 ISSN
ISSN 


 下载:
下载:

-
室内定位由于在各种军事及民用应用领域存在大量的应用需求,近年来得到了飞速猛进的发展。和基于GPS、蜂窝网移动定位等室外定位环境相比,室内环境具有定位区域复杂、面积相对较小、非直达波传播严重、精度要求相对较高等特点。这些特点使得传统基于信号到达强度(RSS)[1]、信号到达时间(TOA)[2]、信号到达时间差(TDOA)[3]及信号到达角度(AOA)[4]等方法的定位性能在室内环境中都有不同程度的下降。
现有的室内定位技术可分为基于距离的定位技术和基于指纹库的定位技术。基于距离的定位方法主要思想是通过某种测量先估计目标和参考节点之间的距离,通过多个距离测量由圆交叉、双曲线交叉、角度交叉等估计目标位置的最小二乘解。这种技术包括RSS、TOA、TDOA、AOA等。由于室内复杂环境中严重多径及非直达波传播的影响,再加上室内传播信道的路径损耗因子很难估计,使得这种基于距离的室内定位算法精度较差[5]。比较而言,基于指纹的定位算法无须通过测量估算目标和参考节点之间的距离,而是直接通过指纹匹配获取目标的位置估计。这类方法的定位精度较基于距离的方法有了较大程度的提高,因而近年来受到了室内定位领域研究者的广泛关注。
但现有的指纹类定位方法也存在以下问题:1) 指纹类型大都较为单一。大部分指纹类定位算法都采用接收信号强度(RSS)作为指纹,这是由于该指纹的获取较为简单,一些常见的移动设备大都具有信号强度指示的功能。但单一的信号强度指纹受室内环境变化的影响较大,因此其定位精度较差[6];2) 指纹的环境适应能力差。现有的指纹大部分只能针对某种环境噪声设计,无法适应室内的非平稳环境。使得现有指纹类定位算法的稳健性较差[7];3) 现有指纹定位方法在信息融合方面存在不足,无法发挥指纹的集群优势,使得这些算法的定位性能不高。
神经网络具有并行计算能力强、计算速度快、处理效率高及自学能力强等特点,近年来在室内定位领域也受到了较多的关注。文献[8]针对无线传感网(WSN)环境提出了一种基于神经网络的室内定位方法;文献[9]利用深度神经网络提出了一种可针对室内外的定位算法;文献[10]提出了可以应用于室内定位环境下的多层神经网络。上述算法都针对的是RSS指纹,指纹较为单一,无法发挥群指纹的集群优势。
D-S(Dampster-Shafer)证据理论是一种根据证据进行推理的理论框架,经典概率论只是D-S证据理论的特殊情况,该理论在不确定性推理方面具有经典概率论不可比拟的优势[11]。文献[12]提出了基于D-S证据理论的多信息融合方法,文献[13]对D-S在数据融合中的应用进行了较为系统的阐述。总之,D-S证据理论在室内单指纹定位中已经被证明是可行的解决方案[14]。
针对上述问题,本文提出了一种基于D-S证据理论群指纹融合高精度室内定位方法。其思路为:在离线建库阶段,利用室内阵列信号接收模型,首先通过计算阵列接收信号的不同统计特性构建包括信号强度、协方差矩阵、信号子空间及四阶累积量组成的群指纹库,再对群指纹进行神经网络训练获取每种指纹的分类器。其中,信号强度(平均功率)反映了信道传播的路径损耗,协方差矩阵包含了除平均功率外(对角线元素r(0))的其他的信道相关信息;信号子空间对多径、非直达波传播等环境变化具有稳健性;而四阶累积量则对色噪声具有很好的稳健性。在实测阶段,把实测数据的上述4种变换输入到训练好的神经网络分类器中,最后利用D-S证据理论对神经网络分类器的分类结果进行融合,给出最终的定位结果。该算法可充分发挥指纹信息的集群优势,对噪声、多径传播等具有较好的稳健性,是一种高精度的室内定位新方法。仿真结果证明了算法的有效性及可行性。
-
考虑一个M个接收阵元的均匀线阵,阵元间距为d,如图 1所示。ym(t)代表第m个阵元接收到信号s(t)在位置(x, y)发射的幅度为ai、到达角度为φi、延迟为τi的多径来波(i为多径的序号),则M个阵元在t时刻的接收信号矢量为[15]:
$$ \mathit{\boldsymbol{y}}(t) = \sum\limits_{i = 0}^{I - 1} {{\alpha _i}} \mathit{\boldsymbol{c}}\left( {{\phi _i}} \right)s\left( {t - {\tau _i}} \right) + \mathit{\boldsymbol{n}}\left( t \right) $$ (1) 
图 1 阵列接收示意图
式中,I为每个阵元的多径条数;n(t)为阵元噪声矢量;$ \mathit{\boldsymbol{c}}\left( {{\phi _i}} \right) = {\left[ {{c_1}\left( {{\phi _i}} \right),{c_2}\left( {{\phi _i}} \right), \cdots ,{c_M}\left( {{\phi _i}} \right)} \right]^{\rm{T}}} $为阵列流型,其第m个元素可表示为:
$$ {c_m}({\phi _i}) = {f_m}({\phi _i}){{\rm{e}}^{ - {\rm{j}}2{\rm{\pi }}d\sin {\phi _i}(m - 1)/\lambda }} $$ (2) 式中,$ {f_m}({\phi _i}) $为第m阵元的场模式;λ为载波波长。式(1) 的接收信号可写为如下的积分形式:
$$ \mathit{\boldsymbol{y}}(t) = \int {\int {\mathit{\boldsymbol{c}}(\phi )h(\phi ,\tau )s(t - \tau ){\rm{d}}\tau {\rm{d}}\phi + \mathit{\boldsymbol{n}}(t)} } $$ (3) 式中,$ h(\phi, \tau ) $是角度-时延扩展函数。平均角度-时延扩展函数为[15]:
$$ \begin{array}{c} P(\phi, \tau ) = {\rm{E}}\{ {P_{inst}}(\phi, \tau )\} = \\ {\rm{E}}\left\{ {\sum\limits_{i = 0}^{I - 1} {{{\left| {{\alpha _i}} \right|}^2}\delta (\phi - {\phi _i}, \tau - {\tau _i})} } \right\} \end{array} $$ (4) 式中,$ {P_{{\rm{inst}}}}(\phi, \tau ) = \sum\limits_{i = 0}^{I - 1} {{{\left| {{\alpha _i}} \right|}^2}\delta (\phi - {\phi _i}, \tau - {\tau _i})} $为瞬时角度-时延谱。角度扩展定义为角度功率谱的二阶中心矩:
$$ {\sigma _A} = \sqrt {\int {{{(\phi - {\phi _0})}^2}{P_A}(\phi ){\rm{d}}\phi } } $$ (5) 式中,$ {P_A}(\phi ) = \int {P(\phi, \tau )} {\rm{d}}\tau $为角功率谱函数;$ {\phi _0} = \int {\phi {P_A}} (\phi ){\rm{d}}\phi $为中心波达方向。时延扩展定义为时延功率谱的二阶中心矩:
$$ {\sigma _D} = \sqrt {\int {{{(\tau - {\tau _0})}^2}{P_D}(\tau ){\rm{d}}\tau } } $$ (6) 式中,$ {P_D}(\tau ) = \int {P(\phi, \tau )} {\rm{d}}\phi $为时延功率谱函数;$ {\tau _0} = \int {\tau {P_D}} (\tau ){\rm{d}}\tau $为平均时延。室内定位问题就是根据有噪声的接收信号y(t)估计目标s(t)的位置(x, y)。
-
首先对目标区域进行格点化,假设格点数为K,在每个格点放置单天线发射信号,利用M个接收阵元的均匀线阵进行接收,假设采样时刻为t=1, 2, …, N,共采样N个快拍,在第k个格点发射信号s(t),阵列的N个快拍接收信号矩阵记为M×N矩阵$ {\mathit{\boldsymbol{Y}}_k} = \left[ {\mathit{\boldsymbol{y}}_1^k,\mathit{\boldsymbol{y}}_2^k, \cdots ,\mathit{\boldsymbol{y}}_N^k} \right] $,则在第k个格点,协方差矩阵、信号强度、信号子空间及四阶累积量指纹矢量gki(i=1, 2, 3, 4分别对应4种指纹)的获取方法分别如下:
1) 协方差矩阵指纹:
$$ {\mathit{\boldsymbol{\hat R}}_k} = \frac{1}{N}{\mathit{\boldsymbol{Y}}_k}\mathit{\boldsymbol{Y}}_k^{\rm{H}} $$ (7) 为了方便后续的分类器训练,通过矢量化操作,将协防差矩阵变为M2×1维协方差指纹矢量$ \mathit{\boldsymbol{g}}_k^1 = {\rm{vec(}}{\mathit{\boldsymbol{\hat R}}_k}{\rm{)}} $,其中,vec(·)为矢量化算子。
2) 信号强度指纹:
$$ {{{\boldsymbol{\mathrm{RSS}}}}_k} = {\rm{vec(diag(}}{\mathit{\boldsymbol{\hat R}}_k}{\rm{))}} $$ (8) 式中,diag(·)为取对角线元素。因此,M×1的信号强度指纹矢量可表示为$ \mathit{\boldsymbol{g}}_k^2 = 10\lg ({{{\boldsymbol{\mathrm{RSS}}}}_k} ) $,单位为dBm。
3) 信号子空间指纹:
令协方差矩阵的特征分解为:
$$ {\mathit{\boldsymbol{\hat R}}_k} = {\mathit{\boldsymbol{U}}^k}{\mathit{\boldsymbol{ \boldsymbol{\varSigma} }}^k}{({\mathit{\boldsymbol{U}}^k})^{\rm{H}}} = \left[{\mathit{\boldsymbol{U}}_s^k{\rm{ }}\mathit{\boldsymbol{U}}_n^k} \right]\left[{\begin{array}{*{20}{c}} {\mathit{\boldsymbol{ \boldsymbol{\varSigma} }}_s^k}&\mathit{\boldsymbol{0}}\\ \mathit{\boldsymbol{0}}&{\mathit{\boldsymbol{ \boldsymbol{\varSigma} }}_n^k} \end{array}} \right]\left[{\begin{array}{*{20}{c}} {{{(\mathit{\boldsymbol{U}}_s^k)}^{\rm{H}}}}\\ {{{(\mathit{\boldsymbol{U}}_n^k)}^{\rm{H}}}} \end{array}} \right] $$ (9) 式中,Usk和Unk分别为大特征值和小特征对应的特征向量构成的信号子空间及噪声子空间。实际环境中,由于多径传播的影响,$ {\mathit{\boldsymbol{\hat R}}_k} $的大特征值可能为多个,但本文只选取第一个大特征值对应的特征矢量作为信号子空间矢量,因为它反映了环境的主要信息,即:
$$ \mathit{\boldsymbol{u}}_1^k = \mathit{\boldsymbol{U}}_s^k\left( {:, 1} \right) $$ (10) 于是,可以得到M×1的信号子空间指纹$ \mathit{\boldsymbol{g}}_k^3 = \mathit{\boldsymbol{u}}_1^k $,无量纲。
4) 四阶累积量指纹:
四阶累积量的计算法方法为:
$$ \begin{array}{c} {{\mathit{\boldsymbol{\hat C}}}_k}({l_1}, {l_2}, {l_3}, {l_4}) = {\rm{cum}}\{ {y_{{l_1}}}, {y_{{l_2}}}, y_{{l_3}}^ *, y_{{l_4}}^ * \} = \\ {\rm{E}}\{ {y_{{l_1}}}{y_{{l_2}}}y_{{l_3}}^ * y_{{l_4}}^ * \} - {\rm{E}}\{ {y_{{l_1}}}y_{{l_3}}^ * \} {\rm{E}}\{ {y_{{l_2}}}y_{{l_4}}^ * \} - \\ {\kern 1pt} {\kern 1pt} {\rm{E}}\{ {y_{{l_1}}}y_{{l_4}}^ * \} {\rm{E}}\{ {y_{{l_2}}}y_{{l_3}}^ * \} - {\rm{E}}\{ {y_{{l_1}}}{y_{{l_2}}}\} {\rm{E}}\{ y_{{l_3}}^ * y_{{l_4}}^ * \} \end{array} $$ (11) 式中,$ {\rm{E}}\{ {y_{{l_i}}}y_{{l_j}}^ * \} = \frac{1}{N}\sum\limits_{t = 1}^N {{y_{{l_i}}}(t)} y_{{l_j}}^ * (t) $;$ {\rm{E}}\{ {y_{{l_i}}}{y_{{l_j}}}y_{{l_m}}^ * y_{{l_n}}^ * \} = \frac{1}{N}\sum\limits_{t = 1}^N {{y_{{l_i}}}(t){y_{{l_j}}}(t)y_{{l_m}}^ * (t)y_{{l_n}}^ * (t)} $分别为接收信号y(t)的二阶矩和四阶矩;[·]*为共轭算子。为了方便后续的分类器训练,同样矢量化上述的四阶累积量矩阵,得到M×1维指纹矢量$ \mathit{\boldsymbol{g}}_k^4 = {\rm{vec}}({\mathit{\boldsymbol{\hat C}}_k}) $。
上述4种指纹中,信号强度指纹反映了接收阵列和目标信号之间的物理上的空间位置关系;信号协方差矩阵是随机过程的二阶统计量,该统计量对高斯噪声很具有很好的抑制作用;信号子空间指纹相当于主成份分析,其对多径传播、信道环境的变化具有一定的稳健性;而四阶累积量指纹则对色噪声具有一定的抑制效果。因此这4种指纹构成的群指纹库可充分发挥指纹的集群优势,为后续的室内定位算法提供丰富的参考信息模版。
-
基于群指纹多分类D-S证据理论的高精度定位算法主要包括基于神经网络的分类器训练及基于证据理论的在线分类结果融合两个部分。现分别介绍如下。
-
假设BP神经网络的输入、输出及隐含层节点个数分别为Q、R和S。定义$ \mathcal{F} = \{ \mathit{\boldsymbol{g}}_1^i, \mathit{\boldsymbol{g}}_2^i, \cdots, \mathit{\boldsymbol{g}}_K^i\} $为包含K个格点位置的指纹向量的待分类群指纹库,其中gki为用第2节方法获取的k点指纹向量,其中上标i=1, 2, 3, 4表示指纹类型。隐含层输出矢量$ \mathit{\boldsymbol{h}}_k^i = {[h_{k1}^i, h_{k2}^i, \cdots, h_{kR}^i]^{\rm{T}}} $, 输出层的输出矢量$ \mathit{\boldsymbol{o}}_k^i = {[o_{k1}^i, o_{k2}^i, \cdots, o_{kS}^i]^{\rm{T}}} \in {{\rm{\mathbb{R}}}^\mathcal{S}} $,其中$ \mathcal{S} $为空间划分的格点个数。一般来说,如果不用聚类等算法先对空间格点聚类,则$ \mathcal{S} = K $, 否则$ \mathcal{S} \le K $。期望矢量,则隐含层和输入层之间的权值矩阵$ \mathit{\boldsymbol{V}} = {[{v_{qr}}]_{Q \times R}} $,隐含层到输出层之间的权值矩阵$ \mathit{\boldsymbol{W}} = {[{w_{rs}}]_{R \times \mathcal{S}}} $,隐含层的输出$ h_{kr}^i = f\left( {\sum\limits_{q = 1}^Q {v_{qr}^ig_{kq}^i} } \right) $,输出层的输出$ o_{ks}^i = f\left( {\sum\limits_{r = 1}^R {w_{rs}^ih_{kr}^i} } \right) $。f(·)为激活函数,第i种指纹神经网络输出的均方误差表达式为:
$$ E_k^i = \frac{1}{2}\sum\limits_{s = 1}^\mathcal{S} {{{(d_{ks}^i - o_{ks}^i)}^2}} $$ (12) 三层神经网络的权值调整规则为:
$$ \left\{ \begin{array}{l} \Delta w_{rs}^i = \eta (d_{ks}^i - o_{ks}^i)o_{ks}^i(1 - o_{ks}^i)h_{kr}^i\\ \Delta v_{qr}^i = \eta \left( { - \sum\limits_{k = 1}^K {\frac{{\partial E_k^i}}{{\partial {o_k}}}f(w_{rs}^ih_{kr}^i)} } \right)h_{kr}^i(1 - h_{kr}^i)g_{kq}^i \end{array} \right. $$ (13) 权值调整公式为:
$$ \left\{ \begin{array}{l} w_{rs}^i = w_{rs}^i + \eta \Delta w_{rs}^i\\ v_{qr}^i = v_{qr}^i + \eta v_{qr}^i \end{array} \right. $$ (14) 式中,η为学习步长。通过设置神经网络的输入层、隐含层及输出层的节点个数,步长、激活函数f(·)和门限等参数即可设计神经网络。
-
D-S证据理论是利用概率的上下限来处理不确定性数学问题。经典的概率理论可认为是D-S理论的特殊情况。两者的基本区别在于对无先验信息的处理方法的不同。概率论在对某一事件的出现与否没有先验信息时会强加一个概率,而D-S证据理论对无先验信息的事件则不做任何处理。现简述一下该理论的基本思路[13]:
假设Ω是变量$ \mathcal{X} $的所有可能元素的集合(论域),并且Ω的元素互相独立,个数为$ \mathcal{N} $,则Ω的幂集合2Ω的元素个数为$ {2^\mathcal{N}} $,幂集合中的每个元素都对应于变量$ \mathcal{X} $的一个命题。对于Ω中的子集$ {\mathcal{A}} $,若存在m∈[0, 1],使得:
1) m(Ø),Ø称为空集或不可能事件;
2) $ \sum\limits_{{\mathcal{A}} \in \Omega } {m\left( {\mathcal{A}} \right)} = 1 $。
则称m为2Ω的基本概率分配函数(BPA),在D-S理论中习惯上把对证据的信任程度的BPA称为质量(MASS),其中$ {m\left( \mathcal{A} \right)} $为$ \mathcal{A} $的基本概率值。
定义命题的信任函数(Belief)为:
$$ \begin{array}{l} \;\;\;\;\;\;{\rm{BEL}}:{2^\mathit{\Omega} } \to \left[{0, 1} \right]\\ {\rm{BEL}}\left( \mathcal{A} \right) = \sum\limits_{\mathcal{B} \in \mathcal{A}} {m\left( \mathcal{B} \right)}, {\rm{ }}\forall \mathcal{A} \in {\mathit{\Omega}} \end{array} $$ $ {\rm{BEL}}\left( \mathcal{A} \right) $代表$ \mathcal{A} $所有子集可能值的总和,描述了关于命题$ \mathcal{A} $的最终信任度。
定义命题的似然度函数(Plausibility)为不支持也不反对该命题的度量,可表示为:
$$ {\rm{PLS}}\left( {\mathcal{A}} \right) = 1 - {\rm{BLE}}\left( {\overline {\mathcal{A}} } \right){\rm{ = }}1 - \sum\limits_{{\mathcal{B}} \cap {\mathcal{A}}{\rm{ = }}\emptyset } {m\left( {\mathcal{B}} \right)} $$ $ {\rm{BLE}}\left( {{\mathcal{A}} } \right) $和$ {\rm{PLS}}\left( {{\mathcal{A}} } \right) $分别表示了命题的上下界函数。一般满足$ {\rm{BEL}}\left( {\mathcal{A}} \right){\rm{ = }} \le {\rm{PLS}}\left( {\mathcal{A}} \right) $。命题$ \mathcal{A} $的不确定度为$ {\rm{PLS}}\left( {\mathcal{A}} \right) - {\rm{BEL}}\left( {\mathcal{A}} \right) $,不确定度越小,支持命题$ \mathcal{A} $的确定度就越高。当$ {\rm{PLS}}\left( {\mathcal{A}} \right) $和$ {\rm{BEL}}\left( {\mathcal{A}} \right) $相等,即为贝叶斯概率。
D-S证据理论的联合规则可表述为:对$ \forall \mathcal{A} \in \mathit{\Omega } $,识别框架Ω上的有限个BPA,m1, m2, …, mn,则D-S证据理论的多证据合成规则为:
$$ \left( {{m_1} \oplus {m_2} \oplus \cdots \oplus {m_n}} \right){\mathcal{A}} = \frac{{{k_1}}}{{\mathcal{K}}} $$ (15) $$ \left\{ \begin{array}{l} {k_1} = \sum\limits_{{{\mathcal{A}}_1} \cap {{\mathcal{A}}_2} \cap \cdots \cap {{\mathcal{A}}_n} = {\mathcal{A}}} {{m_1}\left( {{{\mathcal{A}}_1}} \right){m_2}\left( {{{\mathcal{A}}_2}} \right) \cdots {m_n}\left( {{{\mathcal{A}}_n}} \right)} \\ {\mathcal{K}} = \sum\limits_{{{\mathcal{A}}_1} \cap {{\mathcal{A}}_2} \cap \cdots \cap {{\mathcal{A}}_n} \ne \emptyset } {{m_1}\left( {{{\mathcal{A}}_1}} \right){m_2}\left( {{{\mathcal{A}}_2}} \right) \cdots {m_n}\left( {{{\mathcal{A}}_n}} \right)} \end{array} \right. $$ (16) 式中,⊕表示正交和或直接和。D-S证据理论的多证据融合规则可使得多个证据的MASS最终组合为最终的一个组合MASS。
-
基于D-S理论的BP神经网络分类器融合方法的思路如下:首先,根据前面生成的4种指纹对BP神经网络进行泛化学习,把学习后的神经网络作为分类器,得到目标BPA,即为D-S证据理论的基本概率分配函数;然后采用D-S证据理论对分类结果进行融合处理。其流程如图 2所示。

图 2 基于D-S理论的BP神经网络分类器融合方法
为了方便理解,把基于D-S理论的BP神经网络分类器融合方法的流程总结于算法1中。
算法1:基于D-S理论的BP神经网络分类器融合算法
输入:群指纹库(4种指纹);BP神经网络参数;
输出:目标位置估计。
步骤1) 训练阶段
for i=1:4
for k=1: K
① 输入第i个指纹和期望输出进行归一化,同时计算神经网络的隐含层输出和实际输出;
② 用式(12) 计算输出层误差;
if Eki<ε
跳出;
else
用式(14) 进行修正权值;
end
③ 获取第i类指纹的强神经网络分类器;
end
end
步骤2) 定位阶段
① 对在线数据计算4种实测指纹;
for i=1:4
② 将第i类实测指纹的N个样本输入到第i类指纹的神经网络分类器;
③ 计算第i个神经网络的输出并除以总样本数N转换成目标BPA;
end
④ 对目标BPA进行多证据融合;
⑤ 根据融合结果,选出最大的BPA出现的位置,给出目标位置估计;
结束
-
采用5个阵元的均匀线阵,阵元间距为半波长,载波频率为750 MHz,接收阵列放在10 m×10 m的一个方形室内空间,阵列高度1 m,坐标位置[0, 0]T。首先对室内空间进行格点化,格点间距1 m,总共100个格点;在每个格点利用格点和阵元的位置关系计算中心到达角,根据IST-METRA模型[16],假设接收阵列端的角功率分布函数为[-20º, 20º]内的均匀分布。在每个格点,时延扩展函数也假设服从均匀分布,多径的幅度服从锐利分布,每个点处接收站的多径时延条数为[0, 10]的均匀分布,时延在[0, 1]μs内服从均匀分布,信噪比为0~20 dB的高斯白噪声被分别加到式(1) 的接收信号中。对获取的信号进行4种变换,获取4种指纹,组建群指纹库。把4种指纹分别作为神经网络的输入,训练BP神经网络。神经网络的输入层神经元个数和每个指纹的维数相同,输出层神经元个数为100(对应格点个数),隐含层神经元个数可随意选取,这里选为200,门限ε=0.01。
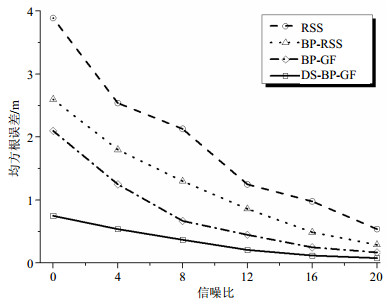
在定位阶段,选择感兴趣的定位格点,重新发射信号,在接收阵列获取在线测试信号,快拍数256,同时对该信号进行4种变换,获取4种在线测试统计量用于定位测试。本次实验考虑信噪比为0~20 dB,每个实验都基于50次独立仿真,用于改善随机误差。对比的算法包括:1) 利用单信号强度指纹直接匹配方法进行定位(RSS);2) 将单信号强度指纹输入BP神经网络进行定位(BP-RSS);3) 将群指纹输入BP神经网络进行定位(BP-GF);4) 将4种指纹分别输入BP神经网络,并利用D-S证据理论进行融合定位(DS-BP-GF)。其中BP-GF方法仅根据最大的BP神经网络输出确定定位结果。均方根定位误差的定义为:
$$ E = \sqrt {\frac{1}{N}\sum\limits_{i = 1}^N {{{(x - {{\hat x}_i})}^2} + {{(y - {{\hat y}_i})}^2}} } $$ (17) 由于本文算法会受格点距离划分的影响,因此统计正确识别率为距离真实格点位置小于或等于1个格点距离的位置估计均为正确结果。
图 3给出了4种方法的定位均方根误差性能曲线。从图中可以看出,本文提出的基于群指纹多分类证据理论融合算法具有最好的定位精度,单指纹方法的定位性能最差,而基于神经网络分类的多指纹方法总体优于单指纹方法。

图 3 高斯噪声下4种方法的定位均方误差比较结果
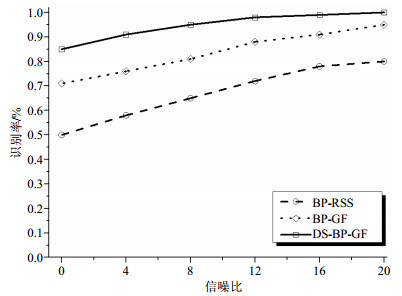
图 4给出了3种算法的识别率比较结果,实验同样是在50次独立实验中进行统计,由于经典的RSS指纹匹配方法不是采用神经网络学习的模式,因此曲线并没有统计该算法的识别率。从识别率统计看,本文提出的基于群指纹多分类D-S证据融合的算法具有最好的识别率,在相同的信噪比条件下其他算法的识别率明显降低。上述结果验证了本文算法的可行性。

图 4 高斯噪声下3种方法的识别率比较
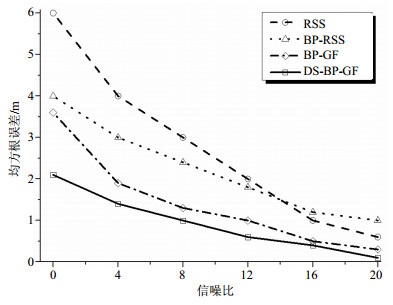
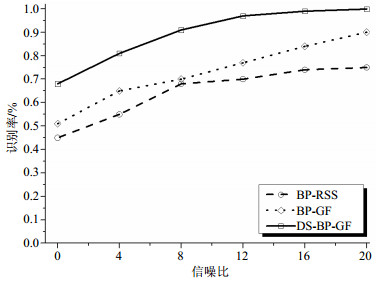
图 5和图 6分别给出了在色噪声条件下几种算法的定位均方误差和识别率比较结果,其中色噪声用模型为$ u(n) = - {a_1}u(n - 1) - {a_2}u(n - 2) + v(n) $的二阶AR模型产生,其中v(n)为零均值、方差为σ2的高斯白噪声序列。系数a1=-0.195,a2=0.95。从图 5和图 6可以看出,在色噪声环境下,本文给出的算法从定位误差和识别率上都具有较高的精度和稳健性。该仿真结果同样验证了本文算法的有效性和可行性。

图 5 色噪声下4种方法的定位均方误差比较

图 6 色噪声下3种方法的识别率比较
-
本文提出了一种基于室内接收阵列的群指纹多分类证据理论融合高精度定位算法,该算法利用阵列接收模型,获取比传统RSS指纹更加丰富的群指纹信息模版,用于后续的定位分析。考虑到神经网络具有良好的非线性学习能力,本文在离线训练阶段,先利用神经网络对群指纹进行离线学习,获得多个神经网络分类器;在定位阶段用实测定位数据对实测后的数据进行预测,并对预测的结果利用D-S证据理论进行定位信息融合,该过程降低了传统单一指纹、单一神经网络分类及预测结果的不确定性,在一定程度上可改善神经网络的输出误差。
本文提出的群指纹建库思路可有效解决单一指纹的信息模版不足问题,充分发挥指纹的集群优势;而基于证据理论的信息融合方法为最大化利用指纹的集群优势提供了解决思路。本文的方法对不同的噪声环境和丰富的室内多径传播具有较好的稳健性。理论分析和仿真结果都表明了算法的有效性及可行性。
A New Indoor Localization Algorithm by Fusing Group of Fingerprints via Dampster-Shafer Evidence Theory
-
摘要: 室内定位的主要挑战是室内的多径传播及非平稳信道环境,传统基于信号强度指纹的单指纹室内定位方法由于受环境变化影响较大,稳健性较差且精度较低。针对此问题,提出一种基于D-S证据理论的群指纹融合高精度室内定位方法。在建库阶段,利用室内阵列信号接收模型,首先通过计算阵列接收信号的不同统计特性构建包括信号强度、协方差矩阵、信号子空间及四阶累积量组成的群指纹库,再对群指纹进行神经网络训练获取针对每种指纹的神经网络分类器;在实测阶段,把实测数据的上述4种变换输入到训练好的神经网络分类器中,最后利用D-S证据理论对神经网络分类器的分类结果进行融合,给出最终的定位结果。仿真结果证明了算法的有效性及可行性。该算法可充分发挥指纹信息的集群效应,对噪声、多径传播等具有较好的稳健性,是一种高精度的室内定位新方法。Abstract: The main challenges of indoor localization come from multi-path propagation and non-stationary channel environment. Some classical localization approaches based on single received signal strength (RSS) fingerprint show low accuracy and bad robustness due to some environment changes. In this paper, we propose an accurate indoor localization algorithm by fusing group of fingerprints via Dampster-Shafer (D-S) evidence theory. The main idea can be summarized as follows:in off-line phase, first, based on the received data from a receiving array deployed in indoor environment, we calculate four fingerprints, namely, RSS, covariance matrix, signal subspace, and fourth-order cumulant. Secondly, these fingerprints are input to train four different classifiers by using back-propagation (BP) neural networks. In on-line phase, by calculating the corresponding transformations of the received signals of the array, we can obtain the predictions of these classifiers; then, we use D-S evidence theory to fuse the final localization results. The proposed algorithm can deal with different environment noise adaptively and show higher accuracy compared with some existing fingerprint-based algorithms. The performance of our proposed algorithm is verified by simulation results.
-
[1] GUO X, CHU L, SUN X. Accurate localization of multiple sources using semidefinite programming based on incomplete range matrix[J]. IEEE Sensors Journal, 2016, 16(13):5319-5324. doi: 10.1109/JSEN.2016.2558184 [2] WANG Y, MA S D, CHEN C L P. TOA-based passive localization in Quasi-synchronous networks[J]. IEEE Communications Letters, 2014, 18(4):592-595. doi: 10.1109/LCOMM.2014.021214.132662 [3] LI S H, HELDLEY M, COLLINGS I B, et al. TDOA-based localization for semi-static targets in NLOS environments[J]. IEEE Wireless Communications Letters, 2015, 4(5):513-516. doi: 10.1109/LWC.2015.2449306 [4] JIANG L, TAN S Y. Simple geometrical-based AOA model for mobile communication systems[J]. Electronics Letters, 2004, 40(19):1203-1205. doi: 10.1049/el:20045599 [5] 李葆仓. 基于空间谱群指纹的高精度室内定位方法研究[D]. 成都: 电子科技大学, 2015. LI Bao-cang. Research on high resolution indoor positioning method based on spatial spectrum fingerprints[D]. Chengdu:University of Electronic Science and Technology of China, 2015. [6] 万群, 郭贤生, 陈章鑫.室内定位理论、方法及应用[M].北京:电子工业出版社, 2012. WAN Qun, GUO Xian-sheng, CHEN Zhang-xin. Theory, methods, and applications of indoor localization[M]. Beijing:Electronic Industry Press, 2012. [7] GUO X S, CHU L, LI B C, et al. A robust vector matching localization approach based on multiple channels SSD fingerprinting of ZigBee networks[J]. Progress in Electromagnetics Research, 2014, 144:133-140. doi: 10.2528/PIER13112004 [8] GOGOLAK L, PLETL S, KUKOLJ D. Neural network-based indoor localization in WSN environments[J]. ACTA Polytechnica Hungarica, 2013, 10(6):221-235. https://www.inf.u-szeged.hu/printpdf/1741 [9] ZHANG W, LIU K, ZHANG W D, et al. Deep neural networks for wireless localization in indoor and outdoor localization[J]. Neurocomputing, DOI: 10.1016/j.neucom.2016.02.055. [10] DAI H, YING W H, XU J. Multi-layer neural network for received signal strength-based indoor localization[J]. IET Commnications, 2016, 10(6):717-723. doi: 10.1049/iet-com.2015.0469 [11] DEMPSTER A P. Upper and lower probabilities induced by a multivalued mapping[J]. Annals of Mathematical Statistics, 1967, 38(2):325-339. doi: 10.1214/aoms/1177698950 [12] 罗志增, 蒋静萍.基于D-S理论的多信息融合方法及应用[J].电子学报, 1999, 27(9):100-102. http://youxian.cnki.com.cn/yxdetail.aspx?filename=ZGDC20171013007&dbname=CAPJ2015 LUO Zhi-zeng, JIANG Jing-ping. Multiple information fusion method and application based on D-S evidence theory[J]. Acta Electronica Sinica, 1999, 27(9):100-102. http://youxian.cnki.com.cn/yxdetail.aspx?filename=ZGDC20171013007&dbname=CAPJ2015 [13] 徐从富, 耿卫东, 潘云鹤.面向数据融合的DS方法综述[J].电子学报, 2001, 29(3):393-396. http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU200103026.htm XU Cong-fu, GENG Wei-dong, PAN Yun-he. Review of data fusion method based on DS theory[J]. Acta Electronica Sinica, 2001, 29(3):393-396. http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU200103026.htm [14] KASEBZADEH P, GRANADOS G S, LOHAN E S. Indoor localization via WLAN path-loss models and Dempster-Shafer combining[C]//International Conference on Localization and GNSS (ICL-GNSS 2014). Helsinki, Finland:IEEE, 2014. [15] GUO X S, WAN Q, YANG W L, et al. Low-complexity decouple DOAs estimation algorithm for 2D coherently distributed sources[J]. Sci China Ser F-Inf Sci, 2009, 52(5):835-842. doi: 10.1007/s11432-009-0025-9 [16] FONOLLOSA J R, GASPA R, MESTRE X, et al. The IST METRA project[J]. IEEE Commun Mag, 2002, 40:78-86. http://ieeexplore.ieee.org/xpl/articleDetails.jsp?tp=&arnumber=1018011&contentType=Journals+%26+Magazines&queryText%3D%28tdd%3Cin%3Ede%29 -

 点击查看大图
点击查看大图

图(6)
计量
- 文章访问数: 4187
- HTML全文浏览量: 1257
- PDF下载量: 141
- 被引次数: 0
