 ISSN
ISSN 


 下载:
下载:

-
目前,对于空间中光强或者电磁波的追踪常用的方式是采用光电传感器判别方向,并控制追踪系统进行追踪。以对太阳光追踪为例[1-4],常见的有重力式、电磁式和电动式,这些光电跟踪装置都使用光敏传感器如硅光电管,其传统的追踪系统控制策略有很大的改进空间。
-
以视日追踪装置为例[5-9],传统的追踪系统控制策略,光电管的安装靠近遮光板,调整遮光板的位置使遮光板对准太阳、硅光电管刚好被阳光照射;当太阳西移时遮光板的阴影偏移,光电管输出电压减小,作为偏差信号,经放大电路放大,经控制器采集后由伺服机构调整角度使跟踪装置对准太阳完成跟踪。
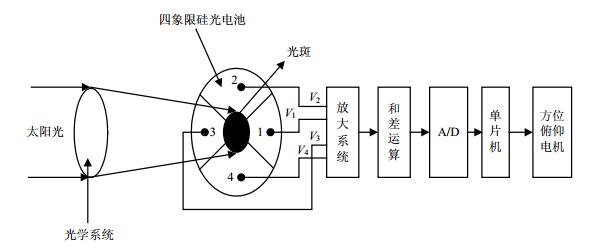
为保障精度,光电传感器通常采用四象限位置传感器来完成[10]。四象限位置传感器内部采用4块光电池按矩形排列,每块光电池受光照能独立输出电压值,通过外接简易光学系统,让光源投影到阵列上,比较每块光电池电压就可得到光源角度。其原理如图 1所示。方案中传感器与执行机构独立,处理器不断从传感器获取光源信息,也不断从执行机构获取其角度信息,通过运算得到相应的控制信号。从原理图可以看出,控制四象限传感器,需要单片机能够实时进行4路AD采样,通常的单片机都不能提供4路AD,所以传统的追踪控制策略在硬件上的开销颇大。

图 1 四象限位置传感器及其原理
-
还是以视日追踪装置为例,选择性能熟悉、成本低的光敏电阻作为光电传感器。其工作原理是基于内光电效应,在半导体光敏材料两端装上电极引线,将其封装在带有透明窗的管壳里构成光敏电阻。
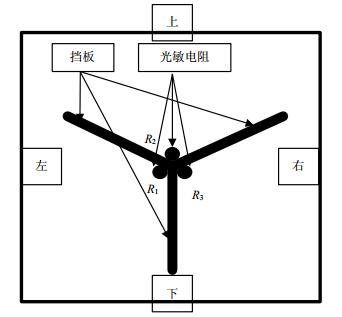
追踪机构如图 2所示,3只光敏电阻以正三角排列,它们之间由3块夹角为120°的挡板分隔,3只光敏电阻处于挡板根部,称其为三象限位置传感器。

图 2 三象限位置传感器
通过改进,控制系统需要采集的模拟量由原先的4个变成了3个,通过3个电阻反馈的电压差值,可算出光源的相对位置,进而控制机械机构进行追踪。
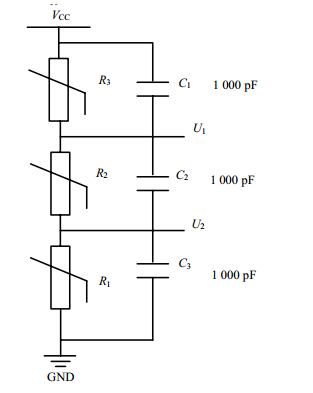
三象限传感器电路设计采用3个光敏电阻串联,如图 3所示。当测得U1和U2后,可算出3只光敏电阻的分压,进而得到每只光敏电阻的相对受光情况,从而得到光源的偏差方向,完成测向功能。

图 3 三象限传感器电路设计
光敏电阻内部电阻随光照射而变化,光度越强阻值越小(负光敏电阻)。将输出电压U1、U2分别送到处理器的ADC通道0和通道1进行采样,计算出光源偏离方向。图 4是光源从不同方位入射时的传感器照射情况。

图 4 测向原理示意图
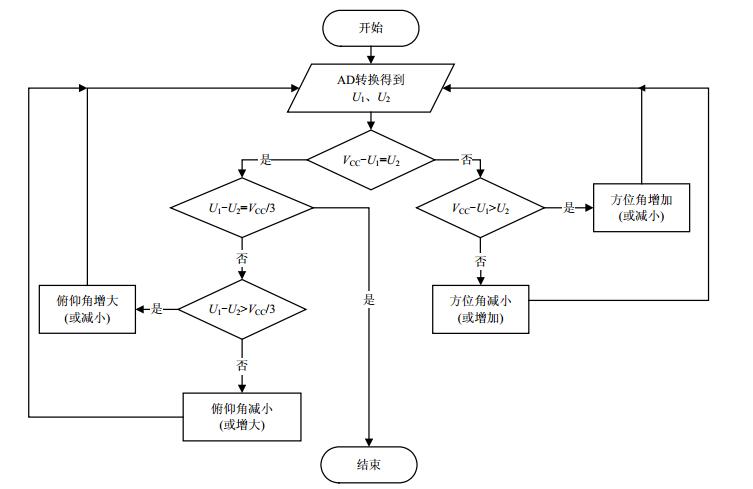
当太阳光按图 4a所示方向入射时,${R_3}$受光照最强,其电阻最小,分压最低,对应${U_{{R_3}}}$最小;当太阳光按图 4b所示方向入射时,${R_1}$受光照最强,其电阻最小,分压最低,对应${U_{{R_1}}}$最小;当太阳光按图 4c所示方向入射时,${R_1}$、${R_3}$受等量光照,其电阻相同,分压相等,${U_{{R_1}}} = {U_{{R_3}}}$,此时追踪系统在水平方位上对准太阳。追踪系统垂直仰角的调整通过判断${U_1} - {U_2}$是否大于${V_{CC}}/3$来进行:
$$ \left\{ {\begin{array}{*{20}{l}} {{V_{CC}} - {U_1} > {U_2}\;\;\;\;\;{R_3}光照强, {R_1}光照弱, 光源偏右}\\ {{V_{CC}} - {U_1} < {U_2}\;\;\;\;\;{R_3}光照弱, {R_1}光照强, 光源偏左} \end{array}} \right. $$ $$ \left\{ {\begin{array}{*{20}{l}} {{U_1} - {U_2} > \frac{1}{3}{V_{CC}}\;\;\;\;\;{R_2}光照弱, 光源偏下}\\ {{U_1} - {U_2} < \frac{1}{3}{V_{CC}}\;\;\;\;\;{R_2}光照强, 光源偏上} \end{array}} \right. $$ 可得对应跟踪算法如图 5所示。

图 5 跟踪算法
这样设计的目的是利用差分效果,当其中的某只电阻的阻值变化(光照变化)时,其余电阻即使光照未变化,它们的分压也会进行互补性改变,这样就提高了U1、U2的动态输出范围,进一步改善跟踪精度。而且电阻没有固定,光照强度适应能力好,使用器件少,控制系统需要采集的模拟量也由改进后的3个进一步优化成了2个,实现了硬件简化。
-
对于视日运动,为了能动态跟踪太阳高度和赤纬角的变化,一般采用双轴跟踪。双轴跟踪将追踪动作分解为方位角追踪和俯仰角追踪,如图 6所示。

图 6 双轴追踪示意图
追踪执行机构选择舵机。舵机控制较为简单(部分串口舵机除外),其引线有3条:电源线、地线、控制线。使用电源一般为4.8~6 V,也有一些高压舵机,采用十几伏的电源。控制上采用脉宽调制(PWM)信号,周期一般在20 ms以内,脉冲宽度在0.5~2.5 ms内,对应0~180°。舵机角度与其控制信号一一对应,可以直接从控制信号得到舵机角度。这一点在应用时十分方便,处理器产生信号控制舵机,无需其他传感器,就可以根据发出的信号得到目前舵机的角度。
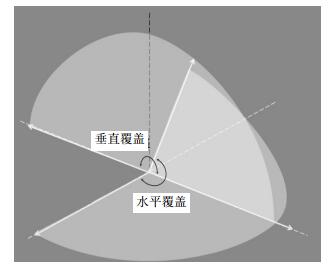
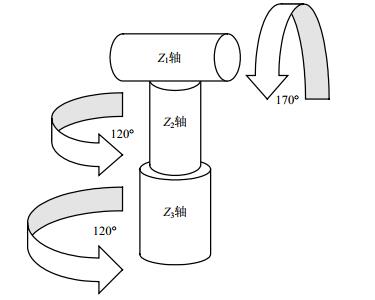
基于舵机的特点,在执行机构中采用舵机搭建二自由度云台,控制测向头的方位角和俯仰角,完成半球范围的光源跟踪。如图 7所示。

图 7 追踪执行机构示意图
该执行机构由三舵机驱动,一个负责Z1轴的俯仰驱动,角度范围170°;另外两个分别负责Z2轴和Z3轴的方位驱动,因为单舵机的可控角度小于180°,为达到半球覆盖效果,在方位上采用两舵机角度叠加的方式来实现方位无死角覆盖。
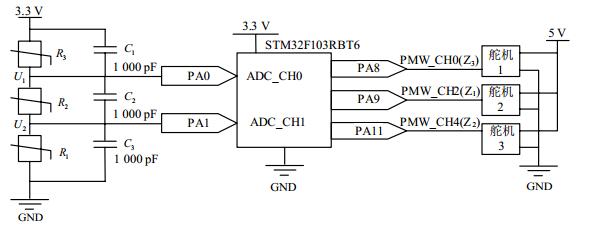
整个系统由一块STM32处理器、3只光敏电阻构成的测向头、3个舵机驱动的云台组成,硬件原理图如图 8所示。处理器从PA0和PA1以VCC为参考采样U1和U2,经过运算,分别从PA8、PA9、PA11输出PWM信号驱动追踪执行机构。

图 8 系统原理图
对系统进行功能测试。接通电源,测向板回到初始位置,之后开始追踪光源,几秒后,测向板稳定的朝向光源所在角度,光源角度变化时,也能在几秒内锁定光源所在角度,极限角度切换后也能稳定锁定光源。设计达到预期目的。
-
通过对视日追踪装置的控制策略改进,发现使用三象限阴影法测向,利用差分效果将需采集的模拟量减少到2个,可以实现全空域的追踪。相比原有的控制策略,控制逻辑更为简单,AD采样通道减少,硬件结构更为精简,实时性和可靠性也能得到保证。综上所述,基于光电传感器的三象限阴影法视日追踪系统可替代现有的四象限位置传感器视日追踪系统,同时降低了硬件成本和控制难度。而通过更换末端传感器,此改进的控制策略还可用于空间中电磁波源的追踪,无论在军事还是民用领域均有较大的应用价值。
Improvement of Control Strategy of Tracking System Based on Photoelectric Sensor
-
摘要: 该文提出了一种基于光电传感器的追踪系统控制策略改进方法。以视日追踪系统为例,使用新的三象限位置传感器替代原有四象限传感器测向,降低了系统成本及控制难度。利用差分效果将需采集的模拟量减少到两个,分别对应水平和俯仰两个维度的控制,相比原有的控制策略,控制逻辑更为简单,实时性和可靠性也可以保证。测试表明,该系统能实现在全空域范围内的点光源跟踪,可替代现有四象限视日追踪系统。通过更换末端传感器,此改进的控制策略还可用于空间中电磁波源的追踪,无论在军事领域还是民用领域均有极大的应用价值。Abstract: This paper presents an improved control strategy for tracking system based on photoelectric sensors. Taking the sun-tracking system as an example, the new three-quadrant position sensor is used to replace the original four-quadrant sensor for finding directions, which reduces the system cost and difficulties of controlling. The improved system control strategy uses the differential effect to reduce the analog quantities to two, corresponding respectively to the two-dimension control of the horizontal and vertical directions. Compared with the original control strategy, the proposed control logic is simpler, thus the real time and reliability can also be guaranteed. Tests explain that the system can realize the tracking of the point light source in the whole airspace and replace the existing four-quadrant sun-tracking system. By replacing the terminal sensor, the improved control strategy can also be used to track electromagnetic wave sources in space, which has great application value in both military and civil fields.
-
[1] LI T H, XIANG D Q. Research and design of photoelectric solar tracking system[J]. Advanced Engineering Forum, 2012, 4:115-120. doi: 10.4028/www.scientific.net/AEF.4 [2] HASSAN F. Novel high accurate sensorless dual-axis solar tracking system controlled by maximum power point tracking unit of photovoltaic systems[J]. Applied Energy, 2016, 173:448-459. doi: 10.1016/j.apenergy.2016.03.109 [3] 刘路路, 黄祥康, 邱选兵, 等.基于ARM的太阳跟踪控制系统设计[J].电子科技, 2013, 26(6):10-13. doi: 10.3969/j.issn.1007-7820.2013.06.004 LIU Lu-lu, HUANG Xiang-kang, QIU Xuan-bing, et al. Design of a solar tracking control system based on ARM[J]. Electronic Science and Technology, 2013, 26(6):10-13. doi: 10.3969/j.issn.1007-7820.2013.06.004 [4] 金晶晶.太阳光线自动跟踪装置[D].沈阳: 沈阳工业大学, 2007. http://cdmd.cnki.com.cn/Article/CDMD-10142-2007123283.htm JIN Jing-jing. Solar beam automatic tracking equipment[D]. Shenyang: Shenyang University of Technology, 2007. http://cdmd.cnki.com.cn/Article/CDMD-10142-2007123283.htm [5] 凌好, 刘荣忠, 郭锐, 等.基于ARM的太阳跟踪系统设计[J].计算机测量与控制, 2012, 20(2):383-385. http://d.old.wanfangdata.com.cn/Periodical/jsjzdclykz200906028 LIN Hao, LIU Rong-zhong, GUO Rui, et al. Design of STM32-based automatic solar tracking control system[J]. Computer Measurement & Control, 2012, 20(2):383-385. http://d.old.wanfangdata.com.cn/Periodical/jsjzdclykz200906028 [6] 耿晓强, 唐向红, 刘国凯, 等.基于光敏电阻阵列的太阳自动跟踪系统设计[J].单片机与嵌入式系统应用, 2017, 17(2):31-34. http://d.old.wanfangdata.com.cn/Periodical/dpjyqrsxtyy201702010 GEN Xiao-qiang, TANG Xiang-hong, LIU Guo-kai, et al. Sun automatic tracking system design based on photosensitive resistor array[J]. Microcontrollers & Embedded Systems, 2017, 17(2):31-34. http://d.old.wanfangdata.com.cn/Periodical/dpjyqrsxtyy201702010 [7] JOSEPH J M. The Astronomical Almanac's algorithm for approximate solar position (1950-2050)[J]. Solar Energy, 1988, 40(3):227-235. [8] ANTIA H M, CHITRE S M, GOUGH D O. Temporal variations in the Sun's rotational kinetic energy[J]. Astronomy and Astrophysics, 2008, 477(2):657-663. doi: 10.1051/0004-6361:20078209 [9] TREBI-OLLENNU A, HUNTSBERGER T, CHENG Yang, et al. Design and analysis of a sun sensor for planetary rover absolute heading detection[J]. IEEE Journal of Robotics and Automation, 2001, 17(6):937-947. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=28bb6b8875edbe2886ad2fd54846762f [10] 谢漪, 谢翠婷, 叶创辉.一种四象限太阳跟踪控制系统设计[J].机电工程技术, 2017, 46(2):37-41. doi: 10.3969/j.issn.1009-9492.2017.02.010 XIE Yi, XIE Cui-ting, YE Chuang-hui. A design of four-quadrant solar tracking control system[J]. Mechanical and Electrical Engineering Technology, 2017, 46(2):37-41. doi: 10.3969/j.issn.1009-9492.2017.02.010 -

 点击查看大图
点击查看大图
图(8)
计量
- 文章访问数: 4271
- HTML全文浏览量: 1381
- PDF下载量: 98
- 被引次数: 0
