 ISSN
ISSN 


 下载:
下载:
-
物联网应用的一个关键参数是传感器设备的位置信息,这些位置信息可以通过各种定位系统获取。全球定位系统(global position system, GPS)[1]在室外的视距(line of sight, LoS)传输条件下可以获得米级定位精度,而室内环境由于多径效应和非视距传输条件的影响[2]导致室内定位系统(indoor position system, IPS)面临很多技术挑战。
近年来,无线室内定位已成为一个热门的研究对象。很多人开始集中研究结合两种及以上技术的混合定位系统,以提高位置估计的精度[3-5]。在传感器辅助方面,也有许多融合定位的研究。针对AP指纹的高动态性、波动性等问题,文献[6]提出了基于众包数据的定位模型更新方法,减少了数据采集负担;文献[7]研究了基于众包技术的室内定位关键技术;文献[8-9]提出把地磁场和惯性传感器信息进行序贯融合的室内定位方法;文献[10]提出利用卡尔曼滤波将GPS、基站及惯性传感器的信息进行融合的移动定位方案;文献[11]提出将行人航位推算和地磁引力进行结合的室内定位算法。
在商场,超市与仓储物流等室内环境中,超宽带(UWB)技术已经能够实现精确测距,并通过三边定位方法实现位置估计。然而实际应用中,定位精度会受建筑物遮挡和布站密度影响,部分UWB基站的距离测量是无效的,若要满足实时定位的需求,则需在每个房间都要布置3个以上的测距基站,布站密度很高。针对上述问题,本文提出一种融合UWB精确测距与RSSI测量的定位方法。本方法通过对数正态模型,将无线网络(wireless LAN, WLAN)测量中的RSSI转换为距离信息,通过构建距离差的代价函数,结合一个UWB基站的精确测距信息,利用搜索方法,达到了仅需两个无线网络基站及一个UWB基站便可精确定位的效果。所提算法与三边测量定位中的最大似然估计算法和最小二乘估计算法做了对比,算法的定位精度在任意网络环境下均优于最小二乘估计算法,且与基于迭代搜索的最大似然估计算法具有相似的定位精度,定位时间大大缩短。所提方法在提供了较高定位精度的同时,还能摆脱传统三边测量算法必须基于3个以上定位基站测量距离信息的限制,具有广泛的应用前景。
-
现有的融合定位技术大部分以RSSI测量为主,按照数学方法大致可以分为3类。第一类是多算法融合,即融合多种定位算法的结果,其测量可以来自于同构网络环境下的单一数据源,也可以来自异构网络下的多种数据源;第二类是多数据融合,即融合多种数据测量,通过统一的算法求解定位结果,其测量来源于不同的传感器或不同的无线接入技术;第三类是利用嵌入的传感器来辅助定位,以提供更佳的性能,例如加速度计、陀螺仪和磁力计。对于第一类,定位性能的提升依赖于融合不同的定位算法。对于后两类而言,是通过利用额外的无线技术或传感器信息来提高定位性能,本文属于第二类融合。
-
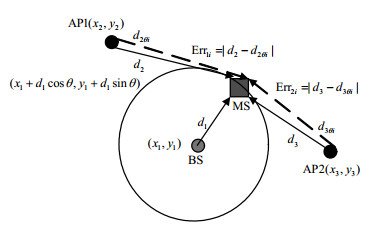
在无线局域网(WLAN)中加入精准测距基站(base station, BS),这种BS可以基于超宽带测距技术或相位测距技术等。在BS位置$({x_1},{y_1})$已知情况下,以BS为圆心,测得与移动站(mobile station, MS)距离${d_1}$为半径画圆,便可将估计的MS坐标定位于圆上,圆上各点坐标$({x_{Mi}},{y_{Mi}})$表示为:
$$\left\{ \begin{gathered} {x_{Mi}} = {x_1} + {d_1}\cos (i\theta ) \\ {y_{Mi}} = {y_1} + {d_1}\sin (i\theta ) \\ \end{gathered} \right.$$ (1) 式中,$i = 1,2, \cdots ,N$;$\theta $是角位移的单位转动量,$\theta = 2\pi /N$。
同时,WLAN网络中的各个接入点(access point, AP)还会扫描到MS的发射信号强度,产生对应MS的RSSI值,通过对数正态模型,在RSSI估计中测量值${P_{ij}}$是节点$i$接收到由节点$j$发出的信号强度,其对数形式${P_{ij}}({\rm{dBm}}) = 10{\log _{10}}{P_{ij}}$服从高斯正态分布:
$$P_{i j}(\mathrm{dBm}) \sim N\left({\mathit{\overline P} _{ij}}(\mathrm{dBm}), \sigma_{\mathrm{dB}}^{2}\right)$$ (2) 其中均值${\bar P_{ij}}$可以表示为:
$$\overline{P}_{i j}(\mathrm{dBm})=P_{0}(\mathrm{dBm})-10 \beta \log _{10}\left(d_{i j} / d_{0}\right)$$ (3) ${P_0}({\rm{dBm}})$是参考距离${d_0}$的接收信号强度分贝,可以根据自由空间路径损耗模型(free space path loss formula)[12]计算得到,一般情况下${d_0} = 1\;{\rm{m}}$。路径损耗系数$\beta $是环境的函数,大部分情况下将其定义为已知量,而在某些问题中也可以将其作为未知量处理。节点$i$接收到由节点$j$发出的信号强度测量值${p_{ij}}$的概率密度函数可以表示为[13]:
$$P_{i j}\left(P_{i j} ; \gamma_{i}, \gamma_{j}\right)=\frac{10 / \log 10}{\sqrt{2 \pi \sigma_{\mathrm{dB}}^{2}}} \frac{1}{P_{i j}} \exp \left[-\frac{b}{8}\left(\log \frac{d_{i j}^{2}}{\tilde{d}_{i j}^{2}}\right)^{2}\right]$$ (4) 式中,
$$b = {\left( {\frac{{10\beta }}{{{\sigma _{{\rm{dB}}}}\log 10}}} \right)^2}$$ (5) $$\tilde{d}_{i j}=d_{0}\left(p_{0} / p_{i j}\right)^{1 / \beta}$$ (6) ${\tilde d_{ij}}$是在给定接收信号强度${p_{ij}}$时,距离${d_{ij}}$的最大似然估计值。最终生成各个AP与MS的距离估计。算法中,选取RSSI值最强的两个AP与MS的距离估计值并以${d_2},{d_3}$表示,从而尽量避免多径、阻挡等因素使对数正态信道模型无法刻画实际信道的情况[14-15]。
-
在实际定位过程中,算法首先计算所画圆上各点与两个AP的距离:
$$\left\{ \begin{gathered} {d_{2\theta i}} = \sqrt {{{\left( {{x_{Mi}} - {x_2}} \right)}^2} + {{\left( {{y_{Mi}} - {y_2}} \right)}^2}} \\ {d_{3\theta i}} = \sqrt {{{\left( {{x_{Mi}} - {x_3}} \right)}^2} + {{\left( {{y_{Mi}} - {y_3}} \right)}^2}} \\ \end{gathered} \right.$$ (7) 并与距离估计做差:
$$\left\{ \begin{gathered} {\rm{Er}}{{\rm{r}}_{1i}} = |{d_2} - {d_{2\theta i}}| \\ {\rm{Er}}{{\rm{r}}_{2i}} = |{d_3} - {d_{3\theta i}}| \\ \end{gathered} \right.$$ (8) 代价函数最终表示为:
$$\mathop {{\rm{Min}}}\limits_i \sqrt{\operatorname{Err}_{1 i}^{2}+\operatorname{Err}_{2 i}^{2}}$$ (9) 搜索整个圆上的代价函数,选取代价函数最小值对应的MS坐标值,作为MS的位置估计值。定位原理如图 1所示。

图 1 代价函数搜索算法图示
本文算法同样适用于全RSSI测量的定位系统,在此情况下,由式(6)可算出${d_1}$。
-
本文分别在1~3个精确测距基站参与的情况下对定位结果进行了仿真,仿真引入最小二乘(least square, LS)算法作为第一种对比算法,LS在线性方程组条件下可求得最小方差无偏(minimum variance unbiased, MVU)估计量。仿真其次引入MS坐标的最大似然(maximum likelyhood, ML)估计量,并利用最速梯度下降法(The gradient descent method),以迭代搜索的方式求得MS位置。每次实验结果都是1 000次仿真取平均值得到的。
仿真环境为一个$10{\rm{ m}} \times 10{\rm{ m}}$的区域,铺设有4个AP(能同时测量RSSI及精确距离),它们的坐标为$(0,0),(10,0)(0,10),(10,10)$,标号为1~4号,坐标单位m。仿真中给精确测距值加入了标准差为0.2 m的高斯白噪声,用以描述精准测距的误差。式(6)的路径损耗系数$\beta $根据经验值判断为3。
-
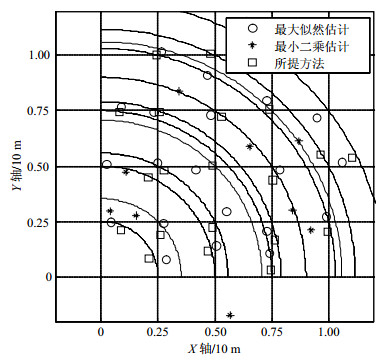
假设MS与1号AP的精确测距有效,则1号AP即为BS,且测量的距离即为图 1的距离${d_1}$,与2号和3号AP的通信未受室内环境严重干扰,在服从式(2)的分布条件下,RSSI分布的标准差是3 dBm。而与4号AP的通信信号质量较差,RSSI分布的标准差是9 dBm。所提算法自然选择2号、3号AP的RSSI作为计算依据。如图 2所示,虚线的交点处代表各点MS的真实坐标,并以BS坐标为圆心,各MS点与BS距离加入噪声为半径做弧线。观测图 2可以发现,所提算法在部分AP信号受噪声干扰较大情况下,与ML算法结合迭代搜索估计有相似的定位性能,而LS算法的定位结果则较差。

图 2 (10 m正方形)区域定位仿真图
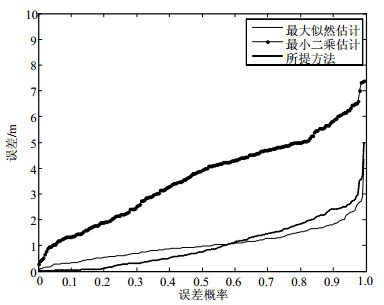
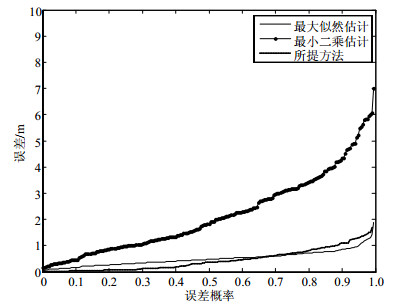
图 3为1 000次运行结果的累积误差分布曲线图,从图 3中可以得到与图 2相同的结论,所提算法与ML算法的定位误差以60%的概率小于1 m左右,而LS算法的定位误差明显大于ML和所提算法。

图 3 单个BS定位的误差累积图
同时,观察表 1可以发现ML估计在1 000次运行的平均时间是126.58 s,LS估计在1 000次运行的平均时间是5.25 s,所提算法在1 000次运行的平均时间是49.93 s,在计算时间上所提算法与具有相似定位精度的ML估计相比,降低了近60%。
表 1 算法运行时间比较
算法 1 000次平均运行时间/s ML算法 126.58 LS算法 5.25 所提算法 49.93 -
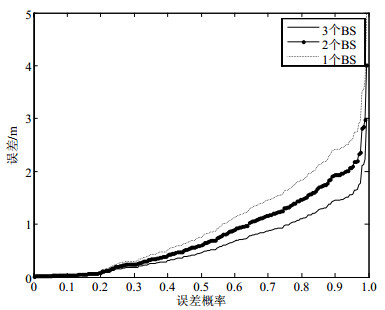
在2.1的仿真实验基础上,逐步增加精准测距基站数量,从1个增加到3个,从图 4可以发现,定位精度也随之增加。

图 4 精准测距基站数与定位误差关系
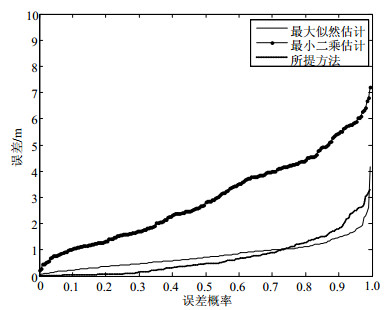
图 5仿真了精确测量基站数为2个的定位情况,图 6是精确测量基站数为3个的定位误差累积曲线。从两幅图可以看出,在任意网络环境中所提算法的定位精度均优于LS算法,且定位误差在精确测距数量少于3个即环境恶劣的情况下定位精度均大概率优于ML算法,且计算耗时要少,在3个精确测距基站情况下,所提算法的定位性能大概率优于ML估计。

图 5 两个BS定位的误差累积图

图 6 3个BS定位的误差累积图
-
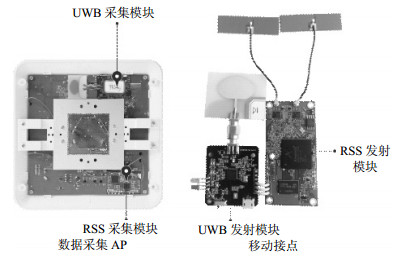
实际测试中,本方法采用了一种同时具有UWB测距模块及RSSI采集模块的AP进行真实的数据采集,完成真实环境的定位结果测试。AP如图 7所示。

图 7 定位数据采集设备
在实际环境中,由于UWB容易受到室内物体如墙壁等的遮挡而无法测距,所以第2节描述的算法面对的极限情况是没有任何一个基站可以进行精确距离测量,此时变为完全依赖RSSI定位。
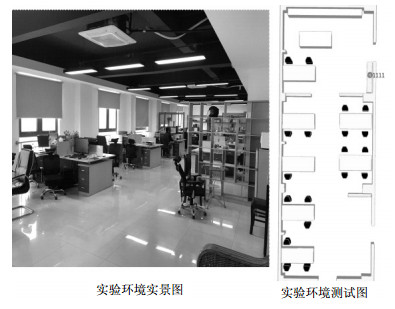
实测环境是一个$5{\rm{ m}} \times 20{\rm{ m}}$的长方形办公区域,首先在该区域中布设4个AP,坐标分别为(0, 0), (5, 0), (5, 20)和(0, 20),实际环境如图 8所示。

图 8 实测环境图示
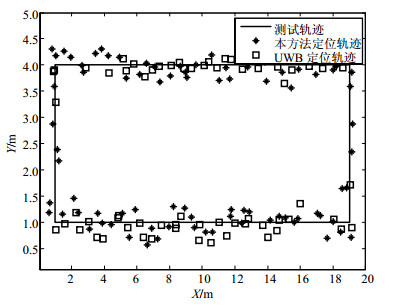
测试人员手持两个模块在环境中沿中间过道来回行走,如图 9所示。仅依靠UWB定位,可以发现当走到过道两端时,UWB的定位会出现丢失的情况,使得整条轨迹不连贯。这是因为这些位置离远端的两个AP测量距离较远,并有信号遮挡的情况发生。采用本文方法的定位轨迹,在UWB定位出现丢失的地方,本文方法有效地对定位结果进行了补充,使得整条轨迹连贯,提高了定位实时性。

图 9 实测定位结果
-
本文从多种测量融合出发,提出了一种基于RSSI辅助的精确测距混合定位算法。算法通过对数正态模型,将无线网络测量中的接收信号的强度信息转换为距离信息,通过构建距离差的代价函数,利用搜索方法,达到了仅需一个距离精确测量基站配合两个普通通信基站便可精确定位的效果。在后续的研究中,对于对数正态模型的修正可以进一步考虑衰减系数或是采用混合信道模型。
A Hybrid Localization Algorithm Based on RSSI Assisted Precise Distance Measurement
-
摘要: 针对传统的超宽带(UWB)室内定位方法中,UWB信号极易被遮挡,满足不了3个以上有效测距信息,导致无法精确定位的问题,提出了一种基于接收信号强度(RSSI)辅助的精确测距混合定位算法。该算法通过对数正态模型,将无线网络(wireless LAN,WLAN)中测量的RSSI转换为距离信息,通过构建距离差的代价函数,结合单个UWB基站的精确测距,利用搜索方法,实现了在多个RSSI测量值辅助下,一个UWB测距基站便可完成精确定位。该算法与三边测量定位中的最小二乘估计算法和最大似然估计算法对比,定位精度在任意网络环境下均优于最小二乘估计算法,且在定位精度相似的情况下,计算量远少于最大似然估计算法。Abstract: In ultra-wideband (UWB)-based indoor positioning, the number of base stations used for location calculating is always affected by non-line-of-sight (NLOS) propagation or sheltering, and thus leading to no solution of location equations. This paper proposes a precise indoor localization algorithm based on received signal strength indicator (RSSI) and UWB ranging techniques. The multiple RSSI measurements of wireless local area network (WLAN) is transformed into the corresponding distances, which can be used to improve the positioning accuracy of the UWB. Our technique can localize targets by minimizing the positioning errors with only one UWB base station. Compared with the existing least squares (LS) and maximization likelihood (ML) algorithms, our method achieves better performances in arbitrary structure of base stations with low computational complexity.
-
Key words:
- hybrid location /
- indoor position /
- lognormal model /
- low density station distribution /
- trilateration
-
[1] HOFMANN B, WELLINHOF H, LICHTENEGGER H. GPS:theory and practice[M]. Vienna:Springer-Verlag, 1997. [2] LADD A M, BEKRIS K E, RUDYS A P, et al. On the feasibility of using wireless ethernet for indoor localization[J]. Robotics & Automation IEEE Transactions on, 2004, 20(3):555-559. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=3f7af2a4219628977456f6b9c5b8ba1b [3] BAHL P, PADMANABHAN V N. Radar: an in-building RF based user location and tracking system[C]//Proc IEEE Infocom.[S.l.]: IEEE, 2000, 2: 775-784. [4] KOLODZIEJ K W, HJELM J. Local positioning systems: LBS applications and services[M].[S.l.]: CRC press, 2006: 101-158. [5] PRIYANTHA N, CHAKRABORTY A, BALAKRISHNAN H. The Cricket location-support system[C]//International Conference on Mobile Computing and Networking.[S.l.]: ACM, 2000: 32-43. [6] 黄正宇, 陈益强, 刘军发, 等.基于众包数据的室内定位方法和平台[J].地球信息科学学报, 2016, 18(11):1476-1484. http://d.old.wanfangdata.com.cn/Periodical/dqxxkx201611005 HUANG Zheng-yu, CHEN Yi-qiang, LIU Jun-fa, et al. Indoor localization method and platform based on crowdsourcingdata[J]. Journal of Geo-information Science, 2016, 18(11):1476-1784. http://d.old.wanfangdata.com.cn/Periodical/dqxxkx201611005 [7] 黄正勇.基于众包的室内定位关键技术研究[D].上海: 上海交通大学, 2015. http://cdmd.cnki.com.cn/Article/CDMD-10248-1015806755.htm HUANG Zheng-yong. Research on key technologies of crowdsourcing-based indoor localization system[D]. Shanghai: Shanghai Jiao Tong University, 2015. http://cdmd.cnki.com.cn/Article/CDMD-10248-1015806755.htm [8] 郭伟龙.融合多源信息的室内定位算法研究[D].杭州: 浙江大学, 2016. GUO Wei-long. Research on indoor localization based on fusion of multi-source information[D]. Hangzhou: Zhejiang University, 2016. [9] 周启臻, 邢建春, 李决龙, 等.一种多元信息融合的室内定位方法[J].微型机与应用, 2016, 35(22):72-76. http://d.old.wanfangdata.com.cn/Periodical/wxjyyy201622020 ZHOU Qi-zhen, XING Jian-chun, LI Jue-long, et al. An indoor localization method based on multi-data fusion[J]. Microcomputer & Its Applications, 2016, 35(22):72-76. http://d.old.wanfangdata.com.cn/Periodical/wxjyyy201622020 [10] 张科.基于多源信息融合的移动定位优化技术研究[D].北京: 北京邮电大学, 2013. http://cdmd.cnki.com.cn/Article/CDMD-10013-1013241449.htm ZHANG Ke. Research on mobile positioning optimization technology based on multi-source information fusion[D]. Beijing: Beijing University of Posts and Telecommunications, 2013. http://cdmd.cnki.com.cn/Article/CDMD-10013-1013241449.htm [11] 黄承恺.多传感器信息融合算法在室内定位中的应用[D].北京: 北京邮电大学, 2015. http://cdmd.cnki.com.cn/Article/CDMD-10013-1015584230.htm HUANG Cheng-kai. The application of multi-sensor information fusion algorithm for indoor positioning system[D]. Beijing: Beijing University of Posts and Telecommunications, 2015. http://cdmd.cnki.com.cn/Article/CDMD-10013-1015584230.htm [12] RAPPAPORT S T. Wireless communications: Principles and practice[M].[S.l.]: Prentice Hall, 2001. [13] PATWARI N, PERKINS M, CORREAL N S, et al. Relative location estimation in wireless sensor networks[J]. IEEE Transactions on Signal Processing, 2015, 51(8):2137-2148. http://cn.bing.com/academic/profile?id=b51fa4d50f5e5b33c6b1cb6d2b27e6b6&encoded=0&v=paper_preview&mkt=zh-cn [14] LUO R C, CHEN O, LIN P H. Indoor robot/human localization using dynamic triangulation and wireless Pyroelectric Infrared sensory fusion approaches[C]//IEEE International Conference on Robotics and Automation.[S.l.]: IEEE, 2012: 1359-1364. [15] YOON C, CHA H. Experimental analysis of IEEE 802.15.4a CSS ranging and its implications[J]. Computer Communications, 2011, 34(11):1361-1374. doi: 10.1016/j.comcom.2011.02.002 -

 点击查看大图
点击查看大图
图(9) / 表(1)
计量
- 文章访问数: 4481
- HTML全文浏览量: 1243
- PDF下载量: 134
- 被引次数: 0
