 ISSN
ISSN 


-
近年来随着电磁干扰相关技术在战场中的成熟应用[1],有源干扰系统可以用较低成本发射大量欺骗式信号对雷达进行欺骗式干扰。其中,距离欺骗干扰因其高性价比而成为一种主要的欺骗样式。干扰机截获、存储雷达发射信号后,转发带有一定时延的雷达发射信号,在雷达与目标连线上形成具有一定欺骗距离的欺骗式假目标[2-6],从而迷惑了雷达对真目标的检测,严重影响雷达探测、定位、跟踪等功能,导致雷达使用方在局部电子战中处于不利态势,因此雷达工作者对如何对抗欺骗式假目标干扰的研究日渐深入。
针对战场中雷达面临的日趋严峻的生存问题,文献[7-9]总结概述了当今组网雷达发展的现状,在当今信息化条件下,组网雷达系统可以构成全方位、立体化、多层次的探测体系,在对抗欺骗式假目标干扰时具备更大优势。文献[10]提出了一种同构组网雷达系统利用真假目标空间相关性差异进行真假目标鉴别的方法,在保证真目标鉴别概率的同时可降低假目标的欺骗概率。但在真实战场环境中,同构组网雷达体系需保证所有雷达站均为同一体制,构建条件苛刻,此时,则需考虑构建异构组网雷达体系,对已有的抗欺骗式干扰方法进行补充。
根据量测信息维度不同,雷达在体制上可以分为两坐标雷达和三坐标雷达[11],两坐标雷达由于价格低廉、操作复杂度较低[12]等优点被大量使用,但是在融合定位计算目标的高度信息时,所带来的融合误差也是不可避免的[13]。三坐标雷达能够同时测量目标的方位、俯仰(或高度)和距离三维信息,是防空系统的主要雷达品种,在信号处理方面,三坐标雷达已普遍采用脉冲压缩、脉间和脉组捷变频、频率分集等信号处理技术,使三坐标雷达具有大的观察空域、高的数据率、较高的量测精度以及能够同时处理多批目标的能力[14]。但三坐标雷达装备和维护成本较高,若组网雷达系统中节点雷达全为三坐标雷达,则增加了组网雷达系统配置的技术复杂度[15]。如果将两坐标雷达与三坐标雷达相结合形成异构组网雷达系统,两种不同类型的雷达可以进行优势互补,在增加组网雷达配置多样性和稳定性的同时增加了武器装备的利用率。
针对以上分析,本文提出了一种异构组网雷达抗欺骗式假目标方法,将两坐标雷达和三坐标雷达两种不同体制的雷达连接成网,在增强抗干扰算法多样性的同时,进一步贴近真实作战环境。通过仿真实验表明本文算法可以有效地鉴别欺骗式假目标,并分析了欺骗距离、目标量测个数和雷达测角精度对算法鉴别概率的影响。
-
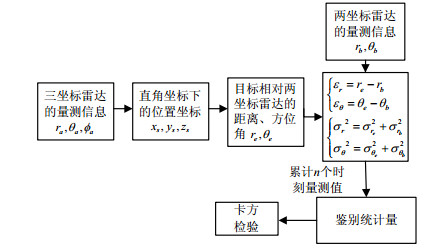
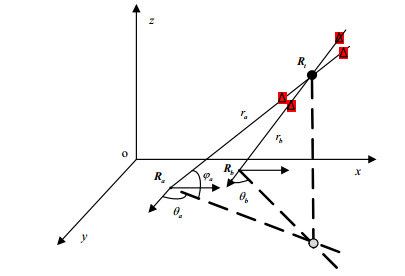
不失一般性,假设异构组网雷达系统由一部两坐标雷达和一部三坐标雷达组成,且两部雷达同时对目标所在的空域进行探测,自卫式干扰机接收到雷达发射的探测信号后,对信号进行延时转发,以至雷达接收到的回波为真实目标回波和具有不同时延的假目标回波,从而达到对各节点雷达实施距离欺骗干扰的目的。组网雷达及真假目标的空间位置可参考图 1。

图 1 组网雷达分布及真假目标信息图
设组网雷达系统中三坐标雷达位置坐标为${{\mathit{\boldsymbol{R}}}_a} = [{x_a}, {y_a}, {z_a}]$,两坐标雷达位置坐标为${{\mathit{\boldsymbol{R}}}_b} = [{x_b}, {y_b}, {z_b}]$,目标位置坐标为${{\mathit{\boldsymbol{R}}}_t} = [{x_t}, {y_t}, {z_t}]$。假设三坐标雷达检测到的目标参数为$[{r_a}, {\theta _a}, {\varphi _a}]$,两坐标雷达检测到的目标参数为$[{r_b}, {\theta _b}]$,其中,$r_{a}、 \theta_{a}、 \varphi_{a}$分别为目标相对于三坐标雷达的距离、方位角和俯仰角信息,${r_b}、{\theta _b}$为目标相对于两坐标雷达的距离和方位角信息。
由三坐标雷达的量测值可以计算得到目标在直角坐标系下的位置坐标${{\mathit{\boldsymbol{R}}}_{\mathit{\boldsymbol{s}}}} = {[{x_s}, {y_s}, {z_s}]^T}$,具体计算为:
$$\left\{ \begin{array}{l} {x_s} = {x_a} + {r_a}\cos {\theta _a}\cos {\phi _a} \\ {y_s} = {y_a} + {r_a}\sin {\theta _a}\cos {\phi _a} \\ {z_s} = {z_a} + {r_a}\sin {\phi _a} \\ \end{array} \right.$$ (1) 这时,将目标的位置坐标变换到以两坐标雷达为中心的量测球坐标系下,可计算得到目标相对两坐标雷达信息的计算值${\mathit{\boldsymbol{Z}}} = [{r_e}, {\theta _e}]$,其中${r_e}$为距离计算值,${\theta _e}$为方位角计算值,具体计算公式如下:
$$\left\{ \begin{array}{l} {r_e} = \sqrt {{{({x_s} - {x_b})}^2} + {{({y_s} - {y_b})}^2} + {{({z_s} - {z_b})}^2}} \\ {\theta _e} = \arctan \frac{{{y_s} - {y_b}}}{{{x_s} - {x_b}}} \\ \end{array} \right.$$ (2) 目标相对两坐标雷达的距离、方位角信息的计算值${r_{\rm{e}}}$、${\theta _{\rm{e}}}$的联合方差为:${\mathit{\boldsymbol{P}}} = {\rm{E}}[{\rm{d}}{\mathit{\boldsymbol{Z}}}{(d{\mathit{\boldsymbol{Z}}})^{\rm{T}}}] = {\mathit{\boldsymbol{T}}}{{\mathit{\boldsymbol{ \boldsymbol{\varLambda} }}}_1}{{\mathit{\boldsymbol{T}}}^{\rm{T}}}$,其中:${{\mathit{\boldsymbol{ \boldsymbol{\varLambda} }}}_1} = {\rm{diag}}(\sigma _{{r_a}}^2, \sigma _{{\theta _a}}^2, \sigma _{{\phi _a}}^2)$;${\sigma _{{r_a}}}$、${\sigma _{{\theta _a}}}$、${\sigma _{{\phi _a}}}$分别表示三坐标雷达的距离、方位角和俯仰角的量测误差,均为相互独立的零均值高斯分布随机变量,将式(2)两边微分得到转换矩阵${\mathit{\boldsymbol{T}}}$为:
$${\mathit{\boldsymbol{T}}} = \left[ {\begin{array}{*{20}{c}} \begin{gathered} \frac{{\partial {r_e}}}{{\partial {r_a}}} \\ \frac{{\partial {\theta _e}}}{{\partial {r_a}}} \\ \end{gathered} &\begin{gathered} \frac{{\partial {r_e}}}{{\partial {\theta _a}}} \\ \frac{{\partial {\theta _e}}}{{\partial {\theta _a}}} \\ \end{gathered} &\begin{gathered} \frac{{\partial {r_e}}}{{\partial {\phi _a}}} \\ \frac{{\partial {\theta _e}}}{{\partial {\phi _a}}} \\ \end{gathered} \end{array}} \right]$$ (3) 式中,
$$\frac{{\partial {r_e}}}{{\partial {r_a}}} = \frac{{\partial {r_e}}}{{\partial {x_s}}}\cos {\theta _a}\cos {\varphi _a} + \sin {\theta _a}\left( {\frac{{\partial {r_e}}}{{\partial {y_s}}}\cos {\varphi _a} + \frac{{\partial {r_e}}}{{\partial {z_s}}}} \right)$$ (4) $$\frac{{\partial {r_e}}}{{\partial {\theta _a}}} = {r_a}\cos {\varphi _a}\left( { - \frac{{\partial {r_e}}}{{\partial {x_s}}}\sin {\theta _a} + \frac{{\partial {r_e}}}{{\partial {y_s}}}\cos {\theta _a}} \right)$$ (5) $$\frac{{\partial {r_e}}}{{\partial {\phi _a}}} = {r_a}\cos {\theta _a}\left( { - \frac{{\partial {r_e}}}{{\partial {x_s}}}\sin {\varphi _a} + \frac{{\partial {r_e}}}{{\partial {y_s}}}\sin {\theta _a} + \frac{{\partial {r_e}}}{{\partial {z_s}}}} \right)$$ (6) $$\frac{{\partial {\theta _e}}}{{\partial {r_a}}} = \cos {\phi _a}\frac{{({x_s} - {x_b})\sin {\theta _a} - ({y_s} - {y_b})\cos {\theta _a}}}{{{{({x_s} - {x_b})}^2} + {{({y_s} - {y_b})}^2}}}$$ (7) $$\frac{{\partial {\theta _e}}}{{\partial {\theta _a}}} = \cos {\phi _a}{r_a}\frac{{({x_s} - {x_b})\cos {\theta _a} + ({y_s} - {y_b})\sin {\theta _a}}}{{{{({x_s} - {x_b})}^2} + {{({y_s} - {y_b})}^2}}}$$ (8) $$\frac{{\partial {\theta _e}}}{{\partial {\phi _a}}} = \cos {\theta _a}\sin {\phi _a}\frac{{ - ({x_s} - {x_b}) + ({y_s} - {y_b}){r_a}}}{{{{({x_s} - {x_b})}^2} + {{({y_s} - {y_b})}^2}}}$$ (9) 构造三坐标雷达检测得到的目标位置相对两坐标雷达的距离、方位角信息的计算值与量测值的二维差值记为矩阵,其误差协方差矩阵为:
$${\mathit{\boldsymbol{Q = P + }}}{{\mathit{\boldsymbol{ \boldsymbol{\varLambda} }}}_2}$$ (10) 式中,${{\mathit{\boldsymbol{ \boldsymbol{\varLambda} }}}_{\rm{2}}} = {\rm{diag}}(\sigma _{{r_b}}^2, \sigma _{{\theta _b}}^2)$;${\sigma _{{r_b}}}$、${\sigma _{{\theta _b}}}$分别为两坐标雷达的距离、方位角量测误差,均为相互独立的零均值高斯分布随机变量。
-
根据第1节的理论分析可知,节点雷达的量测误差服从相互独立的零均值高斯分布,因此,距离计算值${r_{\rm{e}}}$、方位角计算值${\theta _{\rm{e}}}$及计算值与量测值的差值$\Delta r = {r_e} - {r_b}$、$\Delta \theta = {\theta _e} - {\theta _b}$也近似服从高斯分布。构造检验统计量$\Delta = {\mathit{\boldsymbol{\varepsilon }}}{{\mathit{\boldsymbol{Q}}}^{ - 1}}{{\mathit{\boldsymbol{\varepsilon }}}^T}$,若该检测目标为真目标,在不考虑系统误差,样本数为$n$时,$\Delta $服从自由度为$2n$的卡方分布,根据要求的假目标误判概率,即真实目标被误判为假目标的概率,可以设定显著性水平$\alpha $,进而得到判决门限:
$$\eta = \chi _{1 - \alpha }^2(2n)$$ (11) 由于干扰机无法对两坐标雷达和三坐标雷达进行协同干扰,因此对于假目标而言,三坐标雷达与两坐标雷达对应的假目标量测值空间分散,上述推导的卡方分布失效。由以上分析可知,可用卡方检验法进行真假目标鉴别。判定规则为:若$\Delta \leqslant \eta $,则判定检验统计量对应的量测值为真目标;若$\Delta > \eta $,则判定检验统计量对应的量测值为假目标,由此完成对真假目标的鉴别。
在量测过程中,两坐标雷达可提供距离和方位角两维目标量测信息,假设组网雷达系统的通信系统的传输带宽及传输速率可以使节点雷达之间实现时间对齐,联合利用距离和方位角信息,构造二维差值${\mathit{\boldsymbol{\varepsilon }}}$,即可利用检验统计量$\Delta $通过卡方检验对真假目标进行鉴别,具体步骤如图 2所示。

图 2 算法流程图
-
以一个三坐标雷达和一个两坐标雷达构成的组网雷达系统为仿真背景,目标为一个正在运动的导弹,以导弹攻击位置为原点,起始位置为[82 206, 0, 80 000] m,根据实际的雷达布站位置可计算出ECF坐标系下各雷达站参数,假设导弹速度2 km/s,以38.9°的倾角往正西方向发射。两坐标雷达与三坐标雷达采样间隔均为1 s。各雷达量测参数如表 1所示。
表 1 节点雷达参数信息
位置坐标/m 测距精度/m 方位角精度/° 俯仰角精度/° ${{\mathit{\boldsymbol{R}}}_{\rm{a}}}$ [10 089, 0, 0] 25 0.1 0.15 ${{\mathit{\boldsymbol{R}}}_{\rm{b}}}$ [11 770, -12 771, 260] 25 0.2 为了掩护导弹不被发现,假设干扰机在导弹前后各产生1个具有一定欺骗距离的欺骗式假目标。仿真中设定允许的漏鉴别概率(真目标判别为假目标的概率)为5%,分别利用距离统计量、方位角统计量和方位角-距离联合统计量构造检验统计量对真假目标进行鉴别,通过进行10万次Monte Carlo仿真实验,统计3种方法对真假目标的鉴别效果。
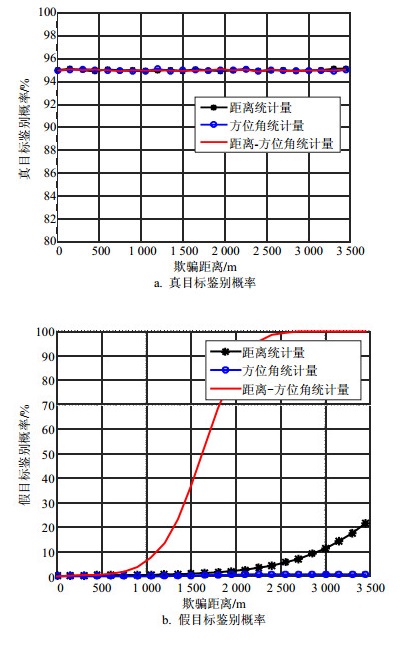
图 3分别给出了假目标欺骗距离不同的情况下,3种鉴别方法对真假目标鉴别概率的变化图。

图 3 欺骗距离对检测效果的影响
由图 3a可得:3种鉴别方法对真目标的鉴别概率不受欺骗距离影响,基本保持在95%左右。由图 3b可得:欺骗距离对假目标的鉴别概率有较大影响,尤其在假目标欺骗距离较小时,仅利用目标的一维量测信息难以实现对假目标的鉴别,此时联合利用距离和方位角统计量可明显提高对假目标的鉴别概率。
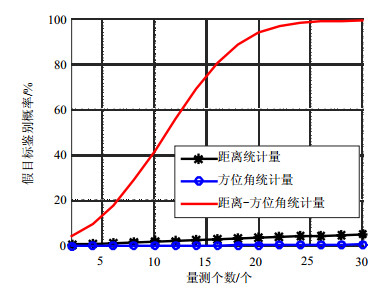
选择具有较好鉴别效果的欺骗距离(2 500 m)后,通过改变目标量测个数,观测目标量测个数对鉴别效果的影响。图 4给出了用于鉴别假目标的样本个数不同的情况下,3种方法对假目标鉴别概率变化图。

图 4 目标量测个数对检测效果的影响
由图 4可得:随着目标量测个数的增加,基于距离统计量的鉴别方法对假目标的鉴别概率缓慢增加,远不如基于距离-方位角联合统计量的鉴别方法对假目标的鉴别概率升高情况明显,表明用该方法在进行真假目标鉴别时,观测样本数量对假目标的鉴别概率有重要的影响,且联合利用目标的距离和方位角量测信息在低量测个数条件下,对假目标的鉴别概率明显高于其他方法。
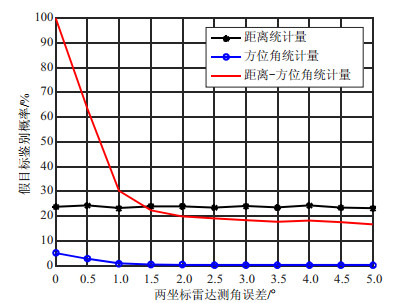
图 5给出了两坐标雷达角度量测标准差不同的情况下,3种鉴别方法对假目标的鉴别概率变化图。

图 5 两坐标雷达测角误差对检测效果的影响
由图 5可得:首先,测角误差对于方位角统计量影响最大,假目标几乎全部误鉴;其次,测角误差对基于距离统计量的鉴别方法几乎没有影响,因为物理意义上,角度统计量对目标回波空间距离没有影响;最后距离-方位角联合统计量的鉴别方法对两坐标雷达测角误差较敏感,在误差较小时,优于其他两种方法,随着两坐标雷达角度量测标准差的增大,联合算法的性能逐渐降低,最终低于仅依靠距离统计量的鉴别方法。综上所述,提高两坐标雷达测角精度可明显升高联合算法中假目标鉴别概率。
从3组仿真实验中可以看出,将两坐标雷达和三坐标雷达连接成网,用相关算法进行真假目标鉴别时,真目标的鉴别概率较高,可以达到预设的期望值。基于距离-方位角联合统计量的鉴别方法性能优于其他两种算法,鉴别过程中,可以通过增加量测样本个数、提高两坐标雷达测角精度的方法以增加假目标鉴别概率。文中所提算法均假设组网雷达系统中各节点雷达可以实现时间对齐,且未考虑系统误差对算法的影响,在后续研究工作中,上述因素将被考虑以提高算法鲁棒性。
-
针对组网雷达对抗欺骗式假目标干扰,本文提出的算法将两坐标雷达和三坐标雷达两种不同体制的雷达连接成网,利用三坐标雷达量测值对目标进行定位后,再用两坐标雷达中量测值与计算值的差值实现对真假目标的鉴别,同时分析了对假目标鉴别概率影响较大的因素。在保证真目标鉴别概率时,可以通过有效措施获得较高的假目标鉴别概率,在现实场景中具有较高的应用价值。
A Method against Deception-False-Target Jamming Based on Isomerous Netted Radars
-
摘要: 同构体系下组网雷达配置方式简单,抗欺骗式假目标算法单一。该文提出一种异构组网雷达系统抗欺骗式假目标方法,对于既包含两坐标雷达又包含三坐标雷达的异构组网雷达系统,首先利用三坐标雷达对目标进行定位,计算目标相对于两坐标雷达的距离、方位角信息。然后,将该计算值与两坐标雷达对目标的量测值进行比较,通过构造卡方检验对真假目标进行有效鉴别。仿真结果表明,该算法可以有效地鉴别欺骗式假目标,并分析了欺骗距离、目标量测个数和雷达测角精度对算法鉴别概率的影响。Abstract: The existing algorithm against deception-false-target by homogeneous radar system is single due to the simplicity of configured mode. To solve the problem, a method against deception-false-target based on isomerous netted radars is proposed. The isomerous netted radars in this paper consists of 3D radar and 2D radar. The distance and azimuth information between target and 2D radar are estimated by making use of the measurement of 3D radar. By comparing the estimated values with the measurements of 2D radar, the false-target can be discriminated by using chi-square statistics. We further analyze the influence of the distance of deception distance, observation frequency, the 2D radar accuracy on algorithm's discrimination probability. Simulation results show that the proposed method is efficacious in discriminating the false-target jamming.
-
表 1 节点雷达参数信息
位置坐标/m 测距精度/m 方位角精度/° 俯仰角精度/° ${{\mathit{\boldsymbol{R}}}_{\rm{a}}}$ [10 089, 0, 0] 25 0.1 0.15 ${{\mathit{\boldsymbol{R}}}_{\rm{b}}}$ [11 770, -12 771, 260] 25 0.2  下载: 导出CSV
下载: 导出CSV
-
[1] STAVROULAKIS P, FARSARIS N, XENOS T D. Anti-jamming transmitter independent radarnetworks[C]//International Conference on Signal processing, Communications and Networking. Chennai, Indina: IEEE, 2008: 269-273. [2] HUANG C, CHEN Z, DUAN R. Novel discrimination algorithm for deceptive jamming in polarimetric radar[C]//Proceedings of the 2012 International Conference on Information Technology and Software Engineering. Berlin: Springer, 2013: 359-365. [3] LU G, TANG B, GUI G. Deception ECM signals cancellation processor with joint time-frequency pulse diversity[J]. IEICE Electronics Express, 2011, 8(19):1608-1613. doi: 10.1587/elex.8.1608 [4] LI S Y, ZHANG L R, LIU N, et al. Adaptive detection with conic rejection to combat possible deceptive jamming for frequency diverse MIMO radar[J]. Digital signal processing, 2017, 69:32-40. doi: 10.1016/j.dsp.2017.06.008 [5] 刘洁怡, 张林让, 赵珊珊, 等.一种考虑站址误差的抗欺骗式假目标方法[J].西安交通大学学报, 2017, 51(6):54-58. http://d.old.wanfangdata.com.cn/Periodical/xajtdxxb201706009 LIU Jie-yi, ZHANG Lin-rang, ZHAO Shan-shan, et al. A method against deception-false-target jamming based on position error[J]. Journal of XI'AN Jiaotong University, 2017, 51(6):54-58. http://d.old.wanfangdata.com.cn/Periodical/xajtdxxb201706009 [6] 赵艳丽, 王雪松, 王国玉, 等.多假目标欺骗干扰下组网雷达跟踪技术[J].电子学报, 2007, 35(3):454-458. doi: 10.3321/j.issn:0372-2112.2007.03.014 ZHAO Yan-li, WANG Xue-song, WANG Guo-yu, et al. Tracking technique for radar network in the presence of Multi-Range-False-Target deception jamming[J]. Acta Electronica Sinica, 2007, 35(3):454-458 doi: 10.3321/j.issn:0372-2112.2007.03.014 [7] 张林让, 赵珊珊, 周宇, 等.网络化雷达协同抗欺骗式干扰技术研究进展[J].数据采集与处理, 2014, 29(4):516-525. doi: 10.3969/j.issn.1004-9037.2014.04.005 ZHANG Lin-rang, ZHAO Shan-shan, ZHOU Yu, et al. Research advance on cooperative anti-deception jamming in netted radar[J]. Journal of Data Acquisition and Processing, 2014, 29(4):516-525. doi: 10.3969/j.issn.1004-9037.2014.04.005 [8] 姜秋喜.网络雷达对抗系统导论[M].北京:国防工业出版社, 2010. JIANG Qiu-xi. Netted radar countermeasures system introduction[M]. Beijing:National Defense Industry Press, 2010. [9] 刘洁怡, 张林让, 赵珊珊, 等.欺骗式干扰下组网雷达优化布站方法分析与仿真[J].电子科技大学学报, 2017, 46(4):513-519. doi: 10.3969/j.issn.1001-0548.2017.04.006 LIU Jie-yi, ZHANG Lin-rang, ZHAO Shan-shan, et al. Analysis and simulation of optimal deployment for netted radar under deception jamming[J]. Journal of University of Electronic Science and Technology of China, 2017, 46(4):513-519. doi: 10.3969/j.issn.1001-0548.2017.04.006 [10] 赵珊珊, 张林让, 周宇, 等.组网雷达点迹信息融合抗假目标干扰方法[J].电子科技大学学报, 2014, 43(2):207-211. doi: 10.3969/j.issn.1001-0548.2014.02.009 ZHAO Shan-shan, ZHANG Lin-rang, ZHOU Yu, et al. Measurement fusion method against false-target jamming for radar network[J]. Journal of University of Electronic Science and Technology of China, 2014, 43(2):207-211. doi: 10.3969/j.issn.1001-0548.2014.02.009 [11] 唐利娜, 吴少鹏.航母舰载三坐标雷达发展现状及其发展特点[J].雷达与对抗, 2012, 32(4):1-4. doi: 10.3969/j.issn.1673-9167.2012.04.001 TANG Li-na, WU Shao-peng. The status quo and development characteristics of shipborne 3D radars on carriers[J]. Radar &ECM, 2012, 32(4):1-4. doi: 10.3969/j.issn.1673-9167.2012.04.001 [12] 张华睿, 杨宏文, 郁文贤.两坐标雷达融合定位算法[J].系统工程与电子技术, 2012, 34(1):75-79. doi: 10.3969/j.issn.1001-506X.2012.01.14 ZHANG Hua-rui, YANG Hong-wen, YU Wen-xian. Estimation of target position in 2-D radar based on data fusion[J]. Systems Engineering and Electronics, 2012, 34(1):75-79. doi: 10.3969/j.issn.1001-506X.2012.01.14 [13] 孙仲康.单多基地有源无源定位技术[M].北京:国防工业出版社, 1996. Sun Zhong-kang. Active and passive location technology for monostatic/multistatic radar[M]. Beijing:National Defense Industry Press, 1996. [14] 何友.雷达数据处理及应用[M].北京:电子工业出版社, 2013. HE You. Radar data processing with applications[M]. Beijing:Publishing House of Electronics Industry, 2013. [15] 严俊坤, 夏双志, 戴奉周, 等.基于单部两坐标雷达的目标三维定位算法[J].电波科学学报, 2013, 28(3):405-411. http://d.old.wanfangdata.com.cn/Periodical/dbkxxb201303001 YAN Jun-kun, XIA Shuang-zhi, DAI Feng-zhou, et al. 3D target localization based on 2D radar[J]. Chinese Journal of Radio Science, 2013, 28(3):405-411. http://d.old.wanfangdata.com.cn/Periodical/dbkxxb201303001 -

 点击查看大图
点击查看大图
图(5) / 表(1)
计量
- 文章访问数: 4218
- HTML全文浏览量: 1517
- PDF下载量: 126
- 被引次数: 0
