 ISSN
ISSN 


 下载:
下载:


-
随着环境问题、石油供应安全以及间歇性可再生能源在电网中使用的增加,电动汽车(electric vehicle, EV)作为新一代的交通工具,在节能减排、减少人类对传统化石能源的依赖方面具备传统汽车不可比拟的优势[1]。与传统能源汽车相比,EV的充电方式是实际推广中的一个难点,现在已经有许多科研工作者对此展开了大量工作。其中,无线充电技术是一种安全且快捷的充电方式[2],能使EV在整个使用周期中的能耗和碳排放方面有更好的性能[3]。
EV的无线充电技术分为静态和动态两种方式,静态无线充电主要以充电站和电池交换站的形式存在。动态无线充电指EV在专用车道上边行驶边充电,在一定程度上节约了EV在城市里充电的时间和空间,是正在开发和测试的新兴应用[4]。目前,许多研究都围绕在无线充电的传输功率、距离、效率以及装置构造等技术问题上[5-8],文献[9-10]则从EV运行时的控制效果出发。本文的研究也侧重后者。
在充电控制的研究中,一些文献对EV充电负荷进行建模,但模型中EV数量过少,如文献[11-12]中分别只对1辆和6辆车进行研究,数据规模较小,忽略了大规模的集群效应。文献[13-14]则研究了EV的集中控制策略,或使负荷变化最小化,或使动力损失最小化,或提高EV渗透率等。这些集中控制策略需要采集所有EV的大量信息,优化全部EV的充电曲线,对通信和计算方面提出了更高的要求。此外,一些学者研究了大量EV接入动态无线充电时对电网的波动影响,如文献[15]提出一种自适应储能系统控制方法,在降低电网侧功率的斜率同时延长电池寿命。还有一些研究通过价格来引导EV的充电行为,从电力系统[16]、充电站[17]或EV用户[18]的角度分析了电价控制策略,文献[19]从能源供给端与EV用户双方总效益的角度研究了电能供需匹配。在电价控制策略中,评估价格是一个复杂的过程,并且涉及了各种相关者的利益,有时很难衡量。
上述这些控制方法大多考虑了EV有线充电的情况,EV动态无线充电还只停在技术层面上,针对EV动态无线充电的具体控制应用较少。本文以24 h为周期的某段无线充电道路上EV充电状况为场景,通过自适应动态规划方法,从电能流动角度研究电能供给到电能消耗的过程,提出了电能供给端的供电配比策略及电能消耗端的自适应充电功率控制。
-
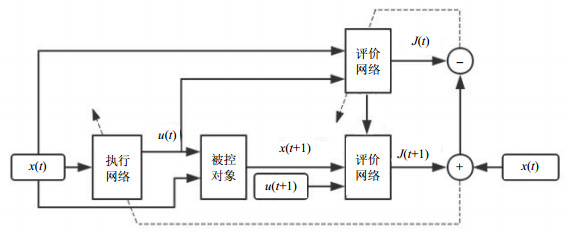
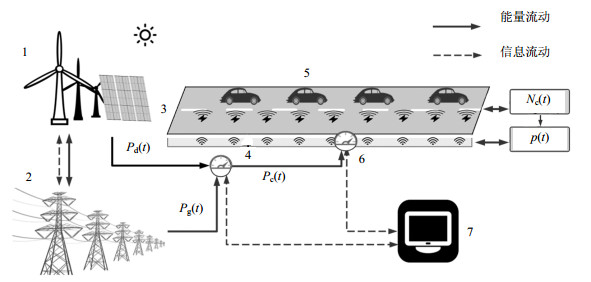
EV动态无线充电系统模型如图 1所示,考虑同一类型的电动私家车在无线充电车道上行驶,通过铺设在车道底下的充电设备进行充电。没有控制系统时,充电设备以恒定充电功率对EV充电。加入控制系统后,通过对无线充电车道上EV的接入充电数量的统计信息,由控制系统给出动态变化的充电功率。另外,控制系统还通过主电网和分布式能源的供电成本控制两者的比例,以满足EV充电需求。

图 1 EV动态无线充电模型
考虑离散时间控制,将时隙记为t,有$t = 1, 2, 3, \cdots $。t时刻车道上接入充电的车辆数记为${N_{\rm{c}}}(t)$,每辆车的充电功率记为$p(t)$,$p(t)'$为恒定充电功率,充电系统的总充电功率记为${P_{\rm{c}}}(t)$,电网侧供电功率记为${P_{\rm{g}}}(t)$,分布式能源供电功率记为${P_{\rm{d}}}(t)$,主电网与分布式能源供电占比分别记为${R_{\rm{g}}}(t)$、${R_{\rm{d}}}(t)$,路段车辆行驶平均速度记为$v(t)$,电网供电单位成本为${C_{\rm{g}}}$,分布式能源供电成本为${C_{\rm{d}}}$。有${\rm{ }}{R_{\rm{g}}}(t) + {R_{\rm{d}}}(t) = 1$,${P_{\rm{c}}}(t) = {N_{\rm{c}}}(t)*$,$p(t) = $ ${P_{\rm{g}}}(t) + {P_{\rm{d}}}(t) = $${P_{\rm{g}}}(t)/{\rm{ }}{R_{\rm{g}}}(t) = {\rm{ }}{P_{\rm{d}}}(t){\rm{/ }}{R_{\rm{d}}}(t)$。
考虑EV无线充电时优化以下4个目标:
1) 降低无线充电的总负荷压力。无线充电的总负荷由充电道路上接入充电车数量和充电功率决定,系统控制主电网和分布式能源对其提供电能。由于分布式能源发电量的不确定性,某一时刻分布式能源发电量可能为零,有${P_{\rm{d}}}(t) = 0$,${P_{\rm{c}}}(t) = {P_{\rm{g}}}(t)$,充电功率全部由主电网供给。而局部过高的充电负荷会对电网稳定性造成影响,故需要通过控制不同时间的充电功率来调节路段上的总充电负荷。随着充电负荷的增加,负荷压力成指数上升,总负荷压力表述为:
$$H(t) = \exp ({P_{\rm{c}}}(t))$$ (1) 2) 提高充电用户满意度。EV的发展离不开汽车充电难题的解决,而无线充电可以在充电时间和充电空间上更具优势。为了提高EV无线充电的用户体验,提出用户满意度来表征用户体验。用户满意度与该路段充入的总电能有正向关系,则假定EV用户的充电满意度$S(t)$随该路段充电功率$p(t)$增加而上升,行驶速度过快导致充电量较少,所以用户满意度$S(t)$与行驶速度$v(t)$成反比。另外,充电功率$p(t)$较低时,随着充电功率的增加,用户满意度$S(t)$有明显提升;而当充电功率$p(t)$较高时,随着充电功率的增加,用户的满意度$Q(t)$提升减缓。所以将用户满意度表述为:
$$S(t) = {N_{\rm{c}}}(t)\ln \left( {\frac{{p(t)}}{{p(t)'}} + 1} \right)\frac{1}{{v(t)}}$$ (2) 3) 降低供电成本。由于传统的化石燃料发电引起的环境成本升高,并且可再生的分布式能源在大力发展的背景下成本日益降低,同时再考虑分布式能源的就近输送和转化成本效益,提出了降低供电成本的目标,其表达式为:
$$ C(t) = {C_{\rm{g}}}{P_{\rm{g}}}(t) + {C_{\rm{d}}}P{}_{\rm{d}}(t) $$ (3) 4) 提高供电稳定性。虽然分布式能源有其绿色和经济的优点,但是分布式可再生能源有着电能质量和供电可靠性较差的缺点,所以需要考虑主电网与分布式能源的供电配比来提高整体供电的稳定性。供电稳定性的函数表达式如式(4)所示,由主电网单独供电时分布式能源供电占比${R_{\rm{d}}}(t) = 0\% $,则最高供电稳定性$Q(t) = 1$;当主电网供电占比较大即${R_{\rm{d}}}(t)$值较小时,供电稳定性$Q(t)$较高;随着分布式能源接入比例${R_{\rm{d}}}(t)$的增大,供电稳定性$Q(t)$急剧下降;而当接入的分布式能源${R_{\rm{d}}}(t)$占比过大接近100%时,其供电稳定性$Q(t)$很低,下降趋势不明显。
$$Q(t) = \ln [e - {R_{\rm{d}}}{(t)^2}]$$ (4) 前两个目标主要影响充电功率的控制,后两个目标主要影响供电配比的控制。
-
控制器通过对路段车流量的监控对车道的充电功率进行控制,并进一步调整供能端的供电配比策略。记$x(t)$为系统在时隙t时的状态,有$x(t) = ({N_{\rm{c}}}(t), {\rm{ }}{P_{\rm{c}}}(t - 1))$。记$u(t)$为系统在时隙t的决策,有$u(t) = ({P_{\rm{c}}}(t), {\rm{ }}{R_{\rm{g}}}(t))$。记$U[x(t), u(t)]$为系统在t时隙的单步代价,其定义为:
$$U[x(t), u(t)] = {\omega _{\rm{h}}}\mathop H\limits^ \bullet (t) - {\omega _{\rm{s}}}\mathop S\limits^ \bullet (t) + {\omega _{\rm{c}}}\mathop C\limits^ \bullet (t) - {\omega _{\rm{q}}}\mathop Q\limits^ \bullet (t)$$ (5) 式中,${\omega _{\rm{h}}}$、${\omega _{\rm{s}}}$、${\omega _{\rm{c}}}$、${\omega _{\rm{q}}}$是相对应的权重;$\mathop H\limits^ \bullet (t)$、$\mathop S\limits^ \bullet (t)$、$\mathop C\limits^ \bullet (t)$、$\mathop Q\limits^ \bullet (t)$为标准化后的值。记$J[x(t)]$为系统在$t$, $t + 1$, …的总代价,其定义为:
$$J[x(t)] = \sum\limits_{j = t}^\infty {{\gamma ^{j - t}}U[x(j), u(j)} ]$$ (6) 式中,$\gamma $为折扣因子,有$0 \leqslant \gamma \leqslant 1$。$\gamma = 0$时代表只考虑当前时隙代价,$\gamma = 1$时认为所有时隙的代价同等重要。
-
ADP是利用函数近似结构,来逼近动态规划中的性能指标函数模块和控制模块,以满足最优性原理。自适应动态规划主要由动态系统、执行(Action)函数和评价(Critic)函数3部分组成,通常可以用神经网络来近似这些模块。其中动态系统可以通过神经网络进行建模,执行网络和评价网络分别用来近似最优控制策略和最优性能指标函数。
自适应动态规划的基本结构有HDP、DHP、ADHDP和ADDHP等,其中ADHDP没有模型网络,其结构如图 2所示,主要包括执行网络和评价网络。执行网络的输入为系统状态参数$x(t)$,输出为当前状态下的控制量$u(t)$;评价网络的输入是当前状态下的系统状态参数$x(t)$和控制量$u(t)$,输出是长期代价估计值${J^{\wedge}}(t)$,其作用是对控制进行评价,评价作用体现为以输出来影响执行网络和评价网络的权值。

图 2 ADHDP算法结构图
-
采用BP神经网络仿真评价模块和执行模块,激活函数采用双极性S函数,$l$为学习率,采用梯度下降法进行神经网络训练。${ \mathit{\boldsymbol{W}}_{\rm{c}}}(t)$为评价网络的权值矩阵,${ \mathit{\boldsymbol{W}}_{\rm{a}}}(t)$为执行网络的权值矩阵。
训练评价网络以使长期估计代价${J^\wedge}(t)$逼近设计性能指标$J[x(t)]$,定义评价网络输出误差为:
$${E_{\rm{c}}} = \frac{1}{2}{[{J^\wedge}(t - 1) - U[x(t - 1), u(t - 1)] - \gamma {J^\wedge}(t)]^2}$$ (7) 当${E_{\rm{c}}} = 0$时,有:
$$\begin{gathered} {J^\wedge}(t) = U[x(t), u(t)] + \gamma {J^\wedge}(t + 1) = \\ U[x(t), u(t)] + \gamma (U[x(t + 1), u(t + 1)] + \\ \gamma {J^\wedge}(t + 2)) = \cdots = \sum\limits_{j = t}^\infty {{\gamma ^{j - t}}U[x(j), u(j)]} \\ \end{gathered} $$ (8) 评价网络输出是系统的长期代价,所以训练评价网络以最小化误差${E_{\rm{c}}}$为目标。对应的评价网络权值更新公式为:
$${\mathit{\boldsymbol{W}}_{\rm{c}}}(t + 1) = {\mathit{\boldsymbol{W}}_{\rm{c}}}(t) + {l_{\rm{c}}}(t)\left[ { - \frac{{\partial {E_{\rm{c}}}(t)}}{{\partial {\mathit{\boldsymbol{W}}_{\rm{c}}}(t)}}} \right]$$ (9) 训练执行网络以使长期估计代价${J^\wedge}(t)$最小,定义评价网络输出误差为:
$${E_{\rm{a}}} = \frac{1}{2}{[{J^\wedge}(t)]^2}$$ (10) 训练执行网络以最小化误差${E_{\rm{a}}}$为目标,使长期代价最小化。对应的评价网络权值更新公式为:
$${\mathit{\boldsymbol{W}}_{\rm{a}}}(t + 1) = {\mathit{\boldsymbol{W}}_{\rm{a}}}(t) + {l_{\rm{a}}}(t)\left[ { - \frac{{\partial {E_{\rm{a}}}(t)}}{{\partial {\mathit{\boldsymbol{W}}_{\rm{a}}}(t)}}} \right]$$ (11) -
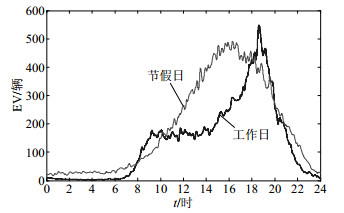
仿真模拟一个安装在8 km道路上的无线充电系统,车的长度5 m,车距10 m,平均车速72 km/h。设每个时隙为10 s,则仿真中一天24 h有8 640个时隙。主电网供电成本${C_{\rm{g}}}$和分布式能源供电成本${C_{\rm{d}}}$量化为6:4。图 3给出了工作日和节假日两种情况下考虑充电接入概率的充电车辆数图,两种情况的最主要区别在于负荷高峰段的不同,最后得出的实验结论大体一致,本文仿真以工作日的情况进行。

图 3 24 h路段EV接入充电数量图
工作日的无线充电车道上一天的车流量会出现早晚两个车流量高峰段,考虑充电接入概率的充电车辆数如图 3虚线所示,由于傍晚返程时EV储能系统的荷电状态较低,大多数用户需要在此时充电,形成傍晚的充电负荷高峰,需要进行动态充电功率调节。
自适应动态规划算法参数设置为:评价网络和控制网络采用结构为4-6-1和2-6-2的BP神经网络,学习率分别为${l_{\rm{c}}}$=0.12和${l_{\rm{a}}}$=0.12。折扣因子$\gamma $取0.95,${\omega _{\rm{h}}}$、${\omega _{\rm{s}}}$、${\omega _{\rm{c}}}$、${\omega _{\rm{q}}}$分别取0.05、0.45、0.1、0.4。
-
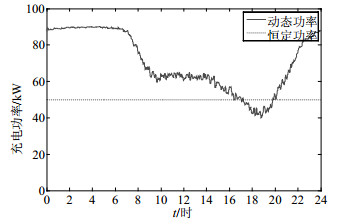
图 4给出了经过控制前后的动态充电功率变化曲线,可见在0~6时的充电低峰段,路段上车辆较少,每辆EV都能以约90 kW的功率进行充电;在16~22时的充电高峰段,接入充电车辆较多,系统控制负荷压力稍微降低了每辆车的充电功率。

图 4 充电功率变化图
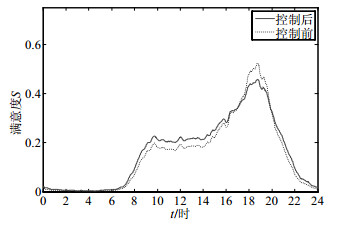
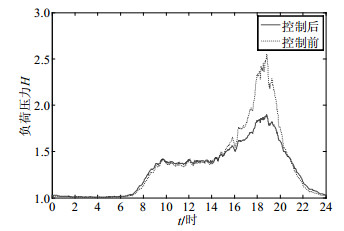
图 5和图 6分别是控制前后的满意度和负荷压力的变化对比。由图可知,当EV充电接入数量较小时,控制器会控制充电功率以高于恒定功率的倍率进行充电,满足用户充电体验;当EV充电接入数量较大时,控制充电功率以低于恒定功率的倍率充电,降低充电负荷高峰段的负荷压力。控制结果显示,在一天的大部分时间内提高了用户满意度,同时又降低了负荷高峰时段的最大充电负荷压力,兼顾了需求侧和供应侧的要求。

图 5 EV用户总体满意度变化曲线图

图 6 路段负荷压力变化曲线图
-
图 7给出了在控制方法下,总充电负荷曲线以及电网供能和分布式能源供电变化曲线图。由图可知,在负荷总量较小时,主电网供能占比降低而分布式能源的供能占比提高,此时更注重成本因素;在负荷总量较高时,电网供能占比升高而分布式能源的供能占比减小,此时更加考虑供电的稳定性。

图 7 负荷功率与供电源功率变化曲线图
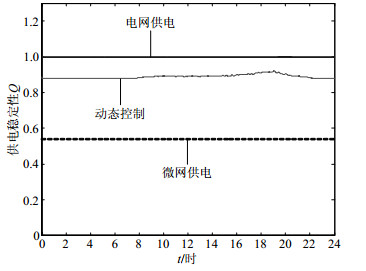
图 8和图 9为具体相对单位成本和供电稳定性的变化曲线图。从图可见,如果全部接入电网供电,虽然稳定性得到最高的效果,但是相对成本较高;如果全部由分布式微电网的能源供电,虽然在成本上有所降低,但是供电稳定性过低不能满足EV充电时间和空间分布随机的巨大需求和挑战。而通过控制后的成本在电网供电和分布式能源供电的成本之间,而供电稳定性维持在了一个较高且稳定状态上,这有利于供电发生故障或波动进行预防调控。仿真结果表明,在充分利用分布式能源的基础上,同时满足EV动态无线充电道路对供电稳定性的要求。

图 8 各情形的相对成本曲线图

图 9 供电稳定性变化曲线图
-
本文针对EV动态无线充电调节,提出了一种自适应动态功率控制及供电配比控制方法。综合考虑充电负荷压力、用户满意度、供电成本和供电稳定性,采用自适应动态规划算法,通过神经网络迭代训练,估计并最优化长期代价,从而得到近似最优的动态功率控制策略和供电配比控制策略。通过仿真表明,该方法能有效降低高峰充电负荷压力,提高用户充电的长期满意度,在优化供电成本的同时维持了较高的供电稳定性。本文中,考虑了同一类型的私家车的无线充电控制,未涉及对多种充电功率标准的不同类型电动汽车的充电控制,这一点将会是接下来的工作方向。
Adaptive Control Method for Dynamic Wireless Charging of Electric Vehicles
-
摘要: 针对电动汽车的动态无线充电方式,提出了一种自适应控制算法,对电动汽车的充电功率及其供电来源的供电配比进行优化调节。在代价函数中综合考虑了电动汽车用户的充电满意度、无线充电道路的负荷压力、供电成本以及供电稳定性,通过自适应动态规划(ADP)算法,训练神经网络估计并最小化长期代价函数,得到近似最优的控制策略。仿真结果表明,该方法能够兼顾用户充电满意度和充电道路的负荷压力,同时满足供电成本和供电稳定性的要求。Abstract: Considering the dynamic wireless charging mode of electric vehicles, an adaptive control algorithm is proposed to optimize the charging power of electric vehicles and the power supply ratio of the power supply sources. In the cost function, the charging satisfaction of the electric vehicle users, the load burden of a wireless charging road, the power supply cost and the power supply stability are comprehensively considered. Through an adaptive dynamic programming (ADP) algorithm, neural networks are trained to estimate and minimize the long-term cost function, and an approximate optimal control strategy is obtained. Simulation results show that the proposed method can take into account the user's charging satisfaction and load burden of the charging road, while meeting the requirements of power supply cost and stability.
-
Key words:
- ADP /
- charging power /
- dynamic wireless charging /
- electric vehicles /
- power supply ratio
-
[1] 胡泽春, 宋永华, 徐智威, 等.电动汽车接入电网的影响与利用[J].中国电机工程学报, 2012, 32(4):1-10. http://d.old.wanfangdata.com.cn/Periodical/zgdjgcxb201204002 HU Ze-chun, SONG Yong-hua, XU Zhi-wei, et al. Impacts and utilization of electric vehicles integration into power systems[J]. Proceedings of the Csee, 2012, 32(4):1-10. http://d.old.wanfangdata.com.cn/Periodical/zgdjgcxb201204002 [2] JEONG S, JANG Y J, KUM D. Economic analysis of the dynamic charging electric vehicle[J]. IEEE Transactions on Power Electronics, 2015, 30(11):6368-6377. doi: 10.1109/TPEL.2015.2424712 [3] BI Z, SONG L, KLEINE R D, et al. Plug-in vs. wireless charging:Life cycle energy and greenhouse gas emissions for an electric bus system[J]. Applied Energy, 2015, 146(5):11-19. http://cn.bing.com/academic/profile?id=3fa522177ff81dd186449bef94b1b2ae&encoded=0&v=paper_preview&mkt=zh-cn [4] CHEN Z, LIU W, YIN Y. Deployment of stationary and dynamic charging infrastructure for electric vehicles along traffic corridors[J]. Transportation Research Part C Emerging Technologies, 2017, 77(1):185-206. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=94259f400aaf3ea7e723ad7ec7d13d02 [5] KURS A, KARALIS A, MOFFATT R, et al. Wireless power transfer via strongly coupled magnetic resonances[J]. Science, 2007, 317(5834):83-86. doi: 10.1126/science.1143254 [6] NAGATSUKA Y, EHARA N, KANEKO Y, et al. Compact contactless power transfer system for electric vehicles[C]//Power Electronics Conference.[s.l.]: IEEE, 2010: 807-813. https://ieeexplore.ieee.org/document/5543313 [7] EGHTESADI M. Inductive power transfer to an electric vehicle-analytical model[C]//Vehicular Technology Conference.[S.l.]: IEEE, 2002: 100-104. https://ieeexplore.ieee.org/document/110303 [8] SALLAN J, VILLA J L, LLOMBART A, et al. Optimal design of ICPT systems applied to electric vehicle battery charge[J]. IEEE Transactions on Industrial Electronics, 2009, 56(6):2140-2149. doi: 10.1109/TIE.2009.2015359 [9] 佟晶晶, 温俊强, 王丹, 等.基于分时电价的电动汽车多目标优化充电策略[J].电力系统保护与控制, 2016, 44(1):17-23. http://d.old.wanfangdata.com.cn/Periodical/jdq201601003 TONG Jing-jing, WEN Jun-qiang, WANG Dan, et al. Multi-objective optimization charging strategy for plug-in electric vehicles based on time-of-use price[J]. Power System Protection & Control, 2016, 44(1):17-23. http://d.old.wanfangdata.com.cn/Periodical/jdq201601003 [10] LU X, LIU N, CHEN Q, et al. Multi-objective optimal scheduling of a DC micro-grid consisted of PV system and EV charging station[C]//Innovative Smart Grid Technologies-Asia.[S.l.]: IEEE, 2014: 487-491. https://ieeexplore.ieee.org/document/6873840 [11] MIDLAM-MOHLER S, EWING S, MARANO V, et al. PHEV fleet data collection and analysis[C]//IEEE Vehicle Power and Propulsion Conference.[S.l.]: IEEE, 2009: 1205-1210. https://wenku.baidu.com/view/c4ad0ec2fe4733687f21aa45.html [12] HILSHEY A D, HINES P D H, REZAEI P, et al. Estimating the impact of electric vehicle smart charging on distribution transformer aging[J]. IEEE Transactions on Smart Grid, 2013, 4(2):905-913. doi: 10.1109/TSG.2012.2217385 [13] CLEMENT K, HAESEN E, DRIESEN J. Coordinated charging of multiple plug-in hybrid electric vehicles in residential distribution grids[C]//IEEE/PES Power Systems Conference and Exposition, PSCE'09.[S.l.]: IEEE, 2009: 1-7. https://ieeexplore.ieee.org/document/4839973 [14] LOPES J A P, SOARES F J, ALMEIDA P M R, et al. Smart charging strategies for electric vehicles: Enhancing grid performance and maximizing the use of variable renewable energy resources[C]//EVS24 International Battery, Hybrid and Fuel Cell Electric Vehicle Symposium EVS24 International Battery, Hybrid and Fuel Cell Electric Vehicle Symposium.[S.l.]: [s.n.], 2009: 13-16. [15] 周文辉, 钟伟锋, 吴杰, 等.面向智能电网负荷调节的自适应储能系统控制[J].北京邮电大学学报, 2017, 40(1):32-35. http://d.old.wanfangdata.com.cn/Periodical/bjyddx201701005 ZHOU Wen-hui, ZHONG Wei-feng, WU Jie, et al. Adaptive energy storage system control for load regulation in smart grid[J]. Journal of Beijing University of Posts & Telecommunications, 2017, 40(1):32-35. http://d.old.wanfangdata.com.cn/Periodical/bjyddx201701005 [16] SUN X H, YAMAMOTO T, MORIKAWA T. Charge timing choice behavior of battery electric vehicle users[J]. Transportation Research Part D, 2015, 37(1):97-107. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=a2ef11e736b5e711a2ee7308110ede35 [17] SHEN Y, HAN H, YUAN Z, et al. Coordinated charging of plug-in electric vehicles in the charging station[C]//Transportation Electrification Asia-Pacific.[S.l.]: IEEE, 2014: 1-4. [18] 周文辉, 钟伟锋, 余荣.智能电网中电动汽车充电的自适应电价控制方法[J].电子科技大学学报, 2015, 44(4):636-640. doi: 10.3969/j.issn.1001-0548.2015.04.028 ZHOU Wen-hui, ZHONG Wei-feng, YU Rong. Price control for electric vehicle charging in smart grid:Adaptive dynamic programming approach[J]. Journal of University of Electronic Science & Technology of China, 2015, 44(4):636-640. doi: 10.3969/j.issn.1001-0548.2015.04.028 [19] 周文辉, 钟伟锋, 吴杰, 等.面向电动汽车无线充电市场的迭代双边拍卖算法[J].电子科技大学学报, 2017, 46(6):861-865, 889. doi: 10.3969/j.issn.1001-0548.2017.06.012 ZHOU Wen-hui, ZHONG Wei-feng, WU Jie, et al. Iterative double auction algorithm for wireless electric vehicle charging market[J]. Journal of the University of Electronic Science & Technology of China, 2017, 46(6):861-865, 889. doi: 10.3969/j.issn.1001-0548.2017.06.012 -

 点击查看大图
点击查看大图
图(9)
计量
- 文章访问数: 4977
- HTML全文浏览量: 1382
- PDF下载量: 63
- 被引次数: 0
