 ISSN
ISSN 


 下载:
下载:

-
混沌理论是非线性科学中最重要的研究方向之一,作为其中的经典模型,Duffing振子被广泛应用于信号检测、盲源分离、流体结构分析和非线性控制等领域[1-3]。Duffing振子弱信号检测的机理来源于混沌控制,将待测信号作为系统的周期扰动,即使信号幅值很小,系统也会发生本质的相态跃迁。但是,系统并不是对周期信号唯一敏感的,一定强度的噪声驱动也会导致Duffing振子发生相态跃迁,进而降低检测系统的可靠性,这也是多年来制约混沌检测方法在实际工程应用中的重要原因之一[4-5]。
对于这种问题,国内外学者进行了大量研究,文献[6]明确指出,Duffing振子的临界态和大尺度周期态都具有一定的敏感性,输入端驱动白噪声的强度对系统相态的跃迁行为具有重要影响。为了更好地量化分析这种影响,诸多学者给出了自己的研究思路和改进方法:文献[7]结合人工神经网络方法分析了强噪声背景下目标小信号的提取,但其噪声背景严格限定于混沌干扰范畴;随后,文献[8]采用混沌状态的主动控制实现了微波信号测量,但比例微分控制方式需要持续不间断的参数反馈,实现难度较高;文献[9]结合系统参数的设置提出了一种可检测断续谐波信号频率的变阻尼混沌系统;文献[10]分析了检测系统灵敏度,噪声免疫性与振子参数选取之间的关系,提出了一种含五阶非线性恢复力项的L-Y改进模型;文献[11]对系统模型的状态差异及能量分布特性进行研究,提出了基于哈密顿量的弱信号参数辨识方法;文献[12]对混沌振子临界态的突变性、保持性和容噪性进行研究,提出了调整参数的随机共振检测方法;文献[13]结合通信、雷达等领域复信号的接收需求,建立了复数域的新型混沌振子。这些研究成果仍然基于经典Duffing振子,着眼于系统参数的修正优化,对检测性能的改进有限,并未从根本上解决噪声的影响问题。因此,本文将寻求建立一种新的混沌模型以替代现有的Duffing系统,从而降低噪声对相态跃迁的影响,提高弱信号检测算法的可靠性。
本文对一种包含强非线性阻尼项的广义Van der Pol振子进行研究,在非线性动力学范畴内证明了系统极限环的有界稳定存在,可满足弱信号检测的建模要求。在此基础上对新系统的可检测性进行验证,并从相态稳定性、算法复杂度、检测性能3个方面与经典Duffing振子进行对比分析。经过仿真验证,新模型的应用可以有效降低噪声对相态跃迁造成的影响,为混沌检测算法在实际工程中的应用提供理论依据。
-
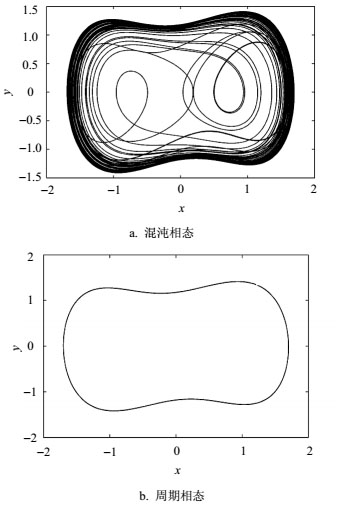
传统混沌检测方法来源于系统策动力强度的变化。首先设置系统处于临界状态,如图 1a所示,此时外加周期激励的输入将会使系统发生本质性的相态跃迁,如图 1b所示。但是,大量研究结果已经表明[7-13],一定强度的噪声也会使系统发生这种变化。噪声对相态跃迁的重要影响,在一定程度上导致了系统无法准确实现信号的可靠检测。

图 1 混沌检测模型的相态变化
为了提高混沌检测模型的稳健性,可从以下3个方面进行分析并改进:1) 系统状态的稳定性,尤其是刚刚渡过临界状态的周期态,其稳定程度直接决定了已有方法能否准确判断相态跃迁现象的发生;2) 对噪声的免疫性,即系统可以从更强的噪声背景中有效提取出弱信号及其特征参量;3) 系统复杂度,混沌检测的实现本质上是一个高数据量的参数迭代过程,单次系统相变所需的激励量可达104量级甚至更高,数据利用率很低。
根据以上分析,本文引入一种包含三阶非线性阻尼项的自激振荡系统代替现有的Holmes-Duffing模型。新模型的引入在保证算法复杂度无明显增加的前提下,有效提升系统相态的稳定性和噪声免疫性。下面,首先对新模型用于信号检测的可行性及约束条件进行分析。
-
广义Van der Pol振子是一个具有强非线性阻尼项的微分方程,在振动分析等领域中占据着重要位置,代表了一类典型的数学问题。其与经典Duffing系统的区别主要在于系统自激振荡力的引入,方程的一般形式为:
$$\ddot x(t) - \delta [1 - {x^2}(t)]\dot x(t) + \sum\limits_{i = 0} {{\alpha _i}{x^{2i + 1}}(t)} = 0$$ (1) 式中, $\dot x\left( t \right),\ddot x\left( t \right)$ 分别表示系统输出x(t) 对时间尺度t的一阶和二阶导数; $\delta \left[ {1 - {x^2}\left( t \right)} \right]\dot x\left( t \right)$ 为方程的非线性阻尼项; $\sum\limits_{i = 0} {{\alpha _i}} {x^{2i + 1}}\left( t \right)$ 为方程的恢复力项,当i=1时,其形式为α1x(t)+a2x3(t), αi>0。
引入变量y(t),并令:
$$y(t) = \dot x(t)$$ (2) 则由式 (1) 可得:
$$\begin{array}{l} \quad \quad \quad \quad \;\dot y(t) = \ddot x(t) = \\ \delta [1 - {x^2}(t)]\dot x(t) - [{\alpha _1}x(t) + {\alpha _2}{x^3}(t)] \end{array}$$ (3) 综合式 (2) 和式 (3),可得系统积分曲线方程为:
$$\begin{array}{l} \quad \quad \quad \quad \;f(x,y) = \frac{{\dot y(t)}}{{\dot x(t)}} = \\ \frac{{\delta [1 - {x^2}(t)]\dot x(t) - [{\alpha _1}x(t) + {\alpha _2}{x^3}(t)]}}{{y(t)}} \end{array}$$ (4) 连续时间系统中,有x=x(t),y=y(t)。并且在区域 $G\left\{ {\left( {x,y} \right) - \infty < x < \infty ,y < 0} \right\}$ 上,f(x, y) 连续且满足局部Lipschitz条件[14]。
令f(x, y)=0,得到其水平等倾线:
$$Q(x,y) = - ({\alpha _1}x + {\alpha _2}{x^3}) + \delta (1 - {x^2})y = 0$$ (5) 其解曲线方程为:
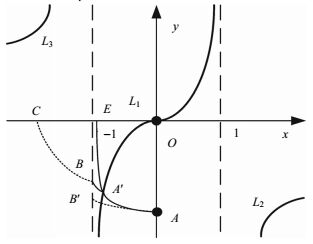
$$y = \frac{{{\alpha _1}x\left( {1 + \frac{{{\alpha _2}}}{{{\alpha _1}}}{x^2}} \right)}}{{\delta \left( {1 - {x^2}} \right)}}$$ (6) 分别记作Li(i=1, 2, 3),如图 2所示。

图 2 广义Van der Pol振子的解曲线
由增量法可知,在L1与L2之间,Q(x, y)<0;在L1与L3之间,Q(x, y)>0,下面开始构造适合系统 (3) 的覆盖环域W。
首先,系统 (3) 存在唯一的奇点O(0, 0),当δ > 0时,0为不稳定结点,将其邻域 $\left[ {\hat N\left( {\mathit{0},r} \right),r \to 0} \right]$ 作为环域W的内边沿线Lin。然后,以第三象限为例构造环域W的外边沿线Lex。任取点A(0, y0),y0<0作为初值点,分两个区域对外边沿线的存在进行证明。
1) 变量x的存在区域G1:x∈[-1, 0]。此时解曲线的表达式为:
$$f(x,y) = \frac{{ - ({\alpha _1}x + {\alpha _2}{x^3})}}{y} + \delta (1 - {x^2}) > 0$$ (7) 独立分析f(x, y) 的构成,可得恢复力项部分为:
$$\frac{{ - {\alpha _1}x\left( {1 + \frac{{{\alpha _2}}}{{{\alpha _1}}}{x^2}} \right)}}{y} < 0$$ (8) 阻尼项部分为:
$$\delta (1 - {x^2}) > 0$$ (9) 此时,建立类比方程:
$$\tilde f(x,y) = \delta (1 - {x^2}) > f(x,y)$$ (10) $\tilde f\left( {x,y} \right)$ 的常微分方程形式为:
$$y = \frac{{{\alpha _1}x\left( {1 + \frac{{{\alpha _2}}}{{{\alpha _1}}}{x^2}} \right)}}{{\delta \left( {1 - {x^2}} \right)}}$$ (11) 由以上分析可知,原解曲线方程与类比方程的解y(x) 和 $\tilde y\left( x \right)$ 均存在于变量区间G1内,并且常微分方程f(x, y) 与 $\tilde f\left( {x,y} \right)$ 均在R×R内连续并满足局部Lipschitz条件。
根据Cauchy比较定理[15]得知,
$$\tilde y(x) \le y(x),{\rm{ }}x \in {G_1}$$ (12) 进一步,对式 (11) 求解,得:
$$\tilde y(x) = \delta \left( {x - \frac{1}{3}{x^3}} \right) + C$$ (13) 式中,C=y0;其解曲线 $\tilde y\left( x \right)$ 与x=-1的交点为 $B'\left( { - 1, - \frac{2}{3}\delta + {y_0}} \right)$ 。因而, $\tilde y\left( x \right)$ 也必定与L1相交于一点A'。
2) 变量x的存在区域 ${G_2}:x \in \left[ { - \infty ,L_A^ - \left( \kappa \right)} \right]$ ,其中LA-表示经过A点的解曲线, $L_A^ - \left( \kappa \right)$ 为曲线LA-上的一点,并且 $\kappa \in \left( { - 1,0} \right)$ ,在此区间上,系统 (3) 的解曲线表达式为:
$$f(x,y) = \frac{{{\alpha _1}x + {\alpha _2}{x^3}}}{y} + \delta (1 - {x^2}) < 0$$ (14) 至此,解曲线的存在两种可能:P1:解曲线y(x) 与{y=0,x<0}相交于点E;P2解曲线y(x) 与{y,x=-1}交于点B(-1,y2),且 $ - \frac{2}{3}\delta + {y_0} < {y_2} < 0$ 。
如果假设P1成立,则可得环域W在第三象限的外边沿线为 ${{L}_{\rm{ex}}}=\overset\frown{A{A}'}\bigcup \overset\frown{{A}'E}$ ,否则,假设P2成立,外边沿线为 ${{L}_{\text{ex}}}=\overset\frown{A{A}'}\bigcup \overset\frown{{A}'C}$ 。至此可以证明,系统 (3) 的解曲线在实数域内存在唯一的稳定极限环。
根据分析可以得出,广义Van der Pol振子可用作弱信号混沌检测模型。与经典混沌检测系统相同,在式 (3) 中引入代换变量 $y\left( t \right) = \omega \dot x\left( t \right)$ ,即可实现任意频率弱信号的检测[16]。
-
当前深空遥测、精密仪器制造、故障检修等高技术领域[17],对于低信噪比信号的检测需求非常突出,准确提取出弱信号及其参数具有重要意义。
-
实验硬件环境为:计算机处理器Intel (R) Core (Pentium);软件环境为:Windows7操作系统,Matlab仿真软件。
系统模型设定为广义Van der Pol振子,内置周期策动力为角频率为ω的谐波信号。实验中所添加的噪声均为零均值高斯白噪声,系统初始位置设定为[X0, Y0]=[0, 0]。为计算简便,刚性阻尼系数取δ=1,系统恢复力项系数α1=0.1,α2=1。考虑到实验分析中数值精度和仿真时长的影响,采用二阶EM (Euler-Maruyama) 算法对系统进行建模解算。
-
1) 稳定性。系统相态的稳定性对于实现相态跃迁的有效判别,提高混沌检测算法的准确性非常重要[12, 14]。首先对本文模型与Duffing振子的相态稳定性进行比较,调整系统策动力,使两种系统均刚刚越过临界态进入稳定周期相态,利用噪声发生器输入驱动高斯白噪声,此时,系统输出序列x的幅值也将会发生微妙的变化,本文对这种变化进行量化分析,进而判定系统相态的稳定性。假设系统周期状态下的输出为xp(t),加入噪声后的系统输出变化为 ${{x'}_p}\left( t \right)$ ,定义两者的二阶均方差期望[10]作为系统状态稳定性的衡量标准:
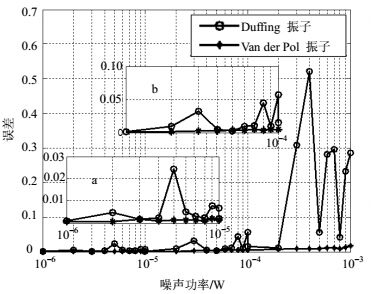
$${\Lambda _{{\rm{wave}}}} = {\rm{E}}[{({{x'}_p}(t) - {x_p}(t))^2}]$$ (15) 图 3给出了两种模型的波动方差随噪声功率增加的变化曲线。由仿真结果可以看出,两种模型的周期相态都具有一定的稳定性,但也存在明显差异。有:1) 噪声功率位于10-6~10-5W时,除个别噪声功率值外,两种模型的波动方差相差不大,二者的相态稳定性相当,如图 3a;2) 进一步增加噪声功率,Duffing振子的波动方差也随之增加,二者的相态稳定性开始出现较大差距,如图 3b;3) 继续增加噪声功率,Duffing振子的波动方差急剧变化,而本文模型仍旧保持了很强的稳定性,其中,噪声功率为4.0×10-4W时,Duffing振子输出x幅值的波动方差为0.54,而本文模型的波动方差值为0.01,仅是前者的1/54。

图 3 两种振子随噪声功率变化的幅值变化
经过以上实验分析,得出:在不同强度噪声下,本文模型的相态稳定性均强于经典Duffing振子,尤其是强噪声条件下,该模型相态稳定性和噪声免疫性的优势更加明显,也更加适合弱信号检测的需求。
2) 复杂度。广义Van der Pol振子是一个非线性微分方程,无法得到其精确解析解,只能采用EM等数值分析方法对其进行求解。因此,本节对两种模型的复杂度进行比较时,以数值分析方法中实数加法和乘法次数为标准。
对于式 (3) 所示的本文模型,其单次迭代运算过程中乘法次数为:C1,mul=5+i(i+1),加法次数为:C1,add=4+i,总的运算复杂度可表示为: ${C_{{\rm{Van}}}} = \left\{ {\left[ {5 + i\left( {i + 1} \right)} \right]M + \left( {4 + i} \right)L} \right\}N$ ,其中M代表乘法,L代表加法,N代表迭代次数。
此时,Duffing振子的运算复杂度为 ${C_{{\rm{Duf}}}} = \left( {5M + 4L} \right)N$ ,可得运算复杂度的增加量为:
$$B = \frac{{{C_{{\rm{Van}}}} - {C_{{\rm{Duf}}}}}}{{{C_{{\rm{Duf}}}}}} = \frac{{i(i + 1)M + iL}}{{5M + 4L}}{\rm{ }}i{\rm{ = 0,1,}} \cdots $$ (16) 因而当i=1时,本文模型即为三阶广义Van der Pol振子,其运算复杂度增加为2(M+L)N,主要体现在非线性阻尼项上。其中,乘法和加法运算次数的增加量分别为:Bmul=0.6,Badd=0.25,即本文模型与Duffing振子的运算复杂度为同一量级。
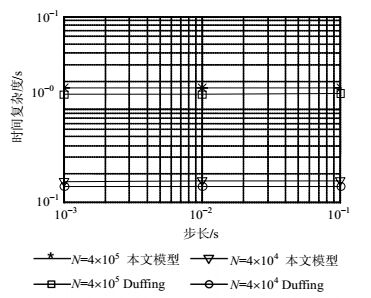
图 4给出了本文模型与Holmes-Duffing振子的时间复杂度实验对比结果。

图 4 两种振子的时间复杂度对比图
由仿真结果可以看出,混沌模型复杂度的改变主要体现在高数据量的迭代次数N上,其迭代次数的绝对值一般达到104量级甚至更高。当迭代次数N=4×104时,步长h=10-2s时,经典模型的运算时间为1.4×10-1s,本文模型的运算时间为1.6×10-1s,其运算复杂度约为Duffing振子的1.16倍;迭代次数增加到N=4×105时,步长h=10-1s时,经典模型的运算时间为1.5s,本文模型的运算时间为1.7s,其运算复杂度约为Duffing振子的1.13倍。因此,实验结果与理论分析均可以证实,与经典Duffing振子模型相比,本文模型的运算复杂度虽有一定增加,但并没有数量级的提高。
3) 检测性能。采用新模型对弱信号检测的可靠性进行检验,调整周期策动力强度使系统处于临界状态。待测信号为谐波信号,表示式为 $A\cos \left( {\omega t} \right) + \eta \left( t \right)$ ,其中η(t) 为高斯白噪声,A为待测信号的幅值,实验中信号幅值为服从[0.001, 0.01]之间均匀分布的105个随机数,信号频率ω=10 rad/s。待测信号的信噪比定义为:
$${\rm{SNR}} = 10 \times \lg (\psi _s^2/\psi _n^2)$$ (17) 式中, $\psi _s^2$ 辨识有用信号的功率值; $\psi _n^2$ 表示背景噪声的功率值。SNR范围为-35~0dB。注入第j个待测信号后,若系统进入周期状态,则记Np, j=1;否则,系统仍驻留在混沌状态,则记Nc, j=1。单个信噪比点对应的统计差错概率为:
$${T_X}(i) = \frac{{\sum {{N_{C,j}}} }}{{\sum {{N_{C,j}}} + \sum {{N_{P,j}}} }}$$ (18) 式中, $j = 1,2, \cdots ,{10^5}$ ,代表全部待测信号。另外,对应于SNR范围-35~0dB,可设定 $i = 0,1, \cdots ,35$ 。
在每个信噪比点上进行100次蒙特卡洛实验,并计算系统的平均差错概率为:
$${{\bar T}_{X,i}} = \frac{1}{N}\sum\limits_{k = 1}^M {{T_X}(i)} $$ (19) 式中,M=100。图 5给出了两种模型的检测结果对比。

图 5 广义Van der Pol模型的检测差错概率
对比相同差错概率条件下两者的性能差异,定义其信噪比增益如下:
$$\Delta {\rm{SNR = }}\left| {{\rm{SN}}{{\rm{R}}_V} - {\rm{SN}}{{\rm{R}}_D}} \right|$$ (20) 式中,SNRD为某一固定差错概率值下,Duffing振子对应的信噪比;SNRV为本文模型对应的信噪比。分析图 5中的仿真结果,当输入信噪比为-35~-26dB时,两种模型的检测差错概率波动范围集中于10-4~10-2之间的量级。其参考线为Holmes-Duffing振子取得3dB信噪比增益的假设曲线。
根据图 5的实验结果,可以发现本文模型的检测差错概率始终在3dB参考线的下方。其中,当信号检测平均差错概率为5.0×10-3时,Duffing振子对应的信噪比约为-28dB,而文中模型为-33dB,其信噪比增益为5dB;当检测差错概率为5.0×10-4时,Duffing振子对应的信噪比为-24dB,而文中模型约为-27dB,其信噪比增益为3dB。实验结果表明,当两者的检测差错概率均位于10-4~10-2之间时,本文模型可获得至少约3dB的信噪比增益。
随着输入信噪比的增加,新模型的可靠性提升程度相比传统Duffing模型更加显著,当输入信噪比为-15dB时,Duffing模型的检测差错概率为2.3×10-4,而新模型的检测差错概率为2.1×10-5,新模型的应用使混沌检测算法的检测差错概率降低了一个数量级。
综合上述分析可知,新模型的应用可以有效降低噪声对系统相态跃迁的影响,在算法复杂度并未明显增加的前提下,提高了混沌检测算法的可靠性,对混沌理论的实际工程应用具有较好的实用价值。
-
本文提出了一种基于广义Van der Pol振子的混沌检测模型,并从理论上证明了新模型存在一个稳定的极限环,可用于弱信号检测,通过实验分析可知新模型可用于深空探测、遥感控制等领域的微弱信号检测。实验表明,该模型可实现随机幅值的谐波信号检测,相对于传统Duffing检测模型,可以有效降低噪声对相态跃迁的影响,提高信号检测的可靠性。
Analysis on Noise Immunity of Chaotic Detection System and Robustness Modeling Approach
-
摘要: 噪声是影响Duffing振子相态跃迁的重要因素,其结果导致Duffing检测可靠性降低,从而影响其在实际工程中的应用。为此,提出了一种含强非线性阻尼项的广义Van der Pol振子相态跃迁模型,从理论上证明了其用于弱信号检测的可行性。与经典Duffing振子相比,新模型具有更强的状态稳定性和噪声免疫性。仿真实验表明,基于新模型的检测方法可以有效降低噪声对相态跃迁的影响,改善弱信号检测的可靠性。
-
关键词:
- 广义Van der Pol振子 /
- 非线性阻尼项 /
- 相态跃迁 /
- 弱信号检测
Abstract: Recent studies suggest that noise could cause the occurrence of Duffing oscillator's phase-state transition, which is one of the most important reasons for the low system detection reliability and has been restricting the application of chaos theory in practical engineering. And hence one novel detection model containing nonlinear damping term is proposed in the paper based on generalized Van der Pol oscillator. And then it is proved feasible for weak signal detection by theoretical analyses. Compared to classical chaotic oscillators, the new model has stronger state robustness and noise immunity with equal complexity. Finally, Simulation results show that the application of the new model can reduce the impacts of noise on the phase-state transition and improve the detection reliability of weak signals. -
[1] GUI-TIAN H, MAO K L. Dynamic behavior of fractional order Duffing chaotic system and its synchronization via singly active contro[J]. Applied Mathematics And Mechanics, 2012, 33(5): 567-582. doi: 10.1007/s10483-012-1571-6 [2] ALEX E. Analytical solution of the damped Helmholtz– Duffing equation[J]. Applied Mathematics Letters, 2012(25): 2349-2353. https://www.researchgate.net/publication/257294275_Analytical_solution_of_the_damped_Helmholtz-Duffing_equation [3] LI Y, YANG B. Chaotic system for the detection of periodic signals under the background of strong noise[J]. Chinese Science Bulletin, 2003, 48(5): 508-512. doi: 10.1007/BF03183261 [4] 盛广铭, 马德保.微弱直接序列扩频信号Duffing振子检测方法研究[J].电子科技大学学报, 2012, 41(5): 693-696. http://www.juestc.uestc.edu.cn/CN/abstract/abstract1424.shtml SHENG Guang-ming, MA De-bao. Method for weak DSSS signal detecter based on Duffing oscillator[J]. Journal of University of Electronic Science and Technology of China, 2012, 41(5): 693-696. http://www.juestc.uestc.edu.cn/CN/abstract/abstract1424.shtml [5] WANG Y Q, WU Q. Analytical and numerical studies for chaotic dynamics of a duffing oscillator with a parametric force[J]. Communications, 2007, 48(3): 477-480. http://www.wenkuxiazai.com/doc/d7ad75d38bd63186bcebbc7a.html [6] 王永生, 姜文志, 赵建军, 等.一种Duffing弱信号检测新方法及仿真研究[J].物理学报, 2008, 57(4): 2053-2059. doi: 10.7498/aps.57.2053 WANG Yong-sheng, JIANG Wen-zhi, ZHAO Jian-jun, et al. Weak period signal detection through Duffing oscillator by considering noise effect[J]. Acta Physica Sinica, 2008, 57(4): 2053-2059. doi: 10.7498/aps.57.2053 [7] HAYKIN L. Detection and estimation using an adaptive rational function filter[J]. IEEE Transactions on Signal Processing, 1994, 42(12): 3366-3376. doi: 10.1109/78.340773 [8] CHANCE M G, SCOTT H. Weak signal detection by small-perturbation conteol of chaotic orbits[J]. IEEE MTT-S Digest, 1996, 3(3): 1883-1886. https://www.researchgate.net/publication/224538241_Weak_signal_detection_by_small-perturbation_control_of_chaotic_orbits [9] 韩建群.一种减小Duffing系统可检测断续正弦信号频率范围的方法[J].电子学报, 2013, 41(4): 733-738. http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201304017.htm HAN Jian-qun. A method of narrowing frequency range of intermittent sine signal detected by Duffing system[J]. Acta Electronica Sinica, 2013, 41(4): 733-738. http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201304017.htm [10] 刘海波, 吴德伟, 金伟, 等. Duffing振子微弱信号检测方法研究[J].物理学报, 2013, 62(5): 42-47. http://cdmd.cnki.com.cn/Article/CDMD-10056-1016108734.htm LIU Hai-bo, WU De-wei, JIN Wei, et al. Study on weak signal detection method with Duffing oscillators[J]. Acta Physica Sinica, 2013, 62(5): 42-47. http://cdmd.cnki.com.cn/Article/CDMD-10056-1016108734.htm [11] 魏恒东, 甘露, 李立萍.基于哈密顿量的Duffing振子微弱信号检测[J].电子科技大学学报, 2012, 41(2): 203-207. http://www.juestc.uestc.edu.cn/CN/abstract/abstract723.shtml WEI Heng-dong, GAN Lu, LI Li-ping. Weak signal detection by Duffing oscillator based on Hamiltonian[J]. Journal of University of Electronic Science and Technology of China, 2012, 41(2): 203-207. http://www.juestc.uestc.edu.cn/CN/abstract/abstract723.shtml [12] 范剑, 赵文礼, 王万强.基于Duffing振子的微弱周期信号混沌检测性能研究[J].物理学报, 2013, 45(1): 1-7. doi: 10.6038/cjg20130101 FAN Jian, ZHAO Wen-li, WANG Wan-qiang. Study on the weak sinusoidal signal detection property using Duffing chaos system[J]. Acta Physica Sinica, 2013, 45(1): 1-7. doi: 10.6038/cjg20130101 [13] 邓小英, 刘海波, 龙腾.一个用于检测微弱复信号的新Duffing型复混沌振子[J].科学通报, 2012, 57(13): 1176-1182. http://www.cnki.com.cn/Article/CJFDTOTAL-KXTB201213016.htm DENG Xiao-ying, LIU Hai-bo, LONG Teng. A new complex Duffing oscillator used in complex signal detection[J]. China Science Bulletin, 2012, 57(13): 1176-1182. http://www.cnki.com.cn/Article/CJFDTOTAL-KXTB201213016.htm [14] 马知恩, 周义仓.常微分方程定性与稳定性方法[M].北京:科学出版社, 2001. MA Zhi-en, ZHOU Yi-cang. Stability and quality analysis of nonlinear differential equation[M]. Beijing: Science Publication, 2001. [15] LEUNG H, HAYKIN S. Detection and estimation using an adaptive rational function filter[J]. IEEE Transactions on Signal Processing, 1994, 42(12): 3366-3376. doi: 10.1109/78.340773 [16] 李国军, 曾孝平, 周晓娜, 等.基于随机共振的微弱高频CW信号检测技术研究[J].电子科技大学学报, 2010, 39(5): 737-741. http://www.juestc.uestc.edu.cn/CN/abstract/abstract1187.shtml LI Guo-jun, ZENG Xiao-ping, ZHOU Xiao-na, et al. Detection technique based on stochastic resonance for weak high-frequency CW signal[J]. Journal of University of Electronic Science and Technology of China, 2010, 39(5): 737-741. http://www.juestc.uestc.edu.cn/CN/abstract/abstract1187.shtml [17] RAD J A, KAZEM S, PARAND K. A numerical solution of the nonlinear controlled Duffing oscillator by radial basis functions[J]. Computers and Mathematics with Applications, 2012, 64(6): 2049-2065. doi: 10.1016/j.camwa.2012.03.104 -

 点击查看大图
点击查看大图
图(5)
计量
- 文章访问数: 3799
- HTML全文浏览量: 1247
- PDF下载量: 218
- 被引次数: 0
