 ISSN
ISSN 


-
杂波环境下的多目标跟踪是目标跟踪领域中的热点和难点问题之一[1-3],其关键在于解决量测来源的不确定性,即首先要确认量测点迹是来自于杂波还是目标,以及是来自于哪一个目标。目前比较具有代表性的适合工程应用的多目标跟踪算法包括多假设检验(multiple hypothesis test, MHT)[4]和联合概率数据关联(joint probabilistic data association, JPDA)等算法[5]。MHT方法由于过多地依赖于目标和杂波的先验知识,如虚警回波数、新目标回波数和虚假目标密度等,实际跟踪性能不太理想[5]。JPDA算法则没有过多地依赖于先验信息,其利用关联波门内的所有量测计算加权残差用于航迹更新,是杂波环境下对多目标进行数据关联的有效算法[6-7]。但是传统JPDA算法仅利用目标的位置信息进行数据关联,当目标个数较多或者量测点迹较多时,将出现组合爆炸、计算量呈指数增长等问题,无法满足工程应用的实时性要求[8-9]。
脉冲多普勒(pulse Doppler, PD)雷达可以通过动目标检测(moving target detection, MTD)的方式测量目标的速度信息。利用多普勒(速度)信息辅助跟踪过程中的数据关联和状态估计,将有效提升杂波环境下多目标跟踪的数据关联效率和目标跟踪精度[10-11]。而线性调频(linearly modulated frequency, LFM)信号具有良好的脉冲压缩特性和多普勒容忍性,是PD雷达最常用的发射波形[12]。当雷达发射LFM信号时,利用多普勒信息辅助目标跟踪需要重点考虑两个方面的问题:1)径向速度观测量的非线性问题。由于径向速度是在极坐标系中获得的,而目标的位置、速度等状态信息一般需要在直角坐标系中进行滤波和估计,因此速度观测量与目标状态估计之间呈现非线性的关系。常用的非线性滤波方法包括扩展卡尔曼滤波(extended Kalman filter, EKF)、不敏卡尔曼滤波(unscented Kalman filter, UKF)和粒子滤波等[1, 4];2)距离观测量与速度观测量之间的相关性问题。文献[13]将目标径向速度的观测信息引入卡尔曼滤波器,提出了一种序贯滤波算法,即首先对目标的位置信息进行卡尔曼滤波,然后通过构造伪量测对距离和速度进行去相关,并通过EKF对目标状态进行更新。该文献详细讨论了利用速度信息对目标跟踪精度带来的提升效果,但是面向的是单目标跟踪背景,并没有考虑杂波和多目标的跟踪环境。文献[14]则针对杂波环境下的多目标跟踪问题,分别基于递归处理的综合概率数据关联(integrated probabilistic data association, IPDA)算法和批处理的综合航迹分离(integrated track splitting, ITS)算法,讨论了引入速度信息后数据关联性能的提升效果。但是该文献所提算法并没有利用速度信息进行量测点迹的筛选和判决,而仅利用速度计算数据关联概率等参数,速度信息没有得到充分利用。文献[15]考虑了距离和速度观测之间的相关性,同样构造伪量测值进行去相关,并基于高斯和形式的目标跟踪算法(包括IPDA和ITS等)验证了引入多普勒信息在数据关联效率和目标跟踪精度两方面带来的提升效果。但是这种通过构造伪量测状态对目标距离和速度进行去相关的方法在应用于密集杂波环境下的目标跟踪场景时,需要构造每一个多普勒观测点的伪量测状态,去相关后要重新计算伪量测噪声的协方差,这在很大程度上增加了算法的计算量和复杂性。而且现有研究表明,合理利用距离与速度之间的相关性在一定程度上可以提高目标跟踪精度,但是具体如何利用这种相关性尚不明确,而且现有文献也没有给出引入速度观测信息后的具体数据关联方法。
针对这些问题,本文面向密集杂波环境下的多目标跟踪背景,提出一种多普勒信息辅助的多维关联波门构建方法,并基于IPDA-UKF算法框架分别对引入和不引入多普勒信息,以及去相关和不去相关条件下的目标跟踪性能进行了详细对比。本文算法的结构更为简单,更加利于工程实现,对多普勒信息的利用也更充分。理论分析和仿真结果表明,合理利用距离与速度之间的相关性可以提高数据关联效率和目标跟踪精度。
-
将雷达在k时刻接收到的观测点迹集合表示为${{\mathit{\boldsymbol{Z}}}_k}$。其中的点迹有可能来源于真实目标,也有可能来源于杂波。本节给出目标和杂波的观测模型。
-
假设跟踪区域中有J个目标,第j(j =1, 2, …, J)个目标在二维平面内的状态模型为:
$${\mathit{\boldsymbol{x}}}_{k + 1}^j = {\mathit{\boldsymbol{F}}}_{k + 1|k}^j{\mathit{\boldsymbol{x}}}_k^j + {\mathit{\boldsymbol{w}}}_k^j$$ (1) 式中,目标状态向量${\mathit{\boldsymbol{x}}}_k^j = {[\begin{array}{*{20}{c}} {x_k^j}&{\dot x_k^j}&{y_k^j}&{\dot y_k^j} \end{array}]^{\rm{T}}}$,包括目标j在x方向上的位置${x_k}$和速度${\dot x_k}$,以及在y方向上的位置${y_k}$和速度${\dot y_k}$。状态转移矩阵为:
$${\mathit{\boldsymbol{F}}}_{k + 1|k}^j = {{\mathit{\boldsymbol{I}}}_2} \otimes \left[ {\begin{array}{*{20}{c}} 1&{\Delta t} \\ 0&1 \end{array}} \right]$$ (2) 式中,${{\mathit{\boldsymbol{I}}}_2}$为2维单位矩阵;$ \otimes $代表Kronecher积;$\Delta t$为观测间隔。状态噪声${\mathit{\boldsymbol{w}}}_k^j$~$N(0, {\mathit{\boldsymbol{Q}}}_k^j)$,其中:
$${\mathit{\boldsymbol{Q}}}_k^j = {{\mathit{\boldsymbol{I}}}_2} \otimes q_k^j\left[ {\begin{array}{*{20}{c}} {{{\Delta {t^3}} \mathord{\left/ {\vphantom {{\Delta {t^3}} 3}} \right. } 3}}&{{{\Delta {t^2}} \mathord{\left/ {\vphantom {{\Delta {t^2}} 2}} \right. } 2}} \\ {{{\Delta {t^2}} \mathord{\left/ {\vphantom {{\Delta {t^2}} 2}} \right. } 2}}&{\Delta t} \end{array}} \right]$$ (3) 式中,$q_k^j$为状态噪声强度,用来表征状态模型与目标实际运动状态的差别[16]。
假设雷达位于原点位置并保持静止,观测点迹集合${{\mathit{\boldsymbol{Z}}}_k}$中的每一个观测向量${{\mathit{\boldsymbol{z}}}_k}$都包含方位角${\theta _k}$、径向距离${r_k}$和径向速度${\dot r_k}$等3个状态信息,即:
$${{\mathit{\boldsymbol{z}}}_k} = {[\begin{array}{*{20}{c}} {\begin{array}{*{20}{c}} {{\theta _k}}&{{r_k}} \end{array}}&{{{\dot r}_k}} \end{array}]^{\rm{T}}}$$ (4) 那么目标j的观测向量${\mathit{\boldsymbol{z}}}_k^j$可表示为状态向量${\mathit{\boldsymbol{x}}}_k^j$的非线性函数,即:
$${\mathit{\boldsymbol{z}}}_k^j = \operatorname{h} ({\mathit{\boldsymbol{x}}}_k^j) + {\mathit{\boldsymbol{v}}}_k^j = \left[ {\begin{array}{*{20}{c}} {\arctan \left( {\frac{{y_k^j}}{{x_k^j}}} \right)} \\ {\sqrt {{{(x_k^j)}^2} + {{(y_k^j)}^2}} } \\ {\frac{{x_k^j\dot x_k^j + y_k^j\dot y_k^j}}{{\sqrt {{{(x_k^j)}^2} + {{(y_k^j)}^2}} }}} \end{array}} \right] + {\mathit{\boldsymbol{v}}}_k^j$$ (5) 式中,观测噪声${\mathit{\boldsymbol{v}}}_k^j$~$N(\mathit{\boldsymbol{0}}, {\mathit{\boldsymbol{R}}}_k^j)$,${\mathit{\boldsymbol{R}}}_k^j$为第j个目标的观测噪声协方差,即:
$${\mathit{\boldsymbol{R}}}_k^j = \left[ {\begin{array}{*{20}{c}} {\sigma _\theta ^2}&0&0 \\ 0&{\sigma _r^2}&{\rho {\sigma _r}{\sigma _v}} \\ 0&{\rho {\sigma _r}{\sigma _v}}&{\sigma _v^2} \end{array}} \right]$$ (6) 式中,方位角${\theta _k}$与径向距离${r_k}$和径向速度${\dot r_k}$都不相关,其观测噪声方差为$\sigma _\theta ^2$;径向距离${r_k}$的观测噪声方差为$\sigma _r^2$,径向速度${\dot r_k}$的观测噪声方差为$\sigma _v^2$,二者的相关系数为$\rho $。那么观测向量${\mathit{\boldsymbol{z}}}_k^j$的概率密度函数(probability density function, PDF)可表示为[15]:
$$\begin{gathered} p(\theta _k^j, r_k^j, \dot r_k^j|{\mathit{\boldsymbol{x}}}_k^j) = p(\theta _k^j|{\mathit{\boldsymbol{x}}}_k^j)p(r_k^j, \dot r_k^j|{\mathit{\boldsymbol{x}}}_k^j) = \\ N({\mathit{\boldsymbol{z}}}_k^j;\operatorname{h} ({\mathit{\boldsymbol{x}}}_k^j), {\mathit{\boldsymbol{R}}}_k^j) \\ \end{gathered} $$ (7) -
假设每一帧回波内的杂波点在空间区域和多普勒域都服从均匀分布。每一个杂波点的观测量也同样包含方位角、径向距离和径向速度信息,并且杂波的位置观测量与速度观测量是相互独立的,与目标的运动状态无关[15]。那么杂波的概率密度函数可表示为其空间位置分布的PDF与多普勒观测的PDF的乘积,即:
$${p^c}({\theta _k}, {r_k}, {\dot r_k}) = {p^c}({\theta _k}, {r_k}){p^c}({\dot r_k})$$ (8) 式中,${p^c}({\theta _k}, {r_k})$为杂波空间位置分布的PDF;${p^c}({\dot r_k})$为杂波多普勒观测的PDF。假设二者均为先验已知,或者由过去的观测量估计得到[17]。
-
位置和多普勒属于目标和杂波在不同维度的运动状态信息,二者具有不同的属性和变化规律。将多普勒加入到观测状态向量中,构建多维关联波门,利用目标和杂波在位置和多普勒方面的差异剔除无关量测点迹,筛选出各个目标的有效量测,从而将一个多目标数据关联问题转化为多个单目标数据关联的问题,这样可以有效降低跟踪算法的计算量,提高数据关联的正确率和目标跟踪精度。
-
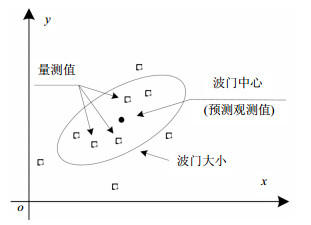
关联波门是数据关联的重要底层支持技术,目标跟踪过程中只有进入关联波门的量测点迹才能成为候选回波。传统的关联波门仅利用目标的位置预测信息,确定其量测值在下一时刻出现的范围。如图 1所示,将雷达在极坐标系下获得的观测值转换到直角坐标系后,便可以利用椭圆关联波门对转换后的量测值进行确认[18]。但是在杂波密集区域,进入关联波门内的点迹较多,数据关联的运算量将会增大,产生虚假航迹的概率也将增大。而且当两个或多个目标的航迹接近或者交叉时,相邻目标的关联波门将会重叠,如果量测点迹落入重叠区域,就有可能出现航迹合并,甚至误跟、失跟的情况。

图 1 传统关联波门的示意图
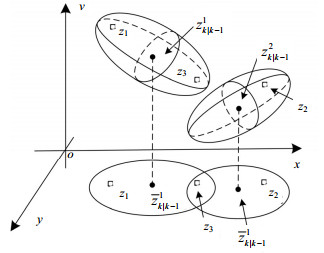
将多普勒信息加入到目标的观测向量中,构建多维关联波门,利用目标和杂波在多普勒方面的差异可以将大量无关点迹剔除,也可以对重叠区域的量测点迹进行确认。如图 2所示,仅用位置信息进行数据关联时,量测点迹${{\mathit{\boldsymbol{z}}}_3}$位于目标1和2关联波门的重叠区域,而利用多普勒信息便可以将${{\mathit{\boldsymbol{z}}}_3}$关联给目标1。因此,关联波门的设计直接影响数据关联的性能,进而影响目标的跟踪精度。

图 2 多维关联波门进行数据关联的示意图
由式(5)可知,观测模型的非线性程度较高,本文选用滤波精度较好的UKF算法[1, 4]。利用不敏变换(unscented transformation, UT)可以得到目标j的多维关联波门中心,即观测状态的预测值:
$$ {\mathit{\boldsymbol{z}}}_{k|k - 1}^j = \sum\limits_{i = 1}^{2{n_x} + 1} {{W^i}h(\xi _k^{j, i})} ~~~i=1, 2, …, ~~2{n_x} + 1 $$ (9) 式中,${n_x}$为状态向量的维数,${n_x} = 4$;$\xi _k^{j, i}$和${W^i}$分别为采用不敏变换得到的目标j预测状态的采样点和相应权值[1, 4]。各个目标的有效量测分别采用多维关联波门予以确认,那么目标j的有效量测集合为:
$$ \begin{array}{c} {\mathit{\boldsymbol{Z}}}_k^j = \{ {\mathit{\boldsymbol{z}}}_k^{j, i}|{({\mathit{\boldsymbol{z}}}_k^{j, i} - {\mathit{\boldsymbol{z}}}_{k|k - 1}^j)^{\rm{T}}}{({\mathit{\boldsymbol{S}}}_k^j)^{ - 1}}({\mathit{\boldsymbol{z}}}_k^{j, i} - {\mathit{\boldsymbol{z}}}_{k|k - 1}^j) \leqslant {\gamma ^j}\} \\i=1, 2, …, m_k^j \end{array} $$ (10) 式中,${\mathit{\boldsymbol{z}}}_k^{j, i}$为落入目标j关联波门的第i个量测点;${\mathit{\boldsymbol{z}}}_{k|k - 1}^j$由式(9)给出,这两个向量都包括方位角、径向距离和径向速度信息,即数据关联过程是在极坐标系内完成的;${\gamma ^j}$为判别门限,可由χ2分布表根据量测落入关联波门的概率${P_{\rm{G}}}$查得;${\mathit{\boldsymbol{S}}}_k^j$为新息序列的协方差,利用不敏变换计算可得:
$$ {\mathit{\boldsymbol{S}}}_k^j = {\mathit{\boldsymbol{R}}}_k^j + \sum\limits_{i = 1}^{2{n_x} + 1} {{W^i}[h(\xi _k^{j, i}) - {\mathit{\boldsymbol{z}}}_{k|k - 1}^j]{{[h(\xi _k^{j, i}) - {\mathit{\boldsymbol{z}}}_{k|k - 1}^j]}^{\rm{T}}}} $$ (11) $$V_k^j = {c_{{n_z}}}{\gamma ^{{{{n_z}} \mathord{\left/ {\vphantom {{{n_z}} 2}} \right. } 2}}}|{\mathit{\boldsymbol{S}}}_k^j{|^{{1 \mathord{\left/ {\vphantom {1 2}} \right. } 2}}}$$ (12) 式中,${c_{{n_z}}}$由观测向量的维数${n_z}$决定,这里${n_z} = 3$,${c_{{n_z}}} = {{4\pi } \mathord{\left/ {\vphantom {{4\pi } 3}} \right. } 3}$。由式(6)和式(11)可知,距离与速度观测量之间的相关性体现在观测噪声协方差${\mathit{\boldsymbol{R}}}_k^j$上,而关联波门的大小与${\mathit{\boldsymbol{S}}}_k^j$有关,因此多维关联波门可以充分利用距离与速度之间的相关性。
-
多目标跟踪问题就是根据当前和过去的雷达观测序列${{\mathit{\boldsymbol{Z}}}^k}$估计每个目标当前时刻联合状态(包括运动状态${\mathit{\boldsymbol{x}}}_k^j$和存在状态$\chi _k^j$)的后验PDF,即:
$$p({\mathit{\boldsymbol{x}}}_k^j, \chi _k^j|{{\mathit{\boldsymbol{Z}}}^k}) = p(\chi _k^j|{{\mathit{\boldsymbol{Z}}}^k})p({\mathit{\boldsymbol{x}}}_k^j|\chi _k^j, {{\mathit{\boldsymbol{Z}}}^k})$$ (13) 式中,$\chi _k^j$为目标存在状态变量,$\chi _k^j \in \{ 1, 0\} $,1和0分别表示目标存在和不存在事件,其服从一阶Markov状态转移模型;${{\mathit{\boldsymbol{Z}}}^k}$表示k时刻和k时刻之前的观测序列集合,即${{\mathit{\boldsymbol{Z}}}^k} = \{ {{\mathit{\boldsymbol{Z}}}_1}, {{\mathit{\boldsymbol{Z}}}_2}, \cdots , {{\mathit{\boldsymbol{Z}}}_k}\} $。
在给定目标先验存在概率$P(\chi _{k - 1}^j|{{\mathit{\boldsymbol{Z}}}^{k - 1}})$和先验运动状态PDF$p({\mathit{\boldsymbol{x}}}_{k - 1}^j|\chi _{k - 1}^j, {{\mathit{\boldsymbol{Z}}}^{k - 1}})$的条件下,联合状态的后验PDF可以通过状态预测、量测筛选、计算目标观测状态的预测PDF和状态更新等4个步骤进行估计,具体过程如下:
1) 预测联合状态的PDF
基于一阶Markov状态转移模型,目标存在状态概率的预测值为:
$$\begin{gathered} P(\chi _{_k}^j|{{\mathit{\boldsymbol{Z}}}^{k - 1}}) = {\pi _{1, 1}}P(\chi _{k - 1}^j|{{\mathit{\boldsymbol{Z}}}^{k - 1}}) + \\ {\pi _{2, 1}}[1 - P(\chi _{k - 1}^j|{{\mathit{\boldsymbol{Z}}}^{k - 1}})] \\ \end{gathered} $$ (14) 式中,${\pi _{i, j}}$(i, j=1, 2)表示Markov链的状态转移矩阵的第(i, j)个元素。
目标运动状态的预测PDF为:
$$p({\mathit{\boldsymbol{x}}}_k^j|\chi _k^j, {{\mathit{\boldsymbol{Z}}}^{k - 1}}) = N({\mathit{\boldsymbol{x}}}_k^j;{\mathit{\boldsymbol{x}}}_{k|k - 1}^j, {\mathit{\boldsymbol{P}}}_{k|k - 1}^j)$$ (15) 式中,${\mathit{\boldsymbol{x}}}_{k|k - 1}^j$和${\mathit{\boldsymbol{P}}}_{k|k - 1}^j$分别为目标运动状态的预测均值和预测误差协方差。
2) 有效量测筛选
在极坐标系内,利用基于位置-速度的多维关联波门对k时刻的量测点迹集合${{\mathit{\boldsymbol{Z}}}_k}$进行筛选:
$$ {({\mathit{\boldsymbol{z}}}_k^{j, i} - {\mathit{\boldsymbol{z}}}_{k|k - 1}^j)^{\rm{T}}}{({\mathit{\boldsymbol{S}}}_k^j)^{ - 1}}({\mathit{\boldsymbol{z}}}_k^{j, i} - {\mathit{\boldsymbol{z}}}_{k|k - 1}^j) \leqslant {\gamma ^j}~~~ i=1, 2, …, m_k^j $$ (16) 式中,$m_k^j$为目标j关联波门内的量测点迹个数,即有效量测的数目。
3) 计算目标观测状态的预测PDF
考虑目标径向距离和径向速度之间的相关性,目标观测状态的预测PDF为:
$$\begin{gathered} p({\mathit{\boldsymbol{z}}}_k^{j, i}|\chi _k^j, {{\mathit{\boldsymbol{Z}}}^{k - 1}}) = p(\theta _k^{j, i}, r_k^{j, i}, \dot r_k^{j, i}|\chi _k^j, {{\mathit{\boldsymbol{Z}}}^{k - 1}}) = \\ N({\mathit{\boldsymbol{z}}}_k^{j, i};{\mathit{\boldsymbol{z}}}_{k|k - 1}^j, {\mathit{\boldsymbol{S}}}_k^j) \\ \end{gathered} $$ (17) 式中,${\mathit{\boldsymbol{z}}}_{k|k - 1}^j$由式(9)给出,${\mathit{\boldsymbol{S}}}_k^j$由式(11)给出。
4) 联合状态的PDF更新
目标j的存在概率的后验估计为[14]:
$$P(\chi _k^j|{{\mathit{\boldsymbol{Z}}}^k}) = \frac{{(1 - \delta _k^j)P(\chi _k^j|{{\mathit{\boldsymbol{Z}}}^{k - 1}})}}{{1 - \delta _k^jP(\chi _k^j|{{\mathit{\boldsymbol{Z}}}^{k - 1}})}}$$ (18) 式中,数据关联因子定义为:
$$\delta _k^j = {P_{\rm{D}}}{P_{\rm{G}}}\left( {1 - \sum\limits_{i = 1}^{_{m_k^j}} {\frac{{\Lambda _k^{j, i}}}{{\rho _k^i}}} } \right)$$ (19) 式中,${P_{\rm{D}}}$为目标检测概率;${P_{\rm{G}}}$为量测点迹落入关联波门的概率;$\Lambda _k^{j, i}$为联合观测状态的似然函数,即第i个量测属于目标j的条件下目标观测状态的预测PDF,即为式(17);杂波密度$\rho _k^i$由式(8)给出。由于似然函数$\Lambda _k^i$中有多普勒信息的参与,因此多普勒信息也会影响到目标存在概率的最终估计。
目标j的运动状态PDF的后验估计为:
$$p(\left. {{\mathit{\boldsymbol{x}}}_k^j} \right|\chi _k^j, {{\mathit{\boldsymbol{Z}}}^k}) = \sum\limits_{i = 0}^{m_k^j} {P(\left. {\vartheta _k^{j, i}} \right|\chi _k^j, {{\mathit{\boldsymbol{Z}}}^k})p(\left. {{\mathit{\boldsymbol{x}}}_k^j} \right|\chi _k^j, \vartheta _k^{j, i}, {{\mathit{\boldsymbol{Z}}}^k})} =\\\sum\limits_{i = 0}^{m_k^j} {\beta _k^{j, i}p(\left. {{\mathit{\boldsymbol{x}}}_k^j} \right|\chi _k^j, \vartheta _k^{j, i}, {{\mathit{\boldsymbol{Z}}}^k})} = N({\mathit{\boldsymbol{x}}}_k^j, {\mathit{\boldsymbol{x}}}_{k|k}^j, {\mathit{\boldsymbol{P}}}_{k|k}^j)$$ (20) 式中,$\vartheta _k^{j, i}$表示第i个量测点迹属于目标j,而其余量测均为杂波的事件;$\beta _k^{j, i}$表示第i个量测点迹的关联概率,可表示为[21]:
$$\begin{gathered} \beta _k^{j, i} = P(\left. {\vartheta _k^{j, i}} \right|\chi _k^j, {{\mathit{\boldsymbol{Z}}}^k}) = \frac{{P(\left. {\chi _k^j, \vartheta _k^{j, i}} \right|{{\mathit{\boldsymbol{Z}}}^k})}}{{P(\left. {\chi _k^j} \right|{{\mathit{\boldsymbol{Z}}}^k})}} = \\ \frac{1}{{1 - \delta _k^j}}\left\{ \begin{gathered} 1 - {P_{\rm{D}}}{P_{\rm{G}}}{\rm{ }}i{\rm{ = 0}} \\ {P_{\rm{D}}}{P_{\rm{G}}}\frac{{\Lambda _k^{j, i}}}{{\rho _k^i}}{\rm{ }}i{\rm{ > 0}} \\ \end{gathered} \right. \\ \end{gathered} $$ (21) -
参照文献[14-15]的仿真实验,以二维杂波场景中航迹发生交叉的3个匀速直线运动目标为跟踪对象,将以下算法进行性能对比:IPDA算法(仅利用位置信息进行数据关联的IPDA算法)、D-IPDA算法(利用多普勒信息辅助数据关联,但不考虑距离与速度之间的相关性)、DCD-IPDA算法(通过构造伪量测对距离和速度进行去相关,并利用多普勒信息辅助数据关联)与CD-IPDA算法(对距离和速度不去相关,利用多维关联波门进行数据关联,即本文算法),并且4种算法中的非线性滤波均采用UKF进行,航迹起始采用基于3/4的修正逻辑起始算法[4]。
雷达观测场景:3个目标在62~65 s发生航迹交叉。杂波的空间位置服从均匀分布,杂波密度为2×10-4/m2,具体产生方法详见文献[4],杂波的多普勒观测值在(-10 m/s, 10 m/s)范围内服从均匀分布。
算法参数设置:目标运动模型中状态噪声强度$q_k^j = 0.01$(j=1, 2, 3),雷达对3个目标的径向距离观测误差标准差为100 m,方位角观测误差标准差为0.03 rad。观测间隔$\Delta t$=1 s,观测时间100 s。目标检测概率PD=0.9,门概率PG=0.971,由门概率PG和量测维数${n_{\mathit{\boldsymbol{z}}}} = 3$查表可得门限${\gamma ^j} = 9$(j=1, 2, 3)。目标径向速度的观测精度在${\sigma _v} = 5$,$10{\rm{ m/s}}$两种情况下考虑,距离观测量与速度观测量的相关系数为$\rho = 0.9$。
算法性能分别从确认的真实航迹数目(number of confirmed true tracks, NCTT)和确认的虚假航迹数目(number of confirmed false tracks, NCFT)、运行时间以及跟踪精度等方面评估。其中真实航迹和虚假航迹的确认规则与文献[15]相同,即利用确认门限和终止门限对目标存在概率进行判决。目标j位置估计的均方根误差(root mean square error, RMSE)定义为:
$$\sigma _r^j = \sqrt {\frac{1}{N}\sum\limits_{i = 1}^N {{{(x_{k|k}^{j, i} - x_k^j)}^2}} + \frac{1}{N}\sum\limits_{i = 1}^N {{{(y_{k|k}^{j, i} - y_k^j)}^2}} } $$ (22) 式中,$(x_k^j, y_k^j)$为k时刻目标j的真实位置;$(x_{k|k}^{j, i}, y_{k|k}^{j, i})$为第i次Monte-Carlo实验目标j的位置估计值;N为Monte-Carlo实验次数。
表 1对比了测速精度为5 m/s时本文算法和传统算法的各项跟踪性能指标。其中运行时间为各算法进行单次Monte-Carlo实验的平均运行时间。计算机仿真环境为:3.2 GHz主频,4 GB内存,Windows 7操作系统,Matlab R2008b仿真环境。从表中数据可以看出,相比仅利用位置信息的IPDA算法,其他算法的数据关联效率和关联质量明显提高。这是由于利用多普勒信息辅助数据关联后,关联波门内的杂波点数大大减少,数据关联的计算量也随之降低,获取真实量测的概率得到了提高。而D-IPDA算法在利用多普勒信息时,没有考虑距离和速度之间的相关性,造成算法参数的设置(如观测噪声的协方差、虚假航迹的判别门限等)与实际观测场景不符,从而导致虚假航迹的产生。DCD-IPDA算法在利用多普勒信息时,需要将所有的量测点迹进行去相关操作,然后分别利用位置和速度信息进行数据关联。此算法虽然可以控制虚假航迹的数量,但是利用伪量测进行数据关联的过程较为繁琐,尤其当杂波点较为密集时,计算量非常大。CD-IPDA算法则考虑了距离和速度之间的相关性,利用位置和速度信息构建多维关联波门,在极坐标系内直接对量测点迹进行综合筛选,获取真实量测的概率得到了提高,因此本文算法在数据关联方面的优势较为明显。
表 1 当${\sigma _v} = 5{\rm{ m/s}}$时,不同算法的跟踪性能比较
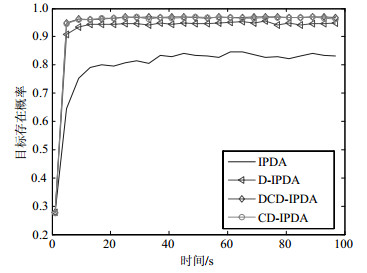
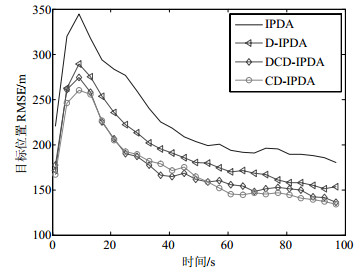
算法 运行时间/ms NCTT NCFT IPDA 732.48 9 12 D-IPDA 97.94 6 2 DCD-IPDA 501.36 4 2 CD-IPDA 84.39 3 0 以目标1为例,图 3和图 4分别给出了本文算法与传统算法的目标存在概率和跟踪精度的对比结果,其中跟踪精度只针对确认的真实航迹进行计算。另外两个目标的对比结果相似,限于篇幅,予以省略。利用多普勒信息辅助数据关联后,目标存在概率和跟踪精度都得到了明显提高。本文算法在利用多普勒信息时,综合考虑了多普勒的观测非线性以及其与距离观测之间的相关性,利用位置和多普勒信息构建多维关联波门,完成有效量测的筛选,在数据关联效率和目标跟踪精度两方面兼具优势。实际上,数据关联性能与目标跟踪精度是相辅相成,互相提高的。一方面,当数据关联的效率和正确率提高时,无关点迹减少,获得目标真实观测量的概率提高,目标运动状态的观测精度提高,那么目标的跟踪精度也将随之提高。另一方面,在目标运动状态不发生变化的情况下,当目标的跟踪精度提高后,关联波门将会随着滤波算法的递归过程逐渐缩小,关联波门内的杂波点数也将减少,数据关联的效率进而得到提高。

图 3 不同跟踪算法对目标1的存在概率估计对比

图 4 不同跟踪算法对目标1的跟踪精度对比
-
本文综合考虑引入多普勒信息后观测方程的非线性,以及速度观测与距离观测之间的相关性等问题,基于IPDA-UKF框架构建多维关联波门,对量测点迹进行综合筛选,并完成目标联合状态的估计。仿真结果表明,相比其他算法,本文算法可以降低算法的计算量,减少虚假航迹数目,提高数据关联效率和目标跟踪精度,对实际工程应用具有一定的参考价值。
如何更加充分有效地利用目标的多普勒信息,关键在于非线性滤波算法,因此结合多普勒的非线性特点,提出滤波精度更高的滤波算法是下一步需要研究的问题。
Multi-Target Tracking in Clutter Aided by Doppler Information
-
摘要: 传统雷达目标跟踪方法仅利用目标的位置信息进行数据关联,在处理密集杂波环境下的多目标跟踪问题时,容易产生虚假航迹,甚至出现误跟、失跟的现象。该文针对此问题提出一种多普勒信息辅助的杂波环境下多目标跟踪算法。首先引入多普勒信息带来的观测方程非线性,以及速度观测与距离观测之间的相关性问题,基于IPDA-UKF算法框架,综合利用目标的位置和速度信息构建多维关联波门,利用多维信息进行有效量测的筛选,从而将一个多目标数据关联的问题转化为多个单目标数据关联的问题,然后采用IPDA-UKF分别估计各个目标的存在概率和运动状态。仿真结果表明:相比其他算法,该算法充分利用距离和速度之间的相关性,不仅降低了杂波环境下多目标数据关联的复杂度,提高了数据关联的效率,而且目标跟踪精度也得到了明显提升。Abstract: The traditional radar target tracking methods only utilize the information of target position to finish data association. When these methods are used to deal with the problem of multi-target tracking in the dense clutter, it is easy to generate the false tracks or even to lose tracks. Aiming at this problem, a multi-target tracking algorithm aided by Doppler information is proposed in this paper. The problems of the nonlinear measurement and the correlation relationship between range and Doppler measurements are considered in the proposed algorithm. Firstly, the multi-dimension correlating gate is constructed with the information of target position and velocity based on the frame of integrated probabilistic data association and unscented Kalman filter (IPDA-UKF). The data association is accomplished with the multi-dimension information. So the problem of multi-target data association is simplified to multiple sub-problems consisting of a single target data association. Secondly, the existing probability and motion state of each target are estimated by the IPDA-UKF algorithm respectively. The simulation results and comparison with the other algorithms reveal that the proposed algorithm has reduced the computing complexity of multi-target data association, and improved the efficiency of data association by using the correlation between range and Doppler measurement completely on the one hand. On the other hand, the tracking accuracy is also improved by the aid of Doppler information.
-
表 1 当${\sigma _v} = 5{\rm{ m/s}}$时,不同算法的跟踪性能比较
算法 运行时间/ms NCTT NCFT IPDA 732.48 9 12 D-IPDA 97.94 6 2 DCD-IPDA 501.36 4 2 CD-IPDA 84.39 3 0  下载: 导出CSV
下载: 导出CSV
-
[1] CHALLA S, MORELANDE M R, MUSICKI D, et al. Fundamentals of object tracking[M]. Cambridge:Cambridge University Press, 2011. [2] NIEDFELDT P C, BEARD R W. Convergence and complexity analysis of recursive-RANSAC:A new multiple target tracking algorithm[J]. IEEE Transactions on Automatic Control, 2016, 61(2):456-461. http://cn.bing.com/academic/profile?id=b4382a02b49fc2469b407f2666cc4a9d&encoded=0&v=paper_preview&mkt=zh-cn [3] UBEDA-MEDINA L, ÁNGEL G F, GRAJAL J. Adaptive auxiliary particle filter for track-before-detect with multiple targets[J]. IEEE Transactions on Aerospace & Electronic Systems, 2017, 53(5):2317-2330. http://cn.bing.com/academic/profile?id=3e6983746608e30498bc3b696f6c86c6&encoded=0&v=paper_preview&mkt=zh-cn [4] 何友, 修建娟, 张晶炜, 等.雷达数据处理及应用[M]. (第3版).北京:电子工业出版社, 2011. HE You, XIU Jian-juan, ZHANG Jing-wei, et al. Radar data processing with applications[M]. 3rd ed. Beijing:Publishing House of Electronics Industry, 2011. [5] BAR-SHALOM Y, DAUM F, HUANG J. The probabilistic data association filter:Estimation in the presence of measurement origin uncertainty[J]. IEEE Control Systems Magzine, 2012, 29(6):82-100. [6] VIVONE G, BRACA P. Joint probabilistic data association tracker for extended target tracking applied to X-band marine radar data[J]. IEEE Journal of Oceanic Engineering, 2016, 41(4):1007-1019. doi: 10.1109/JOE.2015.2503499 [7] XU T, THARMARASA R, MCDONALD M, et al. Multiple detection-aided low-observable track initialization using ML-PDA[J]. IEEE Transactions on Aerospace & Electronic Systems, 2017, 53(2):722-735. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=e33ba9a1b3a1ef57e15a4ed49ba831d7 [8] XIE Y, HUANG Y, SONG T L. Iterative joint integrated probabilistic data association filter for multiple-detection multiple-target tracking[J]. Digital Signal Processing, 2018, 72:232-243. doi: 10.1016/j.dsp.2017.10.020 [9] 王芝, 徐晓滨, 刘伟峰, 等.两类典型多目标跟踪算法性能分析与比较[J].电子与信息学报, 2010, 32(7):1633-1637. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=dzkxxk201007020 WANG Zhi, XU Xiao-bin, LIU Wei-feng, et al. Performance analysis and comparison of two classic algorithms in multi-target tracking[J]. Journal of Electronics & Information Technology, 2010, 32(7):1633-1637. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=dzkxxk201007020 [10] YEOM S W, KIRUBARAJAN T, BAR-SHALOM Y. Track segment association, fine-step IMM and initialization with Doppler for improved track performance[J]. IEEE Transactions on Aerospace & Electronic Systems, 2004, 40(1):293-309. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=9142ce3849512c7a351440997f26f093 [11] GURFIL P, JEREMY K N. Two-step optimal estimator for three dimensional target tracking[J]. IEEE Transactions on Aerospace & Electronic Systems, 2005, 41(3):780-793. http://cn.bing.com/academic/profile?id=26db30e41a272fb51650f252ea038aa7&encoded=0&v=paper_preview&mkt=zh-cn [12] 靳标, 纠博, 苏涛, 等.针对机动目标跟踪的雷达发射波形选择[J].电子与信息学报, 2014, 36(8):1912-1918. http://d.old.wanfangdata.com.cn/Periodical/dzkxxk201408021 JIN Biao, JIU Bo, SU Tao, et al. Radar transmitted waveform selection for maneuvering target tracking[J]. Journal of Electronics & Information Technology, 2014, 36(8):1912-1918. http://d.old.wanfangdata.com.cn/Periodical/dzkxxk201408021 [13] WANG J, HE P, LONG T. Use of the radial velocity measurement in target tracking[J]. IEEE Transactions on Aerospace & Electronic Systems, 2003, 39(2):401-413. http://cn.bing.com/academic/profile?id=1df7b043287b1f797d219c90a0b524a4&encoded=0&v=paper_preview&mkt=zh-cn [14] WANG X, MUSICKI D, ELLEM R, et al. Efficient and enhanced multi-target tracking with Doppler measurements[J]. IEEE Transactions on Aerospace & Electronic Systems, 2009, 45(4):1400-1417. http://cn.bing.com/academic/profile?id=e8805c0eb2f37df449a11a7f66e5b0aa&encoded=0&v=paper_preview&mkt=zh-cn [15] MUSICKI D, SONG T L, LEE H H, et al. Correlated Doppler-assisted target tracking in clutter[J]. IET Radar Sonar & Navigation, 2013, 7(1):94-100. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=c1ca3079c55fed6bf9b75b63b988b842 [16] JIN B, JIU B, SU T, et al. Switched Kalman filter-interacting multiple model algorithm based on optimal autoregressive model for manoeuvring target tracking[J]. IET Radar Sonar & Navigation, 2014, 9(2):199-209. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=e1e669339a0e8d32a2585e2c4a7aa6bb [17] SONG T L, MUSICKI D. Adaptive clutter measurement density estimation for improved target tracking[J]. IEEE Transactions on Aerospace & Electronic Systems, 2011, 47(2):1457-1466. http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ0224502028/ [18] WANG X, CHALLA S, EVANS R. Gating techniques for maneuvering target tracking in clutter[J]. IEEE Transactions on Aerospace & Electronic Systems, 2002, 38(3):1087-1097. http://cn.bing.com/academic/profile?id=2237950910e8c95e4259eb15ee32d60c&encoded=0&v=paper_preview&mkt=zh-cn [19] YAN J, LIU H, JIU B, et al. Simultaneous multibeam resource allocation scheme for multiple target tracking[J]. IEEE Transactions on Signal Processing, 2015, 63(12):3110-3122. doi: 10.1109/TSP.2015.2417504 [20] YAN J, LIU H, PU W, et al. Joint beam selection and power allocation for multiple target tracking in netted colocated MIMO radar system[J]. IEEE Transactions on Signal Processing, 2016, 64(24):6417-6427. doi: 10.1109/TSP.2016.2607147 [21] ZHU Y, WANG J, LIANG S. Efficient joint probabilistic data association filter based on Kullback-Leibler divergence for multi-target tracking[J]. IET Radar Sonar & Navigation, 2017, 11(10):1540-1548. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=d14105994d6951e78d8625dde0623de8 -

 点击查看大图
点击查看大图
图(4) / 表(1)
计量
- 文章访问数: 4869
- HTML全文浏览量: 1221
- PDF下载量: 114
- 被引次数: 0
