 ISSN
ISSN 





-
受现代“隐身”技术发展的影响,采用雷达等电磁探测设备来定位和跟踪目标的方法已逐渐不能满足现代军事的需求。得益于热兵器时代的目标具有较高的红外辐射能量,红外小目标检测技术在许多领域得到重视,包括监控系统,预警系统和目标跟踪系统等。由于需要一定的预警能力,系统距离目标较远,目标的红外辐射能衰减较大,在红外图像中,远处投射的小目标通常占据较少的像素(49个像素以下),呈点状,无纹理,暗淡且没有具体的形状[1-5]。此外,受视场中热源辐射可变性的影响,红外图像容易受到红外传感器噪声的污染[6],同时云边,天海线及天气等干扰使图像质量较差,目标通常被淹没在低信噪比的杂波中[7-8]。这些都增加了红外小目标的检测难度,使得传统的目标检测方法无法很好地使用在小目标检测上,也使得其更具有研究价值[9]。
在过去的十几年里,研究者们提出了各种红外小目标检测算法[10-11]。可以大致分为两类:基于单帧检测[12-13]和基于多帧检测[14-16]。基于多帧的检测算法利用空间和时间信息检测目标,把目标的运动信息作为特征描述符,通常需要计算视场内所有像素在连续帧的运动轨迹,计算量较大,不适合在高速运动检测平台上使用[17]。因此,许多研究者更加关注单帧检测,在多帧检测前通过单帧检测对图像预处理,或者直接采用单帧检测目标。
基于单帧检测的算法通常分析目标与背景的某种特性差异来检测目标。如传统方法的最大均值和最大中值滤波算法[18]使用领域预测当前像素。基于轮廓结构形态学的Top-Hat方法[19]可以有效检测简单背景下的红外小目标,文献[20]对文献[19]方法做了改进,考虑了像素与领域的差异信息,增强了算法鲁棒性。传统的方法使用目标像素比背景更强的特性,但是针对暗目标和复杂多杂波的场景,传统方法的性能会迅速下降。人类视觉系统(human visual system, HVS)方法通常假设背景在大范围的纹理上存在自相关性,而小目标在图像中一般被认为是具有较高对比度的显着点。文献[21]采用领域对比度来量化显著性,然后通过阈值操作将小目标和背景区分开,在同质背景下,这种方法有较好的效果。文献[22]提出的多尺度灰度差分加权图像熵。文献[23]提出的加权局部差分测量,通过分析领域对比度和复杂度来检测目标,使用熵的复杂度检测目标,进一步增强了系统的性能。然而在杂乱的尖锐边缘和拐角处,可能也存在较高的显著点。基于分类的方法关注小目标特征,然后由训练的分类器区分目标,如人工神经网络[24]、支持向量机[25]。文献[26]提出一种基于差分,聚类和高斯曲率的检测方法,在分析图像中具有差异的部分后通过聚类确定像素是否属于有效的非均匀区域,再利用高斯曲率提取目标。基于分类方法的性能在很大程度上取决于训练样本和目标特征的选择。在实际情况中,红外小目标所处的背景大多十分复杂,而且变化较多,难以在有限的样本中包括大部分的杂波类型。因此当环境变化较大时,检测性能可能严重降低。总之,限制现有检测方法性能的原因在很大程度上是由于小目标在图像中的信息不足导致的区分能力有限。
小目标检测本质上是一个两类分类问题,每个像素被分类为目标或者杂波背景。通过不同方法计算的测量值实质上是对目标和杂波不同特征的不同量化,而检测中使用的特征决定了该方法的能力和缺陷[27]。在研究红外点状目标特征的启发下,小目标最重要的特征是其在图像中呈现高斯光团的形式,人眼对于小目标的识别表现为有相对明亮的中心区域和昏暗的环绕区域[28]。本文提出了一种多尺度局部梯度强度测算的小目标检测算法。首先构造多尺度图像金字塔,并在多尺度下提出一种快速粗略的小目标检测方法,然后利用目标本身与背景的差异性,度量局部窗口内各个方向的灰度变化强度。然后根据这些度量结果获得最合适的响应。实验结果表明,该方法可以提供高效率,高精度的目标定位。其鲁棒性也通过具有不同条件的测试集来验证。本文的贡献总结如下:
1) 提出构建多尺度图像金字塔来适应不同尺寸的小目标,提高不同情况下的识别性能。
2) 根据人眼观察小目标的方式,提出局部梯度变化响应的测算方法,将检测问题转换为二类分类问题。
-
预处理是很多视觉任务的第一步,特别是实时运行的目标定位跟踪系统。同时,质量较差的红外图像中,通常会含有椒盐噪声和高斯噪声。因此,本文提出基于领域区域平均的快速粗检测方法。
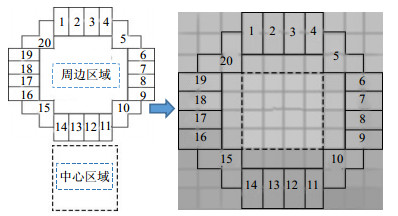
设计如图 1所示的滑动窗口W,包含中心区域(图中虚线框),周边区域(图中实线框)两个部分。中心区域被认为是目标,周边区域被认为是与目标有梯度变化的背景。将周边区域分为20份。分别计算中心区域的均值${M_{\rm{c}}}$与周边区域每部分的均值${M_i}$的差值${D_i}$。如图右所示,中心区域包含16个像素,周边区域包含2个或者3个像素。则${D_i}$表示为:
$$ \begin{gathered} {D_i} = \frac{{\sum {{I_{{\rm{center}}}}} }}{{16}} - \frac{{\sum {{I_i}} }}{{{N_i}}}{\rm{ = }}{M_{\rm{c}}} - {M_i}, {\rm{ }}i \in \{ 1, 2, \cdots , 20\} \\ {N_i} = \left\{ \begin{gathered} 2\;\;\;i = 5, 10, 15, 20 \\ 3\;\;\;i \ne 5, 10, 15, 20 \\ \end{gathered} \right. \\ \end{gathered} $$ (1) 
图 1 滑动窗口W
式中,${N_i}$为周边区域每部分像素的个数。对于每个像素I,可以通过分析${D_i}$对像素做出分类。
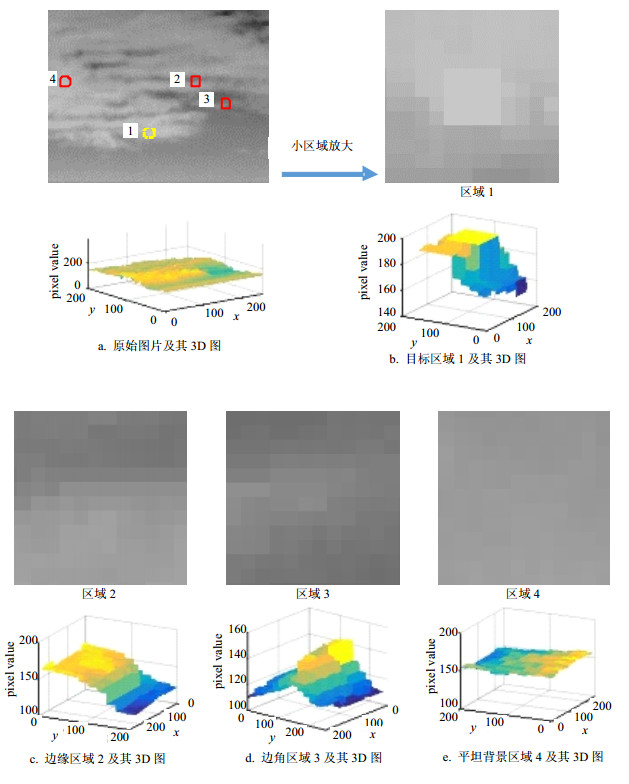
从原图中分别选取了4个区域,如图 2所示。区域1包含目标部分,区域2包含边缘部分,区域3包含边角部分,区域4包含平坦的背景部分。可以直观的看出目标区域1呈现“凸”状,即中心像素都高于周围像素。而非目标区域2,3,4的中心像素并不都高于周围像素。当目标为暗目标时,目标区域的中心像素应都低于周围像素。由于红外小目标在图像中通常看起来是一个点,占据几个像素,因此可以认为目标像素应都高于或低于目标周围的像素。则每个像素I可以通过判断Di中连续大于或小于0的数目N来判断,这里分为3类:
$$ I \Leftarrow \left\{ {\begin{array}{*{20}{l}} {t = 10}&{14 \le N \le 20\;\;\;\;\;\;\left( 目标 \right)}\\ {p = 5}&{9 \le N < 15\;\;\;\;\left( 虚假目标 \right)}\\ {n = 0}&{\;0 \le N < 9\;\;\;\;\;\;\left( 非目标 \right)} \end{array}} \right. $$ (2) 
图 2 快速粗检测方法中不同区域像素分布分析图解
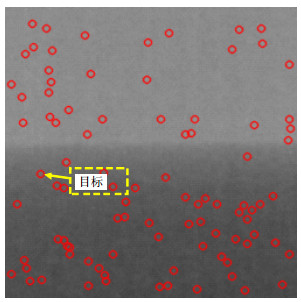
当N > 14时,表示周边区域有3/4的部分连续高于或低于中心区域,如图 2的区域1,则认为是目标,响应值为10。当N > 9时,表示有1/2的部分高于或低于中心区域,如图 2的区域2,仍有可能是目标,响应值为5。当N < 9,如区域3和区域4则不认为是目标,响应值为0。原图的检测结果如图 3所示,在图像中检测出多个目标,后续便只在这些位置处理。
图 3 快速检测结果示意图
-
如1.1节所述,这种快速的粗检测方法可以稳健的检测到红外小目标,但是无法区分红外小目标与多纹理杂波区域,如云层的边缘等。本文提出基于协方差矩阵的局部梯度强度测算方法。采用一个滑动的窗口度量当前像素单元与相邻像素单元之间的差异,充分利用像素的空间结构信息。采用滑动窗口在图 2中的4个区域移动时会产生如下3种情况:
1) 在目标区域1时,窗口在各个方向的移动都会有较大的变化,且其变化的方向都是相同的。
2) 在边缘区域2和尖角区域3时,窗口只在一个方向上移动时会有较大变化,且变化的方向相同。
3) 在平坦区域4时,窗口在各个方向的移动变化都很微小。
设一个像素的位置由向量${\mathit{\pmb{L}}}{\rm{ = }}{[x, y]^{\rm{T}}}$表示,窗口内像素集合为${w_l}({{\mathit{\pmb{L}}}_i}) = \{ {{\mathit{\pmb{L}}}_1}, {{\mathit{\pmb{L}}}_2}, \cdots , {{\mathit{\pmb{L}}}_i}, {{\mathit{\pmb{L}}}_{i + 1}}, \cdots , {{\mathit{\pmb{L}}}_m}\} $,其中,${{\mathit{\pmb{L}}}_i}$为中心像素,m为窗口的像素个数。窗口在图像某像素$p(x, y)$的领域内移动时产生的像素灰度变化程度$S({{\mathit{\pmb{L}}}_i})$可以通过建立以下模型来描述:
$$ S({{\mathit{\pmb{L}}}_i}) = \sum\limits_{(x + u, y + v) \in {w_l}} {{w_v}(m) \oplus {{(p(x + u, y + v) - p(x, y))}^2}} $$ (3) 式中,${w_v}(m)$是窗口函数,由于小目标在图像中通常以高斯光团的形式呈现,因此${w_v}(m)$服从高斯分布。
对上述公式进行泰勒一阶展开:
$$ S({{\mathit{\pmb{L}}}_i}) \approx [u, v]{\mathit{\pmb{C}}}\left[ {\begin{array}{*{20}{c}} u \\ v \end{array}} \right] $$ (4) 式中,C可以看成随机变量均值为0的协方差矩阵:
$$ {\mathit{\pmb{C}}} = \left[ {\begin{array}{*{20}{c}} {\sum {{p_x}{{({{\mathit{\pmb{L}}}_j})}^2}} }&{\sum {{p_x}({{\mathit{\pmb{L}}}_j}){p_y}({{\mathit{\pmb{L}}}_j})} } \\ {\sum {{p_x}({{\mathit{\pmb{L}}}_j}){p_y}({{\mathit{\pmb{L}}}_j})} }&{\sum {{p_y}{{({{\mathit{\pmb{L}}}_j})}^2}} } \end{array}} \right] $$ ${p_x}( \cdot )$和${p_y}( \cdot )$分别是窗口内像素在x方向和在y方向基于${w_v}(m)$的梯度值。那么$S({{\mathit{\pmb{L}}}_i})$便可以近似为一个二次项函数:
$$ S({{\mathit{\pmb{L}}}_i}) \approx D{u^2} + 2Euv + F{v^2} $$ (5) 式中,
$$ D = \sum {{p_x}{{({{\mathit{\pmb{L}}}_j})}^2}} ;E = \sum {{p_x}({{\mathit{\pmb{L}}}_j}){p_y}({{\mathit{\pmb{L}}}_j})} ;F = \sum {{p_y}{{({{\mathit{\pmb{L}}}_j})}^2}} $$ 因此,窗口内的像素在x方向和y方向上的梯度分布可以通过椭圆来表示。椭圆的扁率和尺寸由协方差矩阵C的特征值λ=[λ1, λ2]决定,方向则由特征向量决定。本文通过对协方差矩阵C进行特征值分解,得出矩阵的特征向量和特征值,进而分析图像区域中,哪个方向上的梯度的影响最大,即特征向量的哪个元素对应的特征值最大。如果两主分量的特征值都比较大,则说明图像梯度变化比较大,比较分散,如图 4中的目标区域1;如果两个特征值都比较小,则表明梯度幅度非常小,如图 4中平坦区域4。如果两个特征一个大一个小,则表明图像区域只在一个方向上存在梯度,如图 4中的边缘区域2和边角区域3。因此,可以抛开S(x, y)函数, 只分析协方差矩阵C来研究像素是否响应为目标。

图 4 3个背景下4个不同区域的梯度方向分析的图解。其中4个区域分别为目标区域1,边缘区域2,边角区域3和平坦区域4
协方差矩阵C由以Li=[x, y]T为中心的窗口的空间梯度向量的集合估算出来,可以直接通过空间梯度向量G与其转置相乘估算出来,即:
$$ \mathit{\pmb{C}}={{\mathit{\pmb{G}}}^{^{\rm{T}}}}{\mathit{\pmb{G}}} $$ (6) 式中,G表示为:
$$ \mathit{\pmb{G}} = \left[ {\begin{array}{*{20}{c}} {{p_{\mathit{\pmb{x}}}}({{\mathit{\pmb{L}}}_1})}&{{p_{\mathit{\pmb{y}}}}({{\mathit{\pmb{L}}}_1})} \\ \vdots & \vdots \\ {{p_{\mathit{\pmb{x}}}}({{\mathit{\pmb{L}}}_i})}&{{p_{\mathit{\pmb{y}}}}({{\mathit{\pmb{L}}}_i})} \\ \vdots & \vdots \\ {{p_{\mathit{\pmb{x}}}}({{\mathit{\pmb{L}}}_m})}&{{p_{\mathit{\pmb{y}}}}({{\mathit{\pmb{L}}}_m})} \end{array}} \right] $$ 进一步,在计算出协方差矩阵之后,为了更方便地度量区域内的梯度变化量。定义度量值计算函数:
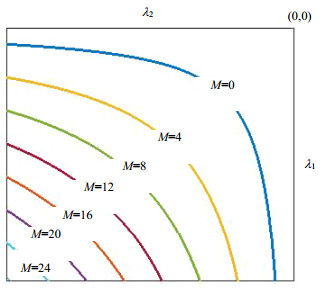
$$ M = \det {\mathit{\pmb{C}}} - \mu {({\rm{trace}}{\mathit{\pmb{C}}})^2} = {\lambda _1}{\lambda _2} - \mu {({\lambda _1} + {\lambda _2})^2} $$ (7) 式中,μ是调节因子,保持M≥0,令${\lambda _2}{\rm{ = }}\omega {\lambda _1}$,$0 \leqslant \omega \leqslant 1$,式(7)变为:
$$ M = \omega \lambda _1^2 - \mu {(1 + \omega )^2}\lambda _1^2 \geqslant 0 $$ (8) 所以$\mu \leqslant \frac{\omega }{{{{(1{\rm{ + }}\omega )}^2}}} \leqslant 0.25$,采用经验值$\mu {\rm{ = 0}}{\rm{.06}}$。
如图 5所示,表示了不同M值下的度量函数曲线。可见M值越大,对应的λ1和λ2越大,且λ1和λ2越接近。因此,每个像素的度量值可以通过式(9)计算出来:
$$ {\rm{grade = }}I + M $$ (9) 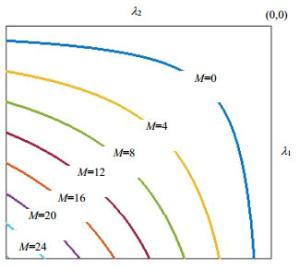
图 5 度量函数M的曲线
这意味着图像中某个像素的grade值越大,是目标的可能性越大。
-
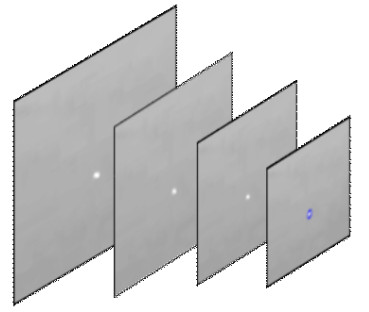
如上述1.1节和1.2节提出的算法中,检测过程中所使用的窗口尺寸是固定的。但是,系统在未知场景中时,没有办法预知目标的尺寸,一般认为目标面积占不超过20%的图像总面积。采用过大或者过小的固定窗口都会降低系统的鲁棒性,因此算法需要考虑多尺度下的检测,使其独立于图像的分辨率。如图 6所示,当目标过大时,在原图上无法检测到目标,在对图像缩放之后才可以检测到目标。因此本文提出基于尺度变换的点目标检测优化算法。

图 6 多尺度检测算法的示例图
如图 6所示,在原图的基础上建立尺度图像序列。设尺度比例向量${\mathit{\pmb{\sigma}}}{\rm{ = [}}{\sigma _1}, {\sigma _2}, \cdots , {\sigma _j}{\rm{]}}$,且${\sigma _j}{\rm{ = }}\beta {\sigma _{j{\rm{ - }}1}}$,其中$\beta {\rm{ = }}1.2$为经验常数,$j$为尺度序列图像的层数。则第$i$层缩放图像的像素坐标向量${{\mathit{\pmb{L}}}_z}$处的像素需要对应的原图像的坐标为:
$$ \mathit{\pmb{L}} = {\sigma _i}{L_{\rm{z}}} $$ (10) 式中,L表示原图坐标向量。缩放图像在(x, y)处的像素为${p_z}(1/{\sigma _i}{L_{\rm{z}}})$,通过式(10)求出的坐标可能不是整数,对于以整数位索引值的图像来说,无法准确映射,因此,本文使用双线插值算法计算出对应的坐标向量。通过式(10)求出映射在原图中的坐标不是整数时,采用双线插值计算灰度值:
$$ {p_z}(x, y) = {\left[ {\begin{array}{*{20}{c}} {{x_2} - {x_1}} \\ {x - {x_1}} \end{array}} \right]^{\rm{T}}}\left[ {\begin{array}{*{20}{c}} {p({x_1}, {y_1})}&{p({x_1}, {y_2})} \\ {p({x_2}, {y_1})}&{p({x_2}, {y_2})} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {{y_2} - y} \\ {y - {y_1}} \end{array}} \right] $$ (11) 式中:
$$ \begin{gathered} ({x_1}, {y_1}) = (\left\lfloor x \right\rfloor , \left\lfloor y \right\rfloor ) \\ ({x_2}, {y_2}) = (\left\lceil x \right\rceil , \left\lceil y \right\rceil ) \\ \end{gathered} $$ 在多尺度空间上运行点目标检测算法,会增加误检测目标的数量,提高系统的误检测概率。因此,计算多尺度序列图像中每个尺度的grade值,通过式(12),选择大于阈值的grade值作为当前尺度的初始点。
$$ {\rm{Th}} = u + k\sigma $$ (12) 式中,u是置信图中所有感兴趣点响应度grade的平均值;σ是所有感兴趣点响应度grade的标准差。在实验中k是调节因子,在第2节中进行分析。
在这些初始点中,存在着两类点集。第一类是在多个尺度上相映射的位置上存在的点集,另一类是只在其中一个尺度上存在的点集。针对第一类点,保留其中最大的grade值。将剩余所有的目标点汇集在一起,通过式(12)选取grade大于阈值的即为最终目标点。
图 7为本文所提出的红外小目标检测算法的流程图。整体红外小目标检测可以分为两个主要步骤:红外目标增强和红外小目标分割。红外小目标增强用于突出感兴趣的目标并抑制背景杂波;红外小目标分割将准确地识别感兴趣的目标。图 7中第二张图像为输入图像,首先,基于原图像生成尺度比例向量σ的图像序列,在每个尺度上采用图 1所示的模板快速粗略的检测目标,并根据式(2)为每个检测到的点进行打分。在快速检测方法得到的位置中,进一步根据式(6),计算以(i, j)为中心点的领域内的图像梯度,并得到领域的协方差矩阵,根据式(8)计算每个目标的响应程度,根据式(9)计算总响应值。

图 7 本文提出的红外小目标检测方法流程图。红色圈表示目标,黄色虚线圈代表背景杂波。第1、3和5张图像分别显示了第2、4和6张图像的3D网格视图。第2、4、6幅图像分别显示原始图像、置信图和最终检测结果
根据式(12)选择大于阈值的点,叠加每层得到第4张置信度图,从第三张图中可以看出仍然有误报情况,图中用虚线标注出来。进一步的选择响应度大于阈值的目标点作为最终结果,如图 7第6张图。
算法1展示了第一节中提出的红外小目标检测算法的具体过程。
算法1 红外小目标检测方法
输入:原始红外图像
输出:最终检测结果
步骤:
1) 根据式(10)和式(11)建立尺度图像序列。
2) 通过式(1)在原始图像中进行快速检测,通过式(2)计算快速检测出的目标的响应值。
3) 通过式(7)计算步骤2)检测出的目标的局部梯度强度的响应值。通过式(9)计算总的grade值。
4) 根据式(12)计算出来的分割阈值,分割红外小目标和杂波。
-
本文所有的实验都是在3.3 GHz,Intel Core i5 CPU,8 GB内存的台式电脑上,基于C++的环境下实现的。构建了4种不同背景下的红外小目标数据集(海空,地面,海面,天空)。所有图像中的红外小目标已在像素集中手动标注。如表 1所示,展示了数据库的详细情况。本文将用此数据集评估红外小目标检测方法的性能。
表 1 测试数据集
参数 数据集1 数据集2 数据集3 数据集4 图片数量 14 15 2 33 背景类型 地面 海面 天海交接 天空 图像尺寸 250×250 250×250 250×250 250×250 目标类型 车辆 船 船 斑点 红外小目标检测常用定量评价指标工作特性(ROC)曲线,表示真阳性率(TPR)与假阳性率(FPR)之间的变化关系等[29-30],其中TPR表示检测出的目标数与真正的目标数量的比值,FPR表示检测出的假目标与图像总像素数的比值。因此,本文选择ROC曲线作为定量评价指标。
-
在本文实验中,保持经验参数固定,定量分析式(12)调节因子k和尺度层数j对红外小目标检测性能的影响。
-
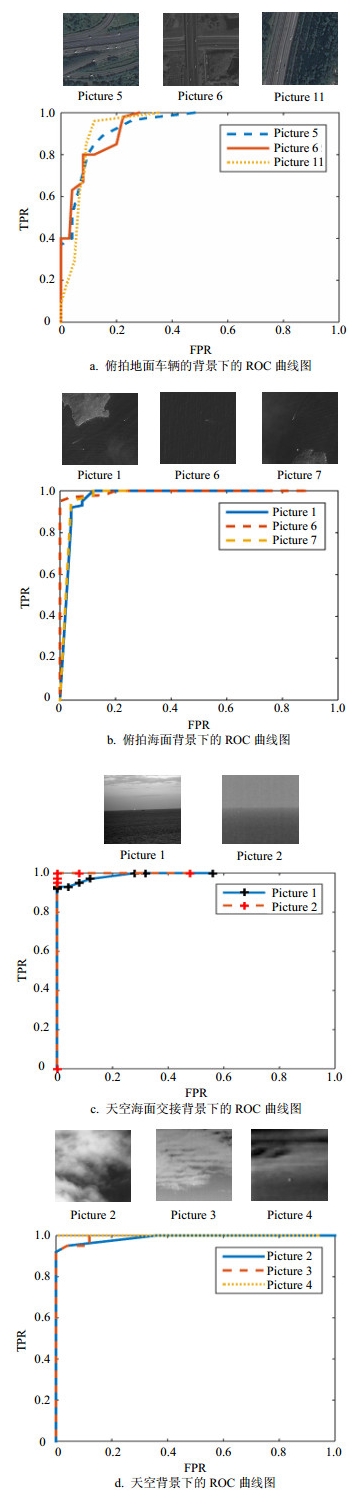
调节因子k的大小会影响式(12)分割阈值的大小。因此,为了保持k的独立性,在原图尺度下进行分析。如图 8所示,总结了不同的调节因子值$k = \{ 0.1, 0.3, 0.5, 0.7, 0.9, 1.1, 1.3, 1.5, 1.7\}$的4个不同背景图片的定量评价结果。如图 8a~图 8d分别取用表 1中4个数据集里具有代表性的图像进行处理。当1≤k≤1.4时,该部分算法到达最佳性能,因此,本文实验设置k为1.3。

图 8 4个不同背景在不同K值下的ROC曲线图
-
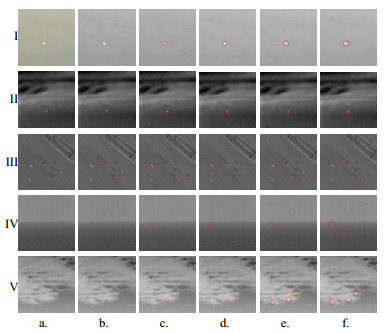
多尺度检测可以有效地提高系统的鲁棒性,如图 9所示,Ⅰ~Ⅴ分别是不同背景下的图,由图Ⅰ~Ⅲ可知在原图像中检测不到或只检测到一部分的像素,随着尺度序列图像的增加,能够较好地检测出目标,并能检测出完整的目标。但是随着尺度层数的增加,也会降低系统的性能,如图中Ⅳ、Ⅴ,当尺度的层数增加到4层时,在检测出目标的同时,也过多地放大了目标的轮廓,同时也将杂波误认为是目标。因此,在本文中,将尺度层数j设置为3。

图 9 不同背景下不同层数的尺度序列图的检测结果示意图
-
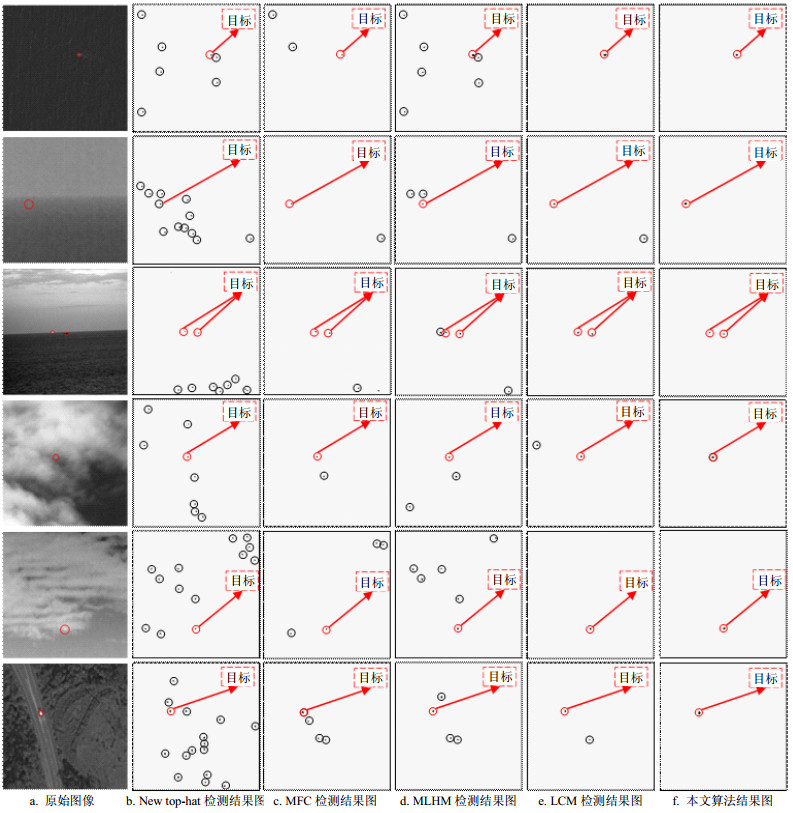
为了进一步显示多尺度局部梯度强度评估算法检测红外小目标检测有效性,使用若干代表性的红外小目标检测方法进行比较。5种方法的检测结果如图 10所示。从图中第3行和第4行可以看出,当背景比较简单,目标与背景对比度较大时,5种检测方法效果都较好,但是New top-hat算法,MFC算法,MLHM[31]检测结果图仍有不同程度的误检测。当背景比较复杂且目标与背景对比度较低时,New top-hat算法和MLHM算法性能会有明显的下降,如图中第1、2、5和6行。通过a, b, c, d, e列和f列比较可以看出,LCM算法和本文提出的算法的鲁棒性比较好。但是LCM算法仍会有误检的情况,如图中e列的第2行和第6行。可见本文的方法明显优于其他算法。

图 10 提出的红外小目标检测方法和其他现有方法检测结果的对比示意图。1~6行分别选用数据集中具有代表性的6张不同背景的图。红色圈包含感兴趣的红外小目标的位置,黑色圈包含误检测的杂波位置
另外,对所提出的方法与这4种方法进行定量的比较,在图 10中的第1, 2, 4, 6行背景图中分别添加均值为0,方差为0.001~0.007的高斯噪声。并根据检测结果绘制如图 11所示的ROC曲线图。从图中可以看出New top-hat算法[18]和MFC算法[23]在背景比较简单且目标比较突出时,如a和d,性能较好,当背景比较复杂,其目标对比度较低时,性能较差,MLHM算法[27]和LCN算法[19],性能较好。与其他现有方法相比,所提出的方法在多种背景下实现了最佳性能,这意味着所提出的方法具有更好的性能。其鲁棒性也比较强。

图 11 本文提出的检测方法与4个现有方法在不同背景下的ROC曲线
-
为了解决复杂背景下,质量较差的红外图像中小目标检测的问题,本文提出使用局部梯度强度对每个像素进行描述。考虑在一定窗口内,像素的梯度变化情况,本文使用的局部梯度协方差矩阵,反应了窗口内梯度方向和大小的相关性,同时,结合了算法第一步的粗提取部分,在大窗口内,建立小区域求均值,很大程度上抑制了椒盐噪声和高斯噪声对系统性能的影响。由此可见,粗提取和基于协方差矩阵的方法结合起来,可以同时增强感兴趣的红外小目标并抑制大部分背景杂波。实验结果表明该方法明显优于现有的几种经典的红外小目标检测算法。
在接下来的研究中,将在本文算法的基础上,进一步分析协方差矩阵在表示图像梯度相关性上的作用。同时,还将致力于将机器学习的思想引入到特征值分析上,解决红外小目标检测的问题。
Point Target Detection Technology Based on Multi-Scale Local Gradient
-
摘要: 在研究红外点状移动目标特征的基础上,该文提出一种多尺度局部梯度强度测算的小目标检测算法。首先构造多尺度图像金字塔,并在多尺度下提出一种快速粗略的小目标检测方法;再利用目标本身与环绕背景之间的差异性,测算局部窗口内各个方向的灰度变化强度。然后根据这些测算结果获得最合适的响应。实验结果表明,在复杂多变的背景下,该方法具有较好的鲁棒性,在低信噪比下,有较为有效的检测性能。Abstract: With the development of infrared monitoring and early warning system, more and more attention has been paid to the research of infrared small target detection technology. How to continuously and effectively detect the target position in a complex background has always been a major challenge for researchers. Based on the study of the characteristics of infrared point moving targets, this paper proposes a small target detection algorithm for multi-scale local gradient strength measurement. Firstly, a multi-scale image pyramid is constructed, and a fast and coarse small target detection method is proposed at multiple scales. Then, the difference between the target itself and the surrounding background is used to measure the intensity of grayscale changes in various directions in the local window. Then the most appropriate response based on these measurements is obtained. The experimental results show that the proposed method has better robustness under the background of complex and variable, and it has more effective detection performance under lower signal-to-noise ratio.
-
图 7 本文提出的红外小目标检测方法流程图。红色圈表示目标,黄色虚线圈代表背景杂波。第1、3和5张图像分别显示了第2、4和6张图像的3D网格视图。第2、4、6幅图像分别显示原始图像、置信图和最终检测结果
图 9 不同背景下不同层数的尺度序列图的检测结果示意图
Ⅰ, Ⅱ, Ⅲ, Ⅳ, Ⅴ分别是5张不同背景的图片不同层数尺度下的检测结果;a, b, c, d, e, f分别为不同背景下的原图和层数j为1, 2, 3, 4, 5时的检测结果图
图 10 提出的红外小目标检测方法和其他现有方法检测结果的对比示意图。1~6行分别选用数据集中具有代表性的6张不同背景的图。红色圈包含感兴趣的红外小目标的位置,黑色圈包含误检测的杂波位置
表 1 测试数据集
参数 数据集1 数据集2 数据集3 数据集4 图片数量 14 15 2 33 背景类型 地面 海面 天海交接 天空 图像尺寸 250×250 250×250 250×250 250×250 目标类型 车辆 船 船 斑点  下载: 导出CSV
下载: 导出CSV
-
[1] 闫钧华, 段贺, 艾淑芳, 等.旋转复杂背景中红外运动小目标实时检测[J].电子科技大学学报, 2017, 46(5):697-702. doi: 10.3969/j.issn.1001-0548.2017.05.010 YAN Jun-hua, DUAN He, AI Shu-fang, et al. Real-time detection for infrared motion small targets in rotation and complex background[J]. Journal of University of Electronic Science and Technology of China, 2017, 46(5):697-702. doi: 10.3969/j.issn.1001-0548.2017.05.010 [2] 傅志中, 王雪, 李晓峰, 等.基于视觉显著性和NSCT的红外与可见光图像融合[J].电子科技大学学报, 2017, 46(2):357-362. doi: 10.3969/j.issn.1001-0548.2017.02.007 FU Zhi-zhong, WANG Xue, LI Xiao-feng, et al. Infrared and visible image fusion based on visual saliency and NSCT[J]. Journal of University of Electronic Science and Technology of China, 2017, 46(2):357-362. doi: 10.3969/j.issn.1001-0548.2017.02.007 [3] 武文成, 艾斯卡尔·艾木都拉.基于时空的弱点状运动目标检测技术[J].激光与红外, 2019, 49(5):626-632. doi: 10.3969/j.issn.1001-5078.2019.05.020 WU Wen-cheng, Askar Hamdulla. The detection technology of the small moving object based on space-time[J]. Laser & Infrared, 2019, 49(5):626-632. doi: 10.3969/j.issn.1001-5078.2019.05.020 [4] GAO C, WANG L, XIAO Y, et al. Infrared small-dim target detection based on Markov random field guided noise modeling[J]. Pattern Recognition, 2018, 76:463-475. doi: 10.1016/j.patcog.2017.11.016 [5] HE Y J, LI M, ZHANG J L, et al. Small infrared target detection based on low-rank and sparse representation[J]. Infrared Physics & Technology, 2015, 68:98-109. http://d.old.wanfangdata.com.cn/Periodical/hzlgdxxb201710005 [6] LI Y, ZHANG Y. Robust infrared small target detection using local steering Kernel reconstruction[J]. Pattern Recognition, 2018, 77:113-125. doi: 10.1016/j.patcog.2017.12.012 [7] WEI Y T, YOU X G, LI H. Multiscale patch-based contrast measure for small infrared target detection[J]. Pattern Recognition, 2016, 58(C):216-226. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=227ea228d2e344110c9eb914d6661e2e [8] SHI S N, SHUI P L. Detection of low-velocity and floating small targets in sea clutter via income-reference particle filters[J]. Signal Processing, 2018, 148:78-90. doi: 10.1016/j.sigpro.2018.02.005 [9] HAN J, LIANG K, ZHOU B, et al. Infrared small target detection utilizing the multiscale relative local contrast measure[J]. IEEE Geoscience & Remote Sensing Letters, 2018, 15(4):612-616. http://cn.bing.com/academic/profile?id=d6e07ea7691c901ff5755dc71e5f7cc5&encoded=0&v=paper_preview&mkt=zh-cn [10] ZHANG H, ZHANG L, YUAN D, et al. Infrared small target detection based on local intensity and gradient properties[J]. Infrared Physics & Technology, 2018, 89:88-96. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=962fc1dfed2710139fbd5bb30796beb7 [11] LI Y, ZHANG Y. Robust infrared small target detection using local steering kernel reconstruction[J]. Pattern Recognition, 2018, 77:113-125. doi: 10.1016/j.patcog.2017.12.012 [12] QIN Y, LI B. Effective infrared small target detection utilizing a novel local contrast method[J]. IEEE Geoscience & Remote Sensing Letters, 2016, 13(12):1890-1894. http://cn.bing.com/academic/profile?id=23702085f4f8bb2ddc09c475c04c2f90&encoded=0&v=paper_preview&mkt=zh-cn [13] WANG X, CHEN C. Ship detection for complex background sar images based on a multiscale variance weighted image entropy method[J]. IEEE Geoscience & Remote Sensing Letters, 2017, 14(2):184-187. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=22484fbddadb7a7bb4bd5d0d3fc241e3 [14] QIAN K, ZHOU H, RONG S, et al. Infrared dim-small target tracking via singular value decomposition and improved Kernelized correlation filter[J]. Infrared Physics & Technology, 2017, 82:18-27. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=03accde4cb694712b587a70d1f126103 [15] SUN X, LIU X, TANG Z, et al. Real-time visual enhancement for infrared small dim targets in video[J]. Infrared Physics & Technology, 2017, 83:217-226. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=85993979705ab314cf887fcf95f6b48a [16] WAN M, GU G, CAO E, et al. In-frame and inter-frame information based infrared moving small target detection under complex cloud backgrounds[J]. Infrared Physics & Technology, 2016, 76:455-467. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=529eb85bb101ba88df652d75b0423f84 [17] NASIRI M, CHEHRESA S. Infrared small target enhancement based on variance difference[J]. Infrared Physics & Technology, 2017, 82:107-119. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=a9acaec7c93a9824a0ab20df8d840f8b [18] DESHPANDE S D, ER M H, VENKATESWARLU R, et al. Max-mean and max-median filters for detection of small targets[C]//Signal and Data Processing of Small Targets 1999. International Society for Optics and Photonics.[S.l.]: SPIE, 1999, 3809: 74-84. [19] BAI X, ZHOU F, XIE Y, et al. Modified top-hat transformation based on contour structuring element to detect infrared small target[C]//IEEE Conference on Industrial Electronics and Applications Iciea 2008.[S.l.]: IEEE, 2008: 575-579. [20] BAI X, ZHOU F. Analysis of new top-hat transformation and the application for infrared dim small target detection[J]. Pattern Recognition, 2010, 43(6):2145-2156. doi: 10.1016/j.patcog.2009.12.023 [21] CHEN C L P, LI H, WEI Y, et al. A local contrast method for small infrared target detection[J]. IEEE Transactions on Geoscience & Remote Sensing, 2013, 52(1):574-581. https://www.researchgate.net/publication/260623416_A_Local_Contrast_Method_for_Small_Infrared_Target_Detection [22] DENG H, SUN X, LIU M, et al. Infrared small-target detection using multiscale gray difference weighted image entropy[J]. IEEE Transactions on Aerospace & Electronic Systems, 2016, 52(1):60-72. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=f94890dfc12a9b17672bd8482cc57606 [23] DENG H, SUN X, LIU M, et al. Small infrared target detection based on weighted local difference measure[J]. IEEE Transactions on Geoscience & Remote Sensing, 2016, 54(7):4204-4214. http://cn.bing.com/academic/profile?id=3751112c07564c52b0d17c4e99d3e59b&encoded=0&v=paper_preview&mkt=zh-cn [24] SHIRVAIKAR M V, TRIVEDI M M. A neural network filter to detect small targets in high clutter backgrounds[J]. IEEE Transactions on Neural Networks, 2002, 6(1):252-257. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=5b8af4048c481128093a0d300c146902 [25] BI Y, BAI X, JIN T, et al. Multiple feature analysis for infrared small target detection[J]. IEEE Geoscience and Remote Sensing Letters, 2017, 14(8):1333-1337. doi: 10.1109/LGRS.2017.2711047 [26] ZHANG H, NIU Y, ZHANG H. Small target detection based on difference accumulation and Gaussian curvature under complex conditions[J]. Infrared Physics & Technology, 2017, 87:55-64. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=b02f875385504f58211b5fce71e78bd8 [27] YANG X, ZHOU Y, ZHOU D, et al. A new infrared small and dim target detection algorithm based on multidirectional composite window[J]. Infrared Physics & Technology, 2015, 71:402-407. http://cn.bing.com/academic/profile?id=7d6c4e1af41c17715c1300f57e9554e8&encoded=0&v=paper_preview&mkt=zh-cn [28] LIU D, CAO L, LI Z, et al. Infrared small target detection based on flux density and direction diversity in gradient vector field[J]. IEEE Journal of Selected Topics in Applied Earth Observations & Remote Sensing, 2018, 11(7):1-27. https://www.researchgate.net/publication/325183872_Infrared_Small_Target_Detection_Based_on_Flux_Density_and_Direction_Diversity_in_Gradient_Vector_Field [29] GAO C, MENG D, YANG Y, et al. Infrared patch-image model for small target detection in a single image[J]. IEEE Transactions on Image Processing, 2013, 22(12):4996-5009. doi: 10.1109/TIP.2013.2281420 [30] LI Y, ZHANG Y, YU J G, et al. A novel spatio-temporal saliency approach for robust dim moving target detection from airborne infrared image sequences[J]. Information Sciences, 2016, 369(C):548-563. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=7f15c406f17e93cb90368120b142d8e3 [31] NIE J, QU S, WEI Y, et al. An infrared small target detection method based on multiscale local homogeneity measure[J]. Infrared Physics & Technology, 2018, 90:186-194. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=7a59be487e40ddc6814002f8bc287ec9 -

 点击查看大图
点击查看大图
图(11) / 表(1)
计量
- 文章访问数: 4204
- HTML全文浏览量: 1396
- PDF下载量: 71
- 被引次数: 0
