 ISSN
ISSN 






-
单电机重度混合动力汽车在低速时以纯电动驱动、发动机熄火,然后在大负荷工况时发动机起动并介入驱动,系统切换至混合驱动模式,可减少发动机在低速和低负荷非经济区域工作,提高整车的燃油经济性。然而,由于系统中只有一个电机,上述切换过程须要通过接合离合器来起动发动机,并将发动机动力传递给传动系,容易导致系统的输出转矩突变,产生纵向冲击,严重影响车辆的纵向驾驶性能。
针对单电机混合动力系统纯电动模式至混合驱动模式切换问题,文献[1-3]提出了基于离合器恒压控制与电机转矩补偿的协调控制策略。文献[4]设计了基于离合器油压PID控制与电机转矩补偿的协调控制策略。文献[5-6]采用了离合器油压模糊控制与电机转矩补偿相结合的协调控制策略。文献[7]将鲁棒控制应用于单电机混合动力系统模式切换,分别设计了发动机调速控制器和电机转矩补偿控制器。在上述模式切换协调控制策略中,发动机点火后与电机转速同步阶段,离合器一直处于滑摩状态,其控制的难度较大。同时,离合器滑磨功也会增加,尤其在城市工况下,混合动力系统频繁地进行此类模式切换会进一步加剧离合器磨损。
因此,本文以某单电机重度混合动力系统为研究对象,建立系统模式切换过程的动力学模型,将系统模式切换过程划分为四4个阶段,基于前馈-反馈控制方法,分阶段设计动力源与离合器的协调控制策略,以减小系统模式切换过程的纵向冲击,降低离合器磨损。最后通过仿真对比和台架试验对协调控制策略有效性进行验证。
-
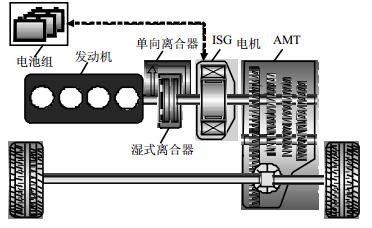
本文研究的单电机重度混合动力系统结构如图 1所示。系统主要由发动机、单向离合器、湿式多片离合器、ISG电机和机械式自动变速器组成。电机与发动机采用同轴并联结构形式,电机置于变速器输入端,电机与发动机之间布置有单向离合器和湿式多片离合器,单向离合器使发动机转速低于电机转速时处于断开状态,两轴之间可相对转动,而在发动机转速趋于超过电机转速时单向离合器处于闭合状态将两轴锁在一起,避免湿式离合器的过度滑摩。当湿式离合器分离时,系统可以纯电动驱动或进行制动能量回收;湿式离合器接合时,带动发动机启动并介入驱动,系统可以发动机驱动、混合驱动、行车发电模式运行。

图 1 单电机重度混合动力系统
该系统可实现混合动力汽车各种工作模式。与双电机重度混合动力系统相比,其结构简单,便于整车布置,成本低廉,适合商业化推广。
-
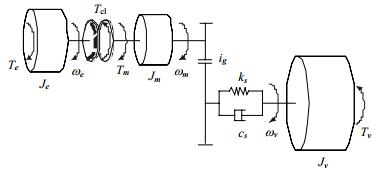
采用集中质量参数法,建立单电机重度混合动力汽车纯电动驱动至混合驱动切换过程简化的系统模型,如图 2所示。图中,Je为发动机等效转动惯量(包括曲轴、飞轮和湿式离合器从动盘);,Jm为电机等效转动惯量(包括电机转子和湿式离合器主动盘),;Jv为整车等效转动惯量,;ωe, ω、ωm, ω、ωv分别为发动机、电机和车轮的转速;,ig为变速器速比;,Te为发动机转矩;,Tcl为离合器转矩;,Tm为电机转矩;,Tv为整车行驶阻力矩。

图 2 单电机重度混合动系统模型
当离合器处于滑摩状态时,根据上述模型可推导出系统的动力学方程为:
$$\left\{ \begin{gathered} {J_e}{{\dot \omega }_e} = {T_{{\rm{cl}}}} + {T_e} \hfill \\ {J_m}{{\dot \omega }_m} = {T_m} - {T_{{\rm{cl}}}} - \frac{{{k_s}}}{{{i_g}}}({{{\theta _m}} \mathord{\left/ {\vphantom {{{\theta _m}} {{i_g}}}} \right. } {{i_g}}} - {\theta _v}) - \frac{{{c_s}}}{{{i_g}}}({{{\omega _m}} \mathord{\left/ {\vphantom {{{\omega _m}} {{i_g}}}} \right. } {{i_g}}} - {\omega _v}) \hfill \\ {J_v}{{\dot \omega }_v} = {k_s}({{{\theta _m}} \mathord{\left/ {\vphantom {{{\theta _m}} {{i_g}}}} \right. } {{i_g}}} - {\theta _v}) + {c_s}({{{\omega _m}} \mathord{\left/ {\vphantom {{{\omega _m}} {{i_g}}}} \right. } {{i_g}}} - {\omega _v}) - {T_v} \hfill \\ \end{gathered} \right.$$ (1) 上式中,需要注意的是发动转矩Te,在发动机点火前,Te为发动机起动阻力矩,取负值;在发动机点火后,Te为发动机输出转矩,取正值。
当离合器完全接合后,系统进入混合驱动模式,其动力学方程可表示为:
$$\left\{ \begin{gathered} ({J_m} + {J_e}){{\dot \omega }_m} = {T_e} + {T_m} - \frac{1}{{{i_g}}}{k_s}({{{\theta _m}} \mathord{\left/ {\vphantom {{{\theta _m}} {{i_g}}}} \right. } {{i_g}}} - {\theta _v}) \hfill \\ {\kern 1pt} - \frac{1}{{{i_g}}}{c_s}({{{\omega _m}} \mathord{\left/ {\vphantom {{{\omega _m}} {{i_g}}}} \right. } {{i_g}}} - {\omega _v}) \hfill \\ {J_v}{{\dot \omega }_v} = {k_s}({{{\theta _m}} \mathord{\left/ {\vphantom {{{\theta _m}} {{i_g}}}} \right. } {{i_g}}} - {\theta _v}) + {c_s}({{{\theta _m}} \mathord{\left/ {\vphantom {{{\theta _m}} {{i_g}}}} \right. } {{i_g}}} - {\omega _v}) - {T_v} \hfill \\ \end{gathered} \right.$$ (2) -
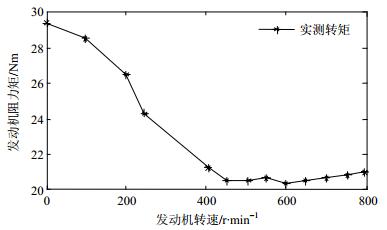
由于模式切换过程须要起动发动机,通过发动机反拖试验[8]获得的发动机热起动下的阻力矩特性曲线如图 3所示。

图 3 发动机起动阻力矩
从图 3中可知,发动机静起动阻力矩约为30 Nm,随着转速的增加,起动阻力矩减小,当转速大于450 r/min以后,起动阻力矩保持不变,约为21 Nm。
-
在起动发动机阶段以及发动机和电机转速同步过程中,须通过湿式离合器滑动摩擦来传递转矩,离合器在滑摩阶段的转矩计算公式为[9]:
$${T_{{\rm{cl}}}} = \mu ({P_{cl}} - {P_0})A{R_{cl}}Z \cdot {\rm{sgn}}({\omega _m} - {\omega _e})$$ (3) 式中,μ为摩擦片的摩擦系数;Z为离合器的摩擦面数;A为活塞作用面积;Pcl为油缸压力;P0为回位弹簧压力;Rcl为摩擦片等效半径;sgn为符号函数。
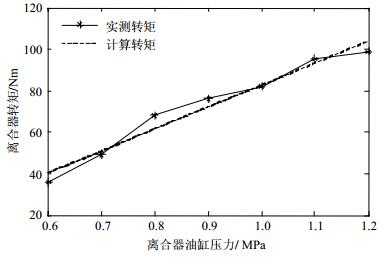
由式(3)可知,当湿式离合器结构参数确定后,摩擦转矩主要取决于离合器油缸压力Pcl和摩擦片的摩擦系数μ。离合器油缸压力大小通过液压执行机构来进行控制,摩擦系数在动态条件下则是与离合器摩擦面温度、相对角速度和离合器压力等因素有关,具有非线性特性。为此,本文通过湿式离合器压力-转矩特性试验,得到离合器压力与转矩变化关系曲线,如图 4所示。

图 4 离合器压力-转矩特性
从图中可以看出,随着离合器接合油压的增加,离合器传递的转矩也在增大。由于摩擦系数在离合器接合过程中存在变化,转矩和压力并不呈现线性关系,与计算的压力-转矩曲线存在一定的偏差,但偏差较小。因此,可将离合器压力和转矩近似为线性关系。只要合理控制液压缸的油压,就可对摩擦转矩进行控制。
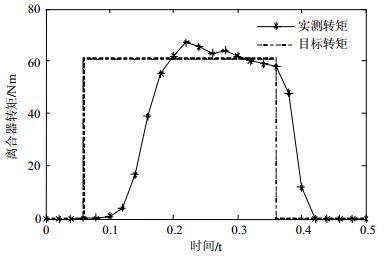
图 5为油缸压力从0 Mpa阶跃变化到0.76 MPa,并保持一定时间后再降至0 Mpa时,湿式离合器转矩响应特性曲线。从图中可知,当离合器目标转矩发生改变后,离合器实际转矩响应以指数规律趋向于改变后的目标值,并且离合器分离响应明显快于接合响应。因此,可将离合器转矩响应近似为一阶惯性系统,其接合响应的时间常数T约为0.06 s,分离响应的时间常数T约为0.025 s。

图 5 离合器转矩响应特性
离合器接合过程的磨损可通过的滑磨功来进行衡量,滑摩功可表示为:
$${W_{cl}} = \int_0^{{\rm{ }}{t_{{\rm{cl}}}}} {{T_{{\rm{cl}}}}\left| {{\omega _e} - {\omega _m}} \right|} {\rm{d}}t$$ (4) 式中,Wcl为离合器滑摩功;tcl为滑摩时间。
-
根据纯电动至混合驱动模式切换过程中发动机和离合器元件的不同状态,将整个切换过程划分为发动机起动、发动机转速同步、离合器接合和混合驱动4四个阶段,针对每个阶段分别设计动力源与离合器的协调控制策略。
-
由于发动机没有配置起动电机,发动机起动须要通过湿式离合器接合产生的摩擦转矩来实现,离合器摩擦转矩会对传动系统产生拖拽效应,降低驾驶性能。
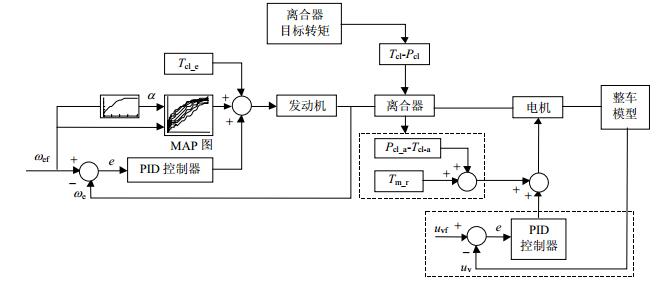
为此,基于前馈-反馈的控制方法,设计如图 6所示的协调控制策略。假设发动机起动过程近似为匀加速运动,起动时间为0.4 s[8]。从而,离合器接合转矩等于发动机启动阻力矩与惯性力矩之和,即${T_e}{\rm{ + }}{J_e}{\dot \omega _e} = {T_{{\rm{clr}}}}$。根据式(3)可求得离合器接合压力。离合器压力采用开环控制,通过电机进行前馈控制来补偿离合器转矩对传动系统的干扰。电机目标转矩为:

图 6 发动机起动阶段的前馈-反馈控制
$${T_{{\rm{mf}}}} = {T_{{\rm{cl}}}}_{\rm{e}}{\rm{ + }}{T_{{\rm{mr}}}}$$ (5) 式中,Tmf为电机目标转矩;Tcle为离合器转矩估计值;Tmr为电机驱动车辆所需转矩。
同时,由于离合器转矩估计存在误差,设计PID控制器进行反馈控制,减小车速波动。
-
当发动机转速达到800 r/min以后,发动机点火启动。此时,为了减小发动机点火对传动系统的冲击以及减小离合器滑磨功,在发动机点火之前控制湿式离合器迅速分离。在发动机点火启动后,需要对发动机转速进行控制[10],使之与变速器输入轴转速快速同步,发动机目标转速即是变速器输入轴转速。本文采用开环与闭环复合控制方法来对发动机转速进行控制,其控制原理如图 7所示。

图 7 发动机转速前馈-反馈控制
图中,开环控制将发动机空载时目标转速所对应的节气门开度$\alpha $(如图 8所示[11])与目标转速作为变量,通过发动机MAP图查表获得发动机开环转矩;同时,采用PID反馈控制产生修正转矩,两者求和得到发动机实际的转矩输入。此阶段由于离合器分离,电机不再对离合器转矩进行补偿,电机只采用反馈控制,稳定车速。

图 8 发动机空载特性曲线
-
当发动机与变速器输入轴转速差小100 r/min时,离合器再次接合,进入滑摩状态,离合器目标转矩为离合器接合完成瞬间所传递的转矩,此时发动机与电机角加速度相等,即${\dot \omega _e} = {\dot \omega _m}$。根据公式(1),并忽略传动系统刚度和阻尼的影响,可得离合器目标转矩为:
$${T_{{\rm{clr}}}}{\rm{ = }}\frac{{{T_{\rm{e}}}({J_{\rm{m}}}{\rm{ + }}{{{J_{\rm{v}}}} \mathord{\left/ {\vphantom {{{J_{\rm{v}}}} {i_{\rm{g}}^{\rm{2}}}}} \right. } {i_{\rm{g}}^{\rm{2}}}}) - ({T_{\rm{m}}} - {{{T_{\rm{v}}}} \mathord{\left/ {\vphantom {{{T_{\rm{v}}}} {{i_{\rm{g}}}}}} \right. } {{i_{\rm{g}}}}}){J_{\rm{e}}}}}{{{J_{\rm{e}}}{\rm{ + }}({J_{\rm{m}}}{\rm{ + }}{{{J_{\rm{v}}}} \mathord{\left/ {\vphantom {{{J_{\rm{v}}}} {i_{\rm{g}}^{\rm{2}}}}} \right. } {i_{\rm{g}}^{\rm{2}}}})}}$$ (6) 采用基于前馈-反馈的控制方法,设计此阶段的协调控制策略,如图 9所示。,图 9中,离合器接合压力采用开环控制,发动机仍进行转速控制,但发动机转速会受到离合器转矩的干扰。因此,在发动机控制中增加前馈控制以补偿离合器转矩干扰。同时,电机也通过前馈控制补偿离合器转矩干扰,并采用PID控制器进行反馈控制,以稳定车速。

图 9 离合器接合阶段前馈-反馈控制
-
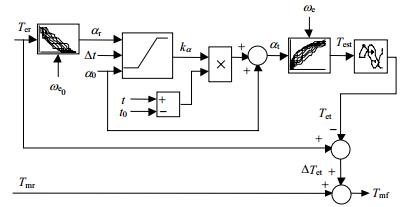
当发动机与电机转速同步之后,离合器完全锁止,车辆由发动机和电机并联混合驱动,发动机和电机将分别从当前转矩向能量管理策略预先制定的目标转矩过渡。在此过程中,由于发动机动态转矩难于精确估计,而电机转矩响应快,控制精度高。因此,为了保证该阶段系统输出转矩的平稳性,采用前馈-反馈控制的方法,设计了““发动机动态转矩近似估计+电机转矩补偿””的协调控制策略。其控制原理如图 10所示。,图 10中,发动机转矩向目标转矩过渡时,为了便于对发动机动态转矩的估计,对电子节气门开度变化率ka进行限制,其计算公式为:

图 10 发动机动态转矩近似估计+电机转矩补偿控制原理
$${k_\alpha }{\rm{ = }}\frac{{{\alpha _r} - {\alpha _0}}}{{\Delta t}}$$ (7) 式中,${\alpha _r}$位发动机目标转矩所对应的节气门开度;${\alpha _0}$为离合器完全接合时刻的发动机节气门开度;$\Delta t$为设定的发动机转矩过渡时间。
从而,在发动机转矩过渡过程中任意时刻t,节气门开度可表示为:
$${\alpha _t} = {\alpha _o} + {k_\alpha }(t - {t_0})$$ (8) 式中,${\alpha _t}$为t时刻的节气门开度;t0为离合器完全接合时刻。
由t时刻的发动机转速和节气门开度,通过发动机MAP图查表获得发动机稳态转矩Test。发动机动态转矩Tet可近似于将发动机稳态转矩Test在时间上进行一定的延迟输出进行估计[12]。同时,在过渡过程中,发动机目标转矩Ter与动态转矩估计值Tet的差值$\Delta {T_{{\rm{et}}}}$可通过电机进行实时补偿,电机的目标转矩为:${T_{{\rm{mf}}}} = \Delta {T_{{\rm{et}}}}{\rm{ + }}{T_{{\rm{mr}}}}$。
由于发动机动态转矩估计难免存在误差,电机同时也采用PID控制器进行反馈控制,以减小误差对车速的影响。其原理与前述一样,这里不再赘述。
-
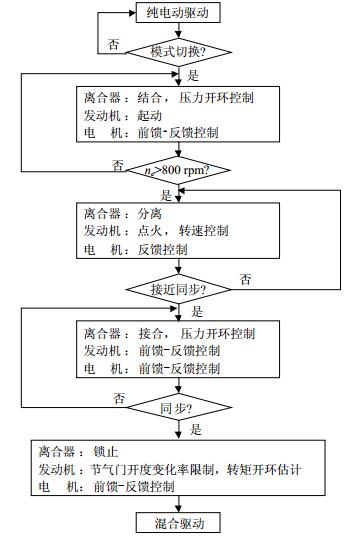
根据以上分析,归纳出单电机重度混合动力系统模式切换控制流程,如图 11所示。

图 11 纯电动至混合驱动模式切换控制流程
-
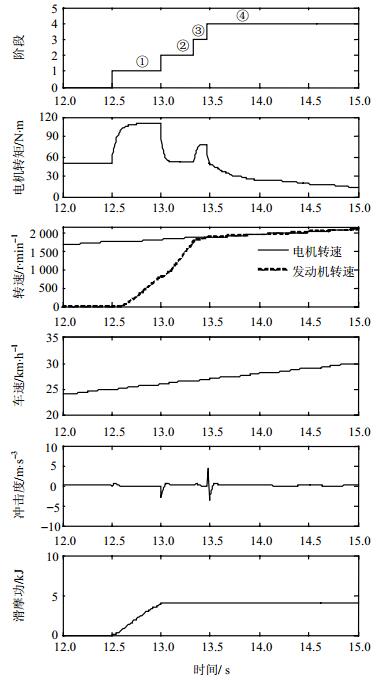
为了验证所提出的协调控制策略的有效性,利用Matlab/Simulink/Stateflow仿真平台,建立了单电机重度混合动力系统模式切换纵向动力学仿真模型以及协调控制策略模型。对纯电动至混合驱动模式切换过程进行仿真分析,仿真模型的整车主要参数如表 1所示,仿真结果如图 12所示。
表 1 整车主要参数
名称 数值 单位 整车质量(m) 1560 kg 风阻系数(CD) 0.32 迎风面积(A) 2.28 m2 滚动阻尼系数(f) 0.013 5 变速器速比(ig) 3.67/2.05/1.31/0.96/0.78 主减速器速比(io) 3.93 车轮半径(r) 0.298 m 
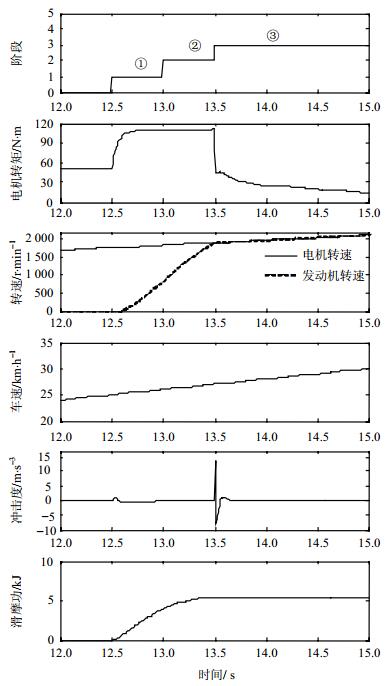
图 12 分阶段的动力源与离合器协调控制策略下的纯电动至混合驱动仿真结果
从图 12中可知,整个模式切换先后经历了发动机起动①、转速同步②、离合器接合③和混合驱动④4四个阶段。在12.5 s时刻整车控制器发出模式切换指令,离合器开始接合,12.61 s时刻离合器转矩大于发动机起动阻力矩,开始起动。0.4 s后发动机转速升至800 r/min,离合器迅速分离,发动机点火。发动机点火后转速迅速上升,在13.33 s时与电机转速
接近同步。离合器再次接合,进入滑摩阶段,0.15 s后离合器完全接合。在混合动力驱动阶段,发动机和电机分别进行转矩调节,在14.46 s时发动机和电机转矩分别达到目标值,模式切换结束。整个模式切换过程耗时1.96 s,冲击度最大值为4.34 m/s3,离合器滑磨功为4.07 kJ。
而在相同条件下,采用参考文献[3]中提出的离合器恒压控制和电机转矩补偿的协调控制策略仿真结果如图 13所示。从图 13中可知,整个模式切换包括发动机起动①、离合器滑摩同步②和混合驱动③三3个阶段,耗时2.1 s,但冲击度最大值为13.8 m/s3,滑磨功为5.35 kJ。

图 13 基于离合器恒压与电机转矩补偿协调控制策略的纯电动至混合驱动仿真结果
通过仿真对比可知,在相同条件下,采用本文设计的协调控制策略,纯电动至混合驱动模式切换过程中系统的冲击度最大值小于德国的冲击度限制推荐值10 m/s3 [13]。而采用离合器恒压和电机转矩补偿协调控制策略的冲击最大值大于10 m/s3。,同时,滑磨功也比后者降低了24%。因此,本文所设计的协调控制策略能有效降低混合动力系统模式切换过程纵向冲击,减小离合器滑摩功。
-
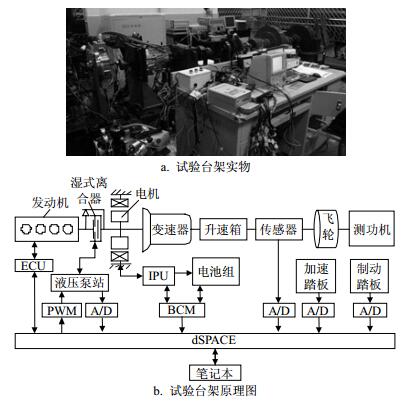
进一步通过台架试验来验证所设计的协调控制策略的有效性。搭建的单电机重度混合动力系统台架系统实物如图 14(a)所示。,台架试验系统的工作原理如图 14(b)所示。台架试验系统由发动机、湿式离合器、电机、动力电池组、变速器、升速箱、惯性飞轮和电涡流测功机等组成。液压泵站为湿式离合器接合提供油压,转速转矩传感器用于测量系统输出轴转速和转矩,采用dSPACE/MicroAutoBox作为整车控制器(HCU)对混合动力系统进行控制和数据采集,发动机控制器(ECU)、电机控制器(IPU)和电池管理系统(BCM)通过CAN总线与HCU进行通信。dSPACE输出PWM信号控制高速开关阀,对液压系统油压进行调节。

图 14 单电机重度混合动力系统试验台架
通过笔记本电脑将本文所设计的协调控制策略模型下载到dSPACE中进行台架试验,试验测试结果如图 15所示。由图可知,当车速在25 km时开始进行模式切换,离合器开始接合,同时电机进行转矩补偿,最大补偿转矩约60 N·m,发动机在0.41 s后达到点火转速。,此时离合器迅速分离,发动点火启动。发动机启动后转速上升,与电机转速接近同步时,离合器再次接合,电机同时进行转矩补偿。当离合器完全接合后,由于对发动机和电机转矩进行了调节,输出转矩平稳过渡。在整个模式过程中,车速平稳上升,冲击度最大值为4.97 m/s3,小于德国的冲击度限制推荐值10 m/s3,滑磨功约为4.33 kJ,与仿真计算的结果基本一致,满足使用要求。

图 15 台架试验测试结果
-
1) 针对单电机重度混合动力系统模式切换协调控制问题,建立了系统模式切换过程的动力学模型。根据动力源和离合器元件不同状态,将系统模式切换过程划分为4四个阶段,采用基于前馈-反馈控制方法,提出了分阶段的动力源与离合器协调控制策略。
2) 仿真结果对比表明,与离合器恒压和电机转矩补偿协调控制策略相比,本文提出的协调控制策略能使单电机重度混合动力系统模式切换过程的冲击最大值小于德国推荐标准10 m/s3。同时,滑摩功也比前者降低了24%。
3) 台架试验结果表明,采用本文提出的协调控制策略,单电机重度混合动力系统模式切换过程冲击度和滑摩功均能满足使用要求,验证了协调控制策略的有效性。
Coordination Control Strategy of Mode Transition for a Full Hybrid Electric Drivetrain with Single Motor
-
摘要: 针对单电机重度混合动力系统纯电动驱动至混合驱动模式切换过程中出现纵向驾驶性能降低的问题,提出了一种分阶段的动力源与离合器协调控制策略。建立了面向控制的模式切换过程系统动力学模型,根据发动机和离合器的不同状态,将模式切换过程划分为4个阶段,基于前馈-反馈控制方法设计了分阶段的协调控制策略,用于调节动力源和离合器的转速转矩。仿真对比以及台架试验结果表明,所提出的协调控制策略能有效提高单电机重度混合动力系统的纵向驾驶性能,并能减小离合器磨损。Abstract: The longitudinal drivability is degraded seriously when the full hybrid electric drivetrain with single motor switches from the pure electric drive mode to the hybrid drive mode. To address this problem, a phased coordination control strategy of power source and clutch is proposed in this paper. Firstly, a control-oriented dynamic model is established. And then, according to the operating status of engine and clutch, the whole mode transition process is divided into four stages. Based on the feed forward and feedback control method, the pashed coordination control strategy is designed to adjust the speed or torque of power source and clutch in each phase. Finally, the effectiveness of the control strategy is verified by simulation comparison and bench test. The proposed coordinated control strategy can effectively improve the longitudinal drivability of the full hybrid electric drivetrain with single motor during mode transition, and also can reduce the wear of the clutch.
-
表 1 整车主要参数
名称 数值 单位 整车质量(m) 1560 kg 风阻系数(CD) 0.32 迎风面积(A) 2.28 m2 滚动阻尼系数(f) 0.013 5 变速器速比(ig) 3.67/2.05/1.31/0.96/0.78 主减速器速比(io) 3.93 车轮半径(r) 0.298 m  下载: 导出CSV
下载: 导出CSV
-
[1] HE Y S, NORMAN K B, ANTHONY L S, et al. Modeling and drivability assessment of a single-motor strong hybrid at engine start[C]//International Powertrains, Fuels & Lubricants Meeting. Detroit, USA: SAE, 2010. [2] ANTHONY L S, NORMAN K B, HONG Y, et al. Controls development for clutch-assisted engine starts in a parallel hybrid electric vehicle[C]//world Congress & Exhibition. Detroit, USA: SAE, 2011. [3] 刘永刚, 秦大同, 刘振军, 等.单电机重度混合动力系统行进间发动机起动控制策略研究[J].汽车工程, 2015, 1(37):49-54. http://d.old.wanfangdata.com.cn/Periodical/qcgc201501009 LIU Yong-gang, QIN Da-tong, LIU Zhen-jun, et al. A research on the control strategy for engine starting while driving in a full hybrid power system with single motor[J]. Automotive Engineering, 2015, 1(37):49-54. http://d.old.wanfangdata.com.cn/Periodical/qcgc201501009 [4] 戴一凡, 罗禹贡, 边明远, 等.单电机强混合动力电动车的动态协调控制[J].汽车工程, 2011, 23(12):1007-1012. http://d.wanfangdata.com.cn/Periodical/qcgc201112001 DAI Yi-fan, LUO Yu-gong, Bian Ming-yuan, et al. Dynamic coordinated control for a full hybrid electric vehicle with single motor[J]. Automotive Engineering, 2011, 23(12):1007-1012. http://d.wanfangdata.com.cn/Periodical/qcgc201112001 [5] 杨阳, 李小强, 苏岭, 等.重度混合动力汽车工作模式切换控制策略[J].中国公路学报, 2014, 6(27):109-119. http://d.old.wanfangdata.com.cn/Periodical/zgglxb201406014 YANG Yang, LI Xiao-qiang, SU Ling, et al. Control strategy for mode-switch of full hybrid electric vehicle[J]. China Journal of Highway and Transport, 2014, 6(27):109-119. http://d.old.wanfangdata.com.cn/Periodical/zgglxb201406014 [6] 杨阳, 黄剑峰, 秦大同, 等.双离合器式混合动力汽车模式切换控制策略[J].汽车工程, 2013, 8(35):723-730. http://d.old.wanfangdata.com.cn/Periodical/qcgc201308012 YANG Yang, HUANG Jian-feng, QIN Da-tong, et al. Control strategy for operation mode switch of dual-clutch hybrid electric vehicle[J]. Automotive Engineering, 2013, 8(35):723-730. http://d.old.wanfangdata.com.cn/Periodical/qcgc201308012 [7] ZHANG Hu, WANF Cun-lei, ZHANG Yong, et al. Drivability improvements for a single-motor parallel hybrid electric vehicle using robust controls[J]. Journal of Zhejiang University-Science A (Applied Physics & Engineering), 2014, 15(4):291-301. http://d.old.wanfangdata.com.cn/Periodical/zjdxxb-e201404006 [8] 李红朋.基于HEV发动机起动性能的ISG转矩控制与仿真研究[D].重庆: 重庆大学, 2005. http://www.wanfangdata.com.cn/details/detail.do?_type=degree&id=D021562 LI Hong-peng. ISG torque control and simulation study based on engine startup performance for mild hybrid electric vehicle[D]. Chongqing: Chongqing University, 2005. http://www.wanfangdata.com.cn/details/detail.do?_type=degree&id=D021562 [9] DEUR J, PETRIC J, ASGARI J, et al. Modeling of wet clutch engagement including a through experimental validation[C]//SAE World Congress. Detroit, USA: SAE, 2005. [10] 冯启山, 殷承良, 张云侠, 等.混合动力汽车发动机调速系统研究[J].内燃机学报, 2005, 23(2):162-167. doi: 10.3321/j.issn:1000-0909.2005.02.010 FENG Qi-shan, YIN Cheng-liang, ZHANG Yun-xia, et al. Research on speed governing system for hybrid electric vehicle engine[J]. Transactions of CSICE, 2005, 23(2):162-167. doi: 10.3321/j.issn:1000-0909.2005.02.010 [11] 叶明, 秦大同, 刘振军.轻度混合动力AMT系统换挡品质控制[J].机械工程学报, 2009, 45(5):108-114. http://d.old.wanfangdata.com.cn/Periodical/jxgcxb200905016 YE Ming, QIN Da-tong, LIU Zhen-jun. Shift performance control for mild hybrid electric vehicle equipped with automatic manual transmission[J]. Journal of Mechanical Engineering, 2009, 45(5):108-114. http://d.old.wanfangdata.com.cn/Periodical/jxgcxb200905016 [12] 侯献军, 杜常清, 颜伏伍, 等.混合动力系统状态切换技术研究[J].内燃机工程, 2009, 30(16):72-76. http://d.old.wanfangdata.com.cn/Periodical/nrjgc200906015 HOU Xian-jun, DU Chang-qing, YAN Fu-wu, et al. Study on mode switching technique of hybrid powertrain system[J]. Chinese Internal Combustion Engine Engineering, 2009, 30(16):72-76. http://d.old.wanfangdata.com.cn/Periodical/nrjgc200906015 [13] ZHANG Jun-zhi, LU Xin, WANG Li-fang, et al. A study on the drivability of hybrid electric vehicle[C]//SAE International Powertrains, Fules and Hbricants Congress. Shanghai: SAE, 2008. -

 点击查看大图
点击查看大图
图(15) / 表(1)
计量
- 文章访问数: 4292
- HTML全文浏览量: 1227
- PDF下载量: 77
- 被引次数: 0
