 ISSN
ISSN 


 下载:
下载:

-
近年来,随着WLAN和无线传感器网络的发展,室内位置服务已成为了当下最重要的服务需求之一。在室外定位方面,主要采用卫星导航进行定位。但在一般的室内环境下,卫星导航信号会受到建筑物的遮挡,使得定位精度相比室外出现严重的偏差,无法用于室内定位[1]。
目前的室内定位技术主要基于无线局域网、蓝牙[2]、红外[3]、可见光[4]、传感器[5]、射频识别[6]等技术。由于成本造价、系统复杂度和稳定性等因素,限制了蓝牙、超宽带、红外、可见光的大规模应用;射频识别受限于功率只能用于近距离定位;基于传感器的室内定位技术需要移动终端装有运动传感器,例如加速度计、陀螺仪,但不是所有移动终端都能满足。由于WLAN的分布范围广、造价低,因此基于WLAN的定位方法被广泛使用。基于WLAN的定位系统包括以下3种方式:基于阵列天线估计到达角的定位技术、基于接收信号强度(received signal strength, RSS)的室内指纹定位技术和基于信号到达飞行时间的定位技术。基于RSS的室内指纹定位技术[7]一般包括离线和在线两个阶段,在离线阶段需要消耗很长时间采集信号强度指纹库,而且由于环境不是一直保持不变,需要及时对指纹库进行更新;基于飞行时间的室内定位技术[8]需要终端与AP之间的时钟高度同步[9]或需要特殊的硬件设备[10-11]且精度依赖于LOS(line-of-sight)环境;基于到达角的定位系统则采用多信号分类算法[12](multiple signal classification, MUSIC)来估计无线信号的AOA,但是该算法要求天线数量大于路径数,通常室内存在6~8个主要多径信号[13],因此AP需要很多根天线,这对目前的商业AP是不行的。SpotFi[14]通过重构CFR信息来扩展天线的数量,在一定程度上解决了天线数量限制的问题,但当存在多个相干信源时会造成角度的估计精度下降。同时这些基于无线信号的室内定位方法大都需要多个AP才能满足室内定位的需求[15-18],在复杂的室内环境下特别只有一个AP时会出现无法定位的情况。
本文针对上述定位方法存在的问题以及单AP下无法定位的情况,提出了一种新的室内定位方法。该方法首先利用空间平滑技术对相干信源进行解相干,实现室内多径信号的高精度AOA估计,其次将采集到的CFR在时域进行滤波处理减小多径效应的干扰,提高距离估计的精度,同时通过信号传播模型结合一种自适应衰减因子更新技术实现室内环境下目标到AP的距离估计。另外将聚类算法、离群点检测算法与权值分析法结合,设计了一种直射径分辨算法对多径信号进行分类并识别直射路径。最后利用角度/距离联合定位算法结合目标到单个AP的距离及直射路径的角度信息估计出目标的位置。
-
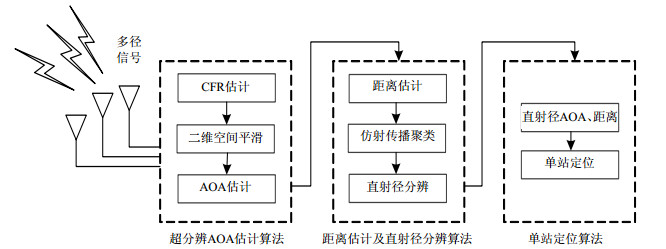
本文提出的基于CFR的角度/距离联合单站定位的系统框图如图 1所示。主要包括3个部分:超分辨AOA估计算法、距离估计及直射径分辨算法、单站定位算法。超分辨AOA估计算法主要利用CFR信息虚拟出大规模的阵列天线并结合一种空间平滑技术,解决了天线数量限制及相干信源干扰的问题,实现了仅利用三天线商业AP对室内多径信号AOA的精确估计。距离估计算法通过信号传播模型结合一种自适应衰减因子更新技术,利用CFR的幅值信息进行距离估计。直射路径分辨算法在获得AOA和TOA二维信息的基础上,利用AOA和TOA信息进行聚类来区分路径,并采用离群点检测算法来提高聚类的准确性,最后利用权值选取直射路径。

图 1 系统框图
-
MUSIC算法[12]主要利用多个路径信号到达天线阵列时相邻两根天线间的波程差进行角估计。根据文献[19]可知,MUSIC算法需要的阵列天线数大于多径信号的个数,否则无法从协方差矩阵中区分出信号子空间与噪声子空间,造成角度估计出现错误。当室内环境中存在相干信号时,信号子空间的特征向量会扩散到噪声子空间,造成MUSIC算法估计角度时会出现大的误差。
OFDM信号基于Wi-Fi信号,利用CFR信息对天线数量进行扩展。在OFDM通信系统中对不同的子载波信道频率响应为:
$${\rm{CFR}}\left[ {{f_n}} \right] = \sum\limits_{k = 1}^D {{\alpha _k}{{\rm{e}}^{ - {\rm{j}}2\pi \left( {{f_0} + n\Delta f} \right){\tau _k}}}} $$ (1) 式中,D表示信号路径;${\alpha_k}$表示第$k$条路径的信号衰减;${\tau _k}$表示第$k$条路径的信号传播时间;${f_n}$为载波频率,${f_n} = {f_0} + n\Delta f$;$\Delta f$为相邻两个子载波之间的频率差。本文通过Intel 5300[20]无线商业网卡可以采集128个子载波中30个子载波的CFR测量值。
在接收端,假设信号路径有K条,3根天线上采集到的子载波CFR可以表示为:
$$\mathit{\boldsymbol{H}} {\rm{ = }}{\left[ {{h_{1, 1}}{\rm{ }} \cdots {\rm{ }}{h_{1, 30}}{\rm{ }}{h_{2, 1}}{\rm{ }} \cdots {\rm{ }}{h_{2, 30}}{\rm{ }}{h_{3, 1}}{\rm{ }} \cdots {\rm{ }}{h_{3, 30}}} \right]^{\rm{{\rm T}}}}$$ (2) 式中,${h_{m, n}}(m = 1, 2, 3, {\rm{ }}n = 1, 2, \cdots , 30)$表示第m根天线、第n个子载波上的CFR。由式(1)和式(2)可知:
$$\mathit{\boldsymbol{H}}{\rm{ = }}\mathit{\boldsymbol{AX}}{\rm{ + }}\mathit{\boldsymbol{N}}$$ (3) 式中,$\mathit{\boldsymbol{N}} = {[{n_{1, 1}}{\rm{ }} \cdots {\rm{ }}{n_{1, 30}}{\rm{ }}{n_{2, 1}}{\rm{ }} \cdots {\rm{ }}{n_{2, 30}}{\rm{ }}{n_{3, 1}}{\rm{ }} \cdots {\rm{ }}{n_{3, 30}}]^{\rm{{\rm T}}}}$,为$90 \times 1$维的噪声矩阵;$\mathit{\boldsymbol{X}} = {[{\alpha _{\rm{1}}} \alpha_{\rm{2}} \cdots {\alpha _K}]^T}$,为$K \times 1$维的路径衰减系数矩阵;$\mathit{\boldsymbol{A}}= [\mathit{\boldsymbol{\alpha }} ({\theta _1}, {\tau _1}){\rm{ }}\mathit{\boldsymbol{\alpha }} ({\theta _2}, {\tau _2}) \cdots $ $\mathit{\boldsymbol{\alpha }} ({\theta _K}, {\tau _K})]$为$90 \times K$维的方向矩阵。$\mathit{\boldsymbol{\alpha }} ({\theta _k}, {\tau _k})$为$90 \times 1$维方向矩阵,可以写为:
$$\mathit{\boldsymbol{\alpha }} ({\theta _k}, {\tau _k}) = {[{\mathit{\boldsymbol{\alpha }} _1}({\theta _k}, {\tau _k}){\rm{ }}{\mathit{\boldsymbol{\alpha }} _2}({\theta _k}, {\tau _k}){\rm{ }}{\mathit{\boldsymbol{\alpha }} _3}({\theta _k}, {\tau _k})]^{\rm{{\rm T}}}}$$ (4) 式中,${\mathit{\boldsymbol{\alpha }} _m}({\theta _k}, {\tau _k}) = [{\alpha _{m, 1}}({\theta _k}, {\tau _k}){\rm{ }}{\alpha _{m, 2}}({\theta _k}, {\tau _k}){\rm{ }} \cdots {\rm{ }}$ ${\alpha _{m, 30}}({\theta _k}, {\tau _k})]$$(m = 1, 2, 3)$为第m根天线上接收到的第k条路径的$30 \times 1$维的方向矩阵,其中:
$${\alpha _{m, i}}({\theta _k}, {\tau _k}) = {{\rm{e}}^{ - {\rm{j}}2\pi [(i - 1)\Delta f{\tau _k} + {{d(m - 1)\sin {\theta _k}f} \mathord{\left/ {\vphantom {{d(m - 1)\sin {\theta _k}f} c}} \right. } c}]}}{\rm{ }}~~i = 1, 2, \cdots , 30$$ (5) 式中,$\Delta f$表示子载波间隔;${\tau _k}$和${\theta _k}$表示第k条路径的时间与角度;d表示天线间隔;C表示光速。
子载波CFR的协方差矩阵表示为:
$$\mathit{\boldsymbol{R}} = {\rm{E}}\{ \mathit{\boldsymbol{H}} \times {\mathit{\boldsymbol{H}}^{\rm{H}}}\} $$ (6) 式中,${\mathit{\boldsymbol{H}}^{\rm{H}}}$是H的共轭转置。由文献[15]可知,方向矩阵A与噪声矩阵的特征向量正交,由此可以得到AOA与TOA的空间谱:
$${\mathit{\boldsymbol{P}}_{{\rm{music}}}} = \frac{1}{{{\alpha ^{\rm{H}}}(\theta ,\tau ){\mathit{\boldsymbol{E}}_\mathit{\boldsymbol{N}}}\mathit{\boldsymbol{E}}_\mathit{\boldsymbol{N}}^{\rm{H}}\alpha (\theta ,\tau )}}$$ (7) 式中,${{\mathit{\boldsymbol{E}}_\mathit{\boldsymbol{N}}}}$表示噪声子空间的特征向量。由于相干信号造成MUSIC算法误差较大,本文参考文献[14]提出二维空间平滑(2D-SS)算法。
本文通过将第一个子阵列的相关矩阵移动到第一个元素为${h_{n, m}} \times {h_{n, m}}$的位置作为下一个子阵列相关矩阵,重复上述操作,直到天线和子载波的索引为${L_1}{\rm{ = }}3 - {N_{{\rm{sub}}1}}{\rm{ + }}1$,${L_2}{\rm{ = }}30 - {N_{{\rm{sub}}2}}{\rm{ + }}1$时截止,从而得到所有子阵列的相关矩阵。本文根据需求将${N_{{\rm{sub}}1}}$和${N_{{\rm{sub2}}}}$分别设置为2和15,平滑后每个子阵列天线数量可以增加为${L_1} \times {L_2}{\rm{ = }}32$。对协方差矩阵R进行二维空间平滑:
$${\mathit{\boldsymbol{R}}_{{\bf{2D - SS}}}} = \frac{1}{{{L_1} \times {L_2}}}\sum\limits_{m = 1}^{{L_1}} {\sum\limits_{n = 1}^{{L_2}} {{\mathit{\boldsymbol{R}}_{m,n}}} } $$ (8) 式中,${{\mathit{\boldsymbol{R}}_{m,n}}}$表示第$((n - 1){L_2} + m)$个子阵列的相关矩阵;${h_{n, m}} \times {h_{n, m}}$表示${{\mathit{\boldsymbol{R}}_{m,n}}}$的第一个元素。经过平滑以后,信号子空间和噪声子空间会保持正交,可以准确估计出每条路径的AOA和TOA。
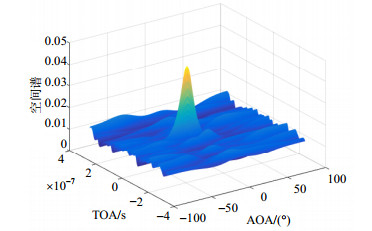
为了验证二维空间平滑算法在AOA估计中的有效性,本文利用MATLAB软件进行了仿真实验,试验中设置阵列天线为3个,相邻天线间距为半波长,使用30个载波频率间距为1.25 MHz的子载波,信号的中心频率为5.2 GHz。
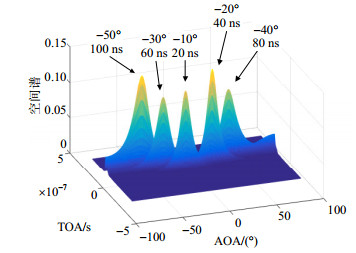
本文设置AOA和TOA分别为-10°、20 ns,20°、40 ns,-30°、60 ns,40°、80 ns,-50°、100 ns的5个相干信源。图 2为没有采用空间平滑后的仿真结果,图 3为采用空间平滑后的仿真结果。

图 2 未使用空间平滑解相干

图 3 空间平滑解相干
从图 2和图 3可以看出,采用二维空间平滑算法可以有效地解决相干信号AOA与TOA估计的问题。
在Wi-Fi网络中,接收到的数据包在基带处理中会引入一个随机时间,即包检测时延(packet detect delay, PDD),造成在TOF估计时有一个额外的时间,使估计出的时间为TOA而不是真实的TOF,${\rm{TOA = TOF}}{\rm{ + }}{\tau _{{\rm{delay}}}}$,其中${\tau _{{\rm{delay}}}}$为包检测时延。在接收端收到不同数据包的PDD是随机的,由文献[21]可知,第$k$个子载波由PDD产生的额外的相位偏移为$ - 2\pi \Delta f(k - 1){\tau _{{\rm{delay}}}}$。在Wi-Fi网络中${\tau _{{\rm{delay}}}}$一般为3~6个采样点所对应的时延,对本文使用的40 MHz带宽信号来说${\tau _{{\rm{delay}}}}$为75~150 ns,相比室内环境下信号平均传播时延10 ns量级要大的多。因此本文提出的超分辨AOA估计算法只能对角度进行准确的估计,无法利用时间信息进行距离估计。
-
室内环境下存在大量的多径信号,包括直射径信号以及反射径信号,反射径信号由于经过墙壁、地面或者其他物体的反射使原始信号在该路径上进行了衰减,造成距离估计精度下降。信道脉冲响应(channel impulse response, CIR)可以表征接收信号中各个路径的信号强度和延时,由于直射径信号相比反射径信号来说CIR幅值更高,本文将采集到的数据进行快速傅里叶逆变换(inverse fast fourier transform, IFFT)处理得到CIR信息并将CIR信息通过低通滤波器,选择CIR最大幅值的一半作为阈值进行低通滤波,过滤掉大量的反射径信号,并将滤波后的CIR进行快速傅里叶变换(fast fourier transform, FFT)得到滤波后的CFR信息。
目前,常用的路径衰减模型为自由空间模型、双线反射模型和对数-正态模型。其中,对数-正态模型最符合室内环境中无线信号的路径衰减状况,其表示形式为:
$${\rm{PL}}(d) = \overline {{\rm{PL}}({d_0})} + 10n\lg \left( {\frac{d}{{{d_0}}}} \right){\rm{ + }}{X_\sigma }$$ (9) 式中,${\rm{PL}}(d)$表示无线信号在自由空间传输距离$d$后出现的损耗;$\overline {{\rm{PL}}({d_0})} $表示在参考点${d_0}$处信号损耗的平均值;n为信号在传输时的损耗指数;${X_\sigma }$表示信号被遮挡产生的衰减。通过分析可知${\rm{PL}}(d) - \overline {{\rm{PL}}({d_0})} $表示参考点${d_0}$与d之间的信号损耗值,若能测得此两点处的信号强度${p_0}$和${p_{\rm{R}}}$,则信号损耗值可以通过${p_0} - {p_{\rm{R}}}$来表示。因此在室内环境下式(9)可简化为:
$${P_{\rm{R}}} = {P_0} - 10\gamma \lg (d)$$ (10) 式中,${P_{\rm{R}}}$是接收到的信号能量值;${P_0}$是距离发送方1 m处的能量值;d是待求的发送方和接收方之间的距离;$\gamma $是路径损耗系数,值越大表明信号损耗程度越高:
$${P_{\rm{R}}} = \frac{1}{k}\sum\limits_{i = 1}^k {{\rm{CF}}{{\rm{R}}_{{\rm{filter}}}}(i) \times {\rm{conj}}({\rm{CF}}{{\rm{R}}_{{\rm{filter}}}}(i))} $$ (11) 式中,${\rm{CF}}{{\rm{R}}_{{\rm{filter}}}}(i)$为每个数据包中第i个子载波滤波后的CFR信息;k为每个数据包子载波的个数,设$k = 30$。
但是对于不同的室内环境,路径损耗系数n是不同的,如果使用理想情况下的路径损耗系数则会造成距离估计精度误差较大。为了进行自适应,本文在文献[22]的基础上提出了一种自适应传播模型,定义环境因子$\xi $反映信号的衰减和遮挡情况:
$$\xi {\rm{ = }}\frac{{\sum\limits_{i = 1}^k {{\rm{CF}}{{\rm{R}}_{{\rm{filter}}}}(i) \times {\rm{conj}}({\rm{CF}}{{\rm{R}}_{{\rm{filter}}}}(i))} {\rm{ }}}}{{\sum\limits_{i = 1}^k {{\rm{CFR}}(i) \times {\rm{conj}}({\rm{CFR}}(i))} {\rm{ }}}}{\rm{ }}~~k = 30$$ (12) 在室内环境下选择多组d值已知的位置点,每个位置点采集多个数据包,分别对每个位置点数据包的$\xi $值和$\gamma $值进行解算,将得到的大量($\xi $, $\gamma $)数据利用最小二乘拟合得到$\xi $和$\gamma $之间的关系。即可通过环境因子$\xi $间接的得到路径损耗系数,提高距离估计的精度,因此本文将式(10)表示为:
$${P_{\rm{R}}} = {P_0} - 10\chi \lg \left( {\frac{d}{{{d_0}}}} \right)$$ (13) 式中,$\chi $表征的是路径损耗系数$\gamma $与环境因子$\xi $拟合的一种线性关系。
-
在室内环境下,直射路径相比于反射径来说比较稳定,因此聚类的结果在AOA与TOA维度上的方差比较小并且极值点的数目相比反射径来说也要多,因此可以使用权重分配的识别方法[14]。本文使用仿射传播聚类算法[23-24]对每条路径进行聚类,同时使用离群点检测[25]算法消除每个类的离群点,并将聚类后的每个路径分配权值:
$${\omega _k} = h({\alpha _c}{C_k} - {\alpha _\theta }{\sigma _{{\theta _k}}} - {\alpha _\tau }{\sigma _{{\tau _k}}} - {\alpha _s}{\tau _k})$$ (14) 式中,$h$为递增函数;${\sigma _{{\theta _k}}}$、${C_k}$、${\tau _k}$、${\sigma _{{\tau _k}}}$为第k条路径的角度方差、极值点个数、时间均值以及时间方差;${\alpha _c}$、${\alpha _\theta }$、${\alpha _\tau }$、${\alpha _s}$为极值点个数、角度方差、时间方差以及时间均值分配的权重信息。本文根据这4个因素对直射径判断的影响程度来分配这其权值,权值最大的路径作为直射径。
-
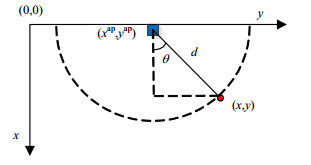
联合超分辨算法估计出的角度与传播模型估计出的距离信息,假设估计出的超分辨角度和距离分别$\theta $和d,建立定位模型,如图 4所示。当AP的坐标为$({x^{{\rm{ap}}}}, {y^{{\rm{ap}}}})$时,客户端的定位坐标$(x, y)$为$x = {x^{{\rm{ap}}}} + {x^{{\rm{ap}}}}d\cos \theta $,$y = {y^{{\rm{ap}}}} + {y^{{\rm{ap}}}}d\sin \theta $。

图 4 单站定位模型
-
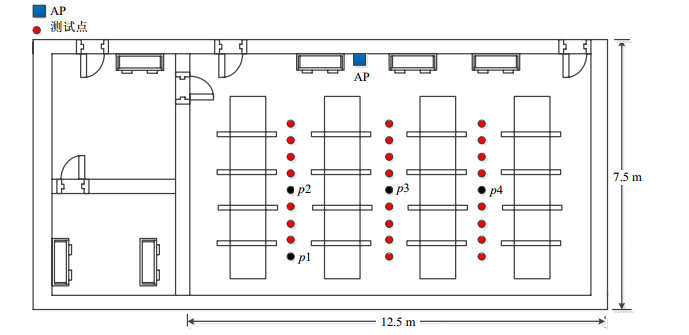
实验地点为室内环境重庆邮电大学逸夫楼520,图 5位测试环境的示意图,大小为$7.5{\rm{ m}} \times 12.5$m。在该环境下布置一台装备Intel 5300无线网卡的接收机作为AP。将每个AP外接3根天线,如图 6所示,其中天线间的间距设置为半波长。本文采用开源工具Linux CSI toolkit[20]采集AP的CFR,并将数据传到服务器上对位置进行解算。解算位置的服务器在Windows 7操作系统上运行,硬件配置为:处理器Inter(R) Core(TM) i3-2120,内存8 GB。本文采用三星S5手机作为信号的发射源,并进行移动,同时本文采用激光测距器提前计算测试点距离AP的位置以及角度。

图 5 测试环境平面图

图 6 三天线AP
-
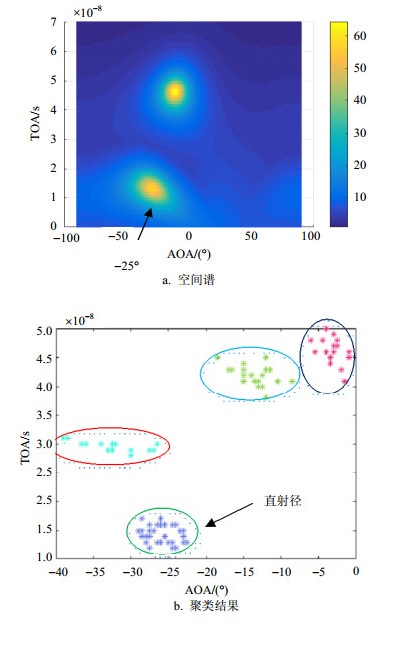
如图 5所示,带标识的圆点表示测试点,本文在测试点p1采集数据,并将数据传送到解算服务器,服务器会利用多个数据包解算出目标和AP之间的AOA和TOA,其中空间谱和聚类结果如图 7所示。

图 7 直射径判断
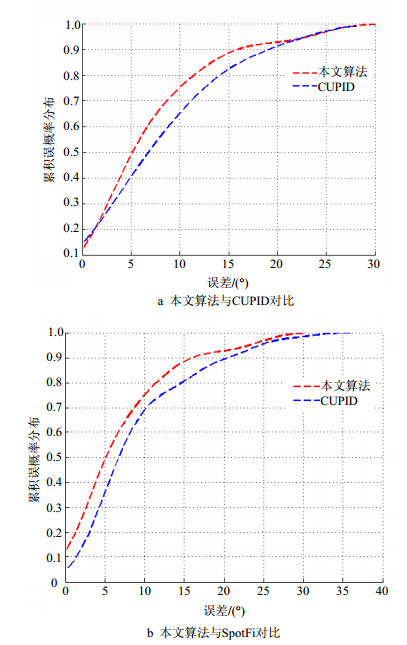
从图 7可以看出,室内环境下的直射径空间谱值并不一定是最高的,如果选择最高的谱值作为直射径,会造成一定的误差。CUPID[26]算法是选择谱峰最高的点作为直射路径,将CUPID算法与本文提出的算法进行了对比,如图 8a所示。从图中可以看到本文的算法在置信度为75%时,角度误差为10°,远远高于CUPID。图 8b为本文算法与SpotFi算法进行的对比,发现本文提出的角度估计算法效果好于SpotFi。

图 8 AOA估计误差CDF图
-
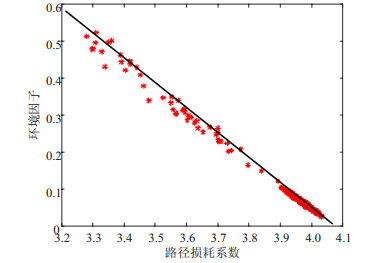
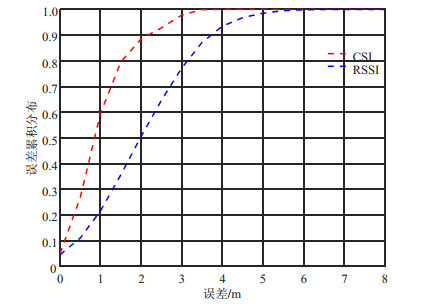
在室内环境下,由于RSSI稳定性较差[27],利用RSSI信息进行测距将造成很大的误差。本文分别利用采集到的RSSI信息及CFR信息带入信号传播模型进行测距。如图 5所示,在室内环境下选择27个测试点进行测试。首先在p2、p3、p4点采集200个数据包的CFR数据进行计算得到600组($\xi $, $\gamma $),对其进行拟合得到$\xi $和$\gamma $的关系如图 9所示。将其带入自适应传播模型得到的结果如图 10所示。从图中可以看出利用RSSI信息测距误差为1 m以内的置信度为20%,利用CFR测距误差为1 m以内的置信度为60%,精度远远高于使用RSSI。

图 9 $\xi $与$\gamma $之间的拟合关系

图 10 距离估计误差CDF图
-
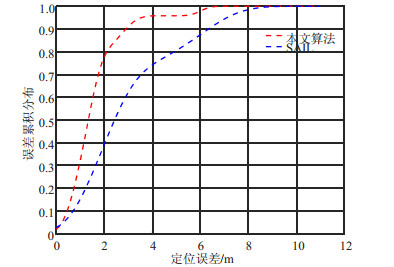
单站定位系统SAIL[28]通过利用从物理层提取的时间戳信息进行TOF估计,同时将TOF与MEMS结合,并利用航位推算技术完成单AP定位。本文通过与SAIL系统对比来验证本文提出算法的性能。
图 11给出了27个测试点在LOS环境下SAIL系统和本文提出的角度/距离联合单站定位算法的定位误差,可以看出SAIL定位系统的中值位置误差为2.5 m,角度/距离联合单站定位算法的中值位置误差为1.3 m,定位精度远远高于SAIL定位系统,同时不需要联合传感器的信息,只需要使用Wi-Fi信息便能满足单AP下室内高精度位置服务的需求。

图 11 SAIL算法与本文定位算法的累计误差分布对比
-
本文提出一种仅利用一台三天线商用AP即可满足室内高精度位置服务的室内定位系统,该系统首先提出一种适用于正交频分复用信号的超分辨角度估计算法,利用现有的比较常见的硬件,可以精确估计出多条路径的角度,同时提出一种基于聚类的直射路径判断算法来提高角度估计的精度,另外利用信道频率响应结合信号传播模型进行距离估计,最后结合角度和距离信息实现单站定位。由于该系统基于802.11n开发,利用了多天线以及OFDM信号的特性,使得该系统很容易推广。
Joint Angle/Distance Localization with Single Station Based on CFR
-
摘要: 单站定位在室内定位中起着至关重要的作用。大多数室内定位算法都是联合多个Wi-Fi接入点(AP)进行定位,在只有w单个AP时定位精度很低甚至无法定位。针对室内环境中普遍存在的单AP定位情况,该文首先利用现有的三天线商用Wi-Fi网卡采集无线信道频率响应信息(CFR)进行信号到达角(AOA)估计。其次利用CFR幅值信息通过信号传播模型进行距离估计。提出了一种基于AOA和信号到达时间(TOA)二维聚类信息的直射路径识别算法。最后,利用现有的三天线Wi-Fi设备在室内进行了测角、测距以及定位测试,实验结果表明该文提出的单站定位系统在室内环境下中值误差可以达到1.3 m的定位精度,满足室内定位的需求。Abstract: Single station localization plays an important role in indoor localization. Most of the indoor localization algorithms are combined with multiple Wi-Fi access points (APs) to locate, the localization accuracy is low or even unable to locate when there is only a single AP. In terms of the ubiquitous single AP localization situation, the channel frequency response (CFR) of the commercial three-antenna Wi-Fi network card is used to estimate the angle of arrival (AOA). The CFR amplitude information is applied to estimate the distance from the signal propagation model. Further, we presents a direct path identification algorithm based on the two-dimensional clustering information of AOA and time of arrival (TOA) and use the existing Wi-Fi device with three antennas to measure the angle, distance and localization in the indoor room. The experimental results show that the proposed localization system can achieve a median error of 1.3 m, and can meet the needs of indoor positioning.
-
[1] LI Bing-hao, GALLAGHER T, DEMPSTER A, et al. How feasible is the use of magnetic field alone for indoor positioning[C]//International Conference on Indoor Positioning and Indoor Navigation. Sydney, Australia: [s.n.], 2012: 1-9. http://www.researchgate.net/publication/261310654_How_feasible_is_the_use_of_magnetic_field_alone_for_indoor_positioning?ev=auth_pub [2] ZHUANG Y, YANG J, LI Y, et al. Smartphone-based indoor localization with bluetooth low energy beacons[J]. Sensors, 2016, 16(5):596. doi: 10.3390/s16050596 [3] YANG Bo, LEI Yi-qun, YAN Bei. Distributed multi-human location algorithm using naive bayes classifier for a binary pyroelectric infrared sensor tracking system[J]. IEEE Sensors Journal, 2015, 16(1):1. doi: 10.3390/s16010001 [4] 吴楠, 王旭东, 胡晴晴, 等.基于多LED的高精度室内可见光定位方法[J].电子与信息学报, 2015, 37(3):727-732. http://d.old.wanfangdata.com.cn/Periodical/dzkxxk201503033 WU Nan, WANG Xu-dong, HU Qing-qing, et al. Multiple LED based high accuracy indoor visible light positioning scheme[J]. Journal of Electronics & Information Technology, 2015, 37(3):727-732. http://d.old.wanfangdata.com.cn/Periodical/dzkxxk201503033 [5] 周瑞, 罗磊, 李志强, 等.一种基于智能手机传感器的行人室内定位算法[J].计算机工程, 2016, 42(11):22-26. http://d.old.wanfangdata.com.cn/Periodical/jsjgc201611004 ZHOU Rui, LUO Lei, LI Zhi-qiang, et al. An indoor pedestrian position algorithm based on smartphone sensor[J]. Computer Engineering, 2016, 42(11):22-26. http://d.old.wanfangdata.com.cn/Periodical/jsjgc201611004 [6] WANG C, SHI Z, WU F. Intelligent RFID indoor localization system using a Gaussian filtering based extreme learning machine[J]. Symmetry, 2017, 9(3):30. doi: 10.3390/sym9030030 [7] HUSEN M N, LEE S. Indoor location sensing with invariant Wi-Fi received signal strength fingerprinting[J]. Sensors, 2016, 16(11):1898. doi: 10.3390/s16111898 [8] KEMPKE B, PANNUTO P, CAMPBELL B, et al. Demo: Eavesdropping on polypoint: Scaling high-precision UWB indoor localization[C]//International Conference on Embedded Wireless Systems and Networks. Graz, Austria: Junction Publishing, 2016: 277-278. http://dl.acm.org/citation.cfm?id=2893771 [9] HOENE C, WILLMANN J. Four-way TOA and software-based trilateration of IEEE 802.11 devices[C]//IEEE 19th International Symposium on Personal, Indoor and Mobile Radio Communications.[S.l.]: IEEE, 2008: 1-6. [10] YOUSSEF M, YOUSSEF A, RIEGER C, et al. An asynchronous time-based location determination system[C]//International Conference on Mobile Systems.[S.l.]: ACM, 2006: 165-176. http://www.researchgate.net/publication/228341350_Pinpoint_An_asynchronous_time-based_location_determination_system [11] STUART A G, STEVE B S. Sensor measurements for Wi-Fi location with emphasis on time-of-arrival ranging[C]//IEEE Transactions on Mobile Computing.[S.l.]: IEEE, 2007: 1185-1198. http://www.researchgate.net/publication/3436703_Sensor_Measurements_for_Wi-Fi_Location_with_Emphasis_on_Time-of-Arrival_Ranging [12] SCHMIDT R. Multiple emitter location and signal parameter estimation[J]. IEEE Transactions on Antennas and Propagation, 1986, 34(3):276-280. doi: 10.1109/TAP.1986.1143830 [13] GJENGSET J, XIONG J, MCPHILLIPS G, et al. Phaser: Enabling phased array signal processing on commodity WiFi access points[C]//Proceedings of the 20th Annual International Conference on Mobile Computing and Networking.[S.l.]: ACM, 2014: 153-164. [14] KOTARU M, JOSHI K, BHARADIA D, et al. SpotFi: Decimeter level localization using WiFi[C]//ACM Conference on Special Interest Group on Data Communication.[S.l.]: ACM, 2015: 269-282. [15] XIONG J, JAMIESON K. ArrayTrack: A fine-grained indoor location system[C]//USENIX Conference on Networked Systems Design and Implementation.[S.l.]: USENIX Association, 2013: 71-84. http://www.researchgate.net/publication/262398610_ArrayTrack_a_fine-grained_indoor_location_system [16] NANDAKUMAR R, CHINTALAPUDI K K, PADMANABHAN V N. Centaur: Locating devices in an office environment[C]//Proceedings of the 18th Annual International Conference on Mobile Computing and Networking. New York: ACM, 2012: 281-292. [17] CHINTALAPUDI K, PADMANABHAN I A, PADMANABHAN V N. Indoor localization without the pain[C]//Proceedings of the 16th Annual International Conference on Mobile Computing and Networking. Chicago: ACM, 2010: 173-184. http://www.researchgate.net/publication/220926610_Indoor_localization_without_the_pain [18] SEN S, LEE J, KIM K H, et al. Avoiding multipath to revive inbuilding WiFi localization[C]//Proceeding of the 11th Annual International Conference on Mobile Systems, Applications, and Services.[S.l.]: ACM, 2013: 249-262. [19] LAXMIKANTH P, SURENDRA L, RATNAM D V, et al. Enhancing the performance of AOA estimation in wireless communication using the MUSIC algorithm[C]//Signal Processing and Communication Engineering Systems. Guntur, India: IEEE, 2015: 448-452. [20] HALPERIN D, HU W, SHETH A, et al. Tool release:Gathering 802.11n traces with channel state information[J]. ACM Sigcomm Computer Communication Review, 2011, 41(1):53. doi: 10.1145/1925861.1925870 [21] XIE Y, LI Z, LI M. Precise power delay profiling with commodity WIFI[C]//International Conference on Mobile Computing and Networking.[S.l.]: ACM, 2015: 53-64. http://www.researchgate.net/publication/299908493_Precise_Power_Delay_Profiling_with_Commodity_WiFi [22] ESCUDERO G, HWANG J G, PARK J G. An indoor positioning method using IEEE 802.11 channel state information[J]. Journal of Electrical Engineering & Technology, 2017, 12(3):1286-1291. [23] 王开军, 张军英, 李丹, 等.自适应仿射传播聚类[J].自动化学报, 2007, 33(12):1242-1246. http://d.old.wanfangdata.com.cn/Periodical/zdhxb200712002 WANG Kai-jun, ZHANG Jun-ying, LI Dan, et al. Adaptive affinity propagation clustering[J]. Acta Automatica Sinica, 2007, 33(12):1242-1246. http://d.old.wanfangdata.com.cn/Periodical/zdhxb200712002 [24] 程梦驹, 赵龙, 陶洪波, 等.一种基于仿射传播聚类的入侵检测方法[J].无线电工程, 2013, 43(11):4-7. doi: 10.3969/j.issn.1003-3106.2013.11.002 CHENG Meng-ju, ZHAO Long, TAO Hong-bo, et al. An intrusion detection approach based on affinity propagation clustering[J]. Radio Engineering, 2013, 43(11):4-7. doi: 10.3969/j.issn.1003-3106.2013.11.002 [25] TAN P N, MICHAEL S, VIPIN K.数据挖掘导论[M].北京:人民邮电出版社, 2011. TAN P N, MICHAEL S, VIPIN K. Introductin to data[M]. Beijing: Posts and Telecom Press, 2011. [26] SEN S, LEE J, KIM K H, et al. Avoiding multipath to revive inbuilding WiFi localization[C]//Proceeding of the International Conference on Mobile Systems, Applications, and Services.[S.l.]:IEEE Computer Society, 2013:249-262. http://www.researchgate.net/publication/262317935_Avoiding_multipath_to_revive_inbuilding_WiFi_localization [27] WU K, XIAO J, YI Y, et al. CSI-based indoor localization[J]. IEEE Transactions on Parallel and Distributed Systems, 2013, 24(7): 1300-1309. doi: 10.1109/TPDS.2012.214 [28] MARIAKAKIS A T, SEN S, LEE J, et al. Sail:Single access point-based indoor localization[C]//Proceedings of the 12th Annual International Conference on Mobile Systems, Applications, and Services.[S.l.]:ACM, 2014:315-328. -

 点击查看大图
点击查看大图
图(11)
计量
- 文章访问数: 5180
- HTML全文浏览量: 1927
- PDF下载量: 160
- 被引次数: 0
