 ISSN
ISSN 



-
海马结构是动物大脑中参与空间感知、记忆和导航的重要区域,其内部包括网格细胞(grid cell)[1]、位置细胞(place cell)[2]、头朝向细胞(head direction cell)[3]等多种与空间导航有关的细胞,是认知地图功能环路的核心部分[4]。大脑导航所具有的空间感知、记忆和导航能力,为运行体自主导航技术的发展提供了重要借鉴。文献[5]基于内嗅皮层-海马体环路实现了运行体导航认知图的同步构建。RatSLAM[6]是一种通过模拟鼠类视觉感知和自主导航机制实现同步定位与地图构建的技术,它能够使运行体在陌生空间中自主完成空间地图的构建和定位[7]。在传统RatSLAM的基础上,文献[8]提出了一种基于海马认知机理的认知地图构建方法,更加准确地体现了生物在导航中的生理学现象和认知功能,为仿海马认知机理的机器人导航方法研究奠定了基础。
位于海马结构中间内嗅皮层区域的网格细胞是一种与空间导航有关的重要神经元细胞。当成年大鼠在空间内自由活动时,网格细胞具有规律的等边六边形放电野。网格细胞被发现后,大量的动物实验和理论分析被用于其放电特性和放电机理的研究,并提出了多种仿真模型,包括连续吸引子网络(continuous attractor network, CAN)模型[9]、振荡干涉(oscillatory interference)模型[10]、自组织(self- organization)模型[11]等。虽然没有一种模型能够完美地解释网格细胞的放电特性和放电机理,但是各种模型的不断发展以及模型间的相互融合[12]有效地促进了人们对网格细胞以及动物大脑导航机理的认识和理解。
网格细胞是海马结构以及大脑导航环路的重要组成部分[13]。当仅考虑自运动信息时,网格细胞在黑暗环境中依然可以规律放电并完成路径整合,此时的网格细胞可自主完成导航功能[14],类似于现有的惯性导航系统;当进一步考虑传感器皮层输入时,网格细胞与其他大脑区域共同完成导航功能[15],类似于现有的“惯性导航+非自主导航”的组合导航系统。网格细胞具有矢量导航能力[16]。谷歌DeepMind团队分别利用卷积神经网络、循环神经网络和强化学习模拟大脑的图像处理、网格细胞放电和路径规划功能,使运行体具有空间认知、最优路径规划以及陌生环境自主导航的矢量导航能力,该矢量导航能力是现有导航方式所不具备的。实验表明,基于网格细胞编码的路径规划比基于位置细胞编码的路径规划具有更高的定位精度。
网格细胞连续吸引子网络模型表征同一模块内网格细胞的集体行为,对网格细胞进行放电率编码。现有的网格细胞连续吸引子网络模型虽然有效地模拟了网格细胞的放电率特性,但是模型中兴奋性网格细胞的各个抑制性输入权重均为非正数;兴奋性网格细胞的抑制性输入还存在权重和为负数、同时部分权重为非负数的可能,现有模型缺少对这种可能性的研究。本文利用自然界中普遍存在的反应-扩散(reaction diffusion)机制[18],对兴奋性网格细胞存在非负抑制权重的情况进行研究分析,构建连续吸引子网络模型,得到形成网格细胞放电野所需的突触联接方式、放电率非线性限制和自运动信息响应方式,为类脑导航系统的构建提供了借鉴。
-
假设网格细胞可分为兴奋性网格细胞和抑制性网格细胞,兴奋性网格细胞向抑制性网格细胞输出激励信号,抑制性网格细胞分别向兴奋性网格细胞和抑制性网格细胞输出抑制信号[19]。根据反应-扩散机制,二维空间$[x, y]$中线性化的网格细胞放电率关系为:
$$\left\{ \begin{array}{l} \tau \frac{{\partial {R_I}}}{{{\rm{d}}t}} = - {B_{\rm{I}}}{R_{\rm{I}}} + ({w_{{\rm{EI}}}}{R_{\rm{E}}} + {w_{{\rm{II}}}}{R_{\rm{I}}} + {S_{\rm{I}}}) \\ \tau \frac{{\partial {R_E}}}{{{\rm{d}}t}} = - {B_{\rm{E}}}{R_{\rm{E}}} + ({w_{{\rm{IE}}}}{R_{\rm{I}}} + {S_{\rm{E}}}) \\ \end{array} \right.$$ (1) 式中,方程等号右侧第一项为反应项,第二项为扩散项;$\tau $为神经元响应时间常数;${R_{\rm{I}}}$、${R_{\rm{E}}}$分别为抑制性网格细胞和兴奋性网格细胞的放电率;${B_{\rm{I}}}$、${B_{\rm{E}}}$分别为抑制性网格细胞和兴奋性网格细胞的反应系数;${w_{{\rm{EI}}}}$、${w_{{\rm{II}}}}$、${w_{{\rm{IE}}}}$分别为兴奋性-抑制性、抑制性-抑制性、抑制性-兴奋性网格细胞群间的突触联接权重;${S_{\rm{I}}}$、${S_{\rm{E}}}$分别为抑制性网格细胞和兴奋性网格细胞的扩散常数。
式(1)存在稳定的线性解,此时网格细胞群具有均匀分布的放电率,当各细胞放电率存在细微扰动时,放电率将重新分布,重新分布后的放电率可表示为:
$$\begin{gathered} \left( \begin{gathered} {R_{\rm{E}}}({\mathit{\boldsymbol{r}}}, t) \\ {R_{\rm{I}}}({\mathit{\boldsymbol{r}}}, t) \\ \end{gathered} \right) = {\mathit{\boldsymbol{V}}}\exp (\lambda t + {\rm{i}}{\mathit{\boldsymbol{kr}}}) = \\ {\mathit{\boldsymbol{V}}}\exp (\lambda t + {\rm{i}}{k_1}x + {\rm{i}}{k_2}y) \\ \end{gathered} $$ (2) 式中,${\mathit{\boldsymbol{k}}} = [{k_1}, {k_2}]$为波矢;${k_1}$、${k_2}$分别为$x$方向和$y$方向的波数;$\lambda $为色散关系式,决定了分布图案的形式,当$\operatorname{Re} (\lambda ) < 0$时,分布为线性稳定的,当$\operatorname{Re} (\lambda ) > 0$时,分布为线性非稳定的。
将式(2)代入式(1),并且将$\exp (\lambda t + {\rm{i}}{\mathit{\boldsymbol{kr}}})$约去,可得$\lambda ({\mathit{\boldsymbol{k}}})$的特征多项式为:
$$\left| {\begin{array}{*{20}{c}} {{W_{{\rm{EI}}}}({\mathit{\boldsymbol{k}}})}&{ - \tau \lambda - {B_{\rm{I}}} + {W_{{\rm{II}}}}({\mathit{\boldsymbol{k}}})} \\ { - \tau \lambda - {B_{\rm{E}}}}&{{W_{{\rm{IE}}}}({\mathit{\boldsymbol{k}}})} \end{array}} \right| = 0$$ (3) 即:
$$\left\{ \begin{gathered} {\lambda _ \pm }({\mathit{\boldsymbol{k}}}) = \frac{{ - {C_2}({\mathit{\boldsymbol{k}}}) \pm \sqrt {{C_2}^2({\mathit{\boldsymbol{k}}}) - 4{C_1}{C_3}({\mathit{\boldsymbol{k}}})} }}{{2{C_1}}} \\ {C_1} = {\tau ^2} \\ {C_2}({\mathit{\boldsymbol{k}}}) = \tau ({B_{\rm{I}}} + {B_{\rm{E}}} - {W_{{\rm{II}}}}({\mathit{\boldsymbol{k}}})) \\ {C_3}({\mathit{\boldsymbol{k}}}) = {B_{\rm{I}}}{B_{\rm{E}}} - {B_{\rm{E}}}{W_{{\rm{II}}}}({\mathit{\boldsymbol{k}}}) - {W_{{\rm{EI}}}}({\mathit{\boldsymbol{k}}}){W_{{\rm{IE}}}}({\mathit{\boldsymbol{k}}}) \\ \end{gathered} \right.$$ (4) -
为了使网格细胞群产生稳定的等边六边形图案的放电率分布,需要两个关键条件:
1) ${\lambda _ \pm }({\mathit{\boldsymbol{k}}})$具备以下3个条件:① $\operatorname{Re} {\lambda _ \pm }(0) < 0$;② $\operatorname{Re} {\lambda _ \pm }({\mathit{\boldsymbol{k}}} \to \infty ) < 0$;③存在有限范围的${k_{{\rm{down}}}} < $ $k < {k_{{\rm{up}}}}$,使得$\operatorname{Re} {\lambda _ + }(k) > 0$。
2) 式(1)中存在放电率的非线性限制。
这两个条件主要由网格细胞群突触联接权重决定。通常情况下,网格细胞群突触联接权重关系为:
$$\begin{gathered} w({\mathit{\boldsymbol{r}}}) = \sum\limits_m {{a_m}\exp [ - {b_m}({x^2} + {y^2})]} \Rightarrow \\ W({\mathit{\boldsymbol{k}}}) = \sum\limits_m {{a_m}\frac{\pi }{{{b_m}}}\exp ( - {{{k^2}} \mathord{\left/ {\vphantom {{{k^2}} {4{b_m}}}} \right. } {4{b_m}}})} \\ {k^2} = k_1^2 + k_2^2 \\ \end{gathered} $$ (5) 根据细胞群的兴奋、抑制特性,对突触联接权重进行约束,定义松约束、紧约束两种约束条件。
松约束为:
$$ \left\{ {\begin{array}{*{20}{l}} {\sum\limits_j {{w_{j \to i}}} ({\mathit{\boldsymbol{r}}}) < 0}&{j \in \left\{ {抑制性网格细胞群} \right\}}\\ {\sum\limits_j {{w_{j \to i}}} ({\mathit{\boldsymbol{r}}}) > 0}&{j \in \left\{ {兴奋性网格细胞群} \right\}} \end{array}} \right. $$ (6) 紧约束为:
$$ \left\{ {\begin{array}{*{20}{l}} {{w_{j \to i}}({\mathit{\boldsymbol{r}}}) < 0}&{j \in \left\{ {抑制性网格细胞群} \right\}}\\ {{w_{j \to i}}({\mathit{\boldsymbol{r}}}) > 0}&{j \in \left\{ {兴奋性网格细胞群} \right\}} \end{array}} \right. $$ (7) 紧约束是松约束的一个真子集,本文主要对松约束内非紧约束条件进行研究。根据条件1),此时松约束条件下各种突触联接关系可分别表示为以下形式:
1) 抑制性网格细胞至抑制性网格细胞:
$${w_{j \to i}} = {a_1}\exp [ - {b_1}{\left\| {{{\mathit{\boldsymbol{r}}}_j} - {{\mathit{\boldsymbol{r}}}_i}} \right\|^2}]{\rm{ }}{a_1} < 0, {b_1} > 0$$ (8) 2) 兴奋性网格细胞至抑制性网格细胞:
$${w_{j \to i}} = {a_2}\exp [ - {b_2}{\left\| {{{\mathit{\boldsymbol{r}}}_j} - {{\mathit{\boldsymbol{r}}}_i}} \right\|^2}]{\rm{ }}{a_2} > 0, {b_2} > 0$$ (9) 3) 抑制性网格细胞至兴奋性网格细胞:
$$\begin{gathered} {w_{j \to i}} = {a_3}\exp [ - {b_3}{\left\| {{{\mathit{\boldsymbol{r}}}_j} - {{\mathit{\boldsymbol{r}}}_i}} \right\|^2}] - {a_4}\exp [ - {b_4}{\left\| {{{\mathit{\boldsymbol{r}}}_j} - {{\mathit{\boldsymbol{r}}}_i}} \right\|^2}] \\ {a_3} > {a_4}, {b_3} > {b_4} \\ \end{gathered} $$ (10) 松约束条件下,存在${w_{j \to i}} > 0$的抑制性网格细胞至兴奋性网格细胞突触联接权重,因此可能使得式(1)中${w_{{\rm{IE}}}}{R_{\rm{I}}} > 0$,从而使得部分网格细胞的放电率无限增加。为了限制网格细胞放电率的增加,同时使得网格细胞放电率呈等边六边形分布,需要对式(1)引入非线性项。本文对网格细胞放电率的非线性限制主要分为两个阶段:
1) 在网格细胞放电率由初始随机扰动至形成稳定的分布图案阶段,当任意一个网格细胞放电率超过放电率阈值${R_N}$时,该网格细胞放电率保持不变,不进行反应-扩散;
2) 初次形成的稳定放电率分布并不满足等边六边形分布,此时需要第二个阶段的放电率非线性限制。当兴奋性网格细胞放电率超过阈值${R_N}$时,设置该网格细胞放电率为${R_N}$,然后进行反应-扩散,抑制性网格细胞放电率不进行非线性限制。
-
网格细胞群产生稳定的等边六边形放电率分布,这是一个静止的分布,是网格细胞群的整体行为,各个网格细胞的放电率不再发生明显变化。网格细胞等边六边形放电野的产生是由于细胞放电率受自运动信息的影响而发生变化,根据式(1),这需要两个条件:1)具有能够响应自运动信息的网格细胞;2)具有非对称的网格细胞群突触连接权重。
根据对头朝向的不同响应,二维空间中的兴奋性网格细胞可分为4种:$R_{\rm{E}}^{\rm{N}}$、$R_{\rm{E}}^{\rm{S}}$、$R_{\rm{E}}^{\rm{W}}$、$R_{\rm{E}}^{\rm{E}}$,其放电率对自运动信息的响应分别为:
$$\left\{ \begin{array}{l} R_{\rm{E}}^{\rm{N}} = R_{\rm{E}}^{\rm{0}}(1 + g({\mathit{\boldsymbol{v}}})[1, 0][{v_X}, {v_Y}]') \\ R_{\rm{E}}^{\rm{S}} = R_{\rm{E}}^{\rm{0}}(1 + g({\mathit{\boldsymbol{v}}})[ - 1, 0][{v_X}, {v_Y}]') \\ R_{\rm{E}}^{\rm{W}} = R_{\rm{E}}^{\rm{0}}(1 + g({\mathit{\boldsymbol{v}}})[0, - 1][{v_X}, {v_Y}]') \\ R_{\rm{E}}^{\rm{E}} = R_{\rm{E}}^{\rm{0}}(1 + g({\mathit{\boldsymbol{v}}})[0, 1][{v_X}, {v_Y}]') \\ \end{array} \right.$$ (11) 式中,$R_{\rm{E}}^{\rm{0}}$为兴奋性网格细胞未对自运动信息产生响应时的输出;$g({\mathit{\boldsymbol{v}}})$为兴奋性网格细胞对自运动信息的响应系数;$[{v_X}, {v_Y}]$为动物在二维空间中的运动速度矢量。兴奋性网格细胞对自运动信息的响应体现在兴奋性网格细胞至抑制性网格细胞的放电率输出上,兴奋性网格细胞的反应-扩散过程不受自运动信息的影响。
非对称突触联接通常出现在对自运动信息具有不同响应的网格细胞群之间,也即式(1)中的${w_{{\rm{EI}}}}$和${w_{{\rm{IE}}}}$。本文选取${w_{{\rm{IE}}}}$作为非对称突触联接权重,抑制性网格细胞至4种兴奋性网格的突触联接权重为:
$$\begin{gathered} {w_{j \to i}} = {a_3}\exp [ - {b_3}{\left\| {{{\mathit{\boldsymbol{r}}}_j} - {{\mathit{\boldsymbol{r}}}_i} - l{{{\mathit{\boldsymbol{\hat e}}}}_i}} \right\|^2}] - \\ {a_4}\exp [ - {b_4}{\left\| {{{\mathit{\boldsymbol{r}}}_j} - {{\mathit{\boldsymbol{r}}}_i} - l{{{\mathit{\boldsymbol{\hat e}}}}_i}} \right\|^2}] \\ {a_3} > {a_4}, {b_3} > {b_4} \\ \end{gathered} $$ (12) 式中,$l$为非对称系数;${{\mathit{\boldsymbol{\hat e}}}_i}$为兴奋性网格细胞偏好朝向。$l$的取值需保证抑制性网格细胞群至位于同一位置${{\mathit{\boldsymbol{r}}}_i}$处的4种兴奋性网格细胞的突触联接权重之和仍然具有松约束条件式(10)的形式。
-
在二维空间$[x, y]$中,假设兴奋性网格细胞和抑制性网格细胞各取$40 \times 40 = 1{\rm{ }}600$个。抑制性网格细胞不对自运动信息产生响应,因此1 600个抑制性网格细胞没有偏好朝向。兴奋性网格细胞群包含4种具有偏好朝向的细胞,每种偏好朝向的细胞各有$20 \times 20 = 400$个,其分布位置为:
$$\left\{ \begin{gathered} {E^{\rm{S}}}~~~~{\rm{ }}2\bmod (x, 2) + \bmod (y, 2) = 3 \\ {E^{\rm{W}}}~~~{\rm{ }}2\bmod (x, 2) + \bmod (y, 2) = 2 \\ {E^{\rm{E}}}~~~{\rm{ }}2\bmod (x, 2) + \bmod (y, 2) = 1 \\ {E^{\rm{N}}}~~~{\rm{ }}2\bmod (x, 2) + \bmod (y, 2) = 0 \\ \end{gathered} \right.$$ (13) 本文仿真参数如表 1所示。
表 1 网格细胞放电率特性仿真参数
参数 值 300 $\partial t$ 0.001 ${B_{\rm{I}}}$ 1 ${B_{\rm{E}}}$ 1 ${S_{\rm{I}}}$ 1 ${S_{\rm{E}}}$ 2 ${a_1}$ -0.026 5 ${b_1}$ 1/24 ${a_2}$ 0.159 2 ${b_2}$ 1/4 $g$ 1.25 ${a_3}$ 0.318 3 ${b_3}$ 1/4 ${a_4}$ 0.079 6 ${b_4}$ 1/20 $l$ 1 ${R_N}$ 10 -
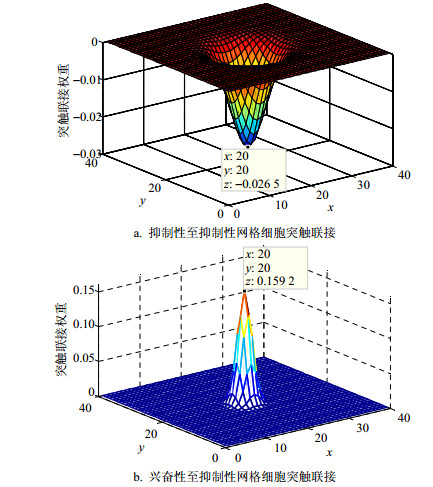
网格细胞群之间有3种突触联接方式,抑制性网格细胞群至抑制性网格细胞群、兴奋性网格细胞群至抑制性网格细胞群为对称突触联接,在满足松约束条件的情况下,输入细胞群至输出细胞群的第[20,20]网格细胞的突触联接如图 1所示。

图 1 网格细胞对称突触联接
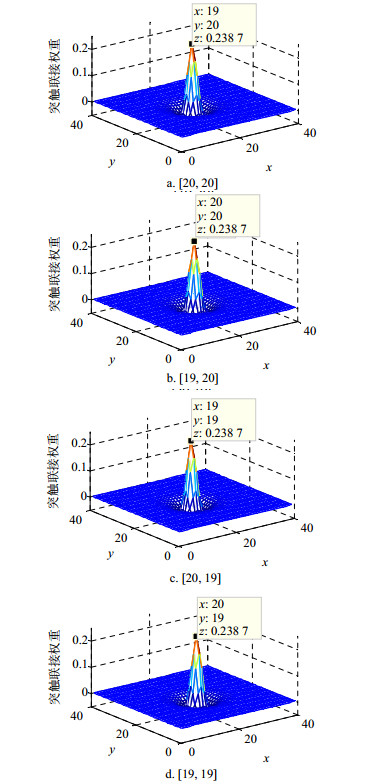
抑制性网格细胞群至兴奋性网格细胞群为非对称突触联接,输入细胞群至输出细胞群的第[20,20]、[20,19]、[19,20]、[19,19]网格细胞的突触联接如图 2所示。

图 2 网格细胞非对称突触联接
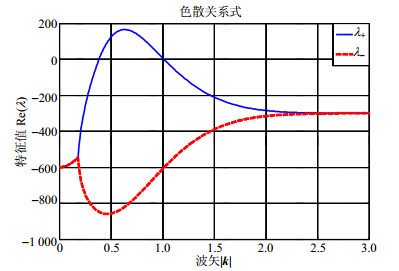
采用上述突触联接方式,色散关系式(5)可表示为图 3。由图可以看出,色散关系式满足网格细胞群产生稳定的等边六边形放电率分布所需的条件1)。图中使得特征值$\operatorname{Re} ({\lambda _ + })$取最大的波矢$\left| k \right|$与网格细胞放电野间距$d$的关系为。

图 3 网格细胞放电率色散关系
-
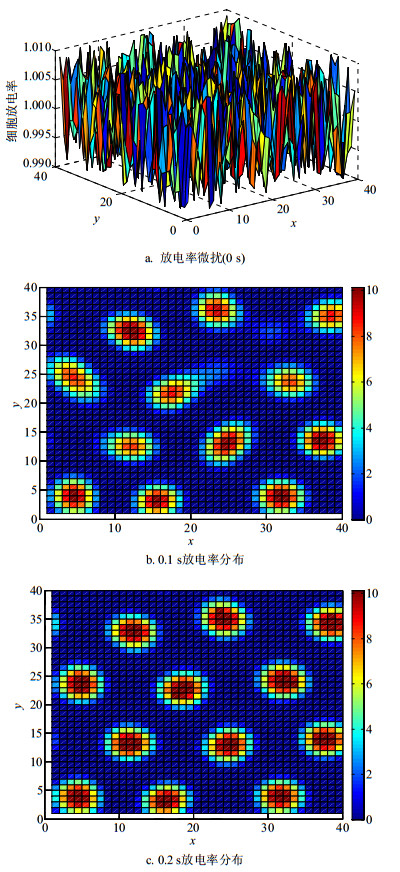
在满足条件1)的情况下,要生成稳定的等边六边形放电率分布,需要对放电率进行非线性限制,分别对非线性限制的两个阶段进行仿真。在本文所选细胞群突触权重情况下,各网格细胞具有相同的线性稳定放电率${R_0} = 1$,对各网格细胞放电率进行$[ - 0.01, 0.01]$的随机微扰,在第一个阶段的非线性限制下生成稳定的、近似等边六边形的放电率分布。抑制性网格细胞群放电率分布生成过程如图 4所示。

图 4 近似等边六边形放电率分布生成过程
改变非线性限制方式,对第一阶段生成的放电率分布进行调整,生成稳定的、等边六边形的放电率分布,如图 5所示。

图 5 等边六边形放电率分布
-
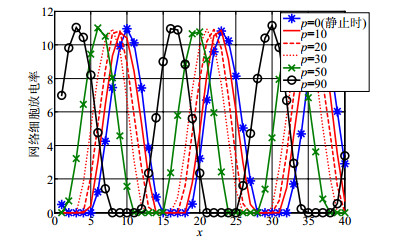
等边六边形放电野的生成需要具有能够响应自运动信息的网格细胞和非对称的网格细胞群突触连接权重,在抑制性网格细胞群至兴奋性网格细胞群的非对称系数$l = 1$的条件下对网格细胞响应自运动信息的能力进行仿真。假设大鼠运动方向为[-1, 0],运动使得兴奋性网格细胞的输出相对于静止时的输出增加p%,设置不同的p值,比较40([x=1:40, y=12])个抑制性网格细胞放电率的变化情况,如图 6所示。

图 6 网格细胞对自运动信息响应
由图 6可以看出,网格细胞群放电率分布随着大鼠运动而发生移动,且放电率分布移动速度对大鼠运动速度呈线性响应。
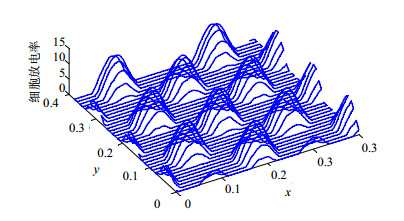
在正方形区域内对网格细胞放电野的分布情况进行仿真。假设正方形区域为0.4 m×0.4 m,顶点坐标分别为[0, 0]、[0, 0.4]、[0.4, 0]、[0.4, 0.4],每个网格细胞群的细胞均匀分布,细胞间隔为0.01 m,选取响应系数$g({\mathit{\boldsymbol{v}}}) = 1.25$。大鼠由[0, 0]点开始以速度0.2 m/s沿x轴往返运动,相邻两条沿x轴的运动轨迹间隔0.01 m,运动时间80 s。抑制性网格细胞[20,20]放电率随运动轨迹的变化如图 7所示。

图 7 网格细胞等边六边形放电野
由上图可以看出,网格细胞放电率随着运动轨迹的变化而表现出等边六边形的放电野。
-
连续吸引子网络模型是模拟网格细胞放电特性的重要模型之一,主要对网格细胞进行放电率编码。本文利用反应-扩散机制,对连续吸引子网络模型中网格细胞群的突触联接方式进行了研究分析,得到了松约束条件下网格细胞群等边六边形放电率分布以及网格细胞放电野形成条件;然后对基于放电率编码的网格细胞放电野形成条件和形成过程进行了仿真分析,验证了本文方法模拟网格细胞放电率特性的有效性。
本文主要对网格细胞自主导航时的放电率特性进行了模拟,下一步将利用该网格细胞放电模型构建类脑导航模型,设计具有环境感知和空间导航能力的智能自主运行体。
The Model of Grid Cell Firing Under Autonomous Navigation Condition
-
摘要: 网格细胞是动物大脑导航环路中一种重要的神经元细胞,它既可以自主完成路径整合功能,又可以与其他大脑区域共同完成复杂环境的空间导航。该文利用反应-扩散机制,对自主导航时网格细胞放电野的形成进行吸引子网络建模,分别得到网格细胞群间的突触联接关系、网格细胞放电率的非线性限制以及兴奋性网格细胞对自运动信息的响应方式。仿真结果表明,该模型可以有效模拟网格细胞群等边六边形放电率分布的形成过程,以及网格细胞根据自运动信息产生等边六边形放电野的过程,为类脑导航系统的构建提供了借鉴。Abstract: Grid cell is an important neuron cell in the navigation loop of animal brain. It can complete the function of path integration autonomously, and can complete complex environment space navigation with other brain regions. In this paper, the reaction-diffusion mechanism is used to model the formation of grid-cell firing field in autonomous navigation. The synaptic connections between the grid-cell groups, the nonlinear restriction of the grid-cells firing rate, and the response of the excitatory grid-cells to the ego-emotion information are obtained respectively. The simulation results show that the proposed model can effectively simulate the formation process of grid-like firing rate distribution in the grid-cell groups, and the formation process of hexagon firing field of individual grid-cells based on the ego-motion information. The proposed model can provide a reference for the construction of brain-inspired navigation system.
-
Key words:
- autonomous navigation /
- firing field /
- grid cell /
- reaction-diffusion mechanism
-
表 1 网格细胞放电率特性仿真参数
参数 值 300 $\partial t$ 0.001 ${B_{\rm{I}}}$ 1 ${B_{\rm{E}}}$ 1 ${S_{\rm{I}}}$ 1 ${S_{\rm{E}}}$ 2 ${a_1}$ -0.026 5 ${b_1}$ 1/24 ${a_2}$ 0.159 2 ${b_2}$ 1/4 $g$ 1.25 ${a_3}$ 0.318 3 ${b_3}$ 1/4 ${a_4}$ 0.079 6 ${b_4}$ 1/20 $l$ 1 ${R_N}$ 10  下载: 导出CSV
下载: 导出CSV
-
[1] HAFTING T, FYHN M, MOLDEN S, et al. Microstructure of a spatial map in the entorhinal cortex[J]. Nature, 2005, 436(7052):801-806. doi: 10.1038/nature03721 [2] MUESSIG L, HAUSER J, WILLS T J, et al. A developmental switch in place cell accuracy coincides with grid cell maturation[J]. Neuron, 2015, 86(5):1167-1173. doi: 10.1016/j.neuron.2015.05.011 [3] KEINATH A T, ZHANG L I. The preferred directions of conjunctive grid x head direction cells in the medial entorhinal cortex are periodically organized[J]. Plos One, 2016, 11(3):e0152041. doi: 10.1371/journal.pone.0152041 [4] 王琳, 王亮.认知地图的神经环路基础[J].生物化学与生物物理进展, 2017, 44(3):187-197. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=swhx201703002 WANG Lin, WANG Liang. Neural circuit basis of cognitive map[J]. Progress in Biochemistry and Biophysics, 2017, 44(3):187-197. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=swhx201703002 [5] YUAN M L, TIAN B, SHIM V A, et al. An entorhinal-hippocampal model for simultaneous cognitive map building[C]//Proceedings of the 29th AAAI Conference on Artificial Intelligence.[S.l.]: ACM, 2015: 586-592. [6] MICHAEL M, ADAM J, CHEN Z T, et al. RatSLAM: Using models of rodent hippocampus for robot navigation and beyond[C]//The 16th International Symposium ISRR. Singapore: Springer, 2016: 467-485. [7] FELIPE A G, LUAN S, MARCOS A, et al. Underwater visual 3D SLAM using a bio-inspired system[C]//2013 Symposium on Computing and Automation for Offshore Shipbuilding. Brazil: IEEE, 2013: 87-92. [8] 于乃功, 苑云鹤, 李倜, 等.一种基于海马认知机理的仿生机器人认知地图构建方法[J].自动化学报, 2018, 44(1):52-73. Y http://d.old.wanfangdata.com.cn/Periodical/zdhxb201801006 Ü Nai-gong, YUAN Yun-he, LI Ti, et al. A cognitive map building algorithm based on cognitive mechanism of hippocampus[J]. Acta Automatica Sinica, 2018, 44(1):52-73. http://d.old.wanfangdata.com.cn/Periodical/zdhxb201801006 [9] SCHMIDT-HIEBER C, TOLEIKYTE G, AITCHISON L, et al. Active dendritic integration as a mechanism for robust and precise grid cell firing[J]. Nature Neuroscience, 2017, 20(8):1114-1121. doi: 10.1038/nn.4582 [10] BURGESS N, BARRY C, O'KEEFE J. An oscillatory interference model of grid cell firing[J]. Hippocampus, 2007, 17(9):801-812. doi: 10.1002/hipo.20327 [11] D'ALBIS T, KEMPTER R. A single-cell spiking model for the origin of grid-cell patterns[J]. PLoS Computational Biology, 2017, 13(10):e1005782. doi: 10.1371/journal.pcbi.1005782 [12] BUSH D, BURGESS N. A hybrid oscillatory interference/continuous attractor network model of grid cell firing[J]. Journal of Neuroscience, 2014, 34(14):5065-5079. doi: 10.1523/JNEUROSCI.4017-13.2014 [13] DONATO F, JACOBSEN R I, MOSER M B, et al. Stellate cells drive maturation of the entorhinal-hippocampal circuit[J]. Science, 2017, 355(6330):eaai8178. doi: 10.1126/science.aai8178 [14] KRAUS B J, BRANDON M P, CONNERNEY M A, et al. During running in place, grid cells integrate elapsed time and distance run[J]. Neuron, 2015, 88(3):578-589. doi: 10.1016/j.neuron.2015.09.031 [15] RENNOCOSTA C, ABL T. Place and grid cells in a loop:Implications for memory function and spatial coding[J]. Journal of Neuroscience, 2017, 37(34):8062-8076. doi: 10.1523/JNEUROSCI.3490-16.2017 [16] BUSH D, BARRY C, MANSON D, et al. Using grid cells for navigation[J]. Neuron, 2015, 87(3):507-520. doi: 10.1016/j.neuron.2015.07.006 [17] ANDREA B, CASWELL B, BENIGNO U, et al. Vector-based navigation using grid-like representations in artificial agents[J]. Nature, 2018, 557(7705):10.1038/s41586-018-0102-6. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=07ff0308f43601cb1a21d824dc537805 [18] MURRAY J D. Mathematical biology Ⅱ:Spatial models and biomedical application[M]. New York, USA:Springer, 2003. [19] COUEY J J, WITOELAR A, ZHANG S J, et al. Recurrent inhibitory circuitry as a mechanism for grid formation[J]. Nature Neuroscience, 2013, 16(3):318-324. doi: 10.1038/nn.3310 -

 点击查看大图
点击查看大图
图(7) / 表(1)
计量
- 文章访问数: 4233
- HTML全文浏览量: 1302
- PDF下载量: 110
- 被引次数: 0
