 ISSN
ISSN 




-
机器人遥操作系统因为能够代替人在复杂或恶劣环境中进行作业,可以避免对人体产生伤害,降低生产成本,提高生产效率。机器人遥操作系统将人的经验智慧与机器人的优势相结合,实现了人的行为与感知能力的延伸,因此机器人遥操作在太空、深海、医疗手术、矿工业以及核工业等领域得到了广泛应用[1]。根据主从机器人的机械结构、自由度和工作空间是否相同,机器人遥操作系统又可以分为同构型和异构型。与同构型机器人遥操作系统相比,由于主从机器人在机械结构、自由度、通信方式和工作空间等方面的差异和不匹配,异构型机器人遥操作系统的控制面临着更大的挑战。文献[2]针对操作者同时进行远程和现场操作机器人时存在的复杂情况,提出了具有沉浸感的全景显示异构型遥操作系统,以提高操作者的临场感强度。文献[3]针对在深海等不确定性环境下利用异构型遥操作系统进行采矿的问题,提出了两种触觉反馈控制方法,提高任务性能及减少控制误差。文献[4]针对遥操作处理核废料的问题,提出了机器人自主技术的异构型遥操作系统,并分析了系统的稳定性。文献[5]设计了一套以KUKA工业机器人为从操作手的异构型遥操作系统,并提出了基于相对位姿尺度变换的遥操作控制算法。然而,上述工作并没有对目标物定位与接触控制进行研究。
为了实现机器人对目标物更精准的定位,更高效地完成工作,文献[6-8]提出了各种基于机器人视觉的目标物标定方法。而对于异构型遥操作系统而言,远端目标物的位置及外部环境信息的获取显得更为重要。文献[9]针对操作者无法知道机器人及其目标准确位置的问题,开发了一种视觉类人形远程操作系统,来获得视觉和位置信息。文献[10]开发了一种通过web界面遥操作的Nao机器人远程画面呈现系统,用于监控和判断从机器人所接触的环境。然而,上述研究主要是从机器人视觉的角度处理目标物的位置及外部环境,并没有从力反馈的角度加以考虑。
异构型机器人遥操作系统在复杂或恶劣环境下对目标物进行工程操作时,面临的情况更为复杂,如矿产勘查和工业焊接。在地下或水下的矿物勘探中,由于缺乏良好的力觉反馈,探矿者无法准确判断矿物的物理性质,如矿物质的刚度,从而不能正确识别矿物成分。在工业焊接中,由于力反馈的效果不好,工人缺乏对焊缝刚度的感受能力,无法准确地判断材料的硬化水平。在这些复杂环境下,不仅需要对目标物进行精确定位,同时还需要进一步对所接触物体的属性进行判断,此时,只凭借基于机器人视觉的传统标定方法是不够的。针对此类问题,本文提出了一种基于机器人工作空间映射匹配与直接力反馈的目标物定位与接触控制方法,利用自主设计的一套以Phantom Omni力触觉机器人为主机器人、SCARA工业四轴机器人为从机器人的异构型机器人遥操作系统进行了实验验证。本文的方法可使操作者准确接触到目标物及获取目标物的位置坐标信息,并进一步准确判断远端从机器人在外部环境中所接触的物体属性。
-
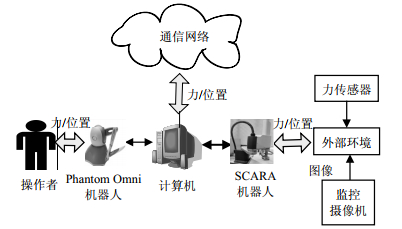
本文研究的异构型机器人遥操作系统主要包括:Phantom Omni力触觉机器人、SCARA四轴工业机器人、个人电脑、网络通信设备、力传感器和监控摄像机等,如图 1所示。其中,Phantom Omni机器人作为系统中的主机器人,SCARA机器人作为系统中的从机器人。一方面,操作者对近端的Phantom Omni主机器人产生作用力进行操纵,Phantom Omni产生的运动数据通过网络通信设备传递到SCARA从机器人端,使SCARA产生相应的运动数据,实现SCARA从机器人对Phantom Omni主机器人的位置跟踪。而另一方面,当SCARA从机器人需要与外部环境作用时,外部环境对SCARA的作用力可以通过力传感器进行测量,并将该作用力反馈至主端,让操作者确定SCARA从机器人开始与外界接触,开始注意力度与位置的控制范围。此时监控摄像机用于观察从端的现场,辅助操作者进行操作。

图 1 系统的结构图
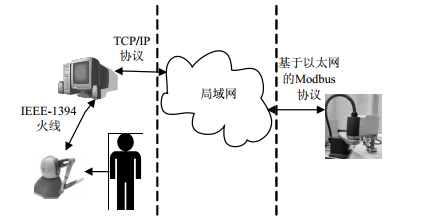
由于主从机器人的结构不同,图 1中的通信方式也不一样。为了对异构型机器人遥操作系统进行控制,网络通信是首先需要解决的问题。针对Phantom Omni机器人和SCARA机器人,本文设计的相应的网络通信如图 2所示。

图 2 异构型遥操作系统网络通信原理
由于Phantom Omni力触觉机器人主要采用串口通信的方式,通过IEEE-1394火线接口与外部设备进行通信,而SCARA四轴工业机器人则主要利用建立在RS-232C之上的Modbus通信通过网线接口与外部设备进行通信。所以,首先利用TCP/IP协议,通过无线路由器与计算机连接搭建一个局域网络;然后将Phantom Omni机器人接入搭建的局域网络;最后利用建立在以太网基础上的Modbus通讯,将SCARA机器人也接入此局域网络,实现主从机器人在局域网中的信息交换。
-
本文提出的基于机器人工作空间转换与直接力反馈相结合的系统目标物定位与接触控制方法,其总体思路为:先进行机器人从关节空间到工作空间的转换,然后找出Phantom Omni和SCARA两种异构型机器人的工作空间的理论范围并进行对比;再测量出在具体操作过程中,这两种机器人的机械臂所能到达的最大工作空间,并得到它们机械臂的工作空间中三维坐标系之间的数学关系式,对两种机器人不同的工作空间进行映射匹配;最后再结合力传感器,融入直接力反馈结构,并借助摄像机,达到异构型机器人遥操作系统进行目标物定位与接触控制的目的。
-
在关节空间下,一个n-自由度的遥操作系统中,主、从机器人的动力学模型可由如下二阶非线性微分方程描述[11]:
$${\pmb{M}}({\pmb{q}}){\pmb{\ddot q + C}}({\pmb{q, \dot q}}){\pmb{\dot q + G}}{\rm{(}}{\pmb{q}}){\pmb{ = }}\tau {\pmb{ + }}{{\pmb{J}}^{T} }{\pmb{f}}$$ (1) 式中,${\pmb{q}} \in {R^{n \times 1}}$表示关节角位置;${\pmb{M}} \in {R^{n \times n}}$表示惯量矩阵;${\pmb{C}}({\pmb{q, \dot q}}) \in {R^{n \times n}}$表示离心力和哥氏力项;${\pmb{G}}({\pmb{q}}) \in {R^{n \times 1}}$为重力项;$\tau \in {R^{n \times 1}}$为控制力矩输入;${\pmb{J}}({\pmb{q}}) \in {R^{n \times n}}$为雅可比矩阵;当机器人为主机器人时,${\pmb{f}} \in {R^{n \times 1}}$为操作者作用于主机器人的力(后文用${{\pmb{f}}_{{\rm{human}}}}$表示),当机器人为从机器人时,${\pmb{f}} \in {R^{n \times 1}}$为从机器人作用于环境的力(后文用${{\pmb{f}}_{{\rm{envi}}}}$表示)。
由于工作空间能更好地表示机器人与外部环境之间的接触,所以需要将关节空间下的遥操作系统动力学模型转换成用工作空间来表示。工作空间动力学可以将机器人末端执行器的加速度、速度与作用在其上的力关联起来。关节空间和工作空间变换关系为:
$${\pmb{\dot x = J\dot q}}$$ (2) $${\pmb{\ddot x = \dot J\dot q + J\ddot q}}$$ (3) $${{\pmb{M}}_x}({\pmb{q}}) = {{\pmb{J}}^{ - {\rm{T}}}}{\pmb{M}}({\pmb{q}}){{\pmb{J}}^{ - 1}}$$ (4) $${{\pmb{C}}_x}({\pmb{q, \dot q}}) = {{\pmb{J}}^{ - {\rm{T}}}}({\pmb{C}}({\pmb{q, \dot q}}) - {\pmb{M}}({\pmb{q}}){{\pmb{J}}^{ - 1}}{\pmb{\dot J}}){{\pmb{J}}^{ - 1}}$$ (5) $${{\pmb{G}}_x}({\pmb{q}}) = {{\pmb{J}}^{ - {\rm{T}}}}{\pmb{G}}({\pmb{q}})$$ (6) $${\pmb{f}} = {{\pmb{J}}^{ - {\rm{T}}}}\tau $$ (7) 通过式(2)~式(7),可以得到n-自由度的机器人遥操作系统中,主、从机器人的工作空间动力学模型为:
$${{\pmb{M}}_x}({\pmb{q}}){\pmb{\ddot x}} + {{\pmb{C}}_x}({\pmb{q}}, {\pmb{\dot q}}){\pmb{\dot x}} + {{\pmb{G}}_x}({\pmb{q}}) = {{\pmb{f}}_\tau } + {\pmb{f}}$$ (8) 式中,${\pmb{x}} \in {R^{n \times 1}}$为机器人末端执行器在工作空间的位置;${{\pmb{M}}_x}({\pmb{q}}) \in {R^{n \times n}}$为机器人工作空间的惯量矩阵;${{\pmb{C}}_x}({\pmb{q}}, {\pmb{\dot q}}) \in {R^{n \times n}}$为机器人工作空间的离心力和哥氏力项;${{\pmb{G}}_x}({\pmb{q}}) \in {R^{n \times 1}}$为机器人工作空间的重力项;${{\pmb{f}}_\tau } \in {R^{n \times 1}}$是机器人的控制力输入。
-
由于Phantom Omni和SCARA两种异构型机器人的工作空间不同,因此不能直接对系统进行控制。如表 1所示,Phantom Omni和SCARA的三维空间坐标轴的正方向不同,轴位置也不一样,工作空间范围大小也存在差异。
表 1 Phantom Omni触觉机器人和SCARA机器人的工作空间
mm 坐标轴 机器人类型 Phantom Omni SCARA X -220~+220 -200~+200 Y -94~+201 +250~+470 Z -123~+94 0~+15 在操作过程中,Phantom Omni机器人实际工作空间比SCARA机器人的实际工作空间要小。为了实现异构机器人的遥操作控制,需要解决主从机器人工作空间匹配问题,因此需要将Phantom Omni的工作空间映射到SCARA的工作空间,以便让两者不同的工作空间得到匹配。根据实际使用的最大工作空间,选择主从机器人可达到的最远点,测量出Phantom Omni机器人和SCARA机器人的机械臂在实际运动过程中所需的最大工作空间,以便进行合适的工作空间映射,避免主从机器人在操作过程中超出工作空间范围,造成机器人设备损坏和安全隐患。主机器人和从机器人的最大工作空间选取的坐标点如表 2所示。为了匹配主机和从机器人的工作空间,通过观察Phantom Omni机器人和SCARA机器人机械臂的工作空间中的坐标系特征,可以得到SCARA机器人工作空间三维坐标轴(${x_{{\rm{scara}}}}$、${y_{{\rm{scara}}}}$、${z_{{\rm{scara}}}}$)与Phantom Omni机器人工作空间三维坐标轴(${x_{{\rm{omni}}}}$、${y_{{\rm{omni}}}}$、${z_{{\rm{omni}}}}$)的关系,即:${x_{{\rm{scara}}}}$与${x_{{\rm{omni}}}}$、${y_{{\rm{scara}}}}$与${z_{{\rm{omni}}}}$、${z_{{\rm{scara}}}}$与${y_{{\rm{omni}}}}$的对应关系,具体表达式为:
表 2 主和从机器人的最大工作空间选取的坐标点
坐标点 机器人类型 Phantom Omni SCARA A (-7.1, -75.0, -76) (180.0, 265.0, 2.3) B (-0.7, -70.4, 55.5) (180.0, 451.0, 2.3) C (-143.9, -71.8, -15.4) (-183.0, 265.0, 2.3) D (140.9, -71.8, 3.9) (-183.0, 451.0, 2.3) $${x_{{\rm{scara}}}} = - {x_{{\rm{omni}}}}$$ (9) $${y_{{\rm{scara}}}} = {z_{{\rm{omni}}}} + {k_1}$$ (10) $${z_{{\rm{scara}}}} = - {k_2}(({y_{{\rm{omni}}}} - {\alpha _1}) - {\alpha _2})$$ (11) 式中,下标omni和scara分别表示主机器人和从机器人;x、y、z分别为机器人的x轴、y轴和z轴;${k_1}$、${k_2}$分别为工作空间映射比例因子;${\alpha _1}$、${\alpha _2}$是主从机器人工作区映射时的实际值。通过将Phantom Omni的工作空间映射到SCARA的工作空间中,两者不同的工作空间得到匹配,最后可以形成工作区图,如图 3所示。

图 3 主从机器人的工作空间映射
-
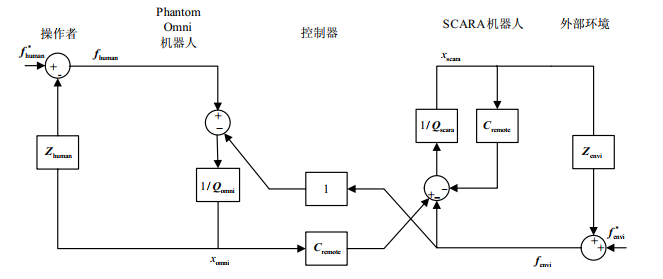
对异构型主从机器人不同的工作空间进行映射匹配后,进一步融入直接力反馈式的结构中,通过力传感器的共同作用,使得操作者可以精确地操作远端从机器人,如图 4所示。其中,阻抗${{\pmb{Q}}_{{\rm{omni}}}}$和${{\pmb{Q}}_{{\rm{scara}}}}$分别表示Phantom Omni主机器人和SCARA从机器人的动力学,阻抗${{\pmb{Z}}_{{\rm{human}}}}$和${{\pmb{Z}}_{{\rm{envi}}}}$分别表示操作者和外部环境的动力学,${{\pmb{C}}_{{\rm{remote}}}}$为SCARA从机器人的PD控制器,模块“1”代表控制增益为1的单位负反馈(即:从机器人的力反馈到主机器人增益为1),${{\pmb{f}}_{{\rm{human}}}}$表示操作者和Phantom Omni主机器人的接触力,${{\pmb{f}}_{{\rm{envi}}}}$表示SCARA从机器与环境的接触力,${\pmb{f}}_{{\rm{human}}}^*$和${\pmb{f}}_{{\rm{envi}}}^{\rm{*}}$分别表示操作者外力和环境外力。

图 4 异构型机器人遥操作的直接力反馈结构
如图 4所示,直接力反馈式的结构[12]主要在Phantom Omni主机器人端进行力控制,而在SCARA从机器人端进行位置控制。具体地,在直接力反馈结构下,操作者施加力${{\pmb{f}}_{{\rm{human}}}}$给Phantom Omni主机器人,带动主机器人运动;Phantom Omni主机器人运动时的位置${x_{{\rm{omni}}}}$进入控制器${{\pmb{C}}_{{\rm{remote}}}}$;控制器${{\pmb{C}}_{{\rm{remote}}}}$的输出传递到SCARA从机器人,使从机器人跟随主机器人运动,SCARA从机器人运动位置为${x_{{\rm{scara}}}}$与环境产生交互;环境施加给SCARA机器人的力${{\pmb{f}}_{{\rm{envi}}}}$经过单位负反馈传递回Phantom Omni机器人。直接力反馈式结构采用力传感器来测量从机器人与环境的接触力,并将该测量到的力反馈给操作者,从而实现真实力的反馈。
-
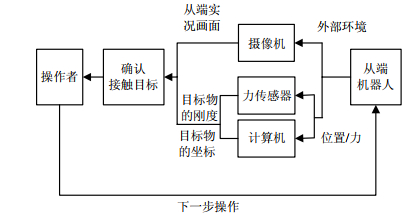
目标物定位与接触控制方法的控制机理如图 5所示,操作者通过近端的Phantom Omni力触觉主机器人控制远端的SCARA工业从机器人进行作业,此时监控画面充当了遥操作系统中的眼睛,监视SCARA的运动行为,给操作者以视觉信息反馈;同时,安装在SCARA机器人末端执行器上的力传感器,在机器人接触到目标物时,测量从机器人与目标物的接触力,并将测量到的目标物的刚度值反馈给操作者,操作者根据所得目标物的不同刚度,判断接触物的物理属性,实现真实力的反馈。测量所得接触点的三维坐标点信息通过程序返回给操作者,上述的操作赋予了操作者更强的临场感,让操作者更好地实施下一步的动作行为,直至完成更准确的作业。

图 5 目标物定位与接触控制机理
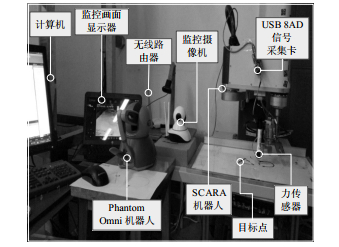
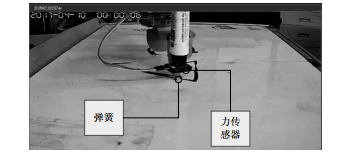
实验中搭建的异构型机器人遥操作系统实验平台如图 6所示。实验平台中主要用到了RS4350-01型SCARA机器人、Phantom Omni机器人(SenSable Technologies, MA, USA, www.sensable.com)、力传感器(FS03, Honeywell)、USB 8AD信号采集卡、监控摄像机和画面显示器、无线路由器和个人电脑等。

图 6 遥操作系统实验平台
实验过程中主从机器人的工作空间映射的参数取值如表 3所示。
表 3 主从机器人工作空间映射的参数取值
参数 数值 ${k_1}$ 350.0 ${k_2}$ 0.088 ${\alpha _1}$ 201.0 ${\alpha _2}$ 44.0 本文分别从两个方面验证系统目标物定位与接触控制方法的可行性。首先,通过实验操作过程中远端返回的目标物三维坐标数据,验证本文方法可以帮助操作者准确地获取所接触到的目标物的位置;其次,通过不同属性目标物返回的力觉刚度值验证返回的数据,可以帮助操作者准确判断远端机器人在外部环境中所接触的物体属性。图 6搭建的异构型遥操作系统实验平台采用了弹性系数不同的弹簧分别模拟物理属性不同的目标物,以研究在复杂或恶劣环境中从机器人接触不同材质属性的目标物时,系统是否具有准确的目标物定位及判断目标物材质功能。
-
实验中SCARA机器人进行目标物定点接触的操作如图 7所示。

图 7 SCARA从机器人进行目标物定点接触操作
当SCARA从机器人未接触到目标物时,程序返回结果为力觉刚度的基准值;当接触到目标物时,程序返回结果会给出目标物的三维坐标信息和测得的力觉刚度值。如表 4所示,当力觉刚度值从x1=648增加到x1=762时,接触的目标物坐标为(-37.36, 304.06, 14.98)。表中,“无”表示没有接触目标物时,无坐标数据返回。
表 4 目标物定位与接触判断的程序返回数据
x1 接触到目标物的坐标 648 无 647 无 647 无 647 无 648 无 647 无 648 无 647 无 648 无 762 (-37.36, 304.06, 14.98) 784 (-37.36, 304.06, 14.99) 749 (-37.79, 303.01, 15.01) 777 (-38.7, 303.16, 15.14) 849 (-38.82, 303.03, 15.19) 878 (-38.84, 303.01, 15.21) 981 (-38.84, 303.01, 15.21) -
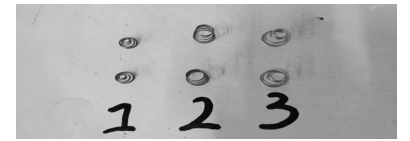
为了进一步验证远端从机器人接触到不同材质的目标物时操作者所得数据信息的差别,本文通过受力幅值的变化时间与反馈的作用力大小的区别来进行说明。实验中分别采用了如图 8所示的3种弹性系数的弹簧,并分别测试了3种弹簧受力的变化时间范围和受力的幅值范围(受力幅值:${\rm{0}}{\rm{.009}}\;{\rm{73}} \times $ ${\rm{(}}{{x} _1} - {\rm{648)}}$,单位为N)。

图 8 3种不同弹性系数的弹簧
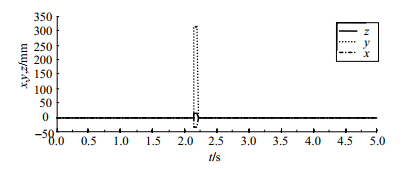
通过对目标物接触点在一定时间范围内的坐标点数据进行分析,可以清晰直观地获得目标物接触点的x、y、z轴坐标,坐标点数据曲线如图 9所示。

图 9 目标物接触点坐标曲线
从图 9可以看出,远端SCARA从机器人在时间为2.13 s的时刻开始接触目标物,接触时间为0.07 s左右。而在2.13~2.20 s时间段之前和之后,可以看出从机器人与外部环境并没有发生接触,由此操作者可通过返回的位置坐标数据和实况画面准确判断从端机器人接触到目标物,从而确保操作的安全性。
操作者通过主端的主机器人操作远端的从机器人进行目标物定点接触时,从机器人接触到的不同材质的物体所反馈给操作者的受力数据及其变化时间是不同的,对其材质进行判断的结果曲线如图 10所示。

图 10 接触目标物后对其材质进行判断的实验
从图 10可以看出,不同的材质在其受力的变化时间与反馈的受力幅值的表现上均有差异。图 10c中的2号弹簧的最大受力幅值为5 N,而图 10a、图 10e中的1、3号的最大受力幅值均为8 N,可知2号弹簧的弹性系数要小于1、3号弹簧。又从图 10b、图 10f中可以看出,3号弹簧的响应时间相对较短,受力曲线比1号弹簧更均匀,由此可判断1号弹簧弹性系数高于3号弹簧。结论如表 5所示。
表 5 3种弹簧受力幅值变化及材质判定表
弹簧型号 最大幅值/N 变化时间/s 材料属性 1 8 0.044 硬 2 5 0.013 软 3 8 0.013 中等 最后通过这些不同大小的受力数据,操作者可以准确地判断远端从机器人所接触的具体物体的属性,帮助操作者更为精确地进行遥操作作业。
-
本文提出了一种基于机器人工作空间转换与直接力反馈相结合的目标物定位与接触遥操作控制方法。该方法首先进行异构型机器人关节空间到工作空间的转换,再对两种不同机器人的工作空间进行匹配,然后采用直接力反馈式的结构,与力传感器共同作用,同时辅之以摄像机,帮助操作者对远端的外部环境和目标物进行精准的判断和操作。实验结果证明,本文方法可以有效地帮助操作者准确地获取目标物的位置坐标信息并进一步准确判断远端机器人所接触到的物体属性。此外,该方法借助力传感器进行目标物的定位和物体属性判断,较之复杂的机器人视觉标定方法而言,更加简单易于操作。本文的研究结果对于机器人辅助的矿产勘查和工业焊接等实际遥操作技术具有一定的理论指导意义。
本文的研究工作得到了西华大学研究生创新基金(ycjj2017166)的资助,在此表示感谢!
Research on Location and Contact Control of Heterogeneous Teleoperation Systems
-
摘要: 与同构型机器人遥操作系统不同,在异构型机器人遥操作系统中,操作者往往对目标物的精确定位和接触力的判断不足,当从机器人接触到外部环境时缺乏良好的临场感,导致操作精度不足。针对此类问题,该文提出了一种基于机器人工作空间转换与直接力反馈结构相结合的目标物定位与接触遥操作控制方法。该方法首先将机器人的关节空间转换到工作空间,再对异构型主从机器人不同的工作空间进行映射匹配,然后在直接力反馈式的遥操作结构下与力传感器共同作用,并辅以摄像机,使得操作者可以精确地操作远端环境中的机器人,从而准确地接触到目标物及获取目标物的位置,进一步准确判断从机器人在外部环境中所接触到的物体属性。该方法借助力反馈进行目标物定位与物体属性判断,较之复杂的机器人视觉标定方法更加简单易于操作,其有效性也在搭建的异构型机器人遥操作实验平台上得到了验证。
-
关键词:
- 直接力反馈 /
- 异构型机器人遥操作系统 /
- 物体属性判断 /
- 目标物定位与接触控制 /
- 工作空间映射
Abstract: Compared to homogeneous robotic teleoperation system, the human operator is often unable to judge the location and contact force of the target precisely in heterogeneous robotic teleoperation system. Consequently, when the slave robot contacts the external environment, the telepresence is insufficient for the operator. For this problem, this paper proposes a control method of location-contact control for heterogeneous teleoperation system. The proposed method combines the task-space conversion of the robots and the architecture of direct force feedback. First, the joint-space of the robots is converted to the task-space, and the task-space of the heterogeneous master and slave robots is mapped and matched. Then, a force sensor is incorporated to the architecture of direct force feedback and the camera plays a subsidiary role. Therefore, the operator can accurately operate the remote slave robot to contact the target and obtain the position of the target, and further determine the property of the target that the slave contacts in the external environment. By employing force feedback, this proposed method locates the target and determines its properties, and it is simple and easy to operate compared to the complicated robot vision calibration method. The effectiveness of the proposed method is verified by experiments on a developed heterogeneous teleoperation system. -
表 1 Phantom Omni触觉机器人和SCARA机器人的工作空间
mm 坐标轴 机器人类型 Phantom Omni SCARA X -220~+220 -200~+200 Y -94~+201 +250~+470 Z -123~+94 0~+15  下载: 导出CSV
下载: 导出CSV
表 2 主和从机器人的最大工作空间选取的坐标点
坐标点 机器人类型 Phantom Omni SCARA A (-7.1, -75.0, -76) (180.0, 265.0, 2.3) B (-0.7, -70.4, 55.5) (180.0, 451.0, 2.3) C (-143.9, -71.8, -15.4) (-183.0, 265.0, 2.3) D (140.9, -71.8, 3.9) (-183.0, 451.0, 2.3)
下载: 导出CSV
表 3 主从机器人工作空间映射的参数取值
参数 数值 ${k_1}$ 350.0 ${k_2}$ 0.088 ${\alpha _1}$ 201.0 ${\alpha _2}$ 44.0
下载: 导出CSV
表 4 目标物定位与接触判断的程序返回数据
x1 接触到目标物的坐标 648 无 647 无 647 无 647 无 648 无 647 无 648 无 647 无 648 无 762 (-37.36, 304.06, 14.98) 784 (-37.36, 304.06, 14.99) 749 (-37.79, 303.01, 15.01) 777 (-38.7, 303.16, 15.14) 849 (-38.82, 303.03, 15.19) 878 (-38.84, 303.01, 15.21) 981 (-38.84, 303.01, 15.21)
下载: 导出CSV
-
[1] 蒋再男. 基于虚拟现实与局部自主的空间机器人遥操作技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2010. http://cdmd.cnki.com.cn/Article/CDMD-10213-2011015967.htm JIANG Zai-nan. Research on space robot teleoperation based on virtual reality and local autonomy[D]. Harbin: Harbin Institute of Technology, 2010. http://cdmd.cnki.com.cn/Article/CDMD-10213-2011015967.htm [2] JAMES C A, BEDMARZ T P, HAUSTEIN K, et al. Tele-operation of a mobile mining robot using a panoramic display: an exploration of operators sense of presence[C]//2011 IEEE International Conference on Automation Science and Engineering. Trieste: IEEE, 2011: 279-284. http://www.researchgate.net/publication/221189449_Tele-operation_of_a_mobile_mining_robot_using_a_panoramic_display_an_exploration_of_operators_sense_of_presence [3] KUIPER R J, FRUMAU J C L, HELM F C T V D, et al. Haptic support for bi-manual control of a suspended grab for deep-sea excavation[C]//2013 IEEE International Conference on Systems, Man, and Cybernetics. Manchester: IEEE, 2013: 1822-1827. https://ieeexplore.ieee.org/document/6722067/ [4] MARTURI N, RASTEGARPANAH A, TAKAHASHI C, et al. Towards advanced robotic manipulation for nuclear decommissioning: a pilot study on tele-operation and autonomy[C]//2016 International Conference on Robotics and Automation for Humanitarian Applications (RAHA). Kollam: IEEE, 2016: 1-8. http://www.researchgate.net/publication/314876049_Towards_advanced_robotic_manipulation_for_nuclear_decommissioning_a_pilot_study_on_tele-operation_and_autonomy [5] 汤卿, 刘丝丝, 尚留记, 等.基于KUKA工业机器人的遥操作控制系统设计与异构主从控制方法研究[J].四川大学学报(工程科学版), 2016, 48(1):180-185. http://www.cnki.com.cn/Article/CJFDTOTAL-JIQI200104007.htm TANG Qin, LIU Si-si, SHANG Liu-ji, et al. Design of teleoperation system of KUKA industrial robot and the control algorithm with heterogeneous master/slave structure[J]. Journal of Sichuan University (Engineering Science Edition), 2016, 48(1):180-185. http://www.cnki.com.cn/Article/CJFDTOTAL-JIQI200104007.htm [6] 张皓钧. SCARA机器人运动学参数与视觉标定研究[D]. 哈尔滨: 哈尔滨工业大学, 2013. http://cdmd.cnki.com.cn/Article/CDMD-10213-1014080925.htm Zhang Hao-jun. The study of kinematics parameters and vision calibration of SCARA[D]. Harbin: Harbin Institute of Technology, 2013. http://cdmd.cnki.com.cn/Article/CDMD-10213-1014080925.htm [7] 赵登步. 基于机器视觉的SCARA机器人快速定位控制系统的研究与开发[D]. 无锡: 江南大学, 2015. http://cdmd.cnki.com.cn/Article/CDMD-10295-1015429959.htm Zhao Deng-bu. Research and development of rapid position control system of SCARA robot based on machine vision[D]. Wuxi: Jiangnan University, 2015. http://cdmd.cnki.com.cn/Article/CDMD-10295-1015429959.htm [8] 李嘉维, 马殿光, 唐厚君, 等. SCARA机器人焊缝跟踪器现场标定设计[J].组合机床与自动化加工技术, 2017(5):96-99. http://cdmd.cnki.com.cn/Article/CDMD-10487-1014025743.htm LI Jia-wei, MA Dian-guang, TANG Hou-jun, et al. Field calibration design of seam tracking system for SCARA robot[J]. Combined Machine Tool and Automation Processing Technology, 2017(5):96-99. http://cdmd.cnki.com.cn/Article/CDMD-10487-1014025743.htm [9] KEERIO M U, RAJPAR A H, KHAWAJA A, et al. A visual humanoid teleoperation control for approaching target object[C]//Advanced Intelligent Computing Theories and Applications with Aspects of Contemporary Intelligent Computing Techniques, International Conference on Intelligent Computing, Icic 2008. Shanghai: [s.n.], 2008: 244-251. doi: 10.1007%2F978-3-540-85930-7_33 [10] FURLER L, NAGRATH V, MALIK A S, et al. An auto-operated telepresence system for the nao humanoid robot[C]//2013 International Conference on Communication Systems and Network Technologies. Gwalior: IEEE Computer Society, 2013: 262-267. http://ieeexplore.ieee.org/document/6524399/ [11] LIU Xia, TAVAKOLI M. Adaptive inverse dynamics four-channel control of uncertain nonlinear teleoperation systems[J]. Advanced Robotics, 2011, 25(13-14):1729-1750. doi: 10.1163/016918611X584668 [12] LAWRENCE D A. Stability and transparency in bilateral teleoperation[J]. IEEE Transactions on Robotics & Automation, 1993, 3(5):1316-1321. https://ieeexplore.ieee.org/document/258054/ -

 点击查看大图
点击查看大图
图(10) / 表(5)
计量
- 文章访问数: 4102
- HTML全文浏览量: 1214
- PDF下载量: 108
- 被引次数: 0
