 ISSN
ISSN 


-
视觉跟踪是计算机视觉的重要研究课题之一,被应用到视频监控、智能交通、人体动作识别等诸多领域。自文献[1]首次将Mean Shift算法应用到视觉目标跟踪以来,Mean Shift因算法简洁,实时性好,对目标变形、旋转和部分遮挡具有一定的鲁棒性,得到了广泛的研究和应用[2-4]。但由于实际跟踪环境错综复杂,有很多不确定的因素和不可预测的状态存在,Mean Shift算法的缺陷也是显而易见的[5]。当目标部分被遮挡或是受到复杂背景干扰时,算法容易收敛于背景中与目标特征相似的区域[6],导致跟踪失败;原始的Mean Shift算法的跟踪窗口大小是固定的,当目标存在明显尺度变化时,需要自适应计算带宽[7]。因此,各种改进的Mean Shift算法相继被提出,如多特征多算法融合算法[8-9]、尺度自适应算法[10-11]、改进的直方图模型算法[12-13]及快速跟踪算法[14],这些改进算法的提出更有效地挖掘了算法的应用潜力。
针对复杂背景干扰而导致的跟踪失败问题,文献[1]提出了在目标模型和候选目标模型的直方图中融入背景加权信息的(background-weighted histogram, BWH)算法[1],文献[15]对BWH算法与无背景信息的等价性作了验证,并提出了改进的(corrected BWH, CBWH)算法,即只对目标模型进行BWH变换,而不变换目标候选模型。CBWH方法仅仅使用了背景信息,没有对背景信息做进一步处理。文献[16]在CBWH算法的基础上,使用由基于目标核直方图和背景直方图的对数似然比推导出的权值对目标模型进行变换来建立目标模型的HRBW(histogram of ration background-weighted算法,能够解决CBWH方法中背景单一时导致权值都为1的情况,并减少了算法的运行时间。但该算法仅适用于背景较为简单的情况,在复杂背景下有跳帧情况出现。
本文主要针对复杂背景干扰的情况,利用目标模型和背景模型的差分,引入了模糊背景加权(fuzzy background weighting, FBW)的目标模型,更加细化地表示各个像素对目标准确描述的贡献度,以提高目标描述准确性。并同时利用背景信息对尺度增减法进行改进,从而实现自适应跟踪窗,提高了Mean Shift算法在复杂背景干扰下的鲁棒性。
-
模糊集合理论在1965年被提出,为处理不严密的信息提供了一种方法,并广泛应用于图像处理技术中。本文将模糊集合理论的思想应用于目标模型的描述中,以提高目标模型描述的准确性。
-
通常数学中习惯处理“干脆的”集合,一个集合中的成员,只有两个取值,1或0,非真即假。对小于Mean Shift目标跟踪来说,通常以椭圆或矩形框来划分目标区域与背景区域,通过比较目标区域与目标候选区域颜色直方图来判断目标的具体位置。椭圆或者矩形框的大小直接影响着对目标的准确描述,以“干脆的”集合来描述目标即:框内为目标区域,所有像素点的颜色特征权值为1;框外为背景区域,其颜色特征权值为0。然而,实际的跟踪场景都比较复杂,目标区域内的颜色特征对目标模型的贡献度不一样。一般来说越接近目标中心的颜色特征对准确描述目标的贡献越大,离目标中心位置越远的颜色特征其贡献越小,而周围相邻背景中与目标相似的颜色特征不仅对准确描述目标没有帮助,往往还会对目标的描述造成干扰。因此,在计算目标颜色直方图模型时,将目标中与背景颜色极为相似的特征给予较小的权值,而目标独有的像素特征则赋予较大的权值[17]。本文通过模糊隶属函数来计算像素归属目标的概率,通过增大目标独有颜色的特征权值,压制目标邻近区域颜色特征的干扰,来提高目标描述的准确性。
定义模糊隶属集合$T = \{ {v_T}(x),x \in U\} $,其中T表示目标全部像素, U表示目标模型颜色特征,x表示目标模型中任意一个颜色特征。${v_T}(x)$表示x属于T的隶属度,且${v_T}(x) \in [0,1]$。若${v_T}(x) = 0$,则表示x不属于T,${v_T}(x) = 1$表示x完全属于T,而${v_T}(x) = 0.5$表示U上属于T的模糊分界点,${v_T}(x) > 0.5$表示$x$有较大的可能属于T,${v_T}(x) < 0.5$表示$x$有较小的可能属于T。因此,构造一个模糊隶属函数${v_T}(x)$对目标模型进行加权,能获得更准确的目标模型。
-
模糊隶属函数的确定方法大体分为:模糊统计方法、指派方法(含偏小型、偏大型、中间型等分布)以及二元对比排序法。其中,二元对比排序法的基本思想是:对于一些很难直接给出隶属度的模糊集,通过两两比较来确定相应隶属度的大小,再用数学方法加工得到隶属函数。Mean Shift目标跟踪涉及到的是目标区域和相邻背景区域像素点的颜色相似程度,并根据二者颜色的对比来确定每一个颜色特征是否隶属于目标及隶属于目标的程度。因此,本文借鉴二元对比排序法,将目标区域和相邻背景区域的颜色直方格值进行比较,从而判定目标区域内该颜色隶属于目标的程度,再根据这个隶属程度对原始的目标颜色直方图模型进行加权。
基于差分的模糊隶属函数主要是针对目标颜色直方图模型qu和背景颜色直方图模型bu进行差分比较。设模糊隶属函数为v,比较qu、bu的大小,如果bu=0,qu≠0,或bu≠0,qu > > bu,说明为目标独有或与背景相比目标远远占优的特征值,对准确描述目标的贡献最大,则v=1;如果bu≠0,qu < < bu,说明为背景远远占优的特征值,会对目标的描述造成干扰,则v=0;如果bu=qu且qu、bu都不为0,此时具有最大的模糊性,则v=0.5;如果qu > bu,则根据qu、bu的差值,赋予隶属函数v中该位置为0.5~1;如果qu < bu,则根据qu、bu的差值,赋予v中该位置为0~0.5。根据以上分析,构造模糊隶属函数如下:
$$ v = \left\{ {\begin{array}{*{20}{l}} 1&{{b_u} = 0,{q_u} \ne 0}\\ 1&{{b_u} \ne 0,{q_u} > > {b_u}}\\ 0&{{b_u} \ne 0,{q_u} < < {b_u}}\\ {0.5}&{{d_u} = 0}\\ {0.5 \pm \frac{{0.5{q_u}(u)}}{T}}&{{d_u} > 0{\rm{ }}或{\rm{ }}{d_u} < 0{\rm{ }}} \end{array}} \right. $$ (1) 式中,T为qu的最大值;${d_u} = {q_u}(u) - {b_u}(u)$,${d_u} \in ( - 1,1)$,u为颜色量化等级,${q_u} > > {b_u}$和${q_u} < < {b_u}$以相差3个数量级为标准进行判定。
-
Mean Shift的基本理论这里就不再阐述。本文提出的模糊隶属函数v用于对文献[1]的目标模型进行加权,加权后的目标模型定义为:
$$\begin{gathered} {{q'}_u} = vC\sum\limits_{i = 1}^n {k\left( {{{\left\| {\frac{{{y_0} - x_i^*}}{h}} \right\|}^2}} \right)} \delta [{b_f}(x_i^*) - u] \\ u = 1,2, \cdots ,m \\ \end{gathered} $$ (2) $C'$是使得$\sum\limits_{u = 1}^m {{{q'}_u}} = 1$归一化的常数,其值为:
$$C' = \frac{1}{{v\sum\limits_{i = 1}^n k \left( {{{\left\| {\frac{{{y_0} - x_i^*}}{h}} \right\|}^2}} \right)}}$$ (3) -
Mean Shift算法的跟踪尺度是固定的,但实际跟踪场景中目标的尺寸往往是实时变化的,核窗的尺寸也应该随之变化。尺度增减自适应法计算量小,但主要存在两个问题:小尺度游荡问题和尺度跟踪滞后问题[18]。这两个缺陷都可能引起大的尺度定位偏差,从而降低跟踪器的鲁棒性。
原始的尺度增减自适应法,主要考虑了在不同的尺度下候选目标和目标的相似程度,没有考虑候选目标周围背景和目标的非相似度,从而导致跟踪窗口的自适应效果不佳。本文提出了在多尺度计算的基础上,加入对候选目标周围背景和目标的非相似度的判定。最佳窗口的判定规则是:所给定的窗口能够包含完整的目标,且所含背景区域尽量少。如图 1所示为窗口与目标的匹配关系,实线区域为目标区域,虚线和实线之间的环状区域为背景区域,最佳窗口如图 1b所示,实线区域因含有全部目标和少量背景,因而与目标最相似,与背景最不相似;图 1c中由于窗口过大而含有过多的背景,因此与目标的相似度减小而与背景的相似度增大;图 1d中窗口过小没有包含完整的目标,因而背景区域含有部分目标,所以背景与目标的相似度也会增大。因此,当候选目标和目标的相似度最大,同时候选目标周围背景和目标的非相似度值也最大时为最佳窗口。

图 1 跟踪窗口与目标匹配图
设跟踪窗口为W,宽为w,高为h,取该跟踪窗外部宽2w、高2h的区域为背景区域。在不同尺度${s_c}$(${s_c}$=0.8~1.2)上计算初始目标模型和背景模型以及初始目标模型和候选目标模型的相似度函数${\rho _{{{q'}_u}{b_u}}},{\rho _{{{q'}_u}{p_u}}}$,即:
$${\rho _{{{q'}_u}{b_u}}} = \sum\limits_{u = 1}^m {\sqrt {{{q'}_u}{b_u}} } \begin{array}{*{20}{c}} {}&{}&{{\rho _{{q_u}{p_u}}} = \sum\limits_{u = 1}^m {\sqrt {{p_u}(y){{q'}_u}} } } \end{array}$$ (4) 跟踪窗口校正系数$\alpha $为:
$$\alpha {\rm{ = }}\lambda {\left. {{s_c}} \right|_{{\rm{max}}({\rho _{{{q'}_u}{p_u}}})}} + (1 - \lambda ){\left. {{s_c}} \right|_{{\rm{min}}({\rho _{{{q'}_u}{b_u}}})}}$$ (5) 式中,为$\lambda $加权系数,本实验取$\lambda = 0.35$,以保证背景和初始目标模型非相似度值为最大。
则校正后的跟踪窗为:
$${w_{{\rm{opt}}}} = \alpha w,\begin{array}{*{20}{c}} {}&{{h_{{\rm{opt}}}} = \alpha h} \end{array}$$ (6) $$\begin{gathered} {w_{{\rm{new}}}} = \gamma {w_{{\rm{opt}}}} + (1 - \gamma ){w_{{\rm{prev}}}} \\ {h_{{\rm{new}}}} = \gamma {h_{{\rm{opt}}}} + (1 - \gamma ){h_{{\rm{prev}}}} \\ \end{gathered} $$ (7) 式中,$\gamma $为滤波器平滑系数,目标变化越剧烈该值越大,本文实验中取$\gamma {\rm{ = }}0.2$。
-
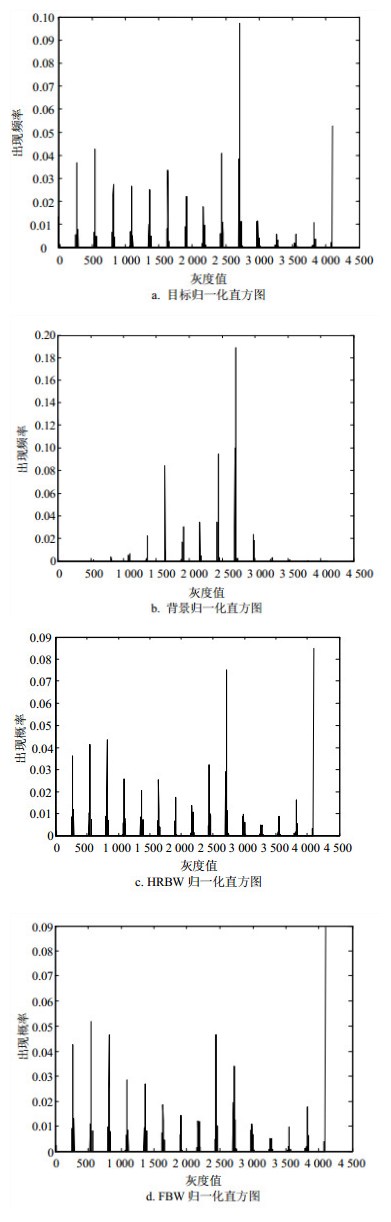
本文实验均在win10 64位,CPU 2.10 GHz,RAM 4 GB环境下,采用Matlab 2012a仿真得到。本节针对不同的场景做了一系列实验来证明本文的差分模糊函数背景加权的有效性。这里选取MountainBike为例,该视频为640*360像素,共228帧,具有旋转、轻微尺度变化及背景杂乱特征。本节算法采用差分模糊背景加权法对目标模型进行加权,HRBW算法采用对数似然比值法进行加权,其颜色直方图对比如图 2所示。

图 2 MountainBike视频目标颜色直方图对比
从图 2a、b可以看出,背景在1 638、2 439、2 712灰度处取值分别为0.083 8、0.094 5、0.188 6,而目标在这3点的值为0.033 5、0.040 7、0.097 3,处于这些灰度处的像素属于目标和背景共有的像素,且背景拥有量大于目标拥用量,会对目标的准确描述造成干扰,应该抑制;在目标直方图 274、547和4 096灰度处取值分别为0.036 6、0.042 6、0.052 9,而这些灰度处背景直方图的取值为0,独属于目标像素,对准确描述目标的贡献度大,应该加大权值。从图 2c、2d可以看出HRBW算法在1 638、2 439、2 712灰度处取值分别为0.025 5、0.031 1、0.075 1,本文FBW算法取值分别为0.018 5、0.020 0、0,对于目标和背景共有像素,HRBW算法和本文算法都进行了抑制,但本文抑制较大;在274、547及4 096灰度处,属于目标独有像素,应该加大权值,HRBW在这3点的取值分别为0.036 2、0.041 1、0.084 9,本文为0.042 5、0.051 6、0.089 3,不难看出,本文对目标独有像素给予的权值更大些。因此,本文算法对复杂背景下目标模型的准确描述更为合适,图 3的视频跟踪结果也说明了这一结论。

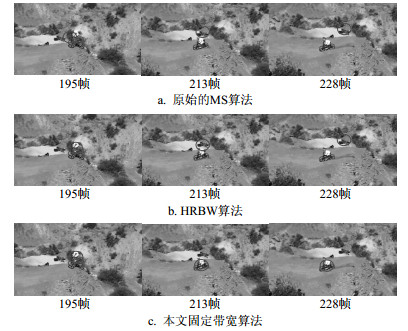
图 3 MountainBike视频实验结果
本实验中,原始MS算法在195、213、228帧的Bhattacharyya系数分别为:0.883 6、0.857 5、0.842 7,更新后的中心坐标及误差为:(281.14, 170.31:29.36)、(308.75, 143.66:57.59)、(379.21, 130.22:117.93);HRBW算法Bhattacharyya系数分别为:0.802 1、0.859 9、0.860 4,更新后的中心坐标及误差为:(312.23, 174.74:4.12)、(306.88, 156.11:44.99)、(376.87, 131.34:115.45);本文固定带宽算法Bhattacharyya系数分别为:0.835 5、0.905 1、0.892 2,更新后的中心坐标及误差为:(311.06, 167.67:3.38)、(300.68, 204.85:4.51)、(290.61, 210.66:2.19)。从图 3可以看出,原始的MS算法从195帧开始偏移目标,213帧后在目标周围相似背景的影响下,原始的MS算法和HRBW算法都几乎偏移了目标,228帧只有本文模糊背景加权的算法准确地定位了目标。
在跟踪精度评估上,采用中心位置误差来衡量,即跟踪的目标中心位置和手工标定的目标准确位置之间的平均欧式距离(mean euclidean distance, MED),欧式距离定义为:
$${\rm{ED}} = \sqrt {{{(x - {x_1})}^2} + {{(y - {y_1})}^2}} $$ (8) 式中,(x, y)为准确位置坐标;(x1, y1)为算法估计位置坐标。
多数跟踪算法跟踪成功率的评估标准是边界框的重叠率,即采用跟踪得到的目标区域与真实目标区域间的重叠率来评价算法的跟踪性能,定义为:
$$S = \frac{{\left| {A \cap B} \right|}}{{\left| {A \cup B} \right|}}$$ (9) 式中,A表示跟踪算法得到的目标区域;B为手动确定的真实目标区域;$ \cap $和$ \cup $分别表示两个区域的交集和并集;${\rm{|}} \cdot {\rm{|}}$表示区域内的像素点数,设置门限值t0=0.5,大于此门限值则认为跟踪成功。
从表 1可以看出,本文提出的算法在各种指标上均优于HRBW算法。
表 1 MountainBike视频3种算法跟踪性能比较
算法 中心位置误差均值/像素 平均迭代次数/帧 运行速度/s·帧-1 跟踪成功率/% HRBW 17.37 2.04 0.043 67.9 原始MS 19.06 2.28 0.047 57.1 FBW 8.34 1.70 0.042 93.9 -
在差分模糊背景加权的基础上,引入了改进的尺寸增减法自适应尺寸。以Bolt视频为实验对象,为480*270像素,共293帧,具有变形、尺度变化以及背景杂乱特征。HRBW和FBW算法颜色直方图不再列出,其直方图数值对比如下:背景直方图在204 6、267 9、802处的取值分别为:0.111 0、0.058 9、0.001 2;未加权之前目标在这3点的取值分别为:0.037 5、0.009 2以及0.069 4;经过HRBW算法加权后取值为:0、0.019 3以及0.069 9;经过FBW算法加权后取值为:0、0.011 6以及0.103 0。在2 046、2 069处背景具有较大的取值,属于干扰因素,应该抑制;在802处背景具有较小的取值,能更为准确地描述目标,应该加大权值。通过数据对比可以看出,FBW算法无论在抑制背景干扰还是在加大目标占优像素的权值上都更胜一筹。Bolt视频跟踪结果如图 4所示。

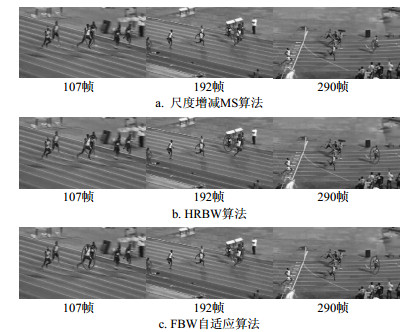
图 4 Bolt视频实验结果
本实验中,尺度增减MS算法在107、192、290帧的Bhattacharyya系数分别为:0.803 2、0.754 3、0.767 1,窗口校正系数分别为:1、1、1.1,中心坐标及误差为:(268.86, 114.96:18.98)、(343.33, 119.53: 10.07)、(358.41, 140.56:26.63);HRBW算法的Bhattacharyya系数分别为:0.804 4、0.702 3、0.691 0,无窗口校正机制,中心坐标及误差为:(268.64, 107.89: 14.39)、(313.77, 97.92:40.17)、(387.43, 145.22:5.24);本文算法的Bhattacharyya系数分别为:0.8259、0.8460、0.8107,窗口校正系数分别为:0.9550、1.0650、1.0650,中心坐标及误差为:(255.00, 109.30: 8.36)、(351.01, 106.99:6.01)、(387.60, 143.51:3.54)。由图 4可知,本文FBW算法的Bhattacharyya系数较大而中心位置误差较小,尺度增减MS算法在目标由小变大,又从大变小的过程中跟踪窗口没有很好地适应目标的变化,由于小尺度游荡问题导致跟踪效果不佳。HRBW算法从185帧开始在目标附近其他运动员的干扰下跳帧,没有跟上目标,直到211帧时才重新跟上目标。
表 2 Bolt视频3种算法跟踪性能比较
算法 中心位置误差均值/像素 平均迭代次数/帧 运行速度/s·帧-1 跟踪成功率率/% HRBW 11.00 3.16 0.052 66.6 尺寸增减MS 10.03 3.05 0.089 56.3 FBW自适应 5.96 2.88 0.130 98.0 表 2列出了3种算法跟踪性能,图 5列出了3种算法的中心误差曲线、目标跟踪轨迹对比曲线以及改进的尺度增减法和原始尺度增减法与目标真实尺寸的对比曲线。

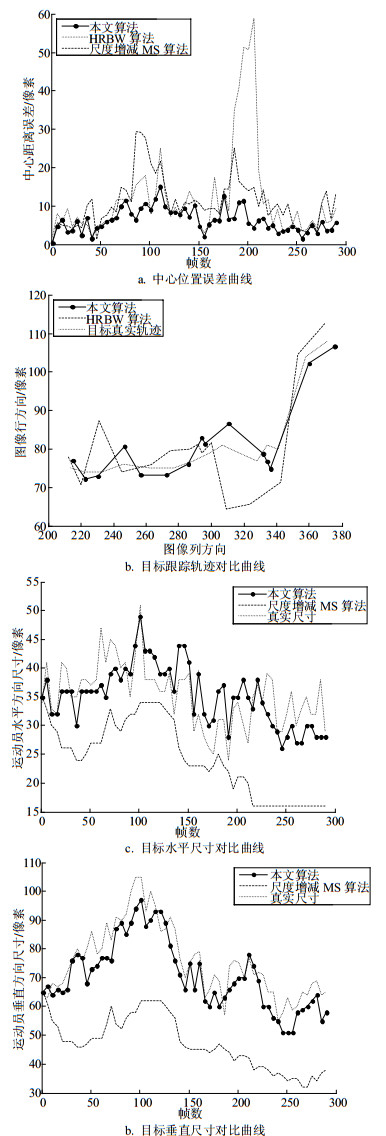
图 5 Bolt视频实验数据
从图 5a可以看出,HRBW算法后半程误差都较大,在185~210帧误差均值达41.87像素,误差最大值在206帧处,误差值为58.86像素;本文算法误差最大值在87、104、177等帧处,误差分别为14.19、16.72以及15.65像素。图 5b的跟踪轨迹图也显示了本文算法与目标真实轨迹较接近。从图 5c、5d可以看出,第24帧时目标真实尺寸为(32, 73)像素,原始MS算法为(26, 48)像素,本文算法为(31, 68)像素;100帧时真实尺寸为(51, 105)像素,原始MS算法为(34, 62)像素,本文算法为(48, 89)像素;293帧时真实尺寸为(36, 61)像素,原始MS算法为(16, 38)像素,本文算法为(28, 61)像素。从以上分析及图 5c、5d可知,本文算法曲线与目标的真实尺寸比较接近,说明本文算法获取的目标尺寸和真实尺寸比较接近,而原始的尺度增减自适应算法获取的目标尺寸,则在目标尺寸减小之后就一直减小,和目标的真实尺寸差异较大。HRBW算法未提出尺寸自适应机制,因此在目标尺寸上未列入比较。由以上分析可知,本文算法虽然牺牲了一定的速度,但在跟踪的精度和成功率上相较HRBW算法提高了很多。
Mean Shift Tracking Based on Fuzzy Background Weighting
-
摘要: 针对Mean Shift跟踪算法在复杂背景下跟踪效果不佳的问题,该文提出了基于模糊背景加权的Mean Shift算法。引入基于差分的模糊隶属函数,利用目标模型和背景模型的差分,更加细化地表示各个像素对目标准确描述的贡献度,提高了目标描述的准确性。同时利用背景信息对原始的尺度增减法进行改进,更好地适应了目标尺度变化。实验验证该算法在一定程度上解决了尺寸增减法的小尺度游荡和跟踪滞后问题,提高了Mean Shift算法在复杂背景干扰下的鲁棒性。
-
关键词:
- 背景加权 /
- 模糊集合 /
- Mean Shift /
- 尺度自适应 /
- 目标跟踪
Abstract: Aiming at the problem that Mean Shift tracking algorithm cannot track well in complicated background, a Mean Shift algorithm based on fuzzy background weighting is proposed. It introduces a fuzzy membership function based on difference, which makes use of the difference between target model and background model in order to represents each pixel contribution to target exact description, and improves target description accuracy. At the same time, the original scale increment and decrement method is improved by using background information for adapting to target scale changing. Experimental results show that the proposed algorithm solves the problem of small-scale wandering and tracking hysteresis of the scale increment and decrement method to a certain extent, and improves the robustness of Mean Shift algorithm under complex background disturbances.-
Key words:
- background weighting /
- fuzzy sets /
- Mean Shift /
- scale adaptation /
- target tracking
-
表 1 MountainBike视频3种算法跟踪性能比较
算法 中心位置误差均值/像素 平均迭代次数/帧 运行速度/s·帧-1 跟踪成功率/% HRBW 17.37 2.04 0.043 67.9 原始MS 19.06 2.28 0.047 57.1 FBW 8.34 1.70 0.042 93.9  下载: 导出CSV
下载: 导出CSV
表 2 Bolt视频3种算法跟踪性能比较
算法 中心位置误差均值/像素 平均迭代次数/帧 运行速度/s·帧-1 跟踪成功率率/% HRBW 11.00 3.16 0.052 66.6 尺寸增减MS 10.03 3.05 0.089 56.3 FBW自适应 5.96 2.88 0.130 98.0
下载: 导出CSV
-
[1] COMANICIU D, RAMESH V, MEER P. Kernel-based object tracking[J]. IEEE Transactions on Pattern Analysis Machine Intelligence, 2003, 5(2):564-577. http://d.old.wanfangdata.com.cn/Periodical/zgjg-e200803004 [2] CHEN Xiao-hui, ZH Meng-jiao, RUAN Kai et al. Improved Mean Shift target tracking based on self-organizing maps[J]. Signal, Image and Video Processing, 2014, 8(1):103-112. http://cn.bing.com/academic/profile?id=19cbd0f8c9bed2359e470ec00603f956&encoded=0&v=paper_preview&mkt=zh-cn [3] JEOMG J, YOON T S, JIN B P. Mean shift tracker combined with online learning-based detector and Kalman filtering for real-time tracking[J]. Expert Systems With Applications, 2017, 79(15):194-206. http://cn.bing.com/academic/profile?id=e3eae699956a5e484e8ff1a20f382666&encoded=0&v=paper_preview&mkt=zh-cn [4] 李翠芸, 桂阳, 刘靳.基于Mean Shift迭代的新生未知多扩展目标跟踪[J].控制与决策, 2017, 32(3):521-525. http://d.old.wanfangdata.com.cn/Periodical/kzyjc201703019 LI Cui-yun, GUI Yang, LIU Jin. Unknown newly born multiple extended targets tracking based on Mean Shiftiteration[J]. Control and Decision, 2017, 32(3):521-525. http://d.old.wanfangdata.com.cn/Periodical/kzyjc201703019 [5] 顾幸方, 茅耀斌, 李秋洁.基于Mean Shift的视觉目标跟踪算法综述[J].计算机科学, 2012, 39(12):16-24. doi: 10.3969/j.issn.1002-137X.2012.12.005 GU Xing-fang, MAO Yao-bin, LI Qiu-jie. Survey on visual tracking algorithms based on Mean Shift[J]. Computer Science, 2012, 39(12):16-24. doi: 10.3969/j.issn.1002-137X.2012.12.005 [6] 黄安奇, 侯志强, 余旺盛, 等.利用背景加权和选择性子模型更新的视觉跟踪算法[J].中国图象图形学报, 2014, 19(9):1360-1367. http://d.old.wanfangdata.com.cn/Periodical/zgtxtxxb-a201409013 HUANG An-qi, HOU Zhi-qiang, YU Wang-sheng, et al. Visual object tracking method based on weighted background and selective sub-model update strategy[J]. Journal of Image and Graphics, 2014, 19(9):1360-1367. http://d.old.wanfangdata.com.cn/Periodical/zgtxtxxb-a201409013 [7] 周芳芳, 樊晓平, 叶榛.均值漂移算法的研究与应用[J].控制与决策, 2007, 22(8):841-847. doi: 10.3321/j.issn:1001-0920.2007.08.001 ZHOU Fang-fang, FAN Xiao-ping, YE Zhen. Mean shift research and applications[J]. Control and Decision, 2007, 22(8):841-847. doi: 10.3321/j.issn:1001-0920.2007.08.001 [8] ZHOU Hui-yu, YUAN yuan, SHI Chun-mei. Object tracking using SIFT features and Mean Shift[J]. Computer Vision and Image Understanding, 2009, 113(3):345-352. http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ0216596652/ [9] 马丽, 常发亮, 乔谊正.基于均值漂移算法和粒子滤波算法的目标跟踪[J].模式识别与人工智能, 2006, 19(6):787-793. doi: 10.3969/j.issn.1003-6059.2006.06.018 MA Li, CHANG Fa-liang, QIAO Yi-zheng. Target tracking based on Mean Shift algorithm and particle filtering algorithm[J]. Pattern Recognition and Artificial Intelligent, 2006, 19(6):787-793. doi: 10.3969/j.issn.1003-6059.2006.06.018 [10] 张凤军, 赵岭, 安国成, 等.一种尺度自适应的Mean Shift跟踪算法[J].计算机研究与发展, 2014, 55(1):215-224. http://d.old.wanfangdata.com.cn/Periodical/jsjyjyfz201401021 ZHANG Feng-jun, ZHAO Ling, AN Guo-cheng et al. Mean Shift tracking algorithm with scale adaptation[J]. Journal of Computer Research and Development, 2014, 55(1):215-224. http://d.old.wanfangdata.com.cn/Periodical/jsjyjyfz201401021 [11] SONG Yi, LI Shu-xiao, ZHU Cheng-fei. Invariant foreground occupation ratio for scale adaptive Mean Shift tracking[J]. IET Computer Vision, 2015, 9(4):489-499. doi: 10.1049/iet-cvi.2014.0150 [12] 李培华.一种改进的Mean Shift跟踪算法[J].自动化学报, 2007, 33(4):347-354. http://d.old.wanfangdata.com.cn/Periodical/zdhxb200704003 LI Pei-hua. An improved Mean Shift algorithm for object tracking[J]. Acta Automatica Sinica, 2007, 33(4):347-354. http://d.old.wanfangdata.com.cn/Periodical/zdhxb200704003 [13] LEICHTER I, LINDENBAUM M, RIVLIN E. Mean shift tracking with multiple reference color histograms[J]. Computer Vision and Image Understanding, 2010, 114(3):400-408. doi: 10.1016-j.cviu.2009.12.006/ [14] 邹青志, 黄山.一种基于Mean Shift的快速跟踪算法[J].计算机科学, 2017, 44(3):278-282. http://d.old.wanfangdata.com.cn/Periodical/jsjkx201703057 ZHOU Qing-zhi, HUANG Shan. Fast tracking algorithm based on Mean Shift algorithm[J]. Computer Science, 2017, 44(3):278-282. http://d.old.wanfangdata.com.cn/Periodical/jsjkx201703057 [15] NING J, ZHANG L, ZHANG D, et al. Robust mean-shift tracking with corrected background-weighted histogram[J]. IET Computer Vision, 2012, 6(1):62-69. doi: 10.1049/iet-cvi.2009.0075 [16] 王晓卫, 王旭东, 贺明.基于直方图比的背景加权的Mean Shift目标跟踪算法[J].强激光与粒子束, 2016, 28(5):19-23. http://d.old.wanfangdata.com.cn/Periodical/qjgylzs201605004 WANG Xiao-wei, WANG Xu-dong, HE Ming. Target tracking algorithm based on Mean Shift and histogram ratio background weighted[J]. High Power Laser and Particle Beams, 2016, 28(5):19-23. http://d.old.wanfangdata.com.cn/Periodical/qjgylzs201605004 [17] 马加庆, 韩崇昭.一种多线索融合的均值偏移跟踪算法[J].西安交通大学学报, 2009, 43(10):42-46. http://d.old.wanfangdata.com.cn/Periodical/xajtdxxb200910009 MA Jia-qing, HAN Chong-zhao. A Mean Shift tracking algorithm based on muti-cue fusion[J]. Journal of Xi'an Jiaotong University, 2009, 43(10):42-46. http://d.old.wanfangdata.com.cn/Periodical/xajtdxxb200910009 [18] 左军毅, 梁彦, 赵春晖, 等. Mean Shift跟踪算法中尺度自适应策略的研究[J].中国图象图形学报, 2008, 13(9):1750-1757. http://d.old.wanfangdata.com.cn/Periodical/zgtxtxxb-a200809020 ZUO Jun-yi, LIANG Yan, ZHAO Chun-hui, et al. Researches on scale adaptation strategy in Mean Shift tracking algorithm[J]. Journal of Image and Graphics, 2008, 13(9):1750-1757. http://d.old.wanfangdata.com.cn/Periodical/zgtxtxxb-a200809020 -

 点击查看大图
点击查看大图

图(5) / 表(2)
计量
- 文章访问数: 4458
- HTML全文浏览量: 1619
- PDF下载量: 103
- 被引次数: 0
