 ISSN
ISSN 


 下载:
下载:

-
宇航推进系统、全舰电力推动、电力机车牵引、电动/混合燃料汽车驱动等领域的发展,对多电机传动系统的重量、体积和成本提出了更加苛刻的要求[1]。多相电机相数冗余的特点使得满足一定串联规则的多相电机串联系统的解耦运行成为可能[2]。在单逆变器驱动的多台多相电机串联系统中,通过适当的解耦控制,可实现各电机的工作状态相互独立、互不影响。这种单逆变器驱动多电机串联的工作模式可以成套地节省外围的控制、驱动和检测电路,因而能够减小体积、节省成本。其中,由应用较广泛的五相电机、六相电机组成的串联系统具有更高的潜在应用价值[3-4]。
洛克希德·马丁公司最早提出单逆变器供电的多电机串联系统理论,并仿真实现了由两台五相感应电机组成的串联系统的解耦控制[5]。文献[6]将电机串联规则推广到N台电机串联,并总结了解耦变换矩阵的选取原则,最后,分别以两台十相感应电机和两台五相感应电机组成串联系统为例,构建了相应的数学模型,并基于直接转矩控制策略进行了Matlab仿真验证。文献[7]以两台五相感应电机组成的串联系统为研究对象,基于扩展卡尔曼滤波器的方法对转子位置进行估计,通过Matlab/Simulink仿真实现了无位置传感器的串联系统的解耦控制。但是,这种对于转子位置估计的技术要求电机为正弦波电机,目前难以实现。文献[8]仿真验证了采用功率因数可控的AC-DC变换器直接驱动由两台五相电机组成的串联系统的可行性。文献[9]以工业上常见的双机卷绕系统为背景,研究了双五相电机串联系统解耦控制,仿真研究了这种单逆变器驱动的串联系统在工业应用场合的稳、动态工作特性。文献[10]以六相和三相电机串联系统为例,介绍了解耦控制的原理,给出了在静止坐标系和旋转坐标系下的控制电压和控制电流的形式。可以看出,目前的国外文献主要集中在感应电机串联系统解耦控制的原理探索和仿真验证阶段,且对于多相永磁同步电机串联系统的解耦控制研究较少。
本文提出的永磁同步电机同样适用于这种串联系统[11-16],并针对表贴型转子结构的多相永磁同步电机组成的串联系统,进行了一系列的理论研究。文献[12]对两台双Y移30°永磁同步电机串联系统进行研究,基于SVPWM的矢量控制方法进行解耦控制,给出了电压矢量的选取与合成过程,仿真证明了系统具有良好的稳态和动态性能。文献[13]以两台双Y移30°六相永磁同步电机组成的系统为研究对象,分析了直接转矩控制策略实现串联系统解耦控制的原理,详细阐述了电压矢量的作用,并给出了最优开关矢量表和确定两台电机工作平面的方法。针对一台对称六相PMSM和一台非对称六相PMSM组成的串联系统,文献[14]设计了基于自抗扰技术的控制器,仿真结果显示,该控制器能够实现串联系统的解耦控制,系统具有良好的稳态、动态性能。文献[15]探索了对称六相与三相PMSM串联系统中,空间谐波对系统解耦性的影响,指出对称六相PMSM的2次和4次空间谐波的存在将增大电磁转矩的脉动,致使串联系统的解耦性受到影响。文献[16]研究了串联系统中直流母线电压利用率的问题,计算了对称六相PMSM双电机串联系统逆变器工作在线性调制区的临界条件,分析了零序信号注入提高载波PWM直流母线电压利用率的方法。
通过理论推导可知,在对称六相与三相永磁同步电机串联系统中,三相PMSM的运行状态对六相PMSM不产生影响,而三相PMSM的磁通力矩基波电流映射到六相PMSM产生机电能量转换的子空间时,幅值近乎减半,因此,当三相电机的功率远远小于六相电机时,三相电机对于六相电机的影响可以忽略不计。这种由一台大功率六相PMSM和一台小功率三相PMSM组成的串联系统,尤其适用于飞机、舰船等同时存在主、辅驱动的多电机场合。前期对于这种串联系统开展的理论及仿真研究均基于转子表贴型电机,且缺乏相应的实验验证。考虑到表贴型转子结构可以看作是嵌入式转子结构的一种特殊形式[17],针对转子结构为嵌入式的电机组成的串联系统开展研究更具有实际意义。
本文针对嵌入式转子结构的对称六相PMSM与三相PMSM串联系统进行了相关的试验研究。首先建立起自然坐标系下串联系统的数学模型,通过解耦坐标变换,分别推导旋转坐标系和静止坐标系下串联系统的电流数学模型,采用id=0的滞环控制策略,通过实验研究和分析该串联系统在单台六相逆变器控制下的稳态和动态性能。
-
在对对称六相串联三相永磁同步电机串联系统进行数学建模时,假设:
1) 电机内部磁路均为线性,不计磁饱和问题的影响并忽略定子铁损;
2) 气隙磁场为正弦波分布,忽略谐波的影响;
3) 永磁体和空气的电导率均为零;
4) 电机的定子和转子表面光滑,忽略端部和齿槽效应的影响。
-
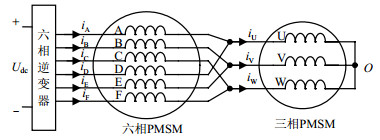
单逆变器驱动的对称六相PMSM和三相PMSM串联系统两台电机相绕组的连接关系如图 1所示。逆变器总计有6路输出,对应6组桥臂,每组桥臂上的一对IGBT分别由互补的两路PWM信号控制。逆变器的6路输出分别对应连接至对称六相PMSM的六相绕组的引入端,六相电机的A相和D相相绕组的引出端连接在一起,并接至三相电机的U相引入端;同理,完成BEV、CFW相绕组的连接。三相电机为星形连接,UVW相相绕组的引出端连接在一起,命名为O点,为两台电机所共有的中性点。

图 1 对称六相串联三相PMSM系统示意图
-
两台电机在自然坐标系下的控制量存在深度耦合,可以通过坐标变换实现电机控制量的剥离和解耦。以下,分别对两台电机各自的机电能量转换进行坐标系定义。
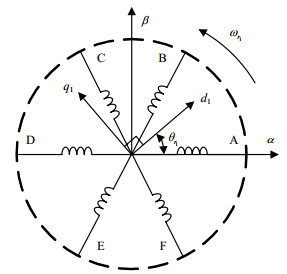
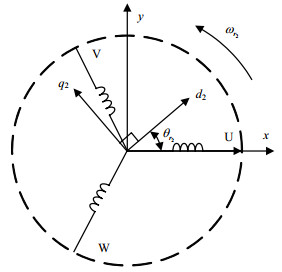
图 2和图 3分别是六相PMSM和三相PMSM实现机电能量转换的坐标系定义,$\alpha \beta $、${d_1} - {q_1}$和$xy$、${d_2} - {q_2}$分别是与六相PMSM和三相PMSM相对应的静止坐标系、同步旋转坐标系。各坐标系下的电压和电流量用$u$和$i$并附加相应下标来表示。${\theta _{{r_{\rm{1}}}}}$、${\omega _{{r_{\rm{1}}}}}$和${\theta _{{r_{\rm{2}}}}}$、${\omega _{{r_{\rm{2}}}}}$分别为六相PMSM和三相PMSM的转子位置、转子转速(以电角度计)。

图 2 六相PMSM机电能量转换平面坐标系

图 3 三相PMSM机电能量转换平面坐标系
根据实变换基本理论和串联系统的电机结构及绕组连接关系,串联系统由自然坐标系向静止坐标系变换的矩阵为[15]:
$$T = \frac{1}{{\sqrt 3 }}\left[ {\begin{array}{*{20}{c}} 1&{\cos {\theta _1}}&{\cos 2{\theta _1}}&{\cos 3{\theta _1}}&{\cos 4{\theta _1}}&{\cos 5{\theta _1}} \\ 0&{\sin {\theta _1}}&{\sin 2{\theta _1}}&{\sin 3{\theta _1}}&{\sin 4{\theta _1}}&{\sin 5{\theta _1}} \\ 1&{\cos {\theta _2}}&{\cos 2{\theta _2}}&1&{\cos {\theta _2}}&{\cos 2{\theta _2}} \\ 0&{\sin {\theta _2}}&{\sin 2{\theta _2}}&0&{\sin {\theta _2}}&{\sin 2{\theta _2}} \\ {1/\sqrt 2 }&{1/\sqrt 2 }&{1/\sqrt 2 }&{1/\sqrt 2 }&{1/\sqrt 2 }&{1/\sqrt 2 } \\ {1/\sqrt 2 }&{ - 1/\sqrt 2 }&{1/\sqrt 2 }&{ - 1/\sqrt 2 }&{1/\sqrt 2 }&{ - 1/\sqrt 2 } \end{array}} \right]$$ (1) 该变换矩阵的逆等于该矩阵的转置,即${\mathit{\boldsymbol{T}}^{ - 1}} = {\mathit{\boldsymbol{T}}^{\rm{T}}}$。其中,${\theta _1} = 60^\circ $,${\theta _2} = 120^\circ $,与两台电机的定子绕组位置关系相对应。
两台电机的旋转变换矩阵分别为:
$${\mathit{\boldsymbol{R}}_{\bf{1}}} = \left[ {\begin{array}{*{20}{c}} {\cos {\theta _{{r_1}}}}&{\sin {\theta _{{r_1}}}} \\ { - \sin {\theta _{{r_1}}}}&{\cos {\theta _{{r_1}}}} \end{array}} \right]$$ (2) $${\mathit{\boldsymbol{R}}_{\bf{2}}} = \left[ {\begin{array}{*{20}{c}} {\cos {\theta _{{r_2}}}}&{\sin {\theta _{{r_2}}}} \\ { - \sin {\theta _{{r_2}}}}&{\cos {\theta _{{r_2}}}} \end{array}} \right]$$ (3) 式中,${\theta _{{r_1}}}$和${\theta _{{r_{\rm{2}}}}}$分别为六相PMSM和三相PMSM的转子磁场与定子绕组第一相轴线之间的夹角。
最终,电机在各自旋转坐标系下六相电机和三相电机的电压方程分别为:
$$\left\{ {\begin{array}{*{20}{l}} {{u_{{d_1}}} = {r_1}{i_{{d_1}}} + {L_{{d_1}}}\frac{{\rm{d}}}{{{\rm{d}}t}}{i_{{d_{\rm{1}}}}} - {\omega _{{r_1}}}{L_{{q_1}}}{i_{{q_1}}}} \\ {{u_{{q_1}}} = {r_1}{i_{{q_1}}} + {L_{{q_1}}}\frac{{\rm{d}}}{{{\rm{d}}t}}{i_{{q_1}}} + {\omega _{{r_1}}}{L_{{d_1}}}{i_{{d_1}}} + {\omega _{{r_1}}}{\psi _{{f_1}}}} \end{array}} \right.$$ (4) $$\left\{ {\begin{array}{*{20}{l}} {{u_{{d_{\rm{2}}}}} = {r_2}{i_{{d_{\rm{2}}}}} + {L_{{d_{\rm{2}}}}}\frac{{\rm{d}}}{{{\rm{d}}t}}{i_{{d_{_{\rm{2}}}}}} - {\omega _{{r_{\rm{2}}}}}{L_{{q_{\rm{2}}}}}{i_{{q_{\rm{2}}}}}} \\ {{u_{{q_{\rm{2}}}}} = {r_2}{i_{{q_{\rm{2}}}}} + {L_{{q_{\rm{2}}}}}\frac{{\rm{d}}}{{{\rm{d}}t}}{i_{{q_{\rm{2}}}}} + {\omega _{{r_{\rm{2}}}}}{L_{{d_{\rm{2}}}}}{i_{{d_{\rm{2}}}}} + {\omega _{{r_{\rm{2}}}}}{y_{{f_{\rm{2}}}}}} \end{array}} \right.$$ (5) 式中,${\psi _{{f_{\rm{1}}}}}$和${\psi _{{f_{\rm{2}}}}}$分别是六相PMSM和三相PMSM的永磁体磁链幅值;r1、r2是与两台电机定子电阻相关的电阻值;${L_{{d_{\rm{1}}}}}$、${L_{{q_{\rm{1}}}}}$、${L_{{d_{\rm{2}}}}}$、${L_{{q_{\rm{2}}}}}$分别是两台电机相关的直、交轴电感值。
从式(4)和式(5)可知,对称六相PMSM和三相PMSM的电压方程只和自身对应同步旋转坐标系下相关分量有关系,不含转子位置信息${\theta _{{r_{\rm{1}}}}}$和${\theta _{{r_{\rm{2}}}}}$。
基于id=0的矢量控制策略下,串联系统中两台电机的电磁转矩方程分别为[17-18]:
$$\begin{gathered} {T_{{e_{\rm{1}}}}} = {p_1}{\psi _{{f_{\rm{1}}}}}({i_\alpha }\sin {\theta _{{r_{\rm{1}}}}} - {i_\beta }\cos {\theta _{{r_{\rm{1}}}}}) = \\ {p_1}{\psi _{{f_{\rm{1}}}}}[({i_{{d_{\rm{1}}}}}\cos {\theta _{{r_{\rm{1}}}}} - {i_{{q_1}}}\sin {\theta _{{r_{\rm{1}}}}})\sin {\theta _{{r_1}}} - \\ ({i_{{d_1}}}\sin {\theta _{{r_1}}} + {i_{{q_1}}}\cos {\theta _{{r_{\rm{1}}}}})\cos {\theta _{{r_1}}}] = {p_1}{\psi _{{f_{\rm{1}}}}}{i_{{q_{\rm{1}}}}} \\ \end{gathered} $$ (6) $$\begin{gathered} {T_{{e_2}}} = {p_2}{\psi _{{f_{\rm{2}}}}}({i_x}\sin {\theta _{{r_2}}} - {i_y}\cos {\theta _{{r_2}}}) = \\ {p_2}{\psi _{{f_{\rm{2}}}}}[({i_{{d_2}}}\cos {\theta _{{r_2}}} - {i_{{q_2}}}\sin {\theta _{{r_2}}})\sin {\theta _{{r_2}}} - \\ ({i_{{d_2}}}\sin {\theta _{{r_2}}} + {i_{{q_2}}}\cos {\theta _{{r_2}}})\cos {\theta _{{r_2}}}] = {p_2}{\psi _{{f_{\rm{2}}}}}{i_{{q_2}}} \\ \end{gathered} $$ (7) 通过式(6)和式(7)可知,在id=0的矢量控制策略下,串联系统中各电机的电磁转矩仅由其电机平面的q轴电流独立控制,互不影响。
-
考虑到实验环节采用电流控制模型,由于逆变器各相输出的电流与六相电机定子绕组电流分别相等,三相电机的相电流为六相电机相应两相绕组电流的矢量和,具体为:
$$\left\{ {\begin{array}{*{20}{c}} {{i_{\rm{U}}} = {i_{\rm{A}}} + {i_{\rm{D}}}} \\ {{i_{\rm{V}}} = {i_{\rm{B}}} + {i_{\rm{E}}}} \\ {{i_{\rm{W}}} = {i_{\rm{C}}} + {i_{\rm{F}}}} \end{array}} \right.$$ (8) 假设逆变器在自然坐标系下的输出电流为:
$$\left[ {\begin{array}{*{20}{c}} {{i_{\rm{A}}}} \\ {{i_{\rm{B}}}} \\ {{i_{\rm{C}}}} \\ {{i_{\rm{D}}}} \\ {{i_{\rm{E}}}} \\ {{i_{\rm{F}}}} \end{array}} \right] = \left[ {\begin{array}{*{20}{l}} {{i_{{m_{\rm{1}}}}}\cos ({\omega _{{r_{\rm{1}}}}}t) + {i_{{m_{\rm{2}}}}}\cos ({\omega _{{r_{\rm{2}}}}}t)} \\ {{i_{{m_{\rm{1}}}}}\cos ({\omega _{{r_{\rm{1}}}}}t - {\theta _1}) + {i_{{m_{\rm{2}}}}}\cos ({\omega _{{r_{\rm{2}}}}}t - {\theta _2})} \\ {{i_{{m_{\rm{1}}}}}\cos ({\omega _{{r_{\rm{1}}}}}t - 2{\theta _1}) + {i_{{m_{\rm{2}}}}}\cos ({\omega _{{r_{\rm{2}}}}}t - 2{\theta _2})} \\ {{i_{{m_{\rm{1}}}}}\cos ({\omega _{{r_{\rm{1}}}}}t - 3{\theta _1}) + {i_{{m_{\rm{2}}}}}\cos ({\omega _{{r_{\rm{2}}}}}t)} \\ {{i_{{m_{\rm{1}}}}}\cos ({\omega _{{r_{\rm{1}}}}}t - 4{\theta _1}) + {i_{{m_{\rm{2}}}}}\cos ({\omega _{{r_{\rm{2}}}}}t - {\theta _2})} \\ {{i_{{m_{\rm{1}}}}}\cos ({\omega _{{r_{\rm{1}}}}}t - 5{\theta _1}) + {i_{{m_{\rm{2}}}}}\cos ({\omega _{{r_{\rm{2}}}}}t - 2{\theta _2})} \end{array}} \right]$$ (9) 可以看出,逆变器的输出电流包含两种成分,${i_{{m_{\rm{1}}}}}$、${\omega _{{r_1}}}$和${i_{{m_{\rm{2}}}}}$、${\omega _{{r_{\rm{2}}}}}$分别表示第一、第二分量的幅值和频率。
对自然系下逆变器的输出电流进行坐标变换:
$${ \mathit{\boldsymbol{{T}}} }\left[ {\begin{array}{*{20}{c}} {{i_{\rm{A}}}} \\ {{i_{\rm{B}}}} \\ {{i_{\rm{C}}}} \\ {{i_{\rm{D}}}} \\ {{i_{\rm{E}}}} \\ {{i_{\rm{F}}}} \end{array}} \right] = \left[ {\begin{array}{*{20}{c}} {\sqrt 3 {i_{{m_{\rm{1}}}}}\cos ({\omega _1}t)} \\ {\sqrt 3 {i_{{m_{\rm{1}}}}}\sin ({\omega _1}t)} \\ {\sqrt 3 {i_{{m_{\rm{2}}}}}\cos ({\omega _2}t)} \\ {\sqrt 3 {i_{{m_2}}}\sin ({\omega _2}t)} \\ 0 \\ 0 \end{array}} \right] = \left[ {\begin{array}{*{20}{c}} {{i_\alpha }} \\ {{i_\beta }} \\ {{i_x}} \\ {{i_y}} \\ {{i_{{o_1}}}} \\ {{i_{{o_2}}}} \end{array}} \right]$$ (10) 由式(10)可知,在新的六维坐标系下,逆变器输出电流中的第一分量仅存在于$\alpha \beta $子平面,逆变器输出电流中的第二分量仅存在于$xy$子平面,${o_1}{o_2}$平面为零序子平面。结合变换矩阵T可知,串联系统中的六相PMSM可以由仅存在于$\alpha \beta $子平面的电流分量控制,三相PMSM可以由仅存在于$xy$子平面的电流分量控制,实现了对串联系统数学模型的解耦变换。
串联系统在静止坐标系下的电压、转矩方程均存在转子位置参数,可以分别进行旋转变换,得到旋转坐标系下两台电机的控制电流为:
$$\left[ {\begin{array}{*{20}{c}} {{i_{{d_1}}}} \\ {{i_{{q_1}}}} \end{array}} \right] = {{\mathit{\boldsymbol{R}}}_1}\left[ {\begin{array}{*{20}{c}} {{i_\alpha }} \\ {{i_\beta }} \end{array}} \right] = \left[ {\begin{array}{*{20}{c}} {\cos {\theta _{{r_1}}}}&{\sin {\theta _{{r_1}}}} \\ { - \sin {\theta _{{r_1}}}}&{\cos {\theta _{{r_1}}}} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {{i_\alpha }} \\ {{i_\beta }} \end{array}} \right]$$ (11) $$\left[ {\begin{array}{*{20}{c}} {{i_{{d_2}}}} \\ {{i_{{q_2}}}} \end{array}} \right] = {{\mathit{\boldsymbol{{R}}}}_2}\left[ {\begin{array}{*{20}{c}} {{i_x}} \\ {{i_y}} \end{array}} \right] = \left[ {\begin{array}{*{20}{c}} {\cos {\theta _{{r_2}}}}&{\sin {\theta _{{r_2}}}} \\ { - \sin {\theta _{{r_2}}}}&{\cos {\theta _{{r_2}}}} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {{i_x}} \\ {{i_y}} \end{array}} \right]$$ (12) -
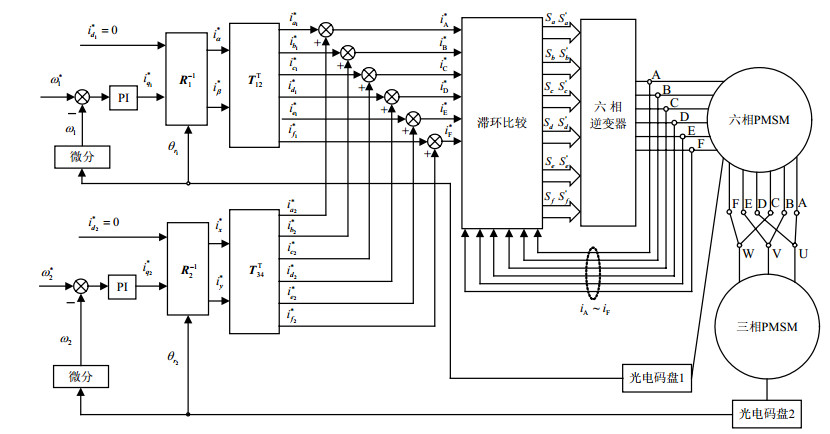
基于${i_d} = 0$滞环控制策略下的串联系统结构框图如图 4所示。两个光电码盘分别与两台电机同轴安装。以六相PMSM为例,DSP接收光电码盘1的脉冲信号,通过计算得到六相电机的转子位置信息。经过微分环节得到电机转速,结合电机的给定转速,经过PI控制器得到六相PMSM在其两相静止坐标系下的$q$轴电流给定$i_{{q_1}}^ * $。同理可得三相PMSM在其两相静止坐标系下的$q$轴电流给定$i_{{q_2}}^ * $。

图 4 串联系统基于id=0的滞环控制原理图
根据变换矩阵${\mathit{\boldsymbol{T}}}$的特殊性,有${{\mathit{\boldsymbol{T}}}^{\rm{T}}} = {{\mathit{\boldsymbol{T}}}^{ - 1}}$。基于${i_d} = 0$的控制策略,两相静止坐标系下的电流量经过${\mathit{\boldsymbol{R}}}_{\rm{1}}^{ - {\rm{1}}}$变换和${\mathit{\boldsymbol{T}}}_{{\rm{12}}}^{\rm{T}}$变换,得到自然坐标系下(即六相逆变器的输出电流中)与六相电机控制相关的电流分量$i_{{a_1}}^ * $~$i_{{f_1}}^ * $,同理得到自然坐标系下控制三相电机的电流分量$i_{{a_2}}^ * $~$i_{{f_2}}^ * $。其中,${\mathit{\boldsymbol{T}}}_{{\rm{12}}}^{\rm{T}}$是变换矩阵${\mathit{\boldsymbol{T}}}$第1、2行的转置(对应六相PMSM),${\mathit{\boldsymbol{T}}}_{34}^{\rm{T}}$是变换矩阵${\mathit{\boldsymbol{T}}}$第3、4行的转置(对应三相PMSM)。
$$\left\{ \begin{array} [c]{l} i_{{a_1}}^* = \frac{1}{{\sqrt 3 }}[i_{{d_1}}^*\cos {\theta _{{r_1}}} - i_{{q_1}}^*\sin {\theta _{{r_1}}}] \\ i_{{b_1}}^* = \frac{1}{{\sqrt 3 }}[i_{{d_1}}^*\cos ({\theta _{{r_1}}} - {\theta _1}) - i_{{q_1}}^*\sin ({\theta _{{r_1}}} - {\theta _1})] \\ i_{{c_1}}^* = \frac{1}{{\sqrt 3 }}[i_{{d_1}}^*\cos ({\theta _{{r_1}}} - 2{\theta _1}) - i_{{q_1}}^*\sin ({\theta _{{r_1}}} - 2{\theta _1})] \\ i_{{d_1}}^* = \frac{1}{{\sqrt 3 }}[i_{{d_1}}^*\cos ({\theta _{{r_1}}} - 3{\theta _1}) - i_{{q_1}}^*\sin ({\theta _{{r_1}}} - 3{\theta _1})] \\ i_{{e_1}}^* = \frac{1}{{\sqrt 3 }}[i_{{d_1}}^*\cos ({\theta _{{r_1}}} - 4{\theta _1}) - i_{{q_1}}^*\sin ({\theta _{{r_1}}} - 4{\theta _1})] \\ i_{{f_1}}^* = \frac{1}{{\sqrt 3 }}[i_{{d_1}}^*\cos ({\theta _{{r_1}}} - 5{\theta _1}) - i_{{q_1}}^*\sin ({\theta _{{r_1}}} - 5{\theta _1})] \\ \end{array} \right.$$ (13) $$ \left\{ \begin{array} [c]{l} i_{{a_2}}^* = i_{{d_2}}^* = \frac{1}{{\sqrt 3 }}[i_{{d_2}}^*\cos {\theta _{{r_2}}} - i_{{q_2}}^*\sin {\theta _{{r_2}}}] \\ i_{{b_2}}^* = i_{{e_2}}^* = \frac{1}{{\sqrt 3 }}[i_{{d_2}}^*\cos ({\theta _{{r_2}}} - {\theta _2}) - i_{{q_2}}^*\sin ({\theta _{{r_2}}} - {\theta _2})] \\ i_{{c_2}}^* = i_{{f_2}}^* = \frac{1}{{\sqrt 3 }}[i_{{d_2}}^*\cos ({\theta _{{r_2}}} - 2{\theta _2}) - i_{{q_2}}^*\sin ({\theta _{{r_2}}} - 2{\theta _2})] \\ \end{array} \right. $$ (14) 当id=0时,上述公式中含有id的项值为0。将上述两部分电流分量进行叠加,得到六相逆变器各相电流的期望输出值$i_{\rm{A}}^ * $~$i_{\rm{F}}^ * $。最后,将各相相电流的期望值与各相相电流的实际值${i_{\rm{A}}}$~${i_{\rm{F}}}$相比较,即得到下一控制周期内相关桥臂上IGBT的开关状态${S_a}, {S'_a}$~${S_f}, {S'_f}$。
-
为验证本文控制策略的有效性,将一台对称六相PMSM和一台三相PMSM按文中所示串联规则进行绕组连接,采用TMS320F2812的DSP控制平台进行实验验证。六相PMSM功率1.5 kW,极对数为2,定子电阻1 Ω,主磁通直轴电感0.003 mH,主磁通交轴电感0.005 7 mH,永磁体磁链幅值0.20 Wb,额定转速1 500 r/m;三相PMSM功率1.5 kW,极对数为2,定子电阻1.2 Ω,主磁通直轴电感0.01 mH,主磁通交轴电感0.02 mH,永磁体磁链幅值0.45 Wb,额定转速1 500 r/m。
-
设定DSP控制周期为30 μs,死区时间为2 μs,六相PMSM的PI控制器参数分别为0.015和0.000 006,三相PMSM的PI控制器参数分别为0.012和0.000 004,给定六相PMSM的转速为500 r/m、转矩为2.7 N·m,给定三相PMSM的转速为200 r/m、转矩为2 N·m,得到串联系统稳态实验结果如图 5所示。

图 5 串联系统稳态实验波形
由图 5可以看出,串联系统的两台电机稳态下能够稳定运行,d轴电流均为零,转速、转矩均能够较好地追踪给定。注意到,由于控制延迟和测量误差等非线性因素的影响,转矩波形上存在一定的脉动,但不影响串联系统解耦性问题的研究工作。
由六相电机相电流及其A相FFT分析结果可以看出,稳态情况下,逆变器输出的相电流为两个正弦波信号的叠加,相电流的主要频率成分为16.67 Hz和6.67 Hz,分别与六相电机和三相电机的转速相对应。三相电机的相电流的FFT分析显示其主要频率成分仅含6.67 Hz。
-
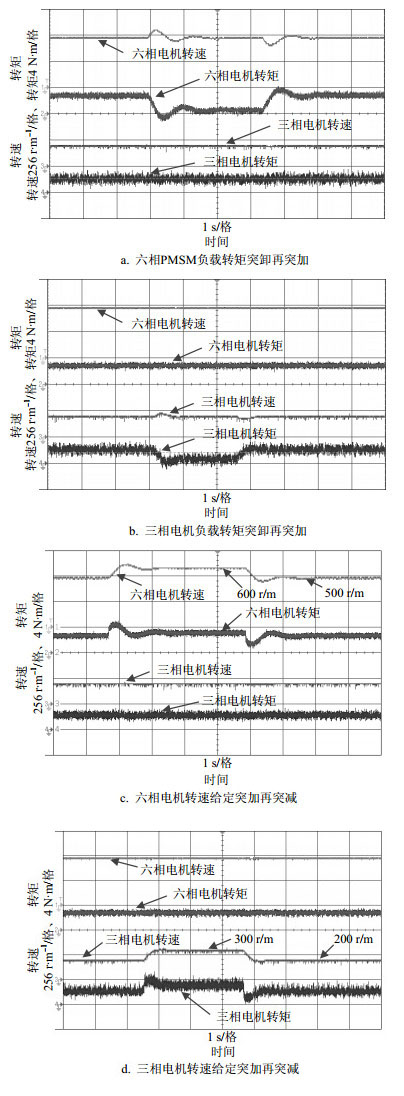
为进一步验证该串联系统的解耦性及动态性能,分别进行串联系统单电机转速、转矩突变的动态实验,如图 6所示。

图 6 串联系统动态实验波形
由图 6可以看出,串联系统的动态响应迅速,两台电机的转矩和转速都能够迅速地跟踪给定,稳态无误差。
由图 6a、图 6b可以看出,串联系统中一台电机的负载发生突变,另一台电机的运行不受影响。注意到,由于空转转矩等的存在,电机在不带载时的稳态转矩输出不为零。
由图 6c、图 6d可以看出,串联系统中一台电机的转速发生突变,另一台电机的运行不受影响。注意到,由于摩擦系数的存在,电机在转速升高后的转矩稳态输出略有升高。
上述实验结果表明,本文的对称六相PMSM串联三相PMSM的数学模型和控制策略能够实验该串联系统的解耦控制,串联系统的稳态和动态性能良好,证明了本文模型分析和控制策略的正确性。
-
本文针对凸极式转子结构的对称六相PMSM与三相PMSM双电机串联系统定子绕组的串联连结关系,从相电流的控制着手,根据解耦控制的需要,利用空间矢量解耦变换矩阵将相电流方程转换到三个相互正交的$\alpha \beta - xy - {o_1}{o_2}$子空间中,并进一步在旋转坐标系下采用单独控制各电机平面的q轴电流(id=0)的滞环控制策略实现串联系统两台电机的解耦控制。实验结果证明本文采用的滞环控制策略实现了对单逆变器驱动的对称六相PMSM与三相PMSM串联系统的解耦控制,串联系统中两台电机具有较好的稳态和动态响应能力。
Decoupling Control of Symmetrical Six-Phase and Three-Phase PMSM Series-Connected System
-
摘要: 针对单逆变器驱动的对称六相永磁同步电机(PMSM)与三相PMSM串联系统,通过解耦变换将控制电流变换到由3个互相垂直的子空间组成的静止坐标系中,六相电机和三相电机分别由第一子空间和第二子空间的电流量控制。通过旋转变换将模型转换到旋转坐标系下,采用矢量控制策略实现了串联系统中两台电机的独立控制和解耦运行。实验结果表明,对称六相串联三相PMSM系统可以实现平稳运行,两台电机的动态响应迅速,转速和转矩互不影响。Abstract: For the symmetrical six-phase permanent magnet synchronous motor (PMSM) and three-phase PMSM series-connected system supplied by single inverter, the control current is transformed into the stationary coordinates composed of three mutually perpendicular subspaces through the decoupling transformation. The six-phase motor and the three-phase motor are controlled by current in the former two subspaces respectively. Furthermore, the mathematical model is transformed into the rotating coordinate system through rotation transformation. The vector control strategy is adopted to realize the independent control and decoupling operation. The experimental result shows that the symmetrical six-phase PMSM and three-phase PMSM series-connected system is able to achieve smooth operation and rapid dynamic response in which the status of one motor has no influence on the other.
-
[1] WILLIAMSON S, SMITH S. Pulsating torque and losses in multiphase induction machines[J]. IEEE Transactions on Industry Applications, 2003, 39(4):986-993. doi: 10.1109/TIA.2003.813722 [2] JONES M, DUJIC D, LEVI E. A five-phase two-motor centre-driven winder with series-connected motors[C]//Conference of the Industrial Electronics Society, 2007, IECON 2007.[S.l.]: IEEE, 2007: 1324-1329. [3] KHAN M R, IQBAL A. MRAS based sensorless control of a series-connected five-phase two-motor drive system[J]. Journal of Electrical Engineering & Technology, 2008, 3(2):224-234. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=JAKO200822179196995 [4] LEVI E, JONES M, VUKOSAVIC S N, et al. A novel concept of a multiphase, multimotor vector controlled drive system supplied from a single voltage source inverter[J]. Power Electronics IEEE Transactions on, 2004, 19(2):320-335. doi: 10.1109/TPEL.2003.823241 [5] GATARIC S. A polyphase cartesian vector approach to control of polyphase AC machines[C]//Conference Record of the Industry Applications Conference, 2000. Rome, Italy: IEEE, 2002, 3: 1648-1654. https://ieeexplore.ieee.org/document/882102 [6] LEVI E, JONES M, VUKOSAVIC S N. Even-phase multi-motor vector controlled drive with single inverter supply and series connection of stator windings[J]. IEE Proceedings-Electric Power Applications, 2003, 150(5):580-590. doi: 10.1049/ip-epa:20030424 [7] KHAN M R, IQBAL A. Extended Kalman filter based speeds estimation of series-connected five-phase two-motor drive system[J]. Simulation Modelling Practice & Theory, 2009, 17(7):1346-1360. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=543e8802af406733ebb939c77d6d1311 [8] SALEH M, IQBAL A, AHMED S M, et al. Matrix converter based five-phase series-connected two-motor drive system[C]//201222nd Australasian Universities Power Engineering Conference. Bali, Indonesia: IEEE, 2012: 1-6. [9] JONES M, DUJIC D, LEVI E. A five-phase two-motor centre-driven winder with series-connected motors[C]//Conference of the Industrial Electronics Society, 2007, IECON 2007.[S.l.]: IEEE, 2007: 1324-1329. [10] LEVI E J M, VUKOSAVIC S N. A series-connected two-motor six-phase drive with induction and permanent magnet machines[J]. IEEE Transactions on Energy Conversion, 2006, 21(1):121-129. doi: 10.1109/TEC.2005.853737 [11] 肖支才, 戴邵武, 阎红广, 等.单逆变器驱动的多相电机串联系统综述[J].海军航空工程学院学报, 2015, 30(3):235-240. http://d.old.wanfangdata.com.cn/Periodical/hjhkgcxyxb201503007 XIAO Zhi-cai, DAI Shao-wu, YAN Hong-guang, et al. Summarization of multiphase series system with single voltage source inverter[J]. Journal of Naval Aeronautical and Astronautical University, 2015, 30(3):235-240. http://d.old.wanfangdata.com.cn/Periodical/hjhkgcxyxb201503007 [12] 刘陵顺, 张海洋, 苗正戈.双Y移30°永磁同步电机串联系统矢量控制仿真[J].兵工自动化, 2011, 30(9):38-40. doi: 10.3969/j.issn.1006-1576.2011.09.011 LIU Ling-shun, ZHANG Hai-yang, MIAO Zheng-ge. Simulation of vecotr control for double Y Shift 30° PMSM series system[J]. Ordnance Industry Automation, 2011, 30(9):38-40. doi: 10.3969/j.issn.1006-1576.2011.09.011 [13] 史贤俊, 刘陵顺, 张树团.六相PMSM串联系统的直接转矩控制策略的研究[J].电气自动化, 2013, 35(1):40-42. doi: 10.3969/j·issn.1000-3886.2013.01.015 SHI Xian-jun, LIU Ling-shun, ZHANG Shu-tuan. Research on DTC of six-phase two-motor series-connected system[J]. Electrical Automation, 2013, 35(1):40-42. doi: 10.3969/j·issn.1000-3886.2013.01.015 [14] 苗正戈, 刘陵顺, 张海洋.两个不同结构六相永磁同步电机串联驱动系统[J].电机与控制应用, 2011, 38(7):17-21. doi: 10.3969/j.issn.1673-6540.2011.07.004 MIAO Zheng-ge, LIU Ling-shun, ZHANG Hai-yan. Drive system of series-connected two different structural six-phase permanent magnet synchronous motor[J]. Electric Machines & Control Application, 2011, 38(7):17-21. doi: 10.3969/j.issn.1673-6540.2011.07.004 [15] 刘陵顺, 闫红广, 韩浩鹏, 等.空间谐波对对称六相与三相PMSM串联系统的影响[J].西南交通大学学报, 2017, 52(2):348-354. doi: 10.3969/j.issn.0258-2724.2017.02.019 LIU Ling-shun, YAN Hong-guang, HAN Hao-peng, et al. Effects of space harmonics on series-connected symmetrical six-and three-phase permanent magnet synchronous motors driver system[J]. Journal of Southwest Jiaotong University, 2017, 52(2):348-354. doi: 10.3969/j.issn.0258-2724.2017.02.019 [16] 韩浩鹏, 刘陵顺, 张少一.对称六相PMSM双电机串联系统直流母线电压利用率的研究[J].船电技术, 2014, 34(2):6-9. doi: 10.3969/j.issn.1003-4862.2014.02.002 HAN Hao-peng, LIU Ling-shun, ZHANG Shao-yi, et al. Research on DC-bus utilization of driver system with symmetrical six-phase two-motor connected in series[J]. Marine Electric & Electronic Technology, 2014, 34(2):6-9. doi: 10.3969/j.issn.1003-4862.2014.02.002 [17] 王成元, 夏加宽, 孙宜标.现代电机控制技术[M].第2版.北京:机械工业出版社, 2014. WANG Cheng-yuan, XIA Jia-kuan, SUN Yi-biao. Modern control technology for electric machines[M]. 2nd ed. Beijing:China Machine Press, 2014. [18] 薛山.多相永磁同步电机驱动技术研究[D].北京: 中国科学院研究生院(电工研究所), 2006. http://cdmd.cnki.com.cn/Article/CDMD-80148-2006099458.htm XUE Shan. Research on drive technology of multiphase permanent magnet synchronous motor[D]. Beijing: Institute of Electrical Engineering, Graduate School of Chinese Academy of Sciences, 2006. http://cdmd.cnki.com.cn/Article/CDMD-80148-2006099458.htm -

 点击查看大图
点击查看大图
图(6)
计量
- 文章访问数: 4676
- HTML全文浏览量: 2197
- PDF下载量: 90
- 被引次数: 0
