 [5] ZHU Xiao-dong, HU Hai-chao, TANG You-xi. Descendent clipping and filtering for cubic metric reduction in OFDM systems[J]. Electronic Letters, 2013, 49(9):599-600. doi: 10.1049/el.2012.4350 [6] Motorola. Comparison of PAR and cubic metric for power de-rating, Tdoc R1-040522[R]. Montreal, Canada:3GPP TSG RAN, 2004. [7] Motorola. Cubic metric in 3GPP-LTE.3GPP TSG RAN WG1 LTE Adhoc, Tdoc R1-060023[R]. Helsinki, Finland:[s.n.], 2006. [8] ZHU Xiao-dong, HU Hai-chao, MENG Zhong-lou, et al. On minimizing the cubic metric of OFDM signals using Convex optimization[J]. IEEE Transactions on Broadcasting, 2014, 60(3):511-523. doi: 10.1109/TBC.2014.2339534 [9] HOU Jun, GE Jian-hua, LI Jing. Peak-to-average power ratio reduction of OFDM signals using PTS scheme with low computational complexity[J]. IEEE Transactions on Broadcasting, 2011, 57(1):143-148. doi: 10.1109/TBC.2010.2079691 [10] IRUKULAPATI N V, CHAKKA V K, JAIN A. SLM based PAPR reduction of OFDM signal using new phase sequence[J]. Electronic Letters, 2009, 45(24):1231-1232. doi: 10.1049/el.2009.1902 [11] WANG Yong-chao, LUO Zhi-quan. Optimized iterative clipping and filtering for PAPR reduction of OFDM signals[J]. IEEE Transactions on Communications, 2011, 59(1):33-37. doi: 10.1109/TCOMM.2010.102910.090040 [12] JIANG Tao, YAO Wen-bing, GUO Peng, et al. Two novel nonlinear companding schemes with iterative receiver to reduce PAPR in multicarrier modulation systems[J]. IEEE Transactions on Broadcasting, 2006, 56(2):268-273. http://cn.bing.com/academic/profile?id=1b5d15fee8b6d525c574b54e1b7001c6&encoded=0&v=paper_preview&mkt=zh-cn [13] AGGARWAL A, MENG T H. Minimizing the peak-toaverage power ratio of OFDM signals using convex optimization[J]. IEEE Transactions on Signal Processing, 2006, 54(8):3099-3110. doi: 10.1109/TSP.2006.875390 [14] 3GPP. Base station (BS) radio transmission and reception:36.104 V8.10.0[S].[S.l.]:Technical Standard, 2010. [15] BOYD S, VANDENBERGHE L. Convex optimization[M]. Cambridge, United Kingdom:Cambridge University Press, 2004. [16] AL-DALAKTA E, AL-DWEIK A, HAZMI A, et al. Efficient BER reduction technique for nonlinear OFDM transmission using distortion prediction[J]. IEEE Transactions on Vehicular Technology, 2012, 61(5):2330-2336. doi: 10.1109/TVT.2012.2190950 -

 点击查看大图
点击查看大图
图(4) / 表(1)
计量
- 文章访问数: 4385
- HTML全文浏览量: 1339
- PDF下载量: 48
- 被引次数: 0
