 ISSN
ISSN 



-
同时同频全双工收发信机能够在同一频段上同时收发数据,与传统的时分双工、频分双工收发信机相比,信道容量及频谱利用率更高[1-2]。因此,同时同频全双工技术成为下一代移动通信技术(5G)的研究热点[3]。然而,在全双工传输模式的收发信机中,接收信号受本地发送信号的大功率干扰[4]。由于模数转换器(analog to digital converter, ADC)的动态范围限制,若接收的自干扰信号功率过高,远端期望信号便会淹没在ADC的量化噪声里[4]。因此,同时同频全双工接收机必须在射频域对接收的大功率自干扰信号进行抑制。
根据射频自干扰重建信号的馈入方式,已有的全双工射频自干扰抵消技术可分为两类:数字辅助射频自干扰抵消和直接耦合射频自干扰抵消。数字辅助射频自干扰抵消技术的基本思想在于:结合自干扰信道估计值在基带处理单元重建自干扰信号,然后经过一条独立的射频通道将基带重建信号上变频到射频域作为射频自干扰重建信号,最后将射频自干扰重建信号从接收射频信号中减去[5-7]。文献[5]考虑一发一收的窄带通信系统,给出了基本的数字辅助射频自干扰抵消结构,并通过实验验证了其有效性。文献[6]考虑两发一收的宽带正交频分复用(orthogonal frequency division multiplexing, OFDM)通信系统,分别对各子载波参考信号进行信道补偿得到各子载波对应的重建自干扰,然后经过傅里叶反变换(inverse fast Fourier transform, IFFT)产生时域的基带重建自干扰。文献[7]将文献[6]的解决思路应用于多天线的宽带OFDM系统上。综上,数字辅助的射频自干扰抵消结构容易实现,但由于该结构中射频重建自干扰是通过额外的一条射频通道产生,不能抵消原发射射频通道产生的自干扰非线性分量。
直接耦合射频自干扰抵消技术从全双工收发信机的发射端直接耦合出一路射频参考信号,通过对射频参考信号和接收射频信号进行相应的处理,实现射频域的自干扰抵消。因而,它可以同时抵消自干扰信号的线性和非线性分量。具体地,该类方法可分为盲自干扰抵消以及基于信道估计的自干扰抵消两类。其中盲自干扰抵消无需参考信号的幅度、相位对射频干扰进行搜索,但由于其没有利用自干扰信道的信息,使得自干扰抵消性能不佳[8]。基于信道估计的自干扰抵消方法则通过对射频参考信号的时延、幅度以及相位进行估计和调整,得到射频重建自干扰并在接收射频信号中减去。文献[9-10]假设单径自干扰信道场景,分别采用QHX220芯片[9],以及两抽头射频自干扰重建结构[10]产生射频域的重建自干扰,通过固定步长搜索最优的重建自干扰幅度和相位值。文献[11-12]则分别考虑单径和多径自干扰场景,对自干扰重建结构中各抽头的权矢量进行自适应的搜索,该搜索方法的收敛速度优于固定步长搜索算法[13]。但上述自适应搜索方法的收敛速度性能受自干扰抑制性能制约[11-12],对自干扰抑制性能要求较高时,会导致收敛速度变慢。
为解决以上问题,本文提出一种应用于同时同频全双工系统的射频快速自适应干扰抵消技术,与现有的射频自适应干扰抵消方法相比,在不恶化干扰抑制性能的前提下提高收敛速度。考虑单径无线自干扰信道场景,首先分析了自干扰抵消后的剩余接收信号功率与自干扰幅度估计误差、相位估计误差之间的关系,进而提出了基于快速搜索思想的射频自适应干扰抵消算法。以最小化剩余接收信号功率为目标,该方法首先选择一个自干扰幅度估计值与相位估计值的区间,使得由此区间确定的剩余接收信号功率只包含极小值,不包含极大值,并将其作为快速搜索的初始搜索区间;每一次迭代搜索时,对该时刻的剩余接收信号功率进行分析和判断,得到缩小一半的新搜索区间。以此类推,搜索区间大小将呈2的指数次幂下降,最终收敛于极小值点。
-
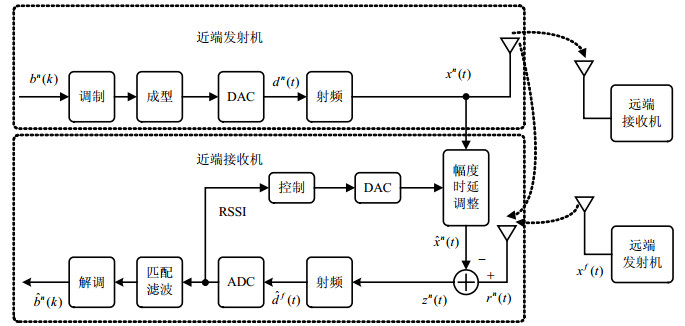
本文采用的全双工系统模型如图 1所示,以近端接收机为例,$ {b^n}(k) $表示近端发送的比特流,近端接收到的信号由两部分组成:来自远端的期望信号$ x_{}^f(t) $及来自近端发射机的大功率自干扰信号$ x_{}^n(t) $,$ z_{}^n(t) $表示干扰抵消后的剩余接收信号。系统包括两个收发信机:近端收发信机与远端收发信机。为了便于分析,本文以近端收发信机为例,分析其中的射频快速自适应干扰抵消算法。

图 1 系统模型
近端发射机对本地发送比特流$ {b^n}(k) $进行二进制相位调制(binary phase shift keying, BPSK)、脉冲成形、数模转换以及射频前端处理后馈入发射天线。近端接收机接收到的射频信号由两部分组成:来自远端的期望信号$ x_{}^f(t) $,以及来自近端发射机的大功率自干扰信号$ x_{}^n(t) $。因此,在近端接收机链路中,首先对射频信号进行射频干扰抵消;干扰抵消结束后,再对远端期望信号进行后续的信号处理。射频自适应干扰抵消的基本思想是:首先利用抵消后的剩余信号功率产生控制信号;自适应调整射频自干扰参考信号的幅度和时延;并将其从接收射频信号中减去。
-
首先考虑近端发射机,定义$ {b^n}(k) \in \left\{ {0, 1} \right\} $为近端待发送比特流,经BPSK调制后,输出序列$ {d^n}(k) \in \{ - 1, 1\} $,再经过脉冲成型和数模转换后,得到基带输出信号:
$$ {d^n}(t) = \sum\limits_{k = - \infty }^{ + \infty } {{d^n}(k)h(t - kT)} $$ (1) 式中,T是符号时间间隔;h(t)是根升余弦成形脉冲0;$ \beta $代表根升余弦滚降因子,$ 0 \le \beta \le 1 $。
$ d_{}^n(t) $经过数模转换器(digital to analog converter, DAC)后转换为模拟信号,并变频到发射频率$ {f_c} $,输出射频信号:
$$ x_{}^n(t) = \sqrt {2{P_n}} d_{}^n(t)\cos (2{\rm{\pi }}{f_c}t + {\phi ^n}) $$ (2) 式中,$ {P_n} $是近端发射信号功率;$ {\phi ^n} $为近端发射载波初始相位。
远端发射信号的信号模型与近端发射信号模型类似,不再赘述。
-
考虑单径自干扰信道场景,接收射频信号可以表示为:
$$ {r^n}(t) = {s^f}(t) + {K_n}x_{}^n(t - \tau _n^n) + n(t) $$ (3) 式中,$ {s^f}(t) $代表接收到的远端期望信号;$ {K_n} $和$ \tau _n^n $分别表示近端发射信号到达近端接收天线时所经历的幅度衰减和传输时延;$ n(t) $代表加性白高斯噪声。近端接收机首先对接收信号进行自干扰的对消,得到剩余接收信号:
$$ z_{}^n(t) = {r^n}(t) - \hat x_{}^n(t) $$ (4) 式中,$ \hat s_{}^n(t) $代表接收自干扰信号的估计:
$$ \hat s_{}^n(t) = {\hat K_n}x_{}^n(t - \hat \tau _n^n) $$ (5) 式中,$ {\hat K_n} $表示幅度衰落$ {K_n} $的估计值;$ \hat \tau _n^n $表示传输时延$ \tau _n^n $的估计值。
近端接收射频单元利用干扰抵消后的剩余接收信号,产生控制信号;并更新$ {\hat K_n} $、$ \hat \tau _n^n $,得到自干扰信号的估计$ \hat s_{}^n(t) $。干扰抵消后的信号经过下变频、模数转换、匹配滤波后,解调得到远端期望信号。
-
针对近端接收机模型中的自干扰抵消,结合式(4)、式(5),可以得到自干扰抵消后剩余信号$ z_{}^n(t) $的功率:
$$ \begin{array}{c} J = {\rm{E}}[z_{}^n{(t)^2}] = \\ {\kern 1pt} {\rm{E}}[{({s^f}(t) + {K_n}{x^n}(t-\tau _n^n)-{{\hat K}_n}{x^n}(t-\hat \tau _n^n) + n(t))^2}] \end{array} $$ (6) 不失一般性,假设接收射频信号中远端期望信号部分$ {s^f}(t) $与近端发射信号$ {x^n}(t) $统计独立,加性白高斯噪声$ n(t) $分别与$ {s^f}(t) $、$ x_{}^n(t) $统计独立,且$ {s^f}(t) $、$ x_{}^n(t) $以及$ n(t) $均是广义平稳随机过程。则式(6) 可以写为:
$$ \begin{array}{c} J = {R_{{s^f}}}(0) + K_n^2{R_{{x^n}}}(0) + {R_n}(0) + \\ \hat K_n^2{R_{{x^n}}}(0) - 2{K_n}{{\hat K}_n}{\rm{E}}[x_{}^n(t-\tau _n^n)x_{}^n(t-\hat \tau _n^n)] \end{array} $$ (7) 式中:
$$ {R_{{x^f}}}(0) = {\rm{E}}[{(s_{}^f(t))^2}] $$ (8) $$ {R_{{x^n}}}(0) = {\rm{E}}[{(x_{}^n(t))^2}] $$ (9) $$ {R_n}(0) = {\rm{E}}[{n^2}(t)] $$ (10) 由于近端发射天线与近端接收天线距离很近,其对应的传输时延$ \hat \tau _n^n $极小。考虑窄带信号的应用场景,则:
$$ h(t - \tau _n^n) \approx h(t) $$ (11) $$ h(t - \hat \tau _n^n) \approx h(t) $$ (12) 结合式(11)、式(12),化简式(7),得到:
$$ \begin{array}{c} J \approx {R_{{s^f}}}(0) + {R_n}(0) + K_n^2{P_n} + \hat K_n^2{P_n} - \\ 2{K_n}{{\hat K}_n}{P_n}\cos [2{\rm{\pi }}{f_c}(\hat \tau _n^n-\tau _n^n)] \end{array} $$ (13) 令$ 2\pi {f_c}\tau _n^n = \phi _0^n $,$ 2\pi {f_c}\hat \tau _n^n = \hat \phi _0^n $,则:
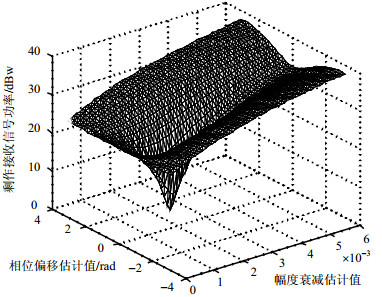
$$ \begin{array}{c} J = {R_{{s^f}}}(0) + {R_n}(0) + K_n^2{P_n} + \hat K_n^2{P_n} - \\ 2{K_n}{{\hat K}_n}{P_n}\cos (\hat \phi _0^n - \phi _0^n) \end{array} $$ (14) 由式(13)、式(14) 可以看出,剩余接收信号功率由$ {\hat K_n} $、$ \hat \tau _n^n $决定,也可等效为由$ {\hat K_n} $、$ \hat \phi _0^n $决定。因此,对干扰信号参数的估计可视为对幅度衰减$ {\hat K_n} $、相位偏移$ \hat \phi _0^n $的估计。根据式(14),在接收期望信号功率为0 dBw,接收噪声功率为0 dBw,接收干扰信号功率为36 dBw,以及相位偏移为0 rad的参数条件下,图 2描绘出了剩余接收信号功率与幅度衰减$ {\hat K_n} $、相位偏移$ \hat \phi _0^n $的关系。

图 2 剩余接收信号功率与幅度衰减、相位偏移的关系
从图 2中可以看出,剩余接收信号功率不是幅度衰减$ {\hat K_n} $、相位偏移$ \hat \phi _0^n $的凸函数,但可观察出其存在极小值,这为全双工射频快速自适应干扰抵消算法提供了条件。
-
根据式(14),可以得到使得剩余接收信号功率最小的二维全局最优点:
$$ \text{arg}\;\mathop {\min }\limits_{{{\hat K}_n}, \hat \phi _0^n} \;J({\hat K_n}, \hat \phi _0^n) = {K_n}, \phi _0^n + 2j{\rm{\pi }} $$ (15) 式中,$ j = 0, \; \pm 1, \; \pm 2, \; \cdots $。该二维全局最优点是射频自干扰抵消算法最终应收敛的点。
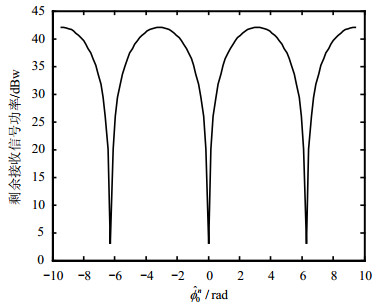
同样根据式(14),任意给定幅度衰减估计值$ {\hat K_n} $时,剩余接收信号功率$ J $是相位偏移估计值$ \hat \phi _0^n $的周期函数,以$ {\hat K_n} = {K_n} $为例,在与图 2相同的参数条件下,图 3给出了$ \hat \phi _0^n $的取值对$ J $的影响。其极小值点位于:
$$ \text{arg}\;\mathop {\min }\limits_{\hat \phi _0^n} \;J(\hat \phi _0^n) = \phi _0^n + 2j{\rm{\pi }} $$ (16) 
图 3 当$ {\hat K_n} = {K_n} $时,剩余接收信号功率与相位偏移的关系
式中,$ j = 0, \; \pm 1, \; \pm 2, \; \cdots $。
从式(16) 可以看出,给定$ {\hat K_n} $时,相位偏移估计值$ \hat \phi _0^n $的极小值点与$ {\hat K_n} $的取值无关。进一步地,与式(15) 给出的二维全局最优值比较,给定$ {\hat K_n} $时,$ \hat \phi _0^n $的极小值点与二维全局最优值点中$ \hat \phi _0^n $的取值一致。
另一方面,任意给定相位偏移估计值$ \hat \phi _0^n $时,剩余接收信号功率$ J $是幅度衰减估计值$ {\hat K_n} $的一元二次函数,其极小值点位于:
$$ \text{arg}\;\mathop {\min }\limits_{{{\hat K}_n}} \;J({\hat K_n}) = {K_n}\cos (\hat \phi _0^n - \phi _0^n) $$ (17) 从式(17) 可以看出,给定$ \hat \phi _0^n $时,幅度衰减估计值$ {\hat K_n} $的极小值点与$ \hat \phi _0^n $的具体取值有关;进一步,与式(15) 给出的二维全局最优值比较,当且仅当$ \hat \phi _0^n = \phi _0^n + 2j\pi $时,$ {\hat K_n} $的极小值点才与二维全局最优值点中$ {\hat K_n} $的取值一致。
根据上述的结论,本文采用分步搜索实现对幅度衰减$ {\hat K_n} $、相位偏移$ \hat \phi _0^n $的自适应估计。首先任意给定一个$ {\hat K_n} > 0 $,自适应迭代估计$ \hat \phi _0^n $;当$ \hat \phi _0^n $控制到一定误差范围内时,自适应迭代估计$ {\hat K_n} $。如图 3所示,在自适应迭代估计$ \hat \phi _0^n $的过程中,由于$ J $既存在极大值,也存在极小值。因此本文首先对相位偏移进行大步长的搜索,以确定一个仅包含一个极小值点,不包含极大值点的取值区间;然后在该区间上对相位偏移进行折半搜索。在自适应迭代估计$ {\hat K_n} $的过程中,由于$ {\hat K_n} $代表传播衰减,不妨假设$ 0 < {\hat K_n} < 1 $,此区间内仅包含一个极小值点且不包含极大值点,因而可直接进行折半搜索。具体搜索步骤为:
1) 相位偏移的固定搜索阶段
① 对$ {\hat K_n} $、$ \hat \phi _0^n $分别赋初始值,实际操作中,$ {\hat K_n} $的初始值可以通过统计小段时间的接收信号功率来参考设置。统计当前$ {\hat K_n} $、$ \hat \phi _0^n $下的剩余信号强度,考虑剩余接收信号是各态遍历的[15],统计方法如下:
$$ J(0) = \frac{1}{{{T_0}}}\int_{{\rm{ }}t}^{{\rm{ }}t + {T_0}} {z_{}^n{{(t)}^2}{\rm{d}}t} $$ (18) 式中,$ {T_0} $为一次剩余接收信号功率的统计时间。
② 以固定步长$ {\mu _\phi } $改变$ \hat \phi _0^n $(固定步长$ {{\mu }_{\phi }}<{\pi }/{2}\; $),统计当前$ {\hat K_n} $、$ \hat \phi _0^n $下的剩余接收信号功率,得到$ J(1) $,如果$ J(1) < J(0) $,表示搜索方向正确,继续在相同方向以$ {\mu _\phi } $为步长改变$ \hat \phi _0^n $;如果$ J(1) \ge J(0) $,表示搜索方向不正确,在其相反方向以$ {\mu _\phi } $为步长改变$ \hat \phi _0^n $。
③ 统计当前$ {\hat K_n} $、$ \hat \phi _0^n $下的剩余接收信号功率,得到$ J(k) $,若$ J(k) < J(k - 1) $,执行步骤④;若$ J(1) \ge J(k - 1) $,执行步骤⑤。
④ 按照上一次迭代中$ \hat \phi _0^n $改变的方向,以$ {\mu _\phi } $为步长继续改变$ \hat \phi _0^n $,执行步骤③。
⑤ 保留$ J(k) $、$ J(k - 1) $、$ J(k - 2) $,以及对应的估计相位$ \hat \phi _0^n(k) $、$ \hat \phi _0^n(k - 1) $、$ \hat \phi _0^n(k - 2) $。
至此,相位偏移的固定搜索阶段结束。由于步长$ {{\mu }_{\phi }}<{\text{ }\!\!\pi\!\!\text{ }}/{2}\; $,则$ \hat \phi _0^n(k - 2) - \hat \phi _0^n(k) < {\rm{\pi }} $,结合图 3可知,此时对于剩余接收信号功率$ J $来说,连续闭区间{$ \hat \phi _0^n(k) $, $ \hat \phi _0^n(k - 2) $}有且仅包含一个极小值点,不包含极大值点。
2) 相位偏移的折半搜索阶段
① 保留$ J(k) $、$ J(k - 2) $中较小的一项作为$ {J_a} $,保留其对应的估计相位$ {\phi _a} $;令$ J(k - 1) $为$ {J_b} $,令$ J(k - 1) $对应的估计相位为$ {\phi _b} $。相位偏移$ \hat \phi _0^n $更新为$ {({{\phi }_{a}}+{{\phi }_{b}})}/{2}\; $。
② 统计当前$ {\hat K_n} $、$ \hat \phi _0^n $下的剩余接收信号功率,得到$ J(k + i) $。保留$ {J_a} $、$ {J_b} $中较小的一项作为新的$ {J_a} $,令其对应的估计相位为$ {\phi _a} $;令$ J(k + i) $为$ {J_b} $,令$ J(k + i) $对应的估计相位为$ {\phi _b} $。则下一次迭代的相位偏移更新$ \hat \phi _0^n $为$ {({{\phi }_{a}}+{{\phi }_{b}})}/{2}\; $。
③ 若$ \bmod (\left| {{\phi _a} - {\phi _b}} \right|, 2{\rm{\pi }}) > {\varepsilon _\phi } $,重复步骤②;反之则代表相位偏移的估计偏差已在可忍受范围内,相位偏移的自适应搜索结束。其中$ {\varepsilon _\phi } $表示相位偏移估计误差的收敛门限。
3) 幅度衰减的折半搜索阶段
当相位偏移自适应搜索结束后,幅度衰减的自适应搜索开始。
① 第1次搜索时,令$ {\hat K_n}(0) = 0 $,统计剩余信号功率$ {J_K}(0) $;
② 第2次搜索时,令$ {\hat K_n}(1) = 1 $,统计剩余信号功率$ {J_K}(1) $;
③ 第3次搜索时,令$ {\hat K_n}(2) = 0.5 $,统计剩余信号功率$ {J_K}(2) $;
④ 保留$ {J_K}(0) $、$ {J_K}(1) $中较小的一项作为$ {J_a} $,令其对应的$ {\hat K_n} $幅度为$ {K_a} $;令$ {J_K}(2) $为$ {J_b} $,令$ {J_K}(2) $对应的$ {\hat K_n} $为$ {K_b} $,则幅度衰减$ {\hat K_n} $更新为$ {({{K}_{a}}+{{K}_{b}})}/{2}\; $;
⑤ 统计当前$ {\hat K_n} $、$ \hat \phi _0^n $下的剩余接收信号功率,得到$ {J_K}(i) $;保留$ {J_a} $、$ {J_b} $中较小的一项作为新的$ {J_a} $,令其对应的$ {\hat K_n} $幅度为$ {K_a} $;令$ {J_K}(i) $为$ {J_b} $,令$ {J_K}(i) $对应的$ {\hat K_n} $为$ {K_b} $。则幅度衰减$ {\hat K_n} $更新为$ {({{K}_{a}}+{{K}_{b}})}/{2}\; $。
⑥ 若$ {K_a} - {K_b} > {\varepsilon _K} $,重复步骤⑤;反之则代表幅度衰减的估计偏差已在可忍受范围内,幅度衰减的自适应搜索结束。其中$ {\varepsilon _K} $表示幅度衰减估计误差的收敛门限。
-
根据式(14) 可知,剩余接收信号功率是相位偏移$ \hat \phi _0^n $的周期函数,其极小值点为$ \hat \phi _0^n = \phi _0^n + 2j{\rm{\pi }} $,$ j = 0, \; \pm 1, \; \pm 2, \; \cdots $。若给定相位偏移初始值$ \hat \phi _0^n(0) $,按照2.2节的自适应搜索算法收敛到的极小值点应为离$ \hat \phi _0^n(0) $最近的极小值点。因此,不妨定义$ \phi _0^n + 2l{\rm{\pi }} $为离相位偏移初始值$ \hat \phi _0^n(0) $最近的极小值点,即$ \phi _0^n + 2l{\rm{\pi }} $$ \in ${$ \hat \phi _0^n(0) - {\rm{\pi }} $, $ \hat \phi _0^n(0) + {\rm{\pi }} $},其中$ l $为使得本式成立的任意整数。
令$ {v_\phi }(k) = \hat \phi _0^n(k) - \phi _0^n - 2l{\rm{\pi }} $代表第k次迭代时相位偏移相对于最优值的偏差。经过第一阶段的固定搜索后,有:
$$ J(k - 1) \le J(k) $$ (19) $$ J(k - 1) < J(k - 2) $$ (20) 因为固定步长$ {{\mu }_{\phi }}<{\text{ }\!\!\pi\!\!\text{ }}/{2}\; $,根据式(14) 有:
$$ \left| {{v_\phi }(k)} \right| \ge \left| {{v_\phi }(k - 1)} \right| $$ (21) $$ \left| {{v_\phi }(k - 2)} \right| > \left| {{v_\phi }(k - 1)} \right| $$ (22) 又因为$ {v_\phi }(k) = {v_\phi }(k - 1) + {\mu _\phi } = {v_\phi }(k - 2) + 2{\mu _\phi } $,所以$ {v_\phi }(k) $与$ {v_\phi }(k - 2) $异号。
在相位偏移折半搜索过程中,令$ {v_a}(i) = {\phi _a}(i) - $ $ \phi _0^n - 2l\pi $、$ {v_b}(i) = {\phi _b}(i) - \phi _0^n - 2l\pi $分别代表第i次迭代中间参数$ {\phi _a}(i) $、$ {\phi _b}(i) $相对于相位偏移最优值的偏差。
相位偏移折半搜索的首次搜索过程中:
$$ {J_a}(0) = \min (J(k), J(k - 2)) $$ (23) 则有$ {v_a}(0) $与$ {v_\phi }(k) $、$ {v_\phi }(k - 2) $中绝对值较小者同号,且:
$$ \left| {{v_a}(0)} \right| = \min (\left| {{v_\phi }(k)} \right|, \left| {{v_\phi }(k - 2)} \right|) $$ (24) 因为:
$$ {v_b}(0) = {v_\phi }(k - 1) = \frac{{{v_\phi }(k) + {v_\phi }(k - 2)}}{2} $$ (25) 所以$ {v_b}(0) $与$ {v_\phi }(k) $、$ {v_\phi }(k - 2) $中绝对值较大的同号。又由于$ {v_\phi }(k) $与$ {v_\phi }(k - 2) $异号,则$ {v_a}(0) $、$ {v_b}(0) $异号。
相位偏移折半搜索的迭代过程中,由于
$$ {J_a}(i) = \min ({J_a}(i - 1), {J_b}(i - 1))\;\begin{array}{*{20}{c}} {}&{} \end{array}i > 1 $$ (26) 则有$ {v_a}(i) $与$ {v_a}(i - 1) $、$ {v_b}(i - 1) $中绝对值较小者同号,且:
$$ \left| {{v_a}(i)} \right| = \min (\left| {{v_a}(i - 1)} \right|, \left| {{v_b}(i - 1)} \right|) $$ (27) 因为:
$$ {v_b}(i) = \frac{{{v_a}(i - 1) + {v_b}(i - 1)}}{2} $$ (28) 所以$ {v_b}(i) $与$ {v_b}(i - 1) $、$ {v_b}(i - 1) $中绝对值较大的同号。又由于$ {v_a}(i - 1) $与$ {v_b}(i - 1) $异号,则$ {v_a}(i) $、$ {v_b}(i) $异号。综上可知:
$$ \phi _0^n + 2l\pi \in (\min ({\phi _a}(i), {\phi _b}(i)), \max ({\phi _a}(i), {\phi _b}(i))) $$ (29) 由于$ {{\phi }_{b}}(i)={\left[{{\phi }_{a}}(i-1)+{{\phi }_{b}}(i-1) \right]}/{2}\; $,且$ {\phi _b}(i) $为$ {\phi _a}(i - 1) $或$ {\phi _b}(i - 1) $,则:
$$ \left| {{\phi _a}(i) - {\phi _b}(i)} \right| = \frac{1}{2}\left| {{\phi _a}(i - 1) - {\phi _b}(i - 1)} \right| $$ (30) 由此类推:
$$ \left| {{\phi _a}(i) - {\phi _b}(i)} \right| = \frac{1}{{{2^i}}}\left| {{\phi _a}(0) - {\phi _b}(0)} \right| $$ (31) 则:
$$ \mathop {\lim }\limits_{i \to \infty } {\phi _a}(i) = \mathop {\lim }\limits_{i \to \infty } {\phi _b}(i) $$ (32) 结合式(29),有:
$$ \mathop {\lim }\limits_{i \to \infty } \hat \phi _0^n(k + i) = \mathop {\lim }\limits_{i \to \infty } {\phi _a}(i) = \mathop {\lim }\limits_{i \to \infty } {\phi _b}(i) = \phi _0^n + 2l\pi $$ (33) 因此,相位偏移$ \hat \phi _0^n(k) $最后会收敛于最优值$ \phi _0^n + 2l\pi $。
-
幅度衰减折半搜索的收敛性分析与相位偏移折半搜索的收敛性分析过程类似,这里不再赘述。
综上所述,以最小化剩余接收信号功率为目标,本文方法首先确定一个幅度衰减、相位偏移的取值区间,使得此区间内的目标函数仅包含一个极小值且不包含极大值,并将其作为折半搜索的初始搜索区间;每一次迭代搜索时,利用剩余接收信号功率关于干扰相位偏移估计误差、干扰幅度衰减估计误差的对称性,对实时的剩余接收信号功率进行统计和分析,得到缩小一半的新搜索区间。以此类推,干扰相位偏移、幅度衰减搜索区间的大小将呈2的指数次幂下降,最终收敛于自干扰信号的相位偏移与幅度衰减真实值。
-
以本文提出的全双工射频快速自干扰抵消算法为基础,利用Matlab仿真软件仿真了其干扰抵消性能,验证了算法的有效性;并且仿真对比了该算法和已有的自适应干扰抵消方法[11-12]的收敛速度性能。仿真参数设置如表 1所示。
表 1 仿真分析的参数设置
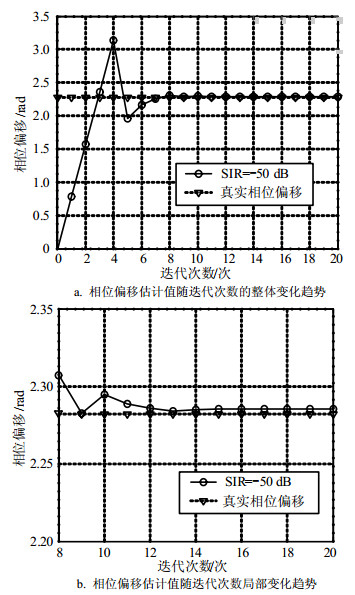
参数名 取值 调制方式 BPSK 成形脉冲 根升余弦 成形脉冲滚降因子$ \beta $ 0.22 信号带宽/MHz 5 载波频率/GHz 2.4 信干比SIR/dB -50 信噪比$ {\frac{{{E}_{b}}}{{{N}_{0}}}}/{\text{dB}}\; $ 0 幅度衰减真实值 0.001 8 相位偏移真实值/rad 2.281 8 相位偏移固定步长$ {\mu _\phi } $ $ {\pi }/{4}\; $ 相位偏移收敛门限$ {\varepsilon _\phi } $/rad 0.01 幅度衰减收敛门限$ {\varepsilon _K} $ 0.001 单次信号功率统计时间/$ {\rm{\mu s}} $ 5 以一次全双工射频快速自适应干扰抵消过程为例,图 4给出了当幅度衰减真实值为0.001 8,相位偏移真实值为2.281 8 rad时,相位偏移估计值随迭代次数的变化趋势,该过程分为两个阶段:第一阶段为固定搜索阶段,容易看出,该阶段经历了5次迭代。第二阶段为折半搜索阶段,进入折半搜索阶段后,相位偏移的搜索区间大小呈2的指数次幂下降。可以看出,相位偏移的估计值将无限逼近于相位偏移的真实值。

图 4 相位偏移估计值随迭代次数的变化趋势
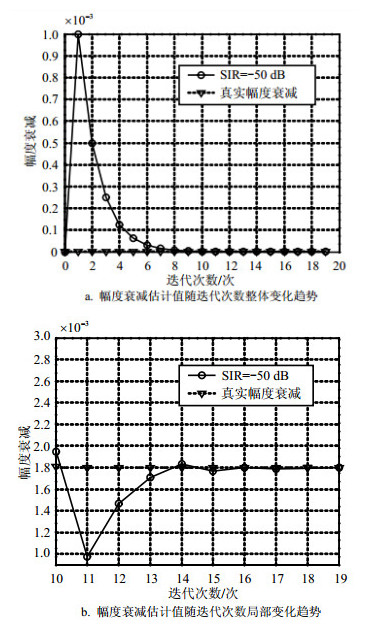
以一次全双工射频快速自适应干扰抵消过程为例,图 5给出了当幅度衰减真实值为0.001 8,相位偏移真实值为2.281 8 rad时,幅度衰减估计值随迭代次数的变化趋势,该过程发生在相位偏移自适应搜索收敛之后。可以看出,幅度衰减的搜索区间大小呈2的指数次幂下降,幅度衰减的估计值将无限逼近于幅度衰减的真实值。

图 5 幅度衰减估计值随迭代次数的变化趋势
根据前面的内容可知,已有的全双工系统中直接耦合射频自干扰抵消技术方法主要分为两类:盲自干扰抵消以及基于信道估计的自干扰抵消。盲自干扰抵消不需要对射频参考信号的幅度、相位进行搜索,但由于没有利用自干扰信道信息,使得自干扰抵消性能不佳。另一方面,基于信道估计的自适应干扰抵消早期通过固定步长搜索实现自干扰信道估计,而目前该类方法中最具代表性是基于最小均方误差准则(least mean square, LMS)的自适应搜索,其收敛速度优于固定步长搜索算法。因此,将本文算法与基于LMS自适应干扰抵消方法[11-12]的收敛速度进行对比,如图 6所示。其中自干扰抑制比代表接收自干扰功率与干扰抑制后的剩余自干扰功率之比。从图中可以看出,本文算法的收敛时间缩短为已有自适应干扰抵消方法收敛时间的40%左右,且收敛后的自干扰抑制比基本保持一致。

图 6 本文算法和已有自适应干扰抵消方法的收敛速度对比
综上所述,考虑单径无线自干扰信道,本文的全双工射频快速自适应干扰抵消算法,能够快速对自干扰信号的幅度衰减、相位偏移估计值进行自适应搜索,有效实现射频自干扰的抵消。从图 6给出的仿真结果中容易看出:在2.4 GHz载频、5 MHz带宽、0 dB信噪比,-50 dB信干比,以及100倍符号周期的统计时间条件下,该射频快速自适应干扰抵消算法可以实现约70 dB的自干扰抵消效果。此外,从图 6中还可以看出,在收敛后干扰抑制性能基本无损失的前提下,本文算法的收敛时间缩短为已有射频自适应干扰抵消方法的40%左右,提高了全双工系统中射频自适应干扰抵消的收敛速度。
-
本文针对同时同频全双工传输场景,考虑单径自干扰传输信道,提出了一种射频域的快速自适应干扰抵消算法。每一次迭代搜索时,利用剩余接收信号功率关于自干扰相位偏移估计误差、幅度衰减估计误差的对称性,对实时的剩余接收信号功率进行统计分析,得到缩小一半的新搜索区间,从而达到快速搜索的目的。与现有的射频自适应干扰抵消方法相比,本文方法在不恶化干扰抑制性能的前提下提高了收敛速度。在全双工系统的现实工程应用中,能够有效地解决射频自适应自干扰抵消收敛速度慢的问题。
Quick Adaptive Self-Interference Cancellation at RF Domain in Full Duplex Systems
-
摘要: 在同时同频全双工收发信机中,考虑单径无线自干扰信道场景,提出了基于快速搜索思想的射频自适应干扰抵消算法。通过分析自干扰幅度估计误差、相位估计误差对射频自干扰抵消后剩余接收信号功率的影响,引出了射频域的快速自适应干扰抵消算法,并讨论了该算法的收敛性。分析与仿真表明,在同时同频全双工系统中,基于快速搜索的射频自适应干扰抵消算法可以有效实现射频域自干扰的抵消;与现有的射频自适应干扰抵消方法相比,其收敛时间减少了约60%。Abstract: In a full-duplex transceiver which transmits and receives at the same frequency simultaneously, a radiofrequency (RF) adaptive self-interference cancellation algorithm based on quick search is proposed to cancel the single path self-interference. By analyzing the impact of the magnitude and phase estimation errors on the residual received signal power after the self-interference cancellation, the RF quick adaptive self-interference cancellation algorithm is derived, and its convergence performance is discussed. By analysis and simulation, the RF adaptive self-interference cancellation algorithm based on quick search can effectively cancel the self-interference at the RF domain, and its convergence time decreases by 60% compared with the existing RF adaptive self-interference canceller.
-
Key words:
- adaptive interference cancellation /
- full duplex /
- quick search /
- RF self-interference
-
表 1 仿真分析的参数设置
参数名 取值 调制方式 BPSK 成形脉冲 根升余弦 成形脉冲滚降因子$ \beta $ 0.22 信号带宽/MHz 5 载波频率/GHz 2.4 信干比SIR/dB -50 信噪比$ {\frac{{{E}_{b}}}{{{N}_{0}}}}/{\text{dB}}\; $ 0 幅度衰减真实值 0.001 8 相位偏移真实值/rad 2.281 8 相位偏移固定步长$ {\mu _\phi } $ $ {\pi }/{4}\; $ 相位偏移收敛门限$ {\varepsilon _\phi } $/rad 0.01 幅度衰减收敛门限$ {\varepsilon _K} $ 0.001 单次信号功率统计时间/$ {\rm{\mu s}} $ 5  下载: 导出CSV
下载: 导出CSV
-
[1] CIRIK A C, RONG Y, HUA Y. Achievable rates of full-duplex MIMO radios in fast fading channels with imperfect channel estimation[J]. IEEE Transactions on Signal Processing, 2014, 62(15):3874-3886. doi: 10.1109/TSP.2014.2330806 [2] ZHENG G. Joint beamforming optimization and power control for full-duplex mimo two-way relay channel[J]. IEEE Transactions on Signal Processing, 2015, 63(3):555-566. doi: 10.1109/TSP.2014.2376885 [3] GUPTA A, JHA R K. A survey of 5G network:Architecture and emerging technologies[J]. IEEE Access, 2015, 3:1206-1232. doi: 10.1109/ACCESS.2015.2461602 [4] SABHARWAL A, SCHNITER P, GUO D, et al. In-band full-duplex wireless:Challenges and opportunities[J]. IEEE Journal on Selected Areas in Communications, 2014, 32(9):1637-1652. doi: 10.1109/JSAC.2014.2330193 [5] DUARTE M, DICK C, SABHARWAL A. Experiment-driven characterization of full-duplex wireless systems[J]. IEEE Transactions on Wireless Communications, 2012, 11(12):4296-4307. doi: 10.1109/TWC.2012.102612.111278 [6] DUARTE M, SABHARWAL A, AGGARWAL V, et al. Design and characterization of a full-duplex multiantenna system for WiFi networks[J]. IEEE Transactions on Vehicular Technology, 2014, 63(3):1160-1177. doi: 10.1109/TVT.2013.2284712 [7] LEE J H. Self-interference cancelation using phase rotation in full-duplex wireless[J]. IEEE Transactions on Vehicular Technology, 2013, 62(9):4421-4429. doi: 10.1109/TVT.2013.2264064 [8] LU H, SHAO S, TANG Y. Self-mixed self-interference analog cancellation in full-duplex communications[C]//2014 IEEE Global Communications Conference (ICC). Austin, TX:IEEE, 2014:3737-3741. [9] MAYANK J, JUNG C, TAE M K, et al. Practical, real-time, full duplex wireless[C]//Mobile Computing and Networking. New York, USA:[s.n.], 2011, 1:301-312. [10] HONG S S, MEHLMAN J, KATTI S. Picasso:Flexible RF and spectrum slicing[J]. ACM SIGCOMM Computer Communication Review, 2012, 42(4):37-48. doi: 10.1145/2377677 [11] 王俊, 赵宏志, 卿朝进, 等.同时同频全双工场景中的射频域自适应干扰抵消[J].电子与信息学报, 2014, 36(6):1435-1440. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201406027.htm WANG Jun, ZHAO Hong-zhi, QIN Chao-jin, et al. Adaptive self-interference cancellation at RF domain in co-frequency co-time full duplex systems[J]. Journal of Electronics & Information Technology, 2014, 36(6):1435-1440. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201406027.htm [12] CHOI Y S, SHIRANI-MEHR H. Simultaneous transmission and reception:Algorithm, design and system level performance[J]. IEEE Transactions on Wireless Communications, 2013, 12(12):5992-6010. doi: 10.1109/TWC.2013.101713.121152 [13] HAYKIN S. Adaptive filter theory[M]. 4th ed. Upper Saddle River:Prentice Hall, 2001:50-74. [14] GORDON L S. Principles of mobile communication[M]. 3rd ed.[S.l.]:Springer, 2011:202-203. [15] ROSS S M. Stochastic processes[M]. New York:Wiley, 1953. -

 点击查看大图
点击查看大图
图(6) / 表(1)
计量
- 文章访问数: 4250
- HTML全文浏览量: 1221
- PDF下载量: 285
- 被引次数: 0
