 ISSN
ISSN 


 下载:
下载:
-
双视显示是近年来出现的一种新型显示技术,它在一个显示器上同时显示两个不同的画面,在不同观看方向上的观看者只能看到其中一个画面,从而实现在一个显示器上同时满足多个观看者的不同需求[1]。最初的双视显示技术存在3个明显的缺点:需要观看者额外佩戴观看滤镜,影响观看的舒适度;画面的分辨率降低为原来的一半;显示画面为2D画面,无法实现3D显示。
国内外研究人员提出了多种技术方案对现有的双视显示技术进行改进:采用狭缝光栅或者柱透镜光栅替代观看滤镜实现裸眼双视显示;采用图案电极实现全分辨率裸眼双视显示;采用时分复用技术实现全分辨率裸眼双视显示[2-5]。但是,基于以上方法的双视显示均为2D显示。
文献[6]首次提出集成成像。与其他3D显示相比,如眼镜式助视3D显示、头盔式助视3D显示、光栅3D显示、体3D显示和全息3D显示等,集成成像3D显示具有全视差、连续视点、适合多人观看、无需助视设备和相干光源、结构简单和成本低廉等优点[7]。因此,集成成像3D显示具有巨大的研究价值和广泛的应用前景,已经成为众多科研机构和跨国公司的重点研究对象之一。
文献[8]将集成成像3D显示与双视显示技术结合,提出并实现集成成像双视3D显示,同时实现了双视和裸眼3D显示。在该成果的基础上,文献[9]提出并实现了基于偏振光栅的裸眼双视3D显示,文献[10]提出并实现了投影型裸眼双视3D显示,文献[11]提出并实现了基于正交偏振阵列的裸眼双视3D显示。
然而,上述集成成像双视3D显示仍然存在分辨率较低等缺点。一维集成成像3D显示通过采用狭缝光栅来取代二维集成成像3D显示中的微透镜阵列,可以增加3D图像的垂直或水平分辨率[12]。因此,本文提出一种基于狭缝光栅的一维集成成像双视3D显示。
-
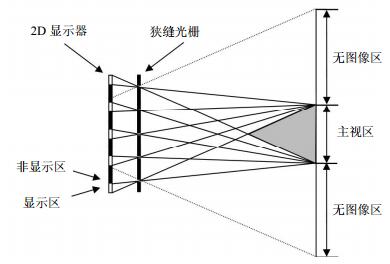
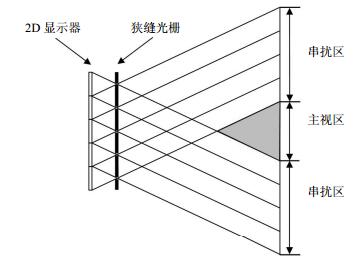
在传统的一维集成成像3D显示中,微图像阵列中每一个图像元经过它所对应的狭缝的成像区域都是一个大小相等的区域,如图 1所示。传统的一维集成成像3D显示的主视区是微图像阵列中所有图像元的成像区域的公共部分,观看者能够在主视区内观看到具有正确视差的完整的3D图像。在主视区的两侧则是串扰区。

图 1 传统的一维集成成像3D显示视区分布图
将微图像阵列中每一个图像元对应于主视区的部分定义为显示区,将微图像阵列中每一个图像元对应于串扰区的部分定义为非显示区,如图 2所示。如果2D显示器只显示微图像阵列中显示区的信息,同时不显示微图像阵列中非显示区的信息,那么传统的一维集成成像3D显示的主视区不变,同时将会使得传统的一维集成成像3D显示中的串扰区变成了无图像区。

图 2 非显示区与无图像区的对应示意图
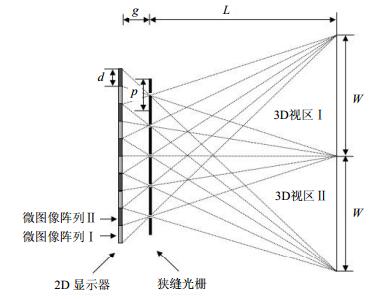
将两个参数相同的一维集成成像3D显示的微图像阵列的显示区分别向左和向右移动一定距离,那么两个一维集成成像3D显示中的主视区和无图像区则会分别向右和向左移动一定距离。如果第一个一维集成成像3D显示的主视区刚好对应第二个一维集成成像3D显示的无图像区,而且第二个一维集成成像3D显示的主视区也刚好对应第一个一维集成成像3D显示的无图像区,那么将两个一维集成成像3D显示的微图像阵列的显示区同时显示在一个2D显示器上则会形成两个刚好不相交的主视区,如图 3所示。如果两个一维集成成像3D显示的微图像阵列分别从两个不同的3D场景获取,那么观看者在不同观看方向上将会观看到两个不同的3D图像。

图 3 一维集成成像双视3D显示原理和参数图
-
基于狭缝光栅的一维集成成像双视3D显示包括2D显示器和狭缝光栅。狭缝光栅包含m个狭缝,狭缝的节距为p,图像元的节距为d,最佳观看距离为L。
图像元的节距d可以通过下式计算得到:
$$ d = \frac{{(L + g)p}}{{2L}} $$ (1) 根据图 3中的几何关系,一维集成成像双视3D显示的3D视区Ⅰ和3D视区Ⅱ的宽度W为:
$$ W = \frac{{(L + g)p}}{g} $$ (2) 由于一维集成成像双视3D显示的3D视区Ⅰ和3D视区Ⅱ的宽度与传统的一维集成成像3D显示的主视区宽度相等,所以3D视区Ⅰ和3D视区Ⅱ的宽度W也可以用下式表达[12]:
$$ W = \frac{{Lp}}{g}-(m-1)p $$ (3) 根据式(2)和式(3)可以计算得到基于狭缝光栅的一维集成成像双视3D显示的最佳观看距离L为:
$$ L = (2m-1)g $$ (4) 由式(4)可以看出,基于狭缝光栅的一维集成成像双视3D显示的最佳观看距离与狭缝的个数成正比。即基于狭缝光栅的一维集成成像双视3D显示的最佳观看距离随着图像显示设备的尺寸增大而增大。在最佳观看距离L处,基于狭缝光栅的一维集成成像双视3D显示的每个视区的观看视角为:
$$ \theta = \arctan \left[{\frac{{mp}}{{(2m-1)g}}} \right] $$ (5) -
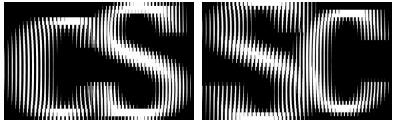
实验首先利用3D Studio Max建立两个虚拟的3D场景,左边的3D场景包括两个字母“CS”,右边的3D场景是两个字母“SC”,两个3D场景的左边字母和右边字母中心位置的X轴、Y轴和Z轴坐标分别为-10、+45、0 mm和+10、-40、0 mm。因此,3D场景左边字母凸出显示屏,右边字母则凹进显示屏。本文实验采用像素映射的方法,利用Matlab软件将3D Studio Max软件获得的每一个图像元上的所有像素都分别映射,再合成得到两个传统一维集成成像3D显示的微图像阵列,如图 4所示。

图 4 两个传统一维集成成像3D显示的微图像阵列
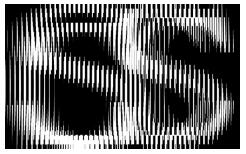
利用Matlab软件将两个传统的一维集成成像3D显示的微图像阵列中的显示区提取出来,合成一维集成成像双视3D显示的微图像阵列,如图 5所示。

图 5 一维集成成像双视3D显示的微图像阵列
实验建立了基于狭缝光栅的一维集成成像双视3D显示原型样机,参数设置如表 1所示。
表 1 一维集成成像双视3D显示原型样机参数
参数 p/mm g/mm L/mm m 值 2.5 3.6 364 51 -
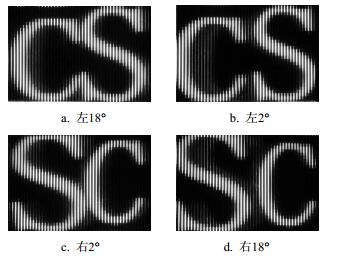
图 6是从不同观看角度观测到的基于狭缝光栅的一维集成成像双视3D显示原型样机重建的3D图像。如图 6a和图 6b所示,首先在左18°方向可以观察到正确显示的两个完整的字母“C”和“S”;然后从左2°方向观察到同样正确显示的两个完整的字母“C”和“S”,而且随着观看角度的变化,左边的字母“C”和右边的字母“S”的相对位置都发生改变,即基于狭缝光栅的一维集成成像双视3D显示原型样机能够正确地显示3D图像“CS”。如图 6c和图 6d所示,在右2°方向可以观察到正确显示的两个完整的字母“S”和“C”;从右18°方向可以观察到正确显示的两个完整的字母“S”和“C”,而且随着观看角度的变化,左边的字母“S”和右边的字母“C”的相对位置都发生改变,即基于狭缝光栅的一维集成成像双视3D显示原型样机能够正确的显示3D图像“SC”。综上所述,观看者在基于狭缝光栅的一维集成成像双视3D显示原型样机的左和右两个观看方向上观看到两个不同的3D图像。

图 6 一维集成成像双视3D显示原型样机重建的3D图像
-
本文实现了一种基于狭缝光栅的一维集成成像双视3D显示,它包括显示微图像阵列的2D显示器和狭缝光栅。微图像阵列由两组图像元相间排列组成,两组图像元分别从两个不同的3D场景拍摄获取。观看者在左18°~左2°范围内观看到3D场景“CS”,而在右2°~右18°范围内观看到3D场景“SC”。该一维集成成像双视3D显示可以应用于车载显示屏、监视器、家庭影院以及医疗设备等。
One-Dimensional Dual-View Integral Imaging Three-Dimensional Display Based on Parallax Barrier
-
摘要: 集成成像双视3D显示是集成成像3D显示技术与双视显示技术的结合,可以在不同的观看方向上呈现不同的3D图像。但是,现有的集成成像双视3D显示存在分辨率较低的缺点。基于此,该文提出了一种基于狭缝光栅的一维集成成像双视3D显示。微图像阵列由两组图像元相间排列组成,两组图像元分别从两个不同的3D场景拍摄获取。首先根据几何光学推导出图像元节距与狭缝节距的数理关系,然后根据3D视区宽度推导出观看视角的计算公式,并分析了最佳观看距离与系统结构参数的数理关系。建立了一维集成成像双视3D显示样机,在左18°~左2°范围内观看到3D场景"CS",而在右2°~右18°范围内观看到3D场景"SC"。Abstract: Dual-view integral imaging (DVⅡ) three-dimensional (3D) display presents two different 3D images in the left and right viewing directions, respectively. However, the low resolution limits the applications of the DVⅡ 3D display. This paper proposes a one-dimensional DVⅡ 3D display based on a parallax barrier. The element image array is composed of two sets of alternating elemental images. The two sets of elemental images are captured from two different 3D scenes, respectively. The mathematical relation between the pitches of elemental image and slit is deduced through geometrical optics. According to the width of the 3D viewing zone, the calculation formula of the viewing angle is obtained. The mathematical relation between the optimal viewing distance and the parameters of the one-dimensional DVⅡ 3D display is also analyzed. A prototype of the one-dimensional DVⅡ 3D display based on the parallax barrier is developed to verify the principle. The 3D scene "CS" is obtained between 18° and 2° to the left, while the 3D scene 'SC' is seen between 2° and 18° to the right.
-
[1] KEAN D U, MONTGOMERY D J, BOURHILL G, et al. Multiple view display. US patent, 7154653B2[P]. 2006. [2] KRIJN M P C M, de ZWART S T, de BOER D K G, et al. 2-D/3-D displays based on switchable lenticulars[J]. Journal of the Society for Information Display, 2008, 16(8):847-855. doi: 10.1889/1.2966446 [3] CHEN C P, LEE J H, YOON T H, et al. Monoview/dual-view switchable liquid crystal display[J]. Optics Letters, 2009, 34(14):2222-2224. doi: 10.1364/OL.34.002222 [4] HSIEH C T, SHU J N, CHEN H T, et al. Dual-view liquid crystal display fabricated by patterned electrodes[J]. Optics Express, 2012, 20(8):8641-8648. doi: 10.1364/OE.20.008641 [5] CUI J P, LI Y, YAN J, et al. Time-multiplexed dual-view display using a blue phase liquid crystal[J]. Journal of Display Technology, 2013, 9(2):87-90. doi: 10.1109/JDT.2012.2231398 [6] LIPPMANN G. La photographie integrale[J]. Comptes Rendus Académie des Sciences, 1908, 146:446-451. http://www.scirp.org/reference/ReferencesPapers.aspx?ReferenceID=1769318 [7] KWON K C, ERDENEBAT M U, ALAM M A, et al. Integral imaging microscopy with enhanced depth-of-field using a spatial multiplexing[J]. Optics Express, 2016, 24(3), 2072-2083. doi: 10.1364/OE.24.002072 [8] WU F, DENG H, LUO C G, et al. Dual-view integral imaging three-dimensional display[J]. Applied Optics, 2013, 52(20):4911-4914. doi: 10.1364/AO.52.004911 [9] WU F, DENG H, LUO C G, et al. Dual-view integral imaging 3D display using polarizer parallax barriers[J]. Applied Optics, 2014, 53(10):2037-2039. doi: 10.1364/AO.53.002037 [10] JEONG J, LEE C K, HONG K, et al. Projection-type dual-view three-dimensional display system based on integral imaging[J]. Applied Optics, 2014, 53(27):G12-G18. doi: 10.1364/AO.53.000G12 [11] WANG Q H, JI C C, LI L, et al. Dual-view integral imaging 3D display by using orthogonal polarizer array and polarization switcher[J]. Optics Express, 2016, 24(1):9-16. doi: 10.1364/OE.24.000009 [12] ZHOU H Y, WU F, SHEN Y, et al. One-dimensional integral imaging display using a static barrier array[J]. Optik, 2016, 127(2):752-753. doi: 10.1016/j.ijleo.2015.10.132 -

 点击查看大图
点击查看大图
图(6) / 表(1)
计量
- 文章访问数: 3942
- HTML全文浏览量: 1347
- PDF下载量: 103
- 被引次数: 0
