 ISSN
ISSN 


 下载:
下载:




-
基于位置的服务(location-based sevices, LBS)与人们的生活联系的越来越密切,它可以根据用户的位置信息提供室内导航、医疗救助、商业推广、信息推送和娱乐游戏等服务。因此,如何在大型室内环境中快速和准确的获取目标的位置信息已成为近年来研究的一个热点[1-2],很多的室内定位技术应运而生[3-8]。室内定位技术按照是否添加额外设备可分为两类:1)基于RSS的定位技术,如蓝牙、WiFi[9];2)基于到达时间、到达时间差、到达角度和飞行时间的定位技术,如红外线、超声波和无线射频识别[3-7]。随着移动互联网的发展,基于RSS的指纹定位技术已成为近年来研究的一个热点[2]。指纹定位技术在其在线定位阶段,由于信号的波动使得指纹定位方法的精度还有待提高[3, 8-9]。
文献[6]建立了基于RSS梯度的指纹库。此外,为了实时定位及跟踪目标,研究人员探索了融合WiFi指纹和行人航迹推测(pedestrian dead reckoning, PDR)辅助定位的算法。文献[10]分析了定位精度与部署的网络接入点(access point, AP)数目有关。因此,为了实现最大信号覆盖和提高网络吞吐量[11-12],文献[13-14]提出了一种部署AP的方法,以便每个位置都可以接收到所需最少AP数量的WiFi信号。然而,这种定位方式会使离线阶段的采样工作量增加。为了减少采样量,文献[15-17]建立了无线信号在目标环境中基于对数路径的损耗模型。文献[18]提出用基于压缩感知的方法来恢复缺失的指纹,但由于室内信号传递的复杂性,这种方法并不能完全反映真实的室内环境。文献[19]把来自不同设备的RSS进行简单线性变换以补偿环境的变化。为了提高离线指纹数据库的质量,文献[20]提出在接收RSS时应考虑接收设备的角度和方向。文献[21]提出对离线指纹库添加更多的辅助特征。文献[22-23]引入卡尔曼滤波器(kalman filter, KF)和粒子滤波器(particle filter, PF)来减小定位时的累积误差。然而,大多数研究在实际应用中很难在定位成本和定位精度上达到平衡。虽然一些研究能获得2 m以内的精度[3, 6, 8-9],但在线阶段所花费的时间较多,或离线阶段采样所需的时间和人力成本较多。为了减少离线阶段的采样时间,提高在线阶段的定位精度,本文在传统的室内指纹定位算法基础上,提出P-FP算法来建立离线指纹库,并提出PS-FP算法来优化定位坐标。
本文研究的指纹定位方法可以用于在室内停车场中寻车。整个寻车过程分为:1)停车阶段,在空闲停车位停完车之后,采用PS-FP算法得到当前停车位的位置坐标并保存;2)寻车阶段,采用PS-FP算法实时得到移动目标的位置并寻找之前保存的位置坐标。
-
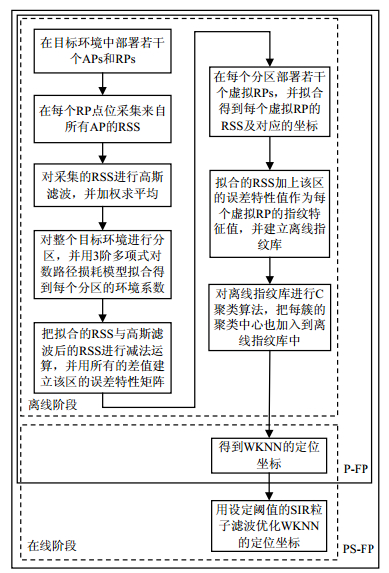
P-FP和PS-FP算法的流程图如图 1所示。

图 1 P-FP和PS-FP算法流程图
-
WiFi信号在室内环境中传播会受到多径传播效应的影响,即无线信号会通过反射、绕射、折射和衍射等多种途径到达接收端。离线阶段,采集设备在每个RP处所接收到的来自同一个AP的RSS样本是时刻变化的,这是由于接收到的RSS是多个传播路径的信号值的矢量和,把环境变化对RSS的影响视为噪声的干扰,且该噪声可以看作服从正态分布[25-27]。因此,为了减小噪声的干扰,采用高斯滤波对采集的RSS进行滤波。
设在t时刻,第m个RP(RPm)收到来自第n个AP(APn)的信号RSS为rmn(t),其均值μmn和标准差σmn为:
$$ {\mu _{{{mn}}}} = \frac{1}{T}\sum\limits_{{{t}} = 1}^T {{r_{mn}}(t)} $$ (1) $$ {\sigma _{{{mn}}}} = \sqrt {\frac{1}{{T - 1}}\sum\limits_{t = 1}^T {{{[{r_{mn}}(t) - {\mu _{{{mn}}}}]}^2}} } $$ (2) 式中,T为采样点的个数。
-
文献[15-16]研究了室内环境下的信道传输特性,并通过多种检验方法进行了拟合优度检验,结果表明三阶多项式对数距离路径损耗模型更能反映室内环境的RSS衰减特性。所以,本文采用三阶多项式对数距离路径损耗模型作为拟合模型:
$$ \left\{ {\begin{array}{*{20}{l}} {l^i} = {(10\log {d_{mn}})^i} \;\;\; i = 1,2,3 \\ {r_{mn}}(t) = {a_i}{l^i} + {a_{i - 1}}{l^{i - 1}} + , \cdots , + {a_0}{l^0} + rs{s_\sigma } \\ \end{array}} \right. $$ (3) 式中,dmn为RPm与APn之间的实际距离;ai为衰减因子;a0为距离发射节点为1 m处的路径损耗值;rssσ为服从N(0, σmn)的噪声分布。本文把(ai, ai-1, …, a0)定义为一组环境系数。
在停车场的某些区域,即使在dmn相等的情况下,在同一RP处所接收到的来自不同AP的RSS相差也很大。因此,为了得到更能反映整个实际场景的环境系数,本文采用分区拟合的方法求解多组环境系数。首先对停车场进行分区,每个分区的中心就是部署的RP,然后为了得到每个分区的环境系数,建立分区拟合模型:
$$ {r'_{mn}} = ({a_{mi}},{a_{m(i - 1)}}, \cdots ,{a_{m0}}){({l^i},{l^{i - 1}}, \cdots ,1)^{\rm{T}}} $$ (4) 式中,${r'_{mn}}$为在第m个RP处接收到的来自第n个AP的加权平均值。第m个分区的环境系数是(ami, am(i-1), …, am0),通过M次拟合就能得到整个停车场的环境系数。
离线指纹库建立的质量与指纹定位算法的定位精度是密切相关的。本文虽然用多组环境系数建立离线指纹库,但通过实验发现,定位误差仍然很大。为了减小定位误差,一般的方法是增加RP的密度,但随着RP的增多,离线阶段所需要的采样工作量和在线阶段的计算量都明显增加。通过测试发现,对于同一个AP发出的信号,在同一分区内所接收到的RSS都具有相似的环境特性。基于以上分析,在每个分区建立误差特性向量,并用误差特性向量代替该分区的噪声的方法来提高离线指纹库的质量。本文把所有分区的误差特性向量组成的矩阵定义为误差特性矩阵,误差特性值为:
$$ {\rm{er}}{{\rm{r}}_{mn}} = {r'_{mn}} - {r''_{mn}} $$ (5) 式中,${r''_{mn}}$为利用第m个分区的环境系数和式(4)逆推得到的来自APn的RSS。
为了提高离线指纹库的定位精度,本文首先在全部分区部署虚拟RP,即建立1 m×1 m的网状结构,并把每个网格的中心作为虚拟RP。仅在已部署RP的基础上部署虚拟RP,并没有增加额外的离线采样量。设第m个分区中的第g个虚拟RP为${\rm{R}}{{\rm{P}}_{{m_g}}}$,该分区中虚拟RP的总数为G。用拟合值加上所在分区的误差特性值作为离线指纹库的指纹特征值,并建立离线指纹库:
$$ \left\{ {\begin{array}{*{20}{l}} {{p^i} = {{(10\log {d_{{m_g}n}})}^i}\;\;\;i = 1,2,3,g = 1,2, \cdots ,G}\\ {{s_{{m_g}n}} = ({a_{mi}},{a_{m(i - 1)}}, \cdots ,{a_{m0}}){{({p^i},{p^{i - 1}}, \cdots ,1)}^{\rm{T}}} + {\rm{er}}{{\rm{r}}_{mn}}} \end{array}} \right. $$ (6) 式中,${d_{{m_g}n}}$是第n个AP与${\rm{R}}{{\rm{P}}_{{m_g}}}$间的实际距离;${s_{{m_g}n}}$是该分区虚拟${\rm{R}}{{\rm{P}}_{{m_g}}}$的拟合值。用虚拟${\rm{R}}{{\rm{P}}_{{m_g}}}$和${s_{{m_g}n}}$来建立离线指纹库。在式(6)中,用errmn来代替第m个分区中所有的虚拟RP接收到的来自APn的噪声干扰,这就是本文算法在式(4)中没加入噪声的原因。
-
本文采用C均值聚类算法提高在线阶段的计算效率。设${\rm{R}}{{\rm{P}}_{{c_f}}}$为第c簇的第f个虚拟RP:
$$ {r_{cn}} = \frac{1}{F}\sum\limits_{f = 1}^F {{r_{{c_f}n}}} $$ (7) 式中,rcn为第c簇的所有虚拟RP来自APn的RSS的平均值;${r_{{c_f}n}}$为在虚拟${\rm{R}}{{\rm{P}}_{{c_f}}}$处拟合的RSS。把各个聚类中心的RSS都存入离线指纹库。
在线阶段,设来自第n个AP的RSS为on(t)。首先计算在线阶段时,离线指纹库的聚类中心与所接收到的RSS间的欧氏距离为:
$$ {d_c} = \sqrt {\sum\limits_{n = 1}^N {[{{\bar o}_n}(t) - {r_{cn}}]} } $$ (8) 设簇B是dc中值最小的那一簇,簇B中第f个虚拟RP为${\rm{R}}{{\rm{P}}_{{B_f}}}$。再计算在线阶段${\rm{R}}{{\rm{P}}_{{B_f}}}$处拟合的RSS与接收到的WiFi信号间的欧氏距离:
$$ {{{d}}_f} = \sqrt {\sum\limits_{n = 1}^N {[{{\bar o}_n}(t) - {r_{{B_f}n}}]} } $$ (9) 式中,${r_{{B_f}n}}$为在${\rm{R}}{{\rm{P}}_{{B_f}}}$处拟合得到的来自第n个AP的RSS。最后采用WKNN(加权K最近邻)算法估计定位坐标(${x_W},{y_W}$):
$$ \left\{ {\begin{array}{*{20}{l}} {\omega _{{j}}} = \frac{{1/{d_j}}}{{\sum\limits_{j = 1}^K {1/{d_j}} }} \\ ({x_W},{y_W}) = \sum\limits_{j = 1}^K {{\omega _j}({x_j},{y_j})} \\ \end{array}} \right. $$ (10) 式中,ωj为与之相对应的第j个最靠近虚拟RP的权重;dj为第j个最靠近虚拟RP的欧氏距离;(xj, yj)为第j个最靠近RP的坐标。
-
在线阶段定位时,即使手机处于静止状态,接收到的WiFi信号也是波动的,导致定位坐标就会随之跳动。为了减小定位坐标跳动对定位精度的影响,本文提出设定阈值的SIR粒子滤波对WKNN的定位坐标进行优化。SIR粒子滤波的重要性概率密度函数定义为:
$$ \left\{ {\begin{array}{*{20}{l}} {{{x}}_{{\rm{state}}}}(t) = x(t - 1) + v(t - 1) \;\; t > 1 \\ {y_{{\rm{state}}}}(t) = y(t - 1) + v(t - 1) \;\; t > 1 \\ \end{array}} \right. $$ (11) 式中,(xstate(t), ystate(t))是由t-1时刻的定位坐标(x(t-1), y(t-1))预测的t时刻的定位坐标;v(t-1)是在t-1时刻的目标状态噪声。
实验发现在t-1时刻的SIR粒子滤波算法预测的定位坐标可能与t时刻的WKNN算法得到的定位坐标相差较大,并且在t=1时刻,用WKNN算法估计的定位误差也可能很大,使得SIR粒子滤波算法太依赖初始坐标以及初始粒子。为了保证初始粒子具有足够的有效性,首先,把前5个时刻的WKNN算法的定位坐标的平均值作为初始坐标,然后,计算t-1时刻的SIR粒子滤波预测的定位坐标(xp(t-1), yp(t-1))与WKNN算法估计的定位坐标(${x_W},{y_W}$)之间的相对距离:
$${{z}}(t) = \sqrt {{{[{x_p}(t - 1) - {x_W}(t)]}^2} + {{[{y_p}(t - 1) - {y_W}(t)]}^2}} $$ (12) 最后,设置合理的的阈值zh来得到最终的定位坐标(xfinal(t), yfinal(t))。原理如下:若z(t) > zh,(xp(t-1), yp(t-1))作为最终的定位坐标;否则,(xW(t), yW(t))就是最终的定位坐标。并通过比较定位误差的大小,寻找最优阈值。
为了评价P-FP和PS-FP算法的定位性能,本文在每个分区都部署了一个测试点,并计算在t时刻的第n个测试点(xtest, ytest)的定位误差:
$$ {e_n}(t) = \sqrt {{{[{x_{{\rm{test}}}} - {x_{{\rm{final}}}}(t)]}^2} + {{[{y_{{\rm{test}}}} - {y_{{\rm{final}}}}(t)]}^2}} $$ (13) -
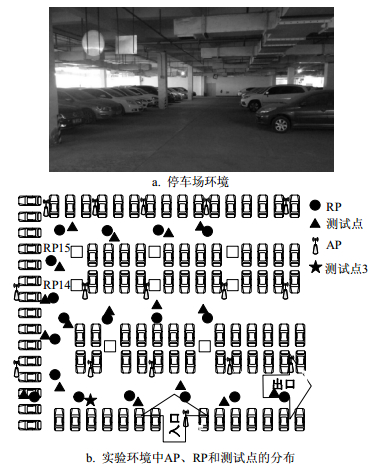
图 2a为本文的实验场景——成都市电子科技大学科技园的室内停车场。该室内停车场尺寸为46.7 m×48.5 mm2。在该停车场内共部署了16个AP和18个RP,部署原则为在5 m×5 m的区域内只能部署一个AP,在3 m×3 m的区域内只能部署一个RP,其中,部署的AP需遍布整个停车场。由于行人在寻车的过程中多出现在停车场的行车通道内,因此在实验中,把RP部署在行车通道的上方。有18个测试点来测试本文的算法。部署的RP、AP和测试点在室内停车场中的分布如图 2b所示。

图 2 实验环境
离线数据包括在每个测试点采集来自所有AP的RSS数据,以及在每个RP处采集来自所有AP的RSS数据。每秒采集一次数据,分别采集200个数据。AP采用的是LF-XD 9300吸顶式WiFi,如图 3所示。

图 3 LF-XD 9300路由器
-
本文把WiFi信号波动范围的大小设定为0.5σmn,通过高斯滤波得到每个RP接收到的来自所有AP的RSS的加权平均值。
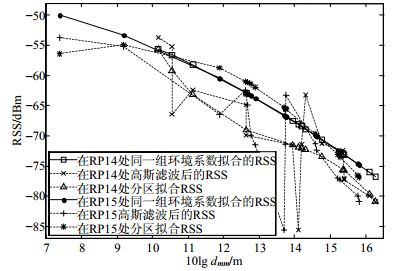
为了分析每个RP处拟合的RSS与高斯滤波得到的RSS的差异,本文在RP14和RP15处进行了测试,如图 4所示。在横坐标10lgdmn大约为14时,在RP15处来自不同AP的高斯滤波后的RSS相差较大,在RP15处和RP14处来自同一个AP的高斯滤波后的RSS差距较大,且用整组环境系数拟合得到的RSS与高斯滤波后的RSS差距仍然较大。同时在实际环境中发现,在同一区域都有相似的水泥柱子、通风管道、隔离区等,但在不同的区域,实际环境不太相同。因此,用整个停车场环境的环境系数并不能完全反映整个室内停车场的环境。由图 4可知,采用各分区的环境系数进行拟合得到的RSS与实际测量的RSS非常接近。

图 4 比较两个RP处拟合的RSS与高斯滤波的RSS
-
本文在面积为2 265 m2的室内停车场内,共部署了18个RP,相当于在平均面积为120 m2的区域内只部署了一个RP,即120 m2/1RP。与文献[3, 8-9]中的1 m2/1RP相比,样本数量大大减小。
为了实现较高的定位精度,本文提出了P-FP算法来构建离线指纹库。在建立离线指纹库前,先对整个室内停车场环境进行分区,并部署虚拟RP。其中,虚拟RP的部署原则为网格相邻交点之间的距离为1 m。由于在停车场的某些区域没有车辆的存在,如储物间、隔离带和水泥柱子等,为了减少在线阶段定位的计算量,本文在这些区域没有部署虚拟RP,如图 5所示。

图 5 虚拟RP和分区的分布
-
在C均值聚类实验中,本文把簇的总数设为13。从图 6可以看出,聚类结果没有出现簇之间的重叠现象。这是由于式(4)拟合得到的不同分区的环境系数,并用式(5)~式(6)来拟合得到的不同分区的虚拟RP的RSS具有较大的差别。本文利用误差特性矩阵中对应的误差特性差值来代替噪声,因为各分区的误差特性向量差异较大,所以分区间虚拟RP的RSS差异也较大,因此聚类效果与区的划分有着相似的关系。

图 6 C均值聚类的效果
-
本节通过所有测试点的平均定位误差(mean location error, MLE)以及累积分布函数(cumulative distribution function, CDF)来评价P-FP和PS-FP的定位性能。文献[3]发现随着WKNN算法中K值的增加,定位误差会减小,但当K > 4时,定位误差会保持稳定。本文实验也测试了K值从1~10时对定位性能的影响,发现当K=4时,能达到较好的定位效果,所以本文把K值设为4。采用本文算法按式(8)~式(13)得到18个测试点的200个时刻的定位误差。并且通过实验发现图 2b中的测试点3的MLE是最大的。
为了验证本文提出的P-FP与PS-FP算法的定位性能,分析了在测试点3的定位误差,其中,PS-FP算法的阈值设为1。图 7可知,P-FP算法的定位误差大都在2 m以内。而先采用P-FP算法,再经过PS-FP算法后,其定位误差大都在1 m以内。采用PS-FP可以极大的减小定位误差,并且定位误差的波动幅度也得到了显著的减小。

图 7 对比测试点3的P-FP与PS-FP的定位误差
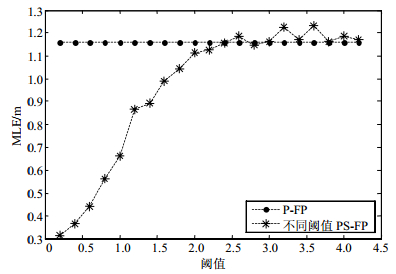
为了寻找SIR粒子滤波的最优阈值zh,本文分别测试了zh从0.2~4.2(步进0.2)的定位性能。从图 8可知,对PS-FP算法设定不同的阈值所得到的MLE的大小是不同的,随着zh的增加,PS-FP算法的MLE越来越趋近于P-FP算法的MLE。当zh > 1时,MLE显著增大,当zh > 2.5时,SIR粒子滤波的效果就会变差。通过实验发现,阈值zh越小,定位误差也越小,但阈值越小表明算法越依赖初始的定位坐标。因此,为了提高定位精度同时降低对初始坐标的依赖性,本文把PS-FP算法的最优阈值zh设为1,同时也是图 7中的阈值zh设为1的原因。

图 8 在不同阈值下的所有测试点的MLE
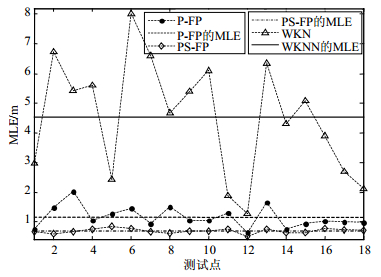
采用WKNN、P-FP和PS-FP算法分别计算18个测试点的200个时刻的MLE,如图 9所示。图 9表明,虽然由于SIR粒子滤波的初始粒子不一样,可能导致每次滤波的定位误差不尽相同,但采用P-FP与PS-FP算法,每个测试点的MLE都显著减小,WKNN算法的MLE约为4.5 m,P-FP算法和PS-FP算法的MLE分别约为1.2 m和0.7 m。P-FP算法和PS-FP算法的定位精度比WKNN算法的定位精度分别提高了3.3 m和3.8 m。

图 9 每个测试点的MLE
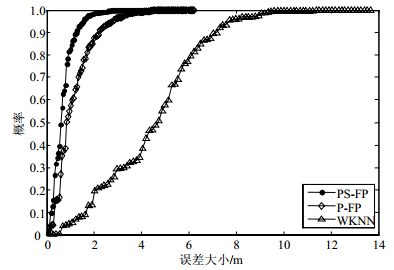
本文通过采用定位误差的累积分布函数来统计误差的概率分布。由图 10可知,在部署较少的RP即样本较小的条件下,采用WKNN算法在2 m以内的定位误差仅有14%,而采用本文提出的P-FP算法和PS-FP算法在2 m以内的定位误差分别达到了86%和98%。从18个测试点的平均定位误差和定位误差的累积分布概率值可知,本文提出的PS-FP算法在RP部署有限的条件下,依然能实现高精度的定位。

图 10 不同算法的定位误差的累积分布概率
为了进一步评价P-FP和PS-FP的定位性能,与文献[3, 8-9]的算法进行复杂度和定位精度的多重对比,平均定位误差MLE、累积分布函数CDF的结果如表 1所示。
-
本文提出并测试了一种基于小样本的高精度室内停车场指纹定位算法。该算法建立了室内停车场的分区拟合模型,采用提出的P-FP算法来建立离线指纹库,并用PS-FP算法来优化定位坐标。本文所提算法部署的RP之间的距离都在5 m以上,而文献[3, 8-9]部署的RP之间的距离仅有1 m,即本文所提算法大大减小了样本量。实验结果表明,用传统的WKNN算法得到的所有测试点的MLE约为4.5 m,采用P-FP算法得到的MLE约为1.2 m,PS-FP算法得到的MLE仅为0.7 m。PS-FP算法比WKNN算法得到的MLE减小了3.8 m,即提高了84%的定位精度。采用WKNN算法仅有14%的定位误差在2 m以内,采用P-FP算法有86%的定位误差在2 m以内,而采用PS-FP算法在2 m以内的定位误差会达到98%。
A High Accuracy Fingerprint Location Algorithm Based on Small Sample for Indoor Parking Lot
-
摘要: 针对传统指纹定位算法在离线阶段采集样本工作量较大的问题,该文利用一种分区拟合值近似法(P-FP)来建立离线指纹库。为了解决在线阶段由于WiFi信号的波动导致的定位精度较低的问题,提出一种基于P-FP的设定阈值的序贯重要性采样(SIR)粒子滤波算法(PS-FP)来优化定位坐标。首先建立了路径的损耗模型,并对室内停车场进行分区拟合,得到每个分区的环境系数;然后用拟合值与实际测量值的差值来建立误差特性矩阵,并重新部署虚拟的参考节点(RP);最后对离线指纹库进行C均值聚类。通过比较平均定位误差(MLE)寻找PS-FP算法的最优阈值,并采用PS-FP算法来优化在线定位坐标。实验结果表明,在部署很少的RP即获取样本比较少的条件下,PS-FP算法依然能达到较高的定位精度,其平均定位误差约为0.7 m。累积分布函数(CDF)的分析结果表明,采用PS-FP算法在2 m以内的定位误差能达到98%。Abstract: According to the large sampling workload for traditional fingerprint localization algorithms in the offline phase, a partition fitting approximation method (P-FP) is proposed to construct the offline fingerprint database. To solve the problem of the low location accuracy caused by the fluctuation of the WiFi signal in the online phase, the PS-FP algorithm, a sampling importance resampling (SIR) particle filter with threshold based P-FP, is further proposed. The entire indoor parking lot is partitioned, and the environmental coefficients of each partition can be gained by using the polynomial fitting model. And the error characteristic matrix is established with the difference between the fitting values and the actual measured values. Then, the virtual reference points (RPs) is redeployed, and C-means clustering is utilized for the offline fingerprint database. The optimal threshold is obtained by comparing the mean location error (MLE), then the PS-FP is used to optimize the online location coordinates. Experimental results demonstrate that PS-FP can achieve high location accuracy when the RP is fewer, and the mean location error is only about 0.7 m. Cumulative distribution function (CDF) shows that 98% of the location errors are within 2 m obtained by PS-FP.
-
Key words:
- accuracy /
- fingerprinting /
- indoor location /
- particle filter /
- WiFi
-
[1] MIKE H, JAMES S, JOHN K. Location-aware computing comes of age[J]. Computer, 2004, 37(2):95-97. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=3a4b2dd2c216a1042210d48659939fb3 [2] CHENG Lin, QIAO Tian-zhu. Localization in the parking lot by parked-vehicle assistance[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(12):3629-3634. doi: 10.1109/TITS.2016.2547987 [3] 周瑞.应用室内结构布局提高Wi-Fi定位精度和稳定性[J].电子科技大学学报, 2013, 42(2):295-299. http://manu50.magtech.com.cn/dzkjdx/CN/abstract/abstract575.shtml ZHOU Rui. Improve the accuracy and stability of Wi-Fi fingerprinting by applying the interior structure of buildings[J]. Journal of University of Electronic Science and Technology of China, 2013, 42(2):295-299. http://manu50.magtech.com.cn/dzkjdx/CN/abstract/abstract575.shtml [4] MA Rui, GUO Qiang, HU Chang-zhen, et al. An improved WiFi indoor positioning algorithm by weighted fusion[J]. Sensors, 2015, 15:21824-21843. doi: 10.3390/s150921824 [5] WU Zheng, JEDARI E, MUSCEDERE R, et al. Improved particle filter based on WLAN RSSI fingerprinting and smart sensors for indoor localization[J]. Computer Communications, 2016, 83:64-71. doi: 10.1016/j.comcom.2016.03.001 [6] DEAK G, CURRAN K, CONDELL J. A survey of active and passive indoor localisation systems[J]. Computer Communications, 2012, 35:1939-1954. doi: 10.1016/j.comcom.2012.06.004 [7] SHU Yuan-chao, HUANG Ying-hua, ZHANG Jia-qi, et al. Gradient-based fingerprinting for indoor localization and tracking[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 63(4):2424-2433. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=03ba6b6ddd159e430f002d1d9dde08dd [8] 黎海涛, 齐双.基于室内地图环境信息的多楼层WiFi定位技术研究[J].电子科技大学学报, 2017, 46(1):32-37. doi: 10.3969/j.issn.1001-0548.2017.01.006 LI Hai-tao, QI Shuang. Indoor map information based WiFi positioning technology for multi-floor buildings[J]. Journal of University of Electronic Science and Technology of China, 2017, 46(1):32-37. doi: 10.3969/j.issn.1001-0548.2017.01.006 [9] LI Dong, YAN Yan, ZHANG Bao-xian, et al. Measurement-based AP deployment mechanism for fingerprint-based indoor location systems[J]. KSⅡ Transactions on Internet and Information Systems, 2016, 10(4):1611-1629. [10] SÁNCHEZ-RODRÍGUEZ D, HERNÁNDEZ-MORERA P, JOSÉ M Q, et al. A low complexity system based on multiple weighted decision trees for indoor localization[J]. Sensors, 2015, 15:14809-14829. doi: 10.3390/s150614809 [11] KAEMARUNGSI K, KRISHNAMURTHY P. Analysis of WLAN's received signal strength indication for indoor location fingerprinting[J]. Pervasive and Mobile Computing, 2012, 8:292-316. doi: 10.1016/j.pmcj.2011.09.003 [12] EISENBLATTER A, GEERDES H F, SIOMINA I. Integrated access point placement and channel assignment for wireless LANs in an indoor office environment[C]//World of Wireless, Mobile and Multimedia Networks.[S.l.]: IEEE, 2007: 1-10. [13] MAKSURIWONG K, VARAVITHYA V, CHAIYARATANA N. Wireless LAN access point placement using a multi-objective genetic algorithm[C]//IEEE International Conference on Systems, Man and Cybernetics.[S.l.]: IEEE, 2003: 1944-1949. [14] ZIRARI S, CANALDA P, MABED H, et al. Wi-Fi access point placement within stand-alone, hybrid and combined wireless positioning systems[C]//IEEE Transactions on ICCE.[S.l.]: IEEE, 2012: 279-284. [15] SHARMA C, WONG Y F, SOH W S, et al. Access point placement for fingerprint-based localization[C]//IEEE International Conference on Communication Systems.[S.l.]: IEEE, 2010: 238-243. [16] TIAN Yong, TANG Zhe-nan, YU Yan. Third-order channel propagation model-based indoor adaptive localization algorithm for wireless sensor networks[J]. IEEE Antennas and Wireless Propagation Letters, 2013, 12:1578-1581. doi: 10.1109/LAWP.2013.2293578 [17] 田勇.室内无线传感器网络环境自适应定位和路由算法研究[D].大连: 大连理工大学微电子学与固体电子学, 2014. http://cdmd.cnki.com.cn/Article/CDMD-10141-1015573844.htm TIAN Yong. Research on environmental-adaptive localization and routing algorithms for indoor wireless sensor networks[D]. Dalian: Dalian University of Technology, 2014. http://cdmd.cnki.com.cn/Article/CDMD-10141-1015573844.htm [18] WYNE S, SINGH A P, TUFVESSON F, et al. A statistical model for indoor office wireless sensor channels[J]. IEEE Transactions on Wireless Communications, 2016, 17(12):3629-3634. http://ieeexplore.ieee.org/document/5200976/ [19] GU Zhuan, CHEN Ze-qin, ZHANG Yue-xing, et al. Reducing fingerprint collection for indoor localization[J]. Computer Communications, 2016, 83:56-63. doi: 10.1016/j.comcom.2015.09.022 [20] HAEBERLEN A, FLANNERY E, LADD A, et al. Practical robust localization over large-scale 802.11 wireless networks[C]//The Annual International Conference on Mobile Computing and Networking. Philadelphia, USA: [s.n], 2004: 70-84. [21] HUSEN M N, LEE S. Indoor human localization with orientation using WiFi fingerprinting[C]//The 8th ICUIMC.[S.l.]: IEEE, 2014: 10.1145/2557977.2557980. [22] GALVÁAN-TEJADA C E, GARCÍA-VÁZQUEZ J P, BRENA R F. Magnetic field feature extraction and selection for indoor location estimation[J]. Sensors, 2014, 14:11001-11015. doi: 10.3390/s140611001 [23] WU Bing-fei, JEN C. Particle-filter-based radio localization for mobile robots in the environments with low-density WLAN APs[J]. IEEE Transactions on Industrial Electronics, 2014, 61(12):6860-6870. doi: 10.1109/TIE.2014.2327553 [24] HE Xiang, LI Jia, ALOI D. WiFi based indoor localization with adaptive motion model using smartphone motion sensors[C]//ICCVE. Vienna, Austria: [s.n.], 2014: 786-791. [25] 章坚武, 张璐, 应瑛, 等.基于ZigBee的RSSI测距研究[J].传感技术学报, 2009, 22(2):285-288. doi: 10.3969/j.issn.1004-1699.2009.02.029 ZHANG Jian-wu, ZHANG Lu, YING Ying, et al. Research on distance measurement based on RSSI of ZigBee[J]. Chinese Journal of Sensors and Actuators, 2009, 22(2):285-288. doi: 10.3969/j.issn.1004-1699.2009.02.029 [26] 万国峰, 钟俊, 杨成慧.改进的RSSI测距和定位算法[J].计算机应用研究, 2012, 29(11):4156-4158. doi: 10.3969/j.issn.1001-3695.2012.11.040 WAN Guo-feng, ZHONG Jun, YANG Cheng-hui. Improved algorithm of ranging and locating based on RSSI[J]. Application Research of Computers, 2012, 29(11):4156-4158. doi: 10.3969/j.issn.1001-3695.2012.11.040 [27] 张兴. WLAN室内定位信号特征提取算法研究[D].黑龙江: 哈尔滨工业大学, 2013. http://cdmd.cnki.com.cn/Article/CDMD-10213-1014001451.htm ZHANG Xing. Signal feature extraction algorithm in WLAN indoor localization[D]. Heilongjiang: Harbin Institute of Technology, 2013. http://cdmd.cnki.com.cn/Article/CDMD-10213-1014001451.htm -

 点击查看大图
点击查看大图
图(10) / 表(1)
计量
- 文章访问数: 4175
- HTML全文浏览量: 1304
- PDF下载量: 93
- 被引次数: 0
