 ISSN
ISSN 


-
作为新能源消纳和供电可靠性提升的一种重要手段,微电网有着十分广泛的发展前景[1-3]。为了实现孤岛运行,微电网中不仅含有不可控的电源,如风电和光伏电源等,还有可控的如微型燃气轮机、柴油发电机等。前者常常采用电流型控制方式控制三相不平衡分量[4-5],其三相电流对称运行;后者则采用电压型控制方式[6],其三相电压对称运行。微电网主要接入中低压配网,其三相潮流的不对称运行状态普遍存在,电流型和电压型电源对其三相潮流的控制存在明显的差异。相对而言,风电等新能源发电功率的随机扰动远远大于传统负荷。当微电网孤岛运行且其内部风电功率渗透率较大时,风电功率的大幅扰动会给微电网的三相潮流和频率控制带来巨大挑战。因此,为了保证微电网的安全经济运行,有必要考虑风电功率扰动及微电源控制方式影响的孤岛微电网三相潮流的优化控制问题。
迄今为止,孤岛微电网三相潮流优化的相关研究较少。在约束方面,一般都考虑了电压幅值和线路传输功率的潮流安全约束。在目标函数方面,文献[7-8]采用了系统网损最小的目标,文献[9]采用了载荷能力和成本综合最优的目标。在微电源的频率电压控制特性方面,通常假定可控微电源的单相有功和无功功率独立可控、不可控微电源的单相有功和无功功率给定不可调[7]。文献[8-9]假设微电源采用电压型控制方式,同时文献[8]还考虑了源荷功率的频率特性以及频率的安全约束,通过微电源一次调节特性系数(下垂系数)和空载频率的优化控制,来满足源荷功率预测状态的潮流和频率安全约束,其本质上是利用了电源功率的一次二次调节特性。
考虑微电网的微电源控制特点,三相潮流的优化应该同时计及微电源的电流型和电压型控制特性。考虑风电渗透率大的场景以及孤岛微电网频率电压的实时控制要求,三相潮流的优化不仅应该计及预测状态的潮流和频率安全约束,还应该计及极端扰动状态的潮流和频率安全约束。为此,本文提出并建立了计及源荷功率极端扰动的孤岛微电网三相潮流的优化控制模型。
-
本文模型适用于孤岛微电网三相潮流的实时控制,其决策周期为分钟级,可选择5~15 min为一个周期。在实时控制中,假设已知系统当前潮流和频率的初始值和下一时刻源荷功率的预测值及其可能的极端预测误差。为了便于区分系统的运行状态,将初值、预测值和正负极端预测误差值与系统的初始状态、正常状态以及正负极端扰动状态相对应。因此,本文模型的目标函数为微电网正常状态的系统网损最小,约束方程包括:1)微电网的潮流与频率安全约束;2)微电源的电流电压控制方程及功率约束方程;3)微电源与负荷功率的一次调节方程;4)微电源功率的二次调节方程。其中,约束条件1)~3)有3套,其数学表达式相同,但变量的值不同,分别对应正常状态、正极端状态与负极端状态,本文称之为正常与极端扰动状态的同类型约束。而约束条件4)只有1套,对应正常状态。
基于上述思路,本文所建模型具体如下。
-
采用正常状态的最小系统网损J为目标函数:
$$ J = \sum\limits_{i = 1}^n {{P_{{\text{G}}i, {\text{N}}}}} + \sum\limits_{i = 1}^n {{P_{{\text{W}}i, {\text{N}}}}} - \sum\limits_{i = 1}^n {\sum\limits_{d = a, b, c} {P_{{\text{D}}i, {\text{N}}}^d} } $$ (1) 式中,变量P表示有功;下标G、W和D分别表示可控微电源、风电机组和负荷;i表示节点编号;N表示正常状态(以下相同);上标d表示d相,d∈{a, b, c};n为系统节点数;PGi, N表示可控微电源的三相总有功功率;PWi, N表示风电机组的三相总有功功率; $P_{{\rm{D}}i,{\rm{N}}}^d$表示负荷的d相有功功率。
-
本文模型所确定的决策方案不仅能满足下一时段预测功率状态潮流的安全性与最优性,还能满足下一时段内极端扰动状态潮流的安全性。本文将实际源荷功率相对其预测值的增量系数定义为扰动系数或预测误差系数。现有研究中通常假设风电或者负荷功率的预测误差服从正态分布[10],本文取预测误差正态分布的1~3倍标准差大小为极端扰动系数。实际系统中可以根据决策周期内源荷功率的预测误差历史数据统计其标准差,然后再确定极端扰动系数大小。
为了便于理解,在下文的公式中,用下标E表示系统所处的状态,可以是正常以及正、负极端扰动状态(下标H和L)中的任何一种,即E∈{N,H,L}。本文模型中,正极端扰动状态是指风功率取正极端扰动系数同时负荷取负极端扰动系数时的情形,此时预测误差造成最大的正向功率偏差;负极端扰动状态则是指风功率取负极端扰动系数同时负荷取正极端扰动系数时的情形,此时预测误差造成最大的负向功率偏差。
-
微电网的潮流安全约束通常包括有功无功平衡、线路传输功率和节点电压幅值约束等。频率安全约束为限定的范围,具体如下。
1) 微电网的潮流方程为:
$$ \left\{ {\begin{array}{*{20}{c}} {P_{{\rm{G}}i, {\rm{E}}}^d + P_{{\rm{W}}i, {\rm{E}}}^d - P_{{\rm{D}}i, {\rm{E}}}^d - P_{i, {\rm{E}}}^d = 0}\\ {Q_{{\rm{G}}i, {\rm{E}}}^d + Q_{{\rm{W}}i, {\rm{E}}}^d - Q_{{\rm{D}}i, {\rm{E}}}^d - Q_{i, {\rm{E}}}^d = 0} \end{array}} \right. $$ (2) 式中,变量Q表示无功;$i \in {\Phi _{\rm{B}}}$,ΦB为所有节点集合。$P_{i, {\rm{E}}}^d$、$Q_{i, {\rm{E}}}^d$为节点i的d相有功注入和无功注入,由三相线路结构参数和节点电压状态计算:
$$ \left\{ \begin{array}{l} P_{i,{\rm{E}}}^d = \sum\limits_{j = 1 \atop j \ne i }^n {\sum\limits_{x = a,b,c} {U_{i,{\rm{E}}}^dy_{ij}^{dx}U_{i,{\rm{E}}}^x\cos (\alpha _{ij}^{dx} + \theta _{i,{\rm{E}}}^x - \theta _{i,{\rm{E}}}^d) - } } \\ {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} \sum\limits_{j = 1 \atop j \ne i }^n {\sum\limits_{x = a,b,c} {U_{i,{\rm{E}}}^dy_{ij}^{dx}U_{j,{\rm{E}}}^x\cos (\alpha _{ij}^{dx} + \theta _{j,{\rm{E}}}^x - \theta _{i,{\rm{E}}}^d)} } \\ Q_{i,{\rm{E}}}^d = \sum\limits_{j = 1 \atop j \ne i }^n {\sum\limits_{x = a,b,c} {U_{i,{\rm{E}}}^dy_{ij}^{dx}U_{j,{\rm{E}}}^x\sin (\alpha _{ij}^{dx} + \theta _{j,{\rm{E}}}^x - \theta _{i,{\rm{E}}}^d) - } } \\ {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} \sum\limits_{j = 1 \atop j \ne i }^n {\sum\limits_{x = a,b,c} {U_{i,{\rm{E}}}^dy_{ij}^{dx}U_{i,{\rm{E}}}^x\sin (\alpha _{ij}^{dx} + \theta _{i,{\rm{E}}}^x - \theta _{i,{\rm{E}}}^d)} } \end{array} \right. $$ (3) 式中,U为节点电压幅值;θ为节点电压相角;$y_{ij}^{dx}$和$\alpha _{ij}^{dx}$分别表示与i-j支路d-x相之间对应的导纳矩阵元素的模值和相角。
2) 线路的传输功率约束为:
$$ - {S_{ij, \min }} \le {S_{ij, {\rm{E}}}} \le {S_{ij, \max }} $$ (4) 式中,Sij为线路ij传输的视在功率;$i, j \in {\Phi _{\rm{B}}}$。
3) 节点的三相电压幅值约束为:
$$ U_{i, \min }^d \le U_{i, {\rm{E}}}^d \le U_{i, \max }^d $$ (5) 4) 系统的频率约束为:
$$ {f_{\min }} \le {f_{\rm{E}}} \le {f_{\max }} $$ (6) -
微电源包括可控微电源和不可控的风电机组,其各自的控制方程和功率约束方程具体如下。
1) 微电源的控制方程
可控微电源采用电压型控制方式,其并网节点满足电压对称条件,即有:
$$ \left\{ \begin{array}{l} U_{{\rm{G}}i, {\rm{E}}}^a = U_{{\rm{G}}i, {\rm{E}}}^b = U_{{\rm{G}}i, {\rm{E}}}^c\\ \theta _{{\rm{G}}i, {\rm{E}}}^a = \theta _{{\rm{G}}i, {\rm{E}}}^b + \frac{{2\pi }}{3} = \theta _{{\rm{G}}i, {\rm{E}}}^c - \frac{{2\pi }}{3} \end{array} \right. $$ (7) 式中,$i \in {\Phi _{\rm{G}}}$,ΦG为可控微电源所在节点集合。
风电机组采用电流型控制方式[11],其并网节点满足电流对称条件,即有:
$$ \left\{ \begin{array}{l} I_{{\rm{W}}i, {\rm{E}}}^a = I_{{\rm{W}}i, {\rm{E}}}^b = I_{{\rm{W}}i, {\rm{E}}}^c\\ \delta _{{\rm{W}}i, {\rm{E}}}^a = \delta _{{\rm{W}}i, {\rm{E}}}^b + \frac{{2\pi }}{3} = \delta _{{\rm{W}}i, {\rm{E}}}^c - \frac{{2\pi }}{3} \end{array} \right. $$ (8) 式中,IW和δW别表示风电机组注入电流的幅值和相角;$i \in {\Phi _{\rm{W}}}$,ΦW为风电机组所在节点集合;
2) 功率约束方程
可控微电源的三相总有功功率和无功功率为单相功率之和:
$$ \left\{ {\begin{array}{*{20}{l}} {{P_{{\rm{G}}i,{\rm{E}}}} = \sum\limits_{d = a,b,c} {P_{{\rm{G}}i,{\rm{E}}}^d} }\\ {{Q_{{\rm{G}}i,{\rm{E}}}} = \sum\limits_{d = a,b,c} {Q_{{\rm{G}}i,{\rm{E}}}^d} } \end{array}} \right.i \in {\Phi _{\rm{G}}} $$ (9) 可控微电源的三相总功率约束为:
$$ \left\{ {\begin{array}{*{20}{l}} {{P_{{\rm{G}}i,{\rm{min}}}} \le {P_{{\rm{G}}i,{\rm{E}}}} \le {P_{{\rm{G}}i,{\rm{max}}}}}\\ {{{({P_{{\rm{G}}i,{\rm{E}}}})}^2} + {{({Q_{{\rm{G}}i,{\rm{E}}}})}^2} \le {{({S_{{\rm{G}}i,{\rm{max}}}})}^2}} \end{array}} \right. $$ (10) 式中,SG, max为可控微电源的额定容量。
风电机组正常状态和极端扰动状态的有功功率与初值状态有功功率的关系为:
$$ {P_{{\rm{W}}i, E}} = (1 \pm {\gamma _{\rm{W}}})(1 + {\zeta _i}){P_{{\rm{W}}i, 0}}{\rm{ }}i \in {\Phi _{\rm{W}}} $$ (11) 式中,${\gamma _{\rm{W}}}$为风电功率的极端扰动系数,在正常状态下取为0;“±”在正极端扰动情形下取“+”,负极端扰动情形下取“-”;ζi为下一时刻预测风电功率相对当前功率的增量系数;下标0表示变量的初始状态。
风电机组的三相总有功功率和无功功率为单相功率之和:
$$ \left\{ {\begin{array}{*{20}{l}} {{P_{{\rm{W}}i, {\rm{E}}}} = \sum\limits_{d = a, b, c} {P_{{\rm{W}}i, {\rm{E}}}^d} }\\ {{Q_{{\rm{W}}i, {\rm{E}}}} = \sum\limits_{d = a, b, c} {Q_{{\rm{W}}i, {\rm{E}}}^d} } \end{array}} \right. $$ (12) 风电机组的容量约束为:
$$ {({P_{{\rm{W}}i, {\rm{E}}}})^2} + {({Q_{{\rm{W}}i, {\rm{E}}}})^2} \le {({S_{{\rm{W}}i, \max }})^2} $$ (13) 式中,SW, max为风电机组的额定容量。
假设本文所用微电源都是采用逆变器接口并网,因此有式(10)和式(13)的容量限制。
-
源荷的一次调节能力包括可控微电源的一次调节特性和负荷的一次调节特性。前者采用下垂控制[12]方法来实现,后者指其静态频率电压特性。包括以下两方面:
1) 可控微电源功率的一次调节方程
正常情况下,可控微电源功率的一次调节特性方程为:
$$ \left\{ {\begin{array}{*{20}{l}} {{P_{{\rm{G}}i, {\rm{N}}}} = {P_{{\rm{G}}i, 0}} - {K_{{\rm{Gp}}i}}({f_{\rm{N}}} - {f_0})}\\ {{Q_{{\rm{G}}i, {\rm{N}}}} = {Q_{{\rm{G}}i, 0}} - {K_{{\rm{Gq}}i}}(U_{i, {\rm{N}}}^1 - U_{i, 0}^1)} \end{array}} \right.{\rm{ }}i \in {\Phi _{\rm{G}}} $$ (14) 式中,KGpi、KGqi分别为有功-频率、无功-电压的一次调节特性系数;$U_i^1$为电源所在节点的正序电压幅值。
极端扰动下,可控微电源功率的一次调节特性方程为:
$$ \left\{ {\begin{array}{*{20}{l}} {{P_{{\rm{G}}i, {\rm{E'}}}} = {P_{{\rm{G}}i, {\rm{N}}}} - {K_{{\rm{Gp}}i}}({f_{{\rm{E'}}}} - {f_{\rm{N}}})}\\ {{Q_{{\rm{G}}i, {\rm{E'}}}} = {Q_{{\rm{G}}i, {\rm{N}}}} - {K_{{\rm{Gq}}i}}(U_{i, {\rm{E'}}}^1 - U_{i, {\rm{N}}}^1)} \end{array}} \right.{\rm{ }}i \in {\Phi _{\rm{G}}} $$ (15) 式中,E′∈{H,L}。
注意,式(14)和式(15)的数学表达式相同,但两者中频率和电压偏差的参考变量不一样。前者是正常状态对应初始状态的偏差,后者是极端状态相对正常状态的偏差。
2) 负荷功率的一次调节方程为:
$$ \left\{ {\begin{array}{*{20}{l}} \begin{array}{ccccc} P_{{\rm{D}}i,{\rm{E}}}^d = (1 \mp {\gamma _{\rm{D}}})(1 + {\lambda _i})[1 + {K_{{\rm{p}}i}}({f_{\rm{E}}} - {f_0})/{f_0}] \times \\ \left[ {A_{{\rm{p}},i}^d + B_{{\rm{p}},i}^d\left( {\frac{{U_{i,{\rm{E}}}^d}}{{U_{i,0}^d}}} \right) + C_{{\rm{p}},i}^d{{\left( {\frac{{U_{i,{\rm{E}}}^d}}{{U_{i,0}^d}}} \right)}^2}} \right]P_{{\rm{D}}i,0}^d \end{array}\\ \begin{array}{ccccc} Q_{{\rm{D}}i,{\rm{E}}}^d = (1 \mp {\gamma _{\rm{D}}})(1 + {\lambda _i})[1 + {K_{{\rm{q}}i}}({f_{\rm{E}}} - {f_0})/{f_0}] \times \\ \left[ {A_{{\rm{q}},i}^d + B_{{\rm{q}},i}^d\left( {\frac{{U_{i,{\rm{E}}}^d}}{{U_{i,0}^d}}} \right) + C_{{\rm{q}},i}^d{{\left( {\frac{{U_{i,{\rm{E}}}^d}}{{U_{i,0}^d}}} \right)}^2}} \right]Q_{{\rm{D}}i,0}^d \end{array} \end{array}} \right. $$ (16) 式中,${\gamma _{\rm{D}}}$为负荷的极端扰动系数,在正常状态下${\gamma _{\rm{D}}}$取为0;“$ \mp $”在正极端扰动情形下取“-”,负极端扰动情形下取“+”(与风电机组极端情形式(11)中符号取向相反);λi为下一时刻预测负荷相对当前时刻功率增量系数;K为负荷等效频率调节系数;下标p、q表示有功或无功分量;A、B和C分别表示恒功率、恒电流和恒阻抗负荷在总负荷中的比重系数,且A+ B+ C=1。
-
正常状态下可控微电源的二次调节方程为:
$$ \left\{ {\begin{array}{*{20}{l}} {{P_{{\rm{G}}i, {\rm{N}}}} = {P_{{\rm{G}}i, 0}} - {K_{{\rm{Gp}}i}}({f_{\rm{N}}} - {f_0}) + \Delta {P_{{\rm{G}}i, N}}}\\ {{Q_{{\rm{G}}i, {\rm{N}}}} = {Q_{{\rm{G}}i, 0}} - {K_{{\rm{Gq}}i}}(U_{i, {\rm{N}}}^1 - U_{i, 0}^1) + \Delta {Q_{{\rm{G}}i, {\rm{N}}}}} \end{array}} \right.{\rm{ }}i \in {\Phi _{\rm{G}}} $$ (17) 式中,ΔPGi, N、ΔQGi, N为可控微电源的有功、无功二次调节量。且有:
$$ \Delta {P_{{\rm{G}}i, {\rm{dn}}}} \le \Delta {P_{{\rm{G}}i, {\rm{N}}}} \le \Delta {P_{{\rm{G}}i, {\rm{up}}}}{\kern 1pt} $$ (18) 式中,ΔPGi, up和ΔPGi, dn为可控微电源允许向上和向下调节的有功功率,分别表示为:
$$ \Delta {P_{{\rm{G}}i, {\rm{up}}}} = \min \left\{ {{P_{{\rm{G}}i, \max }} - {P_{{\rm{G}}i, 0}}, {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} {R_{{\rm{G}}i}}} \right\} $$ $$ \Delta {P_{{\rm{G}}i, {\rm{dn}}}} = \max \left\{ {{P_{{\rm{G}}i, 0}} - {P_{{\rm{G}}i, \min }}, {\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} - {R_{{\rm{G}}i}}} \right\} $$ 式中,RGi为可控微电源在不计上下限限制时允许增加或减少的最大功率,即最大爬坡功率。
风电机组有功不参与一次调节,但可采用无功优化的方式参与无功调节[13]。
本文模型中,对极端扰动状态只考虑源荷功率的一次调节能力,而对于正常状态,则同时考虑了采用微电源功率的二次调节能力,因此,微电源功率的二次调节方程只有一套。
综上,本文模型中决策变量为可控微电源的有功和无功二次调节量以及风电机组的无功功率。
-
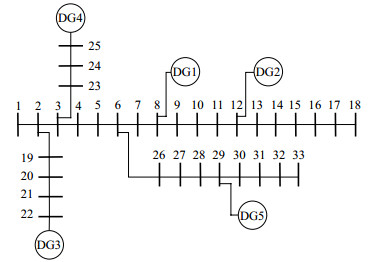
采用修改的IEEE 33节点系统来验证本文模型的有效性。IEEE 33节点系统接线如图 1所示,线路及负荷原始参数详见文献[14]。

图 1 IEEE 33节点修改系统的接线图
为了突出本文模型的特点,对算例系统进行了如下修改:假定各节点负荷由星形中性点接地方式的恒功率、恒电流和恒阻抗负荷组成,其组分系数、有功无功等效频率调节系数均相等,设为Ap = Aq= 0.85,Bp = Bq= 0.10,Cp = Cq= 0.05,KLp = 1.5,KLq =-1.0。
假设系统接入5个微电源,其中DG1~DG3为可控微电源,本文选用微型燃气轮机,同时参与一次二次调节,采用电压型控制方式。DG4和DG5为风电机组,其有功不参与调节,无功优化控制,采用电流型控制方式。各微电源的接入点位置、静特性系数、最大/最小有功出力及爬坡速率等如表 1所示。
表 1 可控微电源相关参数
DG 位置 KGp/p.u. KGq/p.u. ${{\frac{{{P_{G, \max }}}}{{{S_G}}}} \mathord{\left/ {\vphantom {{\frac{{{P_{G, \max }}}}{{{S_G}}}} {{\rm{p}}{\rm{.u}}{\rm{.}}}}} \right.} {{\rm{p}}{\rm{.u}}{\rm{.}}}}$ PG, min/p.u. RG/p.u. 1 8 200 400 4.0 0 3.00 2 12 100 200 2.0 0 1.50 3 22 150 300 3.0 0 2.25 4 25 - - 1.2 0 - 5 29 - - 1.2 0 - 假设修正系统负荷的a相功率等于原系统的3倍,b相功率等于原系统的1.5倍,c相功率等于原系统的2倍。取功率基准值为1 MW,电压基准值为12.66 kV,额定频率为50 Hz。下面算例参数如不加特别说明,均为标幺值。设定节点电压幅值的安全范围为[0.95, 1.05],频率的安全范围为[0.996, 1.004]。
当前时刻设定DG1~DG3的参考电压和频率均为1.0,风电机组DG4和DG5的三相有功功率输出均为0.8,三相无功功率输出均为0,参考文献[15]中频率电压特性的三相潮流方法进行微电网当前的潮流状态计算,得到系统当前频率为0.997 2,其他结果从略。
下一时刻设定所有节点负荷功率的预测值增量系数λi都为0.05,风电机组DG4和DG5输出有功的预测值增量系数ζi为0.10。本文系统中,假定负荷功率预测误差服从正态分布N(0, 0.032),其极端扰动系数取3倍标准差大小,即${\gamma _{\rm{D}}}$为0.09;风电功率的预测误差服从正态分布N(0, 0.102),其极端扰动系数${\gamma _{\rm{W}}}$为0.30。
本文所建模型为非线性约束规划问题,采用预测-校正原对偶内点法[16]进行求解。
-
本节分析是否考虑极端扰动对潮流优化结果的影响,以及分析极端扰动系数大小对潮流修正结果的影响。
-
为了分析是否考虑极端扰动对潮流优化结果的影响,借鉴文献[8]的模型特点,在本文模型基础上构造了不计极端扰动状态安全约束的优化潮流模型(单状态约束模型)。该模型由本文模型的目标函数和正常状态的关联约束方程构成。
在对单状态约束模型进行仿真时,首先基于相同的算例系统与潮流的初值,采用单状态约束模型进行优化计算,确定正常状态的三相潮流最优解。然后以此最优解为初始条件,考虑源荷功率的极端扰动以及源荷功率的一次调节能力,采用考虑频率电压特性的三相潮流方法[15]进行潮流计算,确定微电网极端扰动下的潮流与频率结果。该结果即为单状态约束模型在极端扰动下的修正结果。
基于本文模型和单状态约束模型以及2.1节的仿真条件进行计算,仿真结果如表 2所示。在本文模型中,fN、fH和fL为模型的正常状态、正极端扰动状态与负极端扰动状态的频率优化结果;在单状态约束模型中,fN为模型的正常状态频率优化结果,fH和fL为正极端扰动与负极端扰动条件下频率的两次修正结果。J 为模型的正常状态系统网损目标值。
表 2 单状态约束模型和本文模型的频率和网损结果
结果 单状态约束模型 本文模型 正常状态频率fN/p.u. 0.996 0 0.998 8 正极端扰动频率fH/p.u. 0.998 8 1.001 6 负极端扰动频率fL/p.u. 0.993 2 0.996 0 正常状态系统网损J/p.u. 0.078 9 0.081 3 对比频率的安全范围为[0.996, 1.004],观察表 2的频率结果可知,单状态约束模型中fL=0.993 2,不满足其安全范围。而其他频率结果都满足安全范围。同时观察表 2的系统网损结果可知,相比不计极端扰动的单状态约束模型,本文模型系统网损增加了3.04%。这说明不考虑极端扰动影响的单状态约束潮流模型,虽然其系统网损的目标更小,但当发生极端扰动时,正常状态的最优决策变量却可能导致系统频率的越限。而采用本文模型,可以在网损目标增加较小代价下,避免极端扰动造成的频率安全问题。显然,本文模型具有更强的鲁棒性。
-
为对比分析不同极端扰动系数大小对潮流优化结果的影响,本文以2.1节的源荷功率预测误差概率分布为基础,选用1倍、2倍和3倍标准差来表示极端扰动系数大小分别进行优化计算,潮流的优化结果具体如表 3所示。表中,方案1、2和3分别对应极端扰动系数等于1倍、2倍和3倍标准差时的情形。
表 3 不同扰动系数下频率和网损的优化结果
结果 方案1 方案2 方案3 正常状态频率fN/p.u. 0.996 9 0.997 9 0.998 8 正极端扰动频率fH/p.u. 0.997 9 0.999 7 1.001 6 负极端扰动频率fL/p.u. 0.996 0 0.996 0 0.996 0 正常状态系统网损J/p.u. 0.079 1 0.079 8 0.081 3 为了分析上述3个优化方案应对源荷功率随机扰动的能力,在3个优化方案的决策变量下,采用Monte Carlo仿真技术进行源荷功率的随机模拟和潮流状态的概率评估。其中,风电与负荷功率的随机样本分别选择10 000个。同时,假设各方案随机潮流计算中决策变量始终保持不变。相应微电网频率f和网损J的蒙特卡洛仿真结果如表 4所示。
表 4 微电网频率和网损的蒙特卡洛仿真结果
结果 方案 均值 标准差 最大值 最小值 越限概率/% f/p.u 1 0.997 0 6.68×10-4 0.999 5 0.994 4 7.29 2 0.997 9 6.65×10-4 1.000 6 0.995 5 0.21 3 0.998 9 6.78×10-4 1.001 5 0.996 5 0 J/p.u. 1 0.079 0 0.007 6 0.111 8 0.054 6 - 2 0.079 7 0.007 7 0.110 2 0.051 2 - 3 0.081 2 0.007 9 0.112 3 0.054 2 - 表 3结果显示,随着极端扰动系数的增大,优化方案下的正常状态系统频率由方案1的0.996 9增大到方案3的0.998 8,系统网损由方案1的0.079 1增大到方案3的0.081 3。这说明模型中选取的极端扰动系数越大,决策变量越保守,对应的系统网损目标越差,而正常状态系统频率越安全。
表 4结果显示,随着极端扰动系数的增大,在同样的风电与负荷功率随机扰动条件下,随机潮流计算中系统频率期望结果由方案1中的0.997增大到方案3中的0.998 9,系统网损由方案1中的0.079增大到方案3中0.081 2;系统频率的越限概率由方案1的7.29%逐步减小到方案3的0。这说明,在优化决策变量(二次调节量)确定的条件下,系统采用源荷一次调节应对正态分布的源荷功率随机扰动,其概率评估均值结果近似等于优化潮流结果。模型中选定的极端扰动系数越大,此时对应的决策变量越保守,因而系统网损将变差;但决策变量应对随机扰动的能力变强,系统频率越安全。
-
为了分析风电机组分别采用电流型和电压型控制方式对三相潮流调节能力的差异,对2.1节的算例仿真条件进行了修改。即DG4和DG5的控制方式从电流型改为电压型,其他参数不变。基于修改前后的仿真条件,采用本文模型进行优化计算,仿真结果如表 5所示。其中,风电机组采用电流型控制方式对应本文模型的优化结果即情景1,采用电压型控制方式为修改后的优化结果即情景2。
表 5 不同风机控制方法下各微电源功率正常状态的优化值
DG 相别 情景1 情景2 有功 无功 有功 无功 1 a 1.619 9 0.969 4 1.208 2 0.696 1 b 0.456 9 0.271 7 0.803 0 0.493 3 c 0.874 0 0.533 4 0.941 9 0.583 5 2 a 0.669 1 0.356 7 0.669 7 0.355 6 b 0.400 1 0.217 1 0.400 7 0.216 1 c 0.488 8 0.255 2 0.489 4 0.254 2 3 a 0.990 3 0.489 4 0.815 6 0.383 7 b 0.459 0 0.174 6 0.599 5 0.257 8 c 0.663 9 0.294 4 0.685 8 0.313 7 4 a 0.290 6 0.267 9 0.602 5 0.408 6 b 0.295 6 0.275 4 0.028 2 0.164 2 c 0.293 8 0.272 6 0.249 3 0.243 0 5 a 0.290 3 0.268 9 0.544 8 0.490 5 b 0.295 9 0.274 4 0.085 3 0.089 6 c 0.293 8 0.272 5 0.249 9 0.235 8 正常状态系统网损J/p.u. 0.081 3 0.070 6 观察表 5的情景1可以发现,DG4和DG5的三相有功最大偏差为1.93%,三相无功最大偏差为2.80%。而DG1、DG2和DG3的三相有功最大偏差为254.54%,最小偏差为22.17%;三相无功的最大偏差为256.79%,最小偏差为17.55%。这说明为了保证三相电流的对称要求以及三相电压的安全约束,电流型控制方式的微电源所输出的三相功率基本对称。而电压型微电源的三相电压对称,三相电流允许不同,因而三相功率可以有较大的调节范围。因此,当同时含有电流型与电压型控制方式微电源时,三相功率的不对称分量主要由电压型控制方式微电源承担。
观察表 5的情景1和情景2可以发现,情景1和情景2中DG1的a相有功和无功都是最大的,分别为1.619 9和0.969 4以及1.208 2和0.696 1,同时情景1的网损为0.081 3,情景2的网损为0.070 6;对比两者可以看到,情景2的最大单相功率和网损相对情景1有很大幅度的减小。这说明,对同样的不对称分量,电压型微电源的数量越多,微电源的最大单相功率越小,网损也越小。
-
本文建立了一种计及源荷功率极端扰动下的孤岛微电网三相潮流优化控制模型。IEEE 33节点修正算例的仿真验证了所提模型的有效性。算例结果表明:
1) 本文模型不仅能保证系统在正常状态的系统网损最小以及潮流和频率的安全,而且还能保证极端扰动条件下的潮流和频率安全,具有良好的鲁棒性;
2) 本文模型同时考虑了电流型和电压型微电源,因此本文模型可为含风电等新能源孤岛微电网的三相潮流优化控制提供科学的决策支撑;
3) 在调节三相不对称潮流时,电流型和电压型微电源的调节能力相差很大。电流型微电源输出的三相功率基本对称,负荷三相功率的不对称分量主要由电压型微电源承担。合理利用电压型微电源的三相调节能力,可有效解决潮流的不对称问题,降低微电网系统网损。
Three-Phase Power Flow Optimization Control Model for Islanded Microgrid by Considering Source-Load Power Extreme Disturbance
-
摘要: 考虑源荷功率的极端扰动对微电网潮流和频率的影响,以及电流型和电压型微电源在三相潮流控制方面的差异,提出了计及源荷功率极端扰动的孤岛微电网三相潮流的优化控制模型。该模型同时考虑了电流型和电压型两种微电源的控制方式以及源荷功率的静态频率电压特性。模型的目标函数为正常状态的系统网损最小,约束条件考虑了下一时刻源荷功率的正常状态和极端扰动状态的潮流及频率安全约束。为了满足潮流在频率控制方面的要求,对正常状态,除考虑源荷功率的一次调节能力以外,还考虑了电源功率的二次调节能力。而对极端扰动状态,只考虑了源荷功率的一次调节能力。模型的求解采用预测-校正原对偶内点法。IEEE 33节点修正算例系统的仿真结果验证了该模型的有效性。Abstract: For studying the impact of source-load power extreme disturbance on microgrid power flow and frequency, this paper proposes a three-phase power flow optimization control model for islanded microgrid by considering both current-controlled mode and voltage-controlled mode of micro power source as well as the static frequency-voltage characteristic of the source and load. This model uses the active power loss minimization in normal state as objective function and takes the power flow and frequency of the normal state and extreme disturbance state of the source and power under the next time as safety constraints. The power regulation of the optimization model includes the primary regulation ability of the source and load frequency-voltage characteristic, the secondary regulation ability of the controlled power source under normal conditions, and the primary regulation ability of the source and load during the extreme disturbance. The predictor corrector primal dual interior point method is used to solve the model. The simulation results of the IEEE 33 node modified system were used to demonstrate the effectiveness of the proposed model.
-
表 1 可控微电源相关参数
DG 位置 KGp/p.u. KGq/p.u. ${{\frac{{{P_{G, \max }}}}{{{S_G}}}} \mathord{\left/ {\vphantom {{\frac{{{P_{G, \max }}}}{{{S_G}}}} {{\rm{p}}{\rm{.u}}{\rm{.}}}}} \right.} {{\rm{p}}{\rm{.u}}{\rm{.}}}}$ PG, min/p.u. RG/p.u. 1 8 200 400 4.0 0 3.00 2 12 100 200 2.0 0 1.50 3 22 150 300 3.0 0 2.25 4 25 - - 1.2 0 - 5 29 - - 1.2 0 -  下载: 导出CSV
下载: 导出CSV
表 2 单状态约束模型和本文模型的频率和网损结果
结果 单状态约束模型 本文模型 正常状态频率fN/p.u. 0.996 0 0.998 8 正极端扰动频率fH/p.u. 0.998 8 1.001 6 负极端扰动频率fL/p.u. 0.993 2 0.996 0 正常状态系统网损J/p.u. 0.078 9 0.081 3
下载: 导出CSV
表 3 不同扰动系数下频率和网损的优化结果
结果 方案1 方案2 方案3 正常状态频率fN/p.u. 0.996 9 0.997 9 0.998 8 正极端扰动频率fH/p.u. 0.997 9 0.999 7 1.001 6 负极端扰动频率fL/p.u. 0.996 0 0.996 0 0.996 0 正常状态系统网损J/p.u. 0.079 1 0.079 8 0.081 3
下载: 导出CSV
表 4 微电网频率和网损的蒙特卡洛仿真结果
结果 方案 均值 标准差 最大值 最小值 越限概率/% f/p.u 1 0.997 0 6.68×10-4 0.999 5 0.994 4 7.29 2 0.997 9 6.65×10-4 1.000 6 0.995 5 0.21 3 0.998 9 6.78×10-4 1.001 5 0.996 5 0 J/p.u. 1 0.079 0 0.007 6 0.111 8 0.054 6 - 2 0.079 7 0.007 7 0.110 2 0.051 2 - 3 0.081 2 0.007 9 0.112 3 0.054 2 -
下载: 导出CSV
表 5 不同风机控制方法下各微电源功率正常状态的优化值
DG 相别 情景1 情景2 有功 无功 有功 无功 1 a 1.619 9 0.969 4 1.208 2 0.696 1 b 0.456 9 0.271 7 0.803 0 0.493 3 c 0.874 0 0.533 4 0.941 9 0.583 5 2 a 0.669 1 0.356 7 0.669 7 0.355 6 b 0.400 1 0.217 1 0.400 7 0.216 1 c 0.488 8 0.255 2 0.489 4 0.254 2 3 a 0.990 3 0.489 4 0.815 6 0.383 7 b 0.459 0 0.174 6 0.599 5 0.257 8 c 0.663 9 0.294 4 0.685 8 0.313 7 4 a 0.290 6 0.267 9 0.602 5 0.408 6 b 0.295 6 0.275 4 0.028 2 0.164 2 c 0.293 8 0.272 6 0.249 3 0.243 0 5 a 0.290 3 0.268 9 0.544 8 0.490 5 b 0.295 9 0.274 4 0.085 3 0.089 6 c 0.293 8 0.272 5 0.249 9 0.235 8 正常状态系统网损J/p.u. 0.081 3 0.070 6
下载: 导出CSV
-
[1] 毕大强, 范柱烽, 解东光, 等.海岛光储直流微电网自治控制策略[J].电网技术, 2015, 39(4):886-891. http://d.old.wanfangdata.com.cn/Periodical/dwjs201504002 BI Da-qiang, FAN Zhu-feng, XIE Dong-guang, et al. Autonomous control strategy of island dc microgrid with photovoltaic and storage system[J]. Power System Technology, 2015, 39(4):886-891. http://d.old.wanfangdata.com.cn/Periodical/dwjs201504002 [2] 于雷, 汤庆峰, 张建华.基于负荷资源分类建模和启发式策略的家居型微电网优化运行[J].电网技术, 2015, 39(8):2180-2187. http://d.old.wanfangdata.com.cn/Periodical/dwjs201508018 YU Lei, TANG Qing-feng, ZHANG Jian-hua. Optimal operation for residential micro-grids based on load resources classification modelling and heuristic strategy[J]. Power System Technology, 2015, 39(8):2180-2187. http://d.old.wanfangdata.com.cn/Periodical/dwjs201508018 [3] 袁修广, 黄纯, 张磊, 等.计及微网孤岛运行方式的配电网可靠性评估[J].电网技术, 2015, 39(3):690-697. http://d.old.wanfangdata.com.cn/Periodical/dwjs201503016 YUAN Xiu-guang, HUANG Chun, ZHANG Lei, et al. Reliability evaluation of distribution network considering islanded operation of microgrid[J]. Power System Technology, 2015, 39(3):690-697. http://d.old.wanfangdata.com.cn/Periodical/dwjs201503016 [4] HWANG P, MOON S, AHN S. A vector-controlled distributed generator model for a power flow based on a three-phase current injection method[J]. Energies, 2013, 6(8):4269-4287. doi: 10.3390/en6084269 [5] 巨云涛, 吴文传, 张伯明, 等.分布式电源三相稳态模型[J].中国电机工程学报, 2014, 34(10):1509-1518. http://d.old.wanfangdata.com.cn/Periodical/zgdjgcxb201410001 JU Yun-tao, WU Wen-chuan, ZHANG Bo-ming, et al. Three-phase steady-state models for distributed Generators[J]. Proceedings of the CSEE, 2014, 34(10):1509-1518. http://d.old.wanfangdata.com.cn/Periodical/zgdjgcxb201410001 [6] ABDELAZIZ M M A, FARAG H E, EL-SAADANY E F, et al. A novel and generalized three-phase power flow algorithm for islanded microgrids using a newton trust region method[J]. IEEE Transactions on Power Systems, 2013, 28(1):190-201. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=9d7d76f6a3ee72614a818f2f9d1f1ac1 [7] DALL'ANESS E, HAO Z, GIANNAKIS G B. Distributed optimal power flow for smart microgrids[J]. IEEE Transactions on Smart Grid, 2013, 4(3):1464-1475. http://d.old.wanfangdata.com.cn/OAPaper/oai_arXiv.org_1211.5856 [8] RIVA S E, NGUYEN Q N, DI SILVESTRE M L, et al. Optimal power flow in three-phase islanded microgrids with inverter interfaced units[J]. Electric Power Systems Research, 2015, 123:48-56. doi: 10.1016/j.epsr.2015.01.020 [9] ABDELAZIZ M M A, EL-SAADANY E F. Maximum loadability consideration in droop-controlled islanded microgrids optimal power flow[J]. Electric Power Systems Research, 2014, 106:168-179. doi: 10.1016/j.epsr.2013.08.020 [10] 周竞, 王珂, 石飞, 等.计及源荷双侧响应的概率潮流计算方法[J].电力自动化设备, 2016, 36(8):76-81, 89. http://d.old.wanfangdata.com.cn/Periodical/dlzdhsb201608012 ZHOU Jing, WANG Ke, SHI Fei, et al. Probabilistic power flow algorithm considering source-side and load-side responses[J]. Electric Power Automation Equipment, 2016, 36(8):76-81, 89. http://d.old.wanfangdata.com.cn/Periodical/dlzdhsb201608012 [11] HWANG P, JANG G, MOON S, et al. Three-phase steady-state models for a distributed generator interfaced via a current-controlled voltage-source converter[J]. IEEE Transactions on Smart Grid, 2016, 7(3):1694-1702. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=55e70f8569c1e6a1a64be38b99e920a0 [12] DE BRABANDERE K, BOLSENS B, VAN DEN K J, et al. A voltage and frequency droop control method for parallel inverters[J]. IEEE Transactions on Power Electronics, 2007, 22(4):1107-1115. doi: 10.1109/TPEL.2007.900456 [13] SINGH S, GOEL N, KUMAR P. A novel approach for reactive power output optimization in wind farm for the reduction of distribution losses using genetic algorithm[J]. Electronics and Instrumentation Engineering, 2013, 2(3):1053-1059. http://d.old.wanfangdata.com.cn/OAPaper/oai_doaj-articles_9dd48200a88c3524d066a6ce8b7a0a9a [14] 车仁飞, 李仁俊.一种少环配电网三相潮流计算新方法[J].中国电机工程学报, 2003, 23(1):74-79. doi: 10.3321/j.issn:0258-8013.2003.01.016 CHE Ren-fei, LI Ren-jun. A new three-phase power flow method for weakly meshed distribution systems[J]. Proceedings of the CSEE, 2003, 23(1):74-79. doi: 10.3321/j.issn:0258-8013.2003.01.016 [15] 王聪, 颜伟, 赵霞, 等.考虑逆变电源控制模式的微电网三相潮流模型[J].中国电机工程学报, 2015, 35(12):2960-2967. http://d.old.wanfangdata.com.cn/Periodical/zgdjgcxb201512006 WANG Cong, YAN Wei, ZHAO Xia, et al. Three-phase power flow model for microgrid considering inverter control modes[J]. Proceedings of the CSEE, 2015, 35(12):2960-2967. http://d.old.wanfangdata.com.cn/Periodical/zgdjgcxb201512006 [16] YAN W, YU J, YU D C, et al. A new optimal reactive power flow model in rectangular form and its solution by predictor corrector primal dual interior point method[J]. IEEE Transactions on Power Systems, 2006, 21(1):61-67. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=41aa53860cb74332fcf56f88d9b846ef -

 点击查看大图
点击查看大图
图(1) / 表(5)
计量
- 文章访问数: 3898
- HTML全文浏览量: 1204
- PDF下载量: 79
- 被引次数: 0
