 ISSN
ISSN 



-
图像分割是把图像中感兴趣的对象半自动或自动地提取出来,为高层次的分析和理解打下基础,如对象模型表示、参数提取、特征提取和识别等[1]。该技术广泛应用于医学诊断[2]、遥感[3]和图像编码[4]等领域。针对具体应用的分割技术已有许多成熟算法,但因其应用不同分割目标各异,到目前为止仍无统一的自动分割平台[5]。
传统分割算法主要依据图像低层特征[6](亮度和颜色)的一致性实现分割。自然图像在获取、存储和传播过程中不可避免地受到噪声攻击,同时其自身含有纹理。噪声和纹理恶化了低层特征的一致性[7],为了抑制噪声,文献[8]将图像分段平滑表示,并结合噪声统计特性提出了基于区域的活动轮廓分割模型(CV model)[9],该模型将对象表示为区域均值。区域均值虽对噪声不敏感,但易受区域纹理影响。为此,文献[10]将图像区域拟合为函数提出了分段平滑(piece-smoothing, PS)的分割模型,区域函数表示在一定程度上抑制了纹理,但计算量较大,难以实际应用。为了简化计算,文献[11]提出了局部二值拟合(local binary fitting, LBF)的分割模型,运用高斯核函数逼近分割曲线邻域像素。文献[12]运用正则化局部二值拟合提出了正则化局部二值拟合的活动轮廓分割模型。上述分割算法定位能力较强,但分割效果依赖于人为的初始曲线、区域统计分布或拟合函数模型。文献[13]运用区域生长确定初始曲线,解决了人为初始曲线的不足。文献[14]结合区域相似性和活动轮廓弥补了区域统计分布和拟合函数模型的不足。
传统基于区域的活动轮廓分割算法要求图像中对象个数已知,对未知对象数目的图像分割缺乏统一目标函数。根据对象轮廓与边缘之间的关系,文献[15]提出了基于边缘的活动轮廓分割算法,该算法对非一致区域(噪声和区域纹理)较敏感。对此,运用高斯平滑对图像进行预处理,但高斯函数的平滑能力取决于其方差,固定方差的高斯核不可能平滑所有图像的区域非一致[7]。为了弥补其不足,将含噪图像分解为噪声和图像分量,对图像分量进行分割[16],该算法抑制了噪声,但对弱边缘对象分割失效。文献[17]结合对象先验形状解决了弱边缘分割。
为了弥补传统活动轮廓分割算法对自然图像的欠分割或过分割,本文将水平集和全变分[18](total variation, TV)有机结合,建立了保边平滑分割模型,运用TV算法提取保边平滑分量,对该分量运用水平集实现图像分割。本文运用聚类算法自适应选取保边平滑的平衡参数,弥补了传统TV算法固定平衡参数的不足;同时设计了分割区域置信度函数,解决了图像过度平滑导致的分割曲线消失问题。该平滑算法继承了全变分的保边性,抑制了非一致区域对分割的影响。实验表明该算法分割测评分数高于传统活动轮廓分割算法。
-
传统活动轮廓分割模型在图像分段平滑[8]表示基础上演化曲线C实现分割,其分割能量函数为:
$$\begin{matrix} E(\mathit{\boldsymbol{u}},C)=\int_{\Omega }{{{(\mathit{\boldsymbol{u}}(x,y)-{{\mathit{\boldsymbol{u}}}_{0}}(x,y))}^{2}}\text{d}x\text{d}y}+ \\ \frac{\beta }{2}\int_{{\Omega }/{C}\;}{{{\left| \nabla \mathit{\boldsymbol{u}}(x,y) \right|}^{2}}\text{d}x\text{d}y}+\gamma \left\| C \right\| \\ \end{matrix}$$ (1) 式中,u0:Ω→[0, 1]表示待分割图像;u表示平滑分量,在该分量中区域内特征一致,区域间存在显著差异;前两项表示对曲线内外区域Ω/C进行各向同性平滑,模糊了边缘。
-
为了保护图像边缘,本文结合TV[18]的保边性,将式(1) 的分段平滑表示为图像整体域平滑,其平滑的能量函数为:
$$\begin{matrix} \varepsilon (\mathit{\boldsymbol{u}})=\int_{\Omega }{{{(\mathit{\boldsymbol{u}}(x,y)-{{\mathit{\boldsymbol{u}}}_{\text{0}}}(x,y))}^{2}}\text{d}x\text{d}y}+ \\ \frac{\beta }{2}\int_{\Omega }{\left| \nabla \mathit{\boldsymbol{u}}(x,y) \right|\text{d}x\text{d}y} \\ \end{matrix}$$ (2) 为了弥补分割曲线的拓扑结构变形,本文将式(1) 的曲线C表示为三维空间的Lipschitz函数φ:Ω→R的水平集(φ=0)[12],曲线内外区域分别表示φ<0和φ>0,本质上运用函数符号表示不同区域。对此引入Heaviside函数H(φ)表示曲线内外区域,曲线C可表示为H(φ)的导数δ(φ)。H(φ)和δ(φ)分别表示如下:
$$H(\phi )=\left\{ \begin{matrix} 1 & \phi \ge 0 \\ 0 & \phi <0 \\ \end{matrix} \right.,\delta (\phi )=\frac{\text{d}H(\phi )}{\text{d}\phi }$$ (3) 曲线的函数水平集表示将分割曲线演化转化为函数演化。在函数演化过程中,函数φ不能时时满足正则条件 $\left| \nabla \phi \right|=1$ ,为此引入了惩罚项[15];水平集曲线长度和区域面积减小。基于水平集演化的图像分割能量函数为:
$$\begin{matrix} \varepsilon (\phi )=\lambda \int_{\Omega }{g\delta (\phi )\left| \nabla \phi \right|}\text{d}x\text{d}y+ \\ \nu \int_{\Omega }{gH(-\phi )\text{d}x\text{d}y+\frac{\mu }{2}}{{\int_{\Omega }{\left| \nabla \phi -1 \right|}}^{2}}\text{d}x\text{d}y \\ \end{matrix}$$ (4) 式中,g表示图像边缘指示函数。
基于水平集的图像分割解决了拓扑结构变形,TV图像平滑保护了边缘信息,本文结合水平集和全变分的优点,建立了基于水平集的保边平滑分割模型,其分割目标函数为:
$$\begin{matrix} E(\mathit{\boldsymbol{u}},\phi )=\underset{\mathit{\boldsymbol{u}},\phi }{\mathop{\arg \min }}\,\left\{ \int_{\Omega }{{{(\mathit{\boldsymbol{u}}(x,y)-{{\mathit{\boldsymbol{u}}}^{0}}(x,y))}^{2}}\text{d}x\text{d}y}+ \right. \\ \frac{\beta }{2}\int_{\Omega }{\left| \nabla \mathit{\boldsymbol{u}}(x,y) \right|\text{d}x\text{d}y+}\lambda \int_{\Omega }{f\delta (\phi )\left| \nabla \phi \right|}\text{d}x\text{d}y+ \\ \left. \nu \int_{\Omega }{fH(-\phi )\text{d}x\text{d}y+\frac{\mu }{2}}{{\int_{\Omega }{\left| \nabla \phi -1 \right|}}^{2}}\text{d}x\text{d}y \right\} \\ \end{matrix}$$ (5) 式中,f表示平滑分量的边缘指示函数:
$$f={{(1+\left| \nabla \mathit{\boldsymbol{u}} \right|)}^{-1}}$$ (6) 为了分析函数φ,采用梯度下降算法,其负梯度为:
$$\begin{matrix} \frac{\partial \phi }{\partial t}=-\frac{\partial E(\mathit{\boldsymbol{u}},\phi )}{\partial \phi }=\mu \left[ \text{div}\left( \frac{\nabla \phi }{\left| \nabla \phi \right|} \right)-\Delta \phi \right]- \\ \lambda \delta (\phi )\text{div}\left( g\frac{\nabla \phi }{\left| \nabla \phi \right|} \right)-\nu g\delta (\phi ) \\ \end{matrix}$$ (7) 为了计算平滑分量,对E(u, φ)求u的偏导数:
$$\frac{\partial E(\mathit{\boldsymbol{u}},\phi )}{\partial u}=\beta (\mathit{\boldsymbol{u}}-{{\mathit{\boldsymbol{u}}}_{0}})-\text{div}({\nabla \mathit{\boldsymbol{u}}}/{\left| \nabla \mathit{\boldsymbol{u}} \right|}\;)$$ (8) 利用像素(i, j)及其4邻域p ∈ Λ0,运用固定点迭代算法计算平滑分量u(i, j):
$$\mathit{\boldsymbol{u}}(i,j)=\frac{1}{\beta +\sum\limits_{p\in {{\mathit{\Lambda }}_{0}}}{\omega (p)}}[\beta {{\mathit{\boldsymbol{u}}}_{0}}(i,j)+\sum\limits_{p\in {{\mathit{\Lambda }}_{0}}}{\omega (p)}\mathit{\boldsymbol{u}}(p)]$$ (9) 式中,β, ω(p)分别表示中心像素(i, j)平衡参数和邻域像素p的权重。利用差分计算 $\text{div}({\nabla \mathit{\boldsymbol{u}}}/{\left| \nabla \mathit{\boldsymbol{u}} \right|}\;)$ ,可得到权重 $\omega (p)\text{=}{{\left| \nabla \mathit{\boldsymbol{u}}(p) \right|}^{-1}}$ 。
-
在传统TV算法中,平衡参数常常依赖于人为设定。如果 $\beta \gg \omega (p)$ ,则 $\mathit{\boldsymbol{u}}(i,j)\approx {{\mathit{\boldsymbol{u}}}_{0}}(i,j)$ ,平滑分量残余的非一致较多,分割曲线易陷入局部最优;如果 $\beta \ll \omega (p)$ ,则平滑分量近似为邻域均值,边缘模糊导致曲线过度收敛。
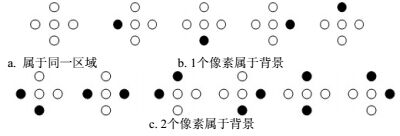
为了弥补人为平衡参数对分割的影响,本文分析了中心像素和4邻域的两类聚类:若邻域像素位于同一区域,根据区域的连通性,则中心像素位于该区域,如图 1a所示。若中心像素位于目标轮廓处,4邻域像素所属区域有两种情况:1) 仅1个像素属于背景区域有4种,如图 1b所示。2) 2个像素属于背景有6种,如图 1c所示。

图 1 中心和邻域像素的聚类
从图 1可见,中心像素属于像素数目较多的区域。为了保护边缘,相同区域内像素平滑权重应近似相等,不同区域差异较大。根据中心像素的类别属性平衡参数应取为:
$$\beta =k\times \text{medium}\{{{\left| \nabla {{\mathit{\boldsymbol{u}}}_{0}}(i,j) \right|}^{-1}},{{\left| \nabla \mathit{\boldsymbol{u}}(p) \right|}^{-1}}p\in {{\mathit{\Lambda }}_{0}}\}$$ (10) -
式(7) 中 $\delta (\phi )$ 的非连续性,其数值计算时,运用连续 ${{\delta }_{a}}(\phi )$ (a = 1.5) 代替 $\delta (\phi )$ :
$${{\delta }_{a}}(\phi )=\left\{ \begin{matrix} 0 & \left| \phi \right|>a \\ \frac{1}{2a}\left[ 1+\cos \left( \frac{\pi \phi }{a} \right) \right] & \left| \phi \right|\le a \\ \end{matrix} \right.$$ (11) 运用前向差分计算 ${\partial \phi }/{\partial t}\;$ ,中心差分计算散度。式(7) 可以离散化为:
$$\begin{align} & \phi _{i,j}^{k+1}-\phi _{i,j}^{k}=\mu t[\Delta \phi _{i,j}^{k}-\text{div}({\nabla \phi _{i,j}^{k}}/{\left| \nabla \phi _{i,j}^{k} \right|}\;)]+ \\ & \lambda {{\delta }_{a}}(\phi _{i,j}^{k})\text{div}(f_{i,j}^{m}{\nabla \phi _{i,j}^{k}}/{\left| \nabla \phi _{i,j}^{k} \right|}\;)+\nu f_{i,j}^{m}{{\delta }_{a}}(\phi _{i,j}^{k}) \\ \end{align}$$ (12) 式中,Δ表示Laplacian算子;t为时间间隔; $f_{i,j}^{m}$ 表示第m次迭代平滑分量um边缘指示函数。
图像及其平滑分量存在恒值区域,计算梯度时引入任意小的正数b (b=0.01):
$${{\left| \nabla {{\mathit{\boldsymbol{u}}}_{i,j}} \right|}_{b}}=\sqrt{{{b}^{2}}+{{\left| \nabla {{\mathit{\boldsymbol{u}}}_{i,j}} \right|}^{2}}}$$ (13) 离散计算平滑分量um:
$$\mathit{\boldsymbol{u}}_{i,j}^{m}=\frac{\sum\limits_{p\in {{\mathit{\Lambda }}_{0}}}{\omega _{b}^{m-1}}{{\mathit{\boldsymbol{u}}}^{m-1}}(p)+{{\beta }^{m-1}}{{\mathit{\boldsymbol{u}}}_{0}}(i,j)}{{{\beta }^{m-1}}+\sum\limits_{p\in {{\mathit{\Lambda }}_{0}}}{\omega _{b}^{m-1}(p)}}$$ (14) 随着m的增加,平滑分量收敛于图像均值,导致分割曲线消失。为了避免这一现象,根据不同平滑分量分割区域不同,本文设计了相邻两次迭代平滑分量的分割区域置信度Pr:
$$\Pr =\frac{\text{card}({{A}^{m}}\bigcap {{A}^{m-1}})}{\max \{\text{card}({{A}^{m}}),\text{card}({{A}^{m-1}})\}}$$ (15) 式中,A表示分割区域 $\left\{ (x,y)\left| \phi (x,y)\le 0 \right. \right\}$ ;card(·)表示集合·的基数。当分割区域置信度满足Pr≥0.99时,则停止平滑迭代。
-
基于水平集的自适应保边平滑分割将图像保边平滑和水平集的图像分割相结合,同时依据分割区域的置信度终止平滑迭代,避免过度平滑导致分割曲线消失。分割算法流程如图 2所示。

图 2 分割流程
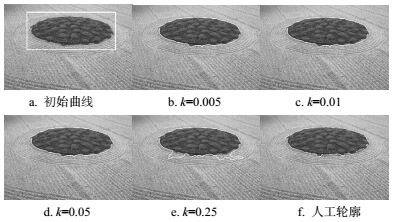
式(12) 中水平集函数演化参数分别为μ=0.04,λ=5.0,v=3.0,t=5.0 [15]。为了分析式(10) 中系数k与分割测评分数(准确率、召回率和F测度)之间的关系,对来自Berkeley数据集的480×320图像运用不同k平滑后的部分分割结果如图 3所示。当k=0.005时,平滑能力较强但保边性差,分割结果如图 3b所示。当k=0.25时,对弱边缘保护较好,分割曲线局部收敛于弱边缘,分割结果如图 3e所示。与人工绘制的轮廓曲线(如图 3f)相比,本文平滑算法平滑了角点,导致角点处定位不准确。不同系数k平滑的分割测评分数如表 1所示。从表 1可见,当k较小时,召回率较小;随着k增大,准确率降低,F测度减小。该文系数k取为0.05。

图 3 不同系数k的分割结果
表 1 不同参数k的分割测评分数
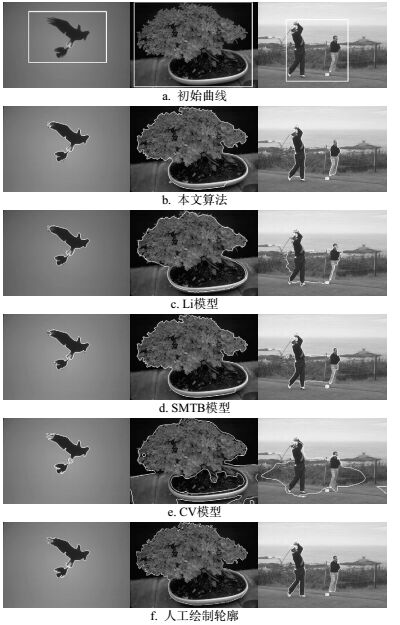
参数k 准确率 召回率 F测度 0.005 0.982 0.970 0.975 0.01 0.981 0.974 0.978 0.05 0.981 0.975 0.978 0.1 0.980 0.975 0.977 0.2 0.963 0.976 0.969 0.25 0.905 0.977 0.940 0.3 0.860 0.979 0.915 为了测试本文算法对自然图像分割的有效性,在处理器为Intel-Core i5CPU @3.40GHz,RAM为4 GB,VC6.0的环境下,对来自Berkeley数据集的320×240图像进行分割,并与Li模型[15]、纹理模糊分割模型[19](segmentation model on texture blurring, SMTB)和CV模型[9]进行比较。部分结果如图 4所示,其中,鹰图像背景和对象区域较平滑,且两者分界线明确,4种算法分割效果相当;盆栽顶部是由树叶构成且背景区域平滑,本文算法、Li模型和SMTB分割效果相当,相对于人工轮廓本文算法在树冠部分比Li模型和SMTB定位准确。由于盆栽内部区域存在显著的灰度差异,CV模型分割效果较差。人物图像存在多个对象同时区域非一致程度较大,本文算法将两个对象分割出来,但多分割出2个较小区域,Li模型和SMTB将两个对象作为1个对象。CV模型分割效果不理想。不同分割算法的准确率、召回率、F测度和CPU运行时间如表 2所示,从表 2可见,本文算法F测度比其他算法高,较好抑制非一致区域对分割的影响,但CPU时间较长。

图 4 不同算法分割结果之比较
表 2 不同算法对图 4的分割测评及CPU时间
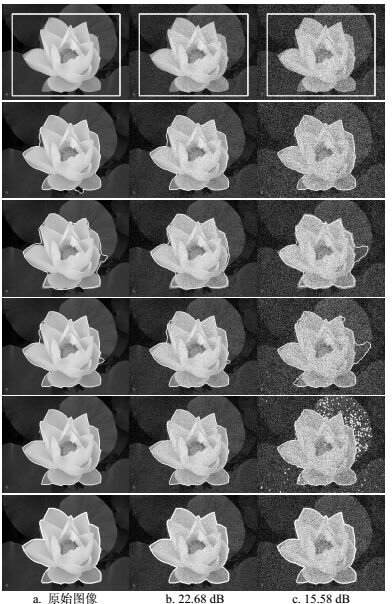
S 分割算法 分割测度 图 4a 图 4b 图 4c 本文算法 准确率 0.986 0.997 0.928 召回率 0.880 0.961 0.856 F测度 0.931 0.978 0.891 CPU时间 10.67 22.54 38.35 Li模型 准确率 0.993 0.993 0.413 召回率 0.873 0.928 0.768 F测度 0.929 0.959 0.537 CPU时间 8.58 17.34 32.79 SMTB模型 准确率 0.993 0.994 0.503 召回率 0.875 0.947 0.832 F测度 0.931 0.969 0.627 CPU时间 9.47 18.17 37.25 CV模型 准确率 0.891 0.724 0.274 召回率 0.932 0.802 0.893 F测度 0.911 0.761 0.419 CPU时间 6.36 8.96 14.25 为了验证本文算法对噪声的鲁棒性,对来自Internet的一幅320×240及其加性高斯噪声的图像进行分割,部分结果如图 5所示。第1行到第6行分别为初始曲线、本文算法、Li、SMTB、CV模型和人工绘制轮廓。随着图像质量下降(如图 5a~5c),本文算法分割曲线定位准确;Li算法的各向同性扩散模糊了对象轮廓,同时高斯平滑不可能对抑制所有噪声,分割曲线存在局部过收敛和早熟现象,导致分割曲线定位不准确;SMTB和CV模型对PSNR较高的图像分割曲线定位较准确,对PSNR较低的图像分割效果较差,相对于人工绘制曲线,本文算法对原始图像存在局部早熟现象,这由于图像在初始曲线内部存在局部强边缘。

图 5 不同算法对含噪图像的分割结果
不同算法对含噪图像分割的准确率、召回率和F测度如表 3所示。从表 3可见,4种分割算法对原始图像分割的准确率、召回率和F测度差异不大。随着图像质量下降,4种分割算法准确率和F测度减少,图像自适应保边平滑对PSNR大于等于12.63 dB图像,分割的F测度大于0.950,而Li模型和SMTB为PSNR大于等于18.86 dB,CV模型为17.1 dB。为了评价分割算法对噪声的鲁棒性,以原始图像分割的F测度作为基础,自适应保边平滑分割、Li模型、SMTB和CV模型的F测度最大偏差分别为0.038,0.208,0.152和0.233,F测度标准方差分别为0.013,0.069,0.052和0.086。自适应保边平滑分割的F测度最大偏差和方差均比其他3种算法小,F测度平均值为0.964,比Li模型、SMTB和CV模型分别高于0.054,0.035和0.052,这表明该分割算法对噪声不敏感。
表 3 不同分割算法对含噪图像的分割测评比较
PSNR/dB 自适应保边平滑分割 Li模型 SMTB模型 CV模型 准确率 召回率 F测度 准确率 召回率 F测度 准确率 召回率 F测度 准确率 召回率 F测度 22.68 0.994 0.946 0.969 0.996 0.915 0.954 0.983 0.947 0.965 0.997 0.952 0.974 21.22 0.992 0.945 0.968 0.993 0.925 0.958 0.983 0.945 0.964 0.992 0.960 0.975 20.24 0.995 0.945 0.969 0.991 0.918 0.953 0.981 0.945 0.962 0.992 0.938 0.964 18.86 0.992 0.946 0.968 0.990 0.915 0.951 0.978 0.943 0.960 0.973 0.936 0.954 17.10 0.992 0.949 0.968 0.953 0.921 0.936 0.953 0.940 0.946 0.967 0.934 0.950 15.58 0.999 0.940 0.969 0.903 0.922 0.912 0.951 0.940 0.945 0.965 0.931 0.948 14.75 0.998 0.948 0.968 0.860 0.920 0.890 0.921 0.911 0.916 0.831 0.891 0.859 12.63 0.993 0.943 0.967 0.727 0.948 0.823 0.827 0.894 0.859 0.758 0.818 0.786 12.11 0.985 0.879 0.929 0.630 0.950 0.757 0.781 0.850 0.814 0.718 0.769 0.742 原图像 0.989 0.947 0.967 0.980 0.952 0.965 0.984 0.948 0.966 1.0 0.946 0.972 最大偏差 0.01 0.068 0.038 0.350 0.037 0.208 0.203 0.098 0.152 0.282 0.191 0.233 均值 0.993 0.939 0.964 0.902 0.929 0.910 0.934 0.926 0.929 0.919 0.907 0.912 标准方差 0.014 0.021 0.013 0.128 0.015 0.069 0.072 0.032 0.052 0.108 0.064 0.086 -
自适应保边平滑分割算法在图像分段平滑基础上,结合TV算法,对图像进行保边平滑,运用水平集对平滑分量进行分割。该分割算法依图像局部信息选取平衡参数,自适应调节保边和平滑性能,避免了水平集曲线收敛于局部最优,为了克服平滑分量趋近于图像均值而导致分割曲线消失,根据分割区域的置信度设计了平滑收敛条件。该分割算法继承了TV算法的保边性,抑制了区域非一致对图像分割的影响。实验结果表明,自适应保边平滑分割对噪声不敏感,其分割测度优于Li、SMTB和CV模型,在一定程度上提高了自然景物图像的分割效果。但是该算法仅仅保护而不能增强边缘,对弱边缘形成的轮廓定位不准。
Adaptive Edge-Preserved Smoothing Segmentation on Level Set
-
摘要: 为了提高活动轮廓模型对自然图像的分割效果,提出了一种新的分割算法。首先将水平集和全变分有机结合,建立了保边平滑分割模型;其次运用聚类算法自适应选取平衡参数,避免了水平集曲线收敛于局部最优;最后根据水平集对不同平滑分量分割区域不同,设计了基于区域置信度的分割平滑收敛函数,解决了分割曲线消失问题。实验表明,该算法对自然图像分割测评分数高于传统活动轮廓分割算法,对图像纹理和噪声不敏感。Abstract: To improve the performance of the active contour segmentation algorithm on natural images, a novel segmentation algorithm is proposed. First, combining the level set with the total variation, an edge-preserving smoothing segmentation model is constructed. Then a kind of clustering algorithm is employed to learn the balance parameter adaptively to avoid the level set curve converges at the local optimal point. At last, according to the different smoothing components with different segmentation regions, the segmentation smoothing convergence function based on regional confidence is designed to solve segmentation curve vanishes. Experimental results show that the score of this algorithm is higher than that of the traditional active-contour-based segmentation algorithmsfor the real images, and the algorithm is insensitive to texture and noise.
-
Key words:
- edge-preserved smoothing /
- image segmentation /
- level set /
- regional confidence
-
表 1 不同参数k的分割测评分数
参数k 准确率 召回率 F测度 0.005 0.982 0.970 0.975 0.01 0.981 0.974 0.978 0.05 0.981 0.975 0.978 0.1 0.980 0.975 0.977 0.2 0.963 0.976 0.969 0.25 0.905 0.977 0.940 0.3 0.860 0.979 0.915  下载: 导出CSV
下载: 导出CSV
表 2 不同算法对图 4的分割测评及CPU时间
S 分割算法 分割测度 图 4a 图 4b 图 4c 本文算法 准确率 0.986 0.997 0.928 召回率 0.880 0.961 0.856 F测度 0.931 0.978 0.891 CPU时间 10.67 22.54 38.35 Li模型 准确率 0.993 0.993 0.413 召回率 0.873 0.928 0.768 F测度 0.929 0.959 0.537 CPU时间 8.58 17.34 32.79 SMTB模型 准确率 0.993 0.994 0.503 召回率 0.875 0.947 0.832 F测度 0.931 0.969 0.627 CPU时间 9.47 18.17 37.25 CV模型 准确率 0.891 0.724 0.274 召回率 0.932 0.802 0.893 F测度 0.911 0.761 0.419 CPU时间 6.36 8.96 14.25
下载: 导出CSV
表 3 不同分割算法对含噪图像的分割测评比较
PSNR/dB 自适应保边平滑分割 Li模型 SMTB模型 CV模型 准确率 召回率 F测度 准确率 召回率 F测度 准确率 召回率 F测度 准确率 召回率 F测度 22.68 0.994 0.946 0.969 0.996 0.915 0.954 0.983 0.947 0.965 0.997 0.952 0.974 21.22 0.992 0.945 0.968 0.993 0.925 0.958 0.983 0.945 0.964 0.992 0.960 0.975 20.24 0.995 0.945 0.969 0.991 0.918 0.953 0.981 0.945 0.962 0.992 0.938 0.964 18.86 0.992 0.946 0.968 0.990 0.915 0.951 0.978 0.943 0.960 0.973 0.936 0.954 17.10 0.992 0.949 0.968 0.953 0.921 0.936 0.953 0.940 0.946 0.967 0.934 0.950 15.58 0.999 0.940 0.969 0.903 0.922 0.912 0.951 0.940 0.945 0.965 0.931 0.948 14.75 0.998 0.948 0.968 0.860 0.920 0.890 0.921 0.911 0.916 0.831 0.891 0.859 12.63 0.993 0.943 0.967 0.727 0.948 0.823 0.827 0.894 0.859 0.758 0.818 0.786 12.11 0.985 0.879 0.929 0.630 0.950 0.757 0.781 0.850 0.814 0.718 0.769 0.742 原图像 0.989 0.947 0.967 0.980 0.952 0.965 0.984 0.948 0.966 1.0 0.946 0.972 最大偏差 0.01 0.068 0.038 0.350 0.037 0.208 0.203 0.098 0.152 0.282 0.191 0.233 均值 0.993 0.939 0.964 0.902 0.929 0.910 0.934 0.926 0.929 0.919 0.907 0.912 标准方差 0.014 0.021 0.013 0.128 0.015 0.069 0.072 0.032 0.052 0.108 0.064 0.086
下载: 导出CSV
-
[1] SEN Y K, YI Q, ALBERTO A, et al. Image segmentation methods for intracranial aneurysm haemodynamic research[J]. Journal of Biomechanics, 2014, 47(5):1014-1019. doi: 10.1016/j.jbiomech.2013.12.035 [2] CAON M, SEDLÁŘ J, BAJGER M, et al. Computerassisted segmentation of CT images by statistical region merging for the production of voxel models of anatomy for CT dosimetry[J]. Australasian Physical & Engineering Sciences in Medicine, 2014, 37(2):393-403. https://www.researchgate.net/publication/261922330_Computer-assisted_segmentation_of_CT_images_by_statistical_region_merging_for_the_production_of_voxel_models_of_anatomy_for_CT_dosimetry [3] YANG X, GAO X B, TAO D C, et al. Improving level set method for fast auroral oval segmentation[J]. IEEE Transactions on Image Processing, 2014, 23(7):2854-2865. doi: 10.1109/TIP.2014.2321506 [4] 赵荣昌, 马义德.一种用于图像编码的区域分割新方法[J].电子学报, 2014, 42(7):1277-1283. http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201407006.htm ZHAO Rong-chang, MA Yi-de. A novel region segmentation algorithm with neural network for segmented image coding[J]. Acta Electronica Sinica, 2104, 42(7):1277-1283. http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201407006.htm [5] SHEN J B, DU Y F, LI X L. Interactive segmentation using constrained laplacian optimization[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2014, 24(7):1086-1099. https://www.researchgate.net/publication/263510247_Interactive_Segmentation_Using_Constrained_Laplacian_Optimization [6] KHAN M W. A survey:Image segmentation techniques[J]. International Journal of Future Computer and Communication, 2014, 3(2):89-93. http://ijfcc.org/papers/274-B317.pdf [7] WANG L, HUA G, XUE J R, et al. Joint segmentation and recognition of categorized objects from noisy web image collection[J]. IEEE Transactions on Image Processing, 2014, 23(9):4070-4086. doi: 10.1109/TIP.2014.2339196 [8] MUMFORD D, SHAH J. Optimal approximations of piecewise smooth functions and associated variational problems[J]. Communications on Pure and Applied Mathematics, 1989, 42(5):577-685. doi: 10.1002/(ISSN)1097-0312 [9] CHAN T F, VESE L. Active contours without edges[J]. IEEE Transactions on Image Processing, 2001, 2(10):266-277. http://www.docin.com/p-89664384.html [10] TSAI A, YEZZI A. Curve evolution implementation of the mumford-shah functional for image segmentation, denoising, interpolation, and magnification[J]. IEEE Transaction on Image Processing, 2001, 10(8):1169-1186. doi: 10.1109/83.935033 [11] LI C, KAO C. Implicit active contours driven by local binary fitting energy[C]//Proceedings of IEEE Conference on Computer Vision and Pattern Recognition. Minneapolis, Minnesota, US:IEEE, 2007:1-7. [12] PENG Y, LIU F. Active contours driven by normalized local image fitting energy[J]. Journal of Systems Engineering and Electronics, 2014, 25(2):307-313. doi: 10.1109/JSEE.2014.00035 [13] 姜慧研, 冯锐杰.基于改进的变分水平集和区域生长的图像分割方法的研究[J].电子学报, 2012, 40(8):1659-1664. http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201208027.htm JIANG Hui-yan, FENG Rui-jie. Image segmentation method research based on improved variational level set and region growth[J]. Acta Electronica Sinica, 2012, 40(8):1659-1664. http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201208027.htm [14] 孔科, 汪国昭.基于区域相似性的活动轮廓SAR图像分割[J].计算机辅助设计与图形学学报, 2010, 22(9):1554-1560. http://www.cnki.com.cn/Article/CJFDTOTAL-JSJF201009020.htm KONG Ke, WANG Guo-zhao. Region-similarity based active contour model for sar image segmentation[J]. Journal of Computer-Aided Design & Computer Graphics, 2010, 22(9):1554-1560 http://www.cnki.com.cn/Article/CJFDTOTAL-JSJF201009020.htm [15] LI C, XU C, GUI C, et al. Level set evolution without re-initialization:a new variational formulation[C]//Proceeding of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. Washington DC, USA:IEEE Computer Society, 2005:430-436. [16] 文乔农, 徐双, 万遂人.医学噪声图像分割的分解与活动轮廓方法[J].计算机辅助设计与图形学学报, 2011, 23(11):1882-1889. http://www.cnki.com.cn/Article/CJFDTOTAL-JSJF201111013.htm WEN Qiao-nong, XU Shuang, WAN Sui-ren. Decomposition and active contour method for medical noise image segmentation[J]. Journal of Computer-Aided Design & Computer Graphics, 2011, 23(11):1882-1889. http://www.cnki.com.cn/Article/CJFDTOTAL-JSJF201111013.htm [17] YEO SI Y, XIE X H, SAZONOV I, et al. Segmentation of biomedical images using active contour model with robust image feature and shape prior[J]. International Journal for Numerical Methods in Biomedical Engineering, 2014, 30(2):232-248. doi: 10.1002/cnm.2600 [18] CHAN T F, OSHER S, SHEN J H. The digital TV filter and nonlinear denoising[J]. IEEE Transactions on Image Processing, 2001, 10(2):231-241. doi: 10.1109/83.902288 [19] 何坤, 郑秀清, 张永来.纹理模糊的图像分割[J].四川大学学报(工程科学版), 2015, 47(4):111-117. http://www.cnki.com.cn/Article/CJFDTOTAL-SCLH201504016.htm HE Kun, ZHENG Xiu-qing, ZHANG Yong-lai. Image segmentation on texture blurring[J]. Journal of Sichuan University(Engineering Science Edition), 2015, 47(4):111-117. http://www.cnki.com.cn/Article/CJFDTOTAL-SCLH201504016.htm -

 点击查看大图
点击查看大图
图(5) / 表(3)
计量
- 文章访问数: 3974
- HTML全文浏览量: 1175
- PDF下载量: 145
- 被引次数: 0
