 ISSN
ISSN 






-
广播式自动相关监视(ADS-B)是航空监视体系中对空管监视雷达的替代和扩展技术[1-3],是国际民航组织(International Civil Aviation Organization, ICAO)主推的新一代监视技术。星基ADS-B覆盖范围远、无视地形等障碍,可真正实现全球实时连续无缝覆盖。世界各航空大国均投入大量资源开展相关研究,美国、欧洲等已经成功发射搭载ADS-B系统的通信卫星。
星基ADS-B系统接收信号能量弱、信噪比低,目前没有一种专门适用于星基ADS-B信号的信号检测与译码方法,这是后续解交织[4]、解码[5-6]等信号处理的基础。最常用的方法是单脉冲检测技术[7-8],通过检测报文中每个码脉冲信号上升沿、下降沿、平坦度,再根据一定的门限准则判断该码脉冲是否有效。对于星基ADS-B信号,其主要特征是能量弱、信噪比低,适用于陆基ADS-B信号的检测技术对星基ADS-B信号并不适用。常规单脉冲检测译码技术效率低的原因之一是,该方法只利用了接收端信号而丢失了发射端ADS-B信号中的可用信息,如ADS-B报头具有稳定的结构,充分利用该信息可以提高报文的检测概率。反演技术正是基于这种思路的一种检测技术,在工业CT检测[9]、医学成像[10]、地质勘探[11]等领域均有大量成功应用案例。
本文针对低信噪比ADS-B信号译码误码率大的难题,提出了一种基于反演策略的星基ADS-B译码方法。该方法假设传输一帧ADS-B信号的空间在传输信号的时间段内是一个稳定的线性系统,接收端接收信号是发射端信号与该线性系统的卷积和。首先通过滑动窗检测方法完成低信噪比的ADS-B报头检测,利用检测到的报头数据与理论报头数据进行反演计算,估计空间系统参数;然后利用该帧ADS-B接收信号和空间系统参数进行反演计算,得到反演信号;最后将反演信号进行波形校正,实现了ADS-B信号译码。通过一组仿真实验展示了本文译码方法的完整操作流程,仿真实验与常规单脉冲检测方法对比,结果表明反演译码方法能够实现对ADS-B信号中每个码脉冲准确定位,译码正确率远高于常规单脉冲检测方法。
HTML
-
ADS-B信号有3种,分别是1090ES数据链、UAT数据链和VDL-4数据链,其中1090ES数据链是全球运输航空标准,我国运输航空和通用航空ADS-B系统均采用1090ES数据链。
1090ES模式ADS-B信号调制频率1 090 MHz,载波频率允许最大偏差1 MHz,帧长120 μs,其中,报头(前导信号)8 μs,数据域112 μs。一个完整的1090ES模式ADS-B信号基本结构如图1所示。报头信号由4个脉冲组成,脉冲前沿时刻分别为0、1、3.5和4.5 μs,每个脉冲持续时间为0.5 μs。数据从第8 μs开始,120 μs处结束,采用脉冲位置调制进行信息调制。每一个比特位的码元有两个码片,比特1的码元由一个前置脉冲和低电平码片组成,比特0由一个低电平和一个后置脉冲码片组成,每个码片持续时间为0.5 μs。数据域中第33~88比特为信息位,包含了ADS-B信息的主要信息,第89~112比特为CRC校验位。

-
根据某卫星系统运行轨道高度和星座布局,所需探测距离为3 000 km,信号在传输过程中存在路径损耗,根据式(1)估算最大损耗约为162.7 dB。
当前机载ADS-B信号的发射功率为250 W,该信号经过最大损耗后到达星载ADS-B系统的功率只有−109 dBm,有用信号受到噪声干扰严重。如何在低信噪比下完成对ADS-B信号脉冲码识别与准确译码是星基ADS-B技术发展的重要基础。
1.1. ADS-B信号格式
1.2. 星基ADS-B技术挑战
-
每一个1090ES模式ADS-B都有固定的信号报头格式,如4个相邻脉冲间隔分别为1、3.5和4.5 μs,则可以判断该信号为一个有效的ADS-B信号报头。根据ICAO规定,1090ES模式有效脉冲判决的依据是,脉内平坦度在1~2 dB以内。但是在低信噪比下,信号脉冲受到噪声干扰严重,低电平位置采样点与高电平采样点幅值相差不大。当参考电平选取不当时,1~2 dB的平坦度可能无法区分信号中的高低电平,但平坦度过小则会导致检测容错力低而丢失真实脉冲,因此,采用单脉冲检测技术可能无法检测出完整的报头。本文在单脉冲检测的基础上,利用ADS-B信号报头结构特征进行综合匹配判断,实现低信噪比中报头检测。
ADS-B报头检测包括单脉冲检测和报头结构滑动匹配判断两个部分。在单脉冲检测中,假设ADS-B接收系统的采样频率为
${F_{\rm{S}}}$ ,在接收机收到一帧信号后,选取一个参考脉冲电平${H_{\rm{R}}}$ ,以及有效脉冲平坦度范围$\Delta H$ ,从接收信号第1个采样点开始逐点判断其电平幅值$H$ 的有效性,如果时刻${t_{\rm{s}}}$ 处采样点幅值$H > {H_{\rm{R}}} - \Delta H$ ,则认为该采样点幅值有效;若在近邻${N_{\rm{S}}} = {F_{\rm{S}}} \times 0.5\;{\rm{\mu s}} + \Delta N$ 采样范围内,有效采样点个数$N$ 的占有率$p = {p_0}$ 满足$N/{N_{\rm{S}}} \geqslant p$ ,则认为该${N_S}$ 个采样点组成了一个有效的ADS-B码片脉冲${\rm{P}}$ ,脉冲前沿时间为${t_0} = {t_{\rm{s}}}$ 。参数${H_{\rm{R}}}$ 可根据实际接收信号实时计算,参数$\Delta H$ 、$\Delta N$ 、p可根据实际应用环境人为设置,通常${H_{\rm{R}}}$ 由第1个采样点确定,$\Delta H \leqslant 3\;{\rm{dB}}$ ,$\Delta N \leqslant {F_{\rm{S}}} \times 0.1\;{\rm{\mu s}}$ ,$p \geqslant 0.75$ 。在报头结构滑动匹配判断中,首先将有效码片脉冲
${\rm{P}}$ 看作ADS-B报头第1个脉冲,依次从时刻${t_0} + 1\;{\rm{\mu s}} \pm \Delta T$ 、${t_0} + 3.5\;{\rm{\mu s}} \pm \Delta T$ 和${t_0} + 4.5\;{\rm{\mu s}} \pm \Delta T$ 处作为起始时刻计算时间窗${N_{\rm{S}}}$ 内有效采样点个数${p_1}$ 、${p_2}$ 和${p_3}$ ,若${p_1}$ 、${p_2}$ 和${p_3}$ 中至少有两个满足${p_i} \geqslant p$ ,$i = 1,2,3$ ,则${P_1} = {p_1} + {p_2} + {p_3}$ ,否则${P_1} = 0$ ;再将有效码片脉冲${\rm{P}}$ 看作ADS-B报头第2个脉冲,依次从时刻${t_0} - 1\;{\rm{\mu s}} \pm \Delta T$ 、${t_0} + 2.5\;{\rm{\mu s}} \pm \Delta T$ 和${t_0} + 3.5\;{\rm{\mu s}} \pm \Delta T$ 处作为起始时刻计算时间窗${N_{\rm{S}}}$ 内有效采样点个数${p_1}$ 、${p_2}$ 和${p_3}$ ,若${p_2}$ 和${p_3}$ 中满足${p_i} \geqslant p$ ,$i = 2,3$ ,则${P_2} = {p_1} + $ ${p_2} + {p_3}$ ,否则${P_2} = 0$ 。在ADS-B信号报头最终判断中,若
${P_1} = {P_2} = 0$ ,则判决脉冲${\rm{P}}$ 为无效报头信号;若${P_1} \geqslant {P_2}$ ,且${P_1} > 0$ ,则判决脉冲${\rm{P}}$ 为有效ADS-B报头信号的第1个脉冲,ADS-B信号报头起始时刻为${t_0} = {t_{\rm{s}}}$ ;若${P_2} \geqslant {P_1}$ ,且${P_2} > 0$ ,则判决脉冲${\rm{P}}$ 为有效ADS-B报头信号的第2个脉冲,ADS-B信号报头起始时刻为${t_0} = {t_{\rm{s}}} - 0.1\;{\rm{\mu s}}$ 。 -
在本文星基ADS-B信号译码应用中,假设ADS-B信号传输空间为一个线性系统,在一帧ADS-B信号传输过程中,该空间系统参数恒定,则从机载ADS-B发射机的无噪信号
$x(t)$ 、空间系统参数$s(t)$ 和星基ADS-B接收系统收到的信号$r(t)$ 之间满足如下关系:式中,*表示卷积和计算;噪声
${{{n}}_{\rm{e}}(t)}$ 满足高斯白噪声分布。因此,在接收到信号
${{r(t)}}$ 后,若能够估计出${{s(t)}}$ 和${{{n}}_{\rm{e}}({ t})}$ ,则使用反卷积算法即可完成原始无噪信号${{x(t)}}$ 的估计。为便于计算,将卷积计算公式转换成矩阵形式:式中,
${{R}}$ 、${{X}}$ 和${{n}}$ 分别为${{r(t)}}$ 、${{x(t)}}$ 和${{{n}}_{\rm{e}}({ t})}$ 的离散序列表示;若将s(t)离散化表示为一维序列S,则S为S形成的二维计算矩阵。根据卷积定义,若
${{x(t)}}$ 和${{s(t)}}$ 的采样点个数分别为$M$ 和$L$ ,则${{r(t)}}$ 的采样点个数应该为$M + L$ ,并且离散序列满足:估计误差为:
根据最小均方误差准则,最佳的参数
${{{X}}_{{\rm{opt}}}}$ 应该使上述误差的均方误差最小,即:取得最小值或者极小值,式(6)称为均方误差性能函数。
-
反演译码的前提是能够具备系统参数
${{S}}$ 的估计值。ADS-B信号报头不包含任何有用信息,结构稳定,因此,在完成ADS-B信号报头检测后,根据反演计算方法[12]可以利用从检测到的报头数据和标准的报头数据得到系统参数${{S}}$ 的估计值。假设检测出ADS-B信号的报头部分为
${{{R}}_{\rm{P}}}$ ,标准ADS-B信号报头数据为${{{X}}_{\rm{P}}}$ ,将式(6)中的待求参数换成${{S}}$ ,则:令:
直接计算可得:
理论上讲,标准报头数据的幅值不影响最终的参数估计,因为工程应用感兴趣的是参数的波形而不是数值。但是根据式(8)进行反演计算时涉及到矩阵求逆或者迭代求逆计算,检测数据与标准数据之间的幅值相差太大会影响计算结果,因此实际计算中应根据式(1)的损耗计算方法对标准信号进行修正,使其幅度值与实际检测信号幅值相近。
一帧ADS-B报文在传输过程中经历的信道环境完全一样,因此,ADS-B信息报头和数据域两个部分受到空间系统的影响相同。假设该帧ADS-B信号数据部分的一个码片采样数据为
${{{R}}_{\rm{D}}}$ ,期望得到的标准ADS-B信号报头数据码片采样数据为${{{X}}_{\rm{D}}}$ ,则两者与系统参数${{S}}$ ,满足卷积计算式(3),其中${{S}}$ 由S形成。由于${{{R}}_{\rm{D}}}$ 和${{{X}}_{\rm{D}}}$ 长度相同,${{{R}}_{\rm{D}}}$ 实际选取${{{X}}_{\rm{D}}}$ 与${{S}}$ 卷积和的中间部分,相对应的,矩阵${{S}}$ 行也应进行截断处理。即从原始矩阵${{S}}$ 的第${L / 2}$ 行开始,保留包括该行在内的后续$M$ 行数据,使其矩阵行数与${{{R}}_{\rm{D}}}$ 长度相匹配。在反演译码计算中,直接将式(9)中的${{{X}}_{\rm{P}}}$ 替换为${{S}}$ ,${{{R}}_{\rm{P}}}$ 替换为${{{R}}_{\rm{D}}}$ ,采用矩阵求逆方法或者线性迭代方法。一帧ADS-B信号的数据域包括了112个码元,反演译码分为224个窗口进行。最后对反演得到的整段ADS-B报文数据进行码元脉冲波形修正,使各码元具有标准的方波脉冲特征。修正方法仍采用单脉冲检测技术,经过波形修正后的波形即为完整的ADS-B报文脉冲序列,计算机读取该标准方波序列即可实现对该ADS-B报文中有用信息读取。
2.1. ADS-B信号报头检测




























































2.2. 反演译码原理





















2.3. 反演译码流程























-
为了验证本文译码方法的有效性,将该方法应用到一帧1090ES模式ADS-B信号的前40 μs部分译码中,并将该译码方法与常规单脉冲方法比较,本文译码方法过程包括报头检测、空间系统参数估计、数据域译码3个步骤,各步骤中的参数如表1所示,信道干扰为加性随机高斯白噪声,常规单脉冲检测方法相关参数与表1中相同。
阶段 参数内容 数值 信号生成 采样频率${F_{\rm{S}}}$/MHz 40 标准脉冲幅值 1 信噪比/dB −1.58 报头检测 脉冲平坦范围$\Delta H$/dB 2 采样偏差范围$\Delta N$ 4 检测偏差时间$\Delta T$/μs 0.1 有限采样点占有率p/% ≥90 空间系统参数估计 标准报头截选时间段/μs [0,5] 接收报头截选时间段/μs [0,5] 系统参数持续时间/μs 0.5 数据域译码 标准数据码片长度 20 接收数据码片长度 20 系统参数长度 20 仿真实验中模拟的ADS-B信号数据域第1~5位设置为10001,第6~8位为010,第9~32位地址位设置为0。为数据观测方便,本文仿真实验只对上述部分的ADS-B报文做译码测试,测试结果并不影响整体性能分析。另外,本文实验中使用的模拟ADS-B报文码元组成仅为了仿真实验观测方便,并不代表真实ADS-B报文结构。
-
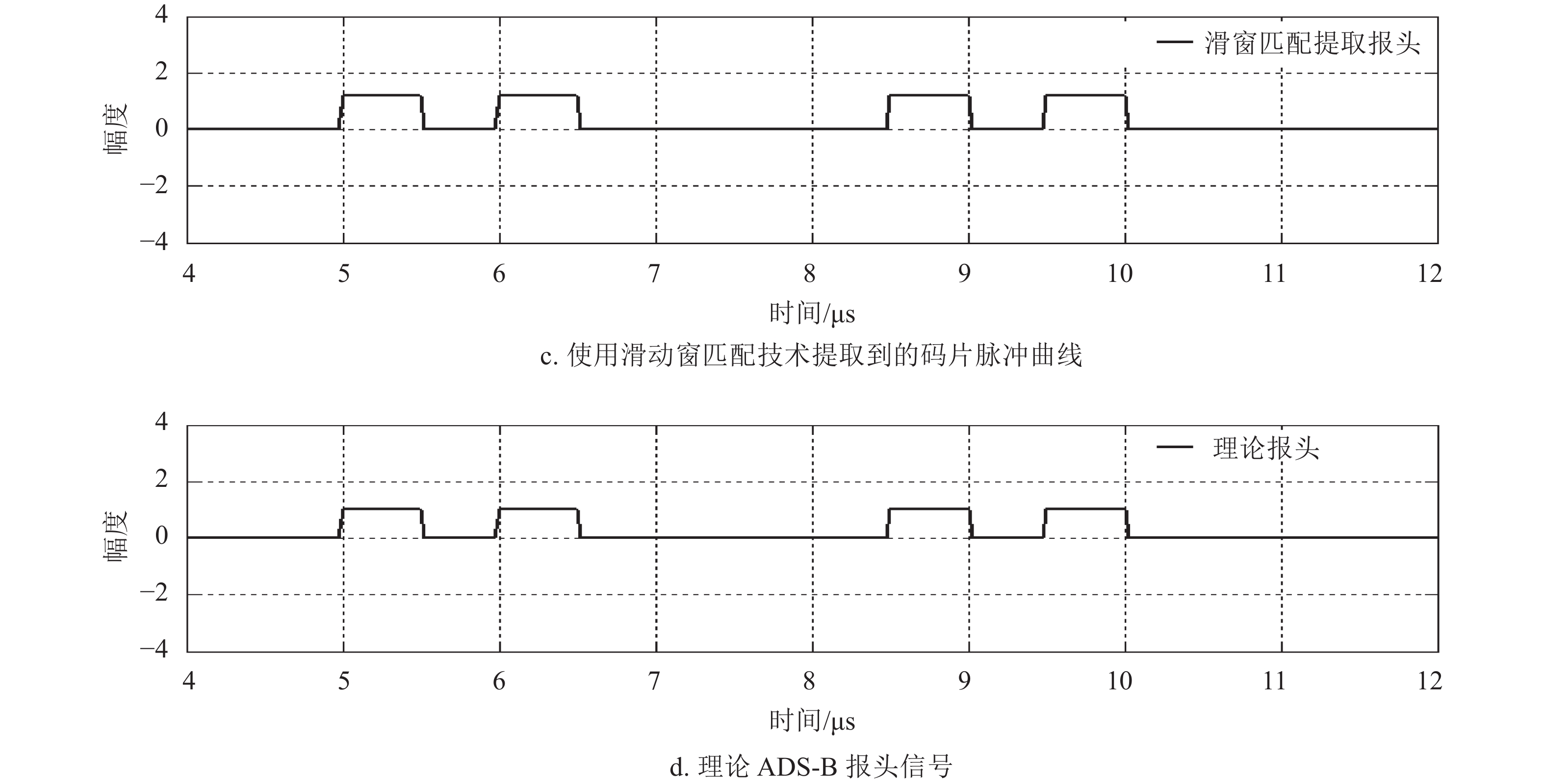
仿真ADS-B信号按表1中信号生成参数产生,报头信号幅度值为1,信噪比为−1.58 dB,仿真实验中数据采样率为40 MHz,ADS-B信号报头到达时间为5 μs,分别采用常规单脉冲检测技术和本文滑动窗匹配检测技术提取该信号报头,两方法中的参考脉冲电平
${H_{\rm{R}}}$ 为含噪接收信号0 μs时刻开始前20个波峰平均值,两方法其他参数与表1中报头检测部分设置参数一致。实际报头检测结果如图2所示,由图可见,常规单脉冲检测技术将含噪接收信号中疑似码片的信号段提取出来,并标记为有效码片脉冲,但是缺乏报头整体判断,该方法在第4~12 μs时间段内从该段信号中共检测出7个码片脉冲,实际只有3个与理论ADS-B报头的第2、3和4码片脉冲位置吻合。滑动窗匹配方法在单脉冲提取结果的基础上识别出ADS-B的第1个码片脉冲位置,其他无效位置上提取的疑似码片脉冲全部被抑制,实测第1个检测码脉冲前沿时刻为5 μs,第4个码脉冲结束时刻为10 μs,滑动窗匹配检测方法提取出的信号报头与理论信号报头码片脉冲位置完全一致。

-
按照ADS-B信号报头检测结果,选取图2中4.75~10.25 μs段含噪接收数据为
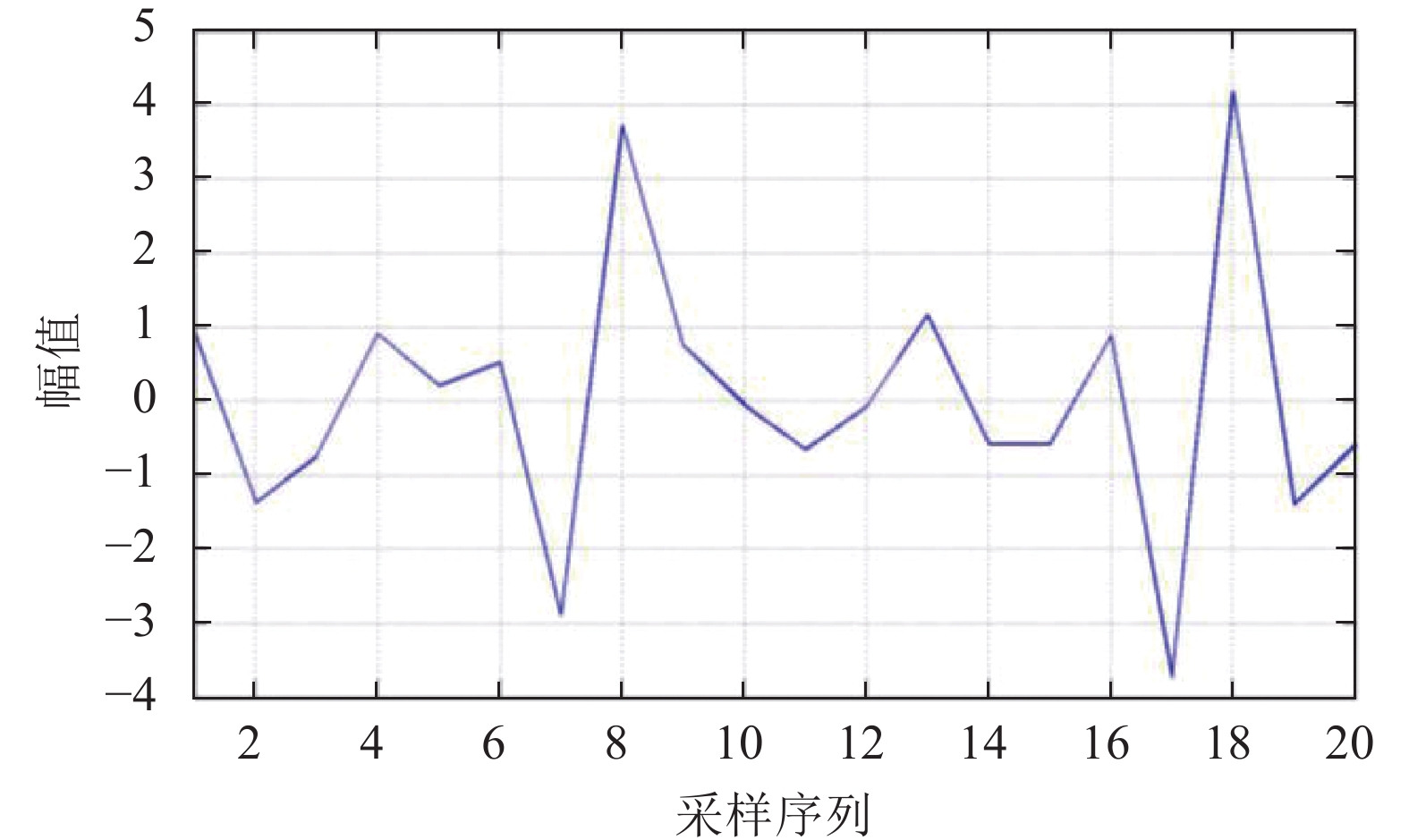
${{ R}_{\rm{P}}}$ ,标准ADS-B信号报头部分为${{{X}}_{\rm{P}}}$ ,信号传输空域的状态参数为${{S}}$ ,根据反演计算式(9)可得持续时间0.5 μs的空间系统状态参数分布如图3所示。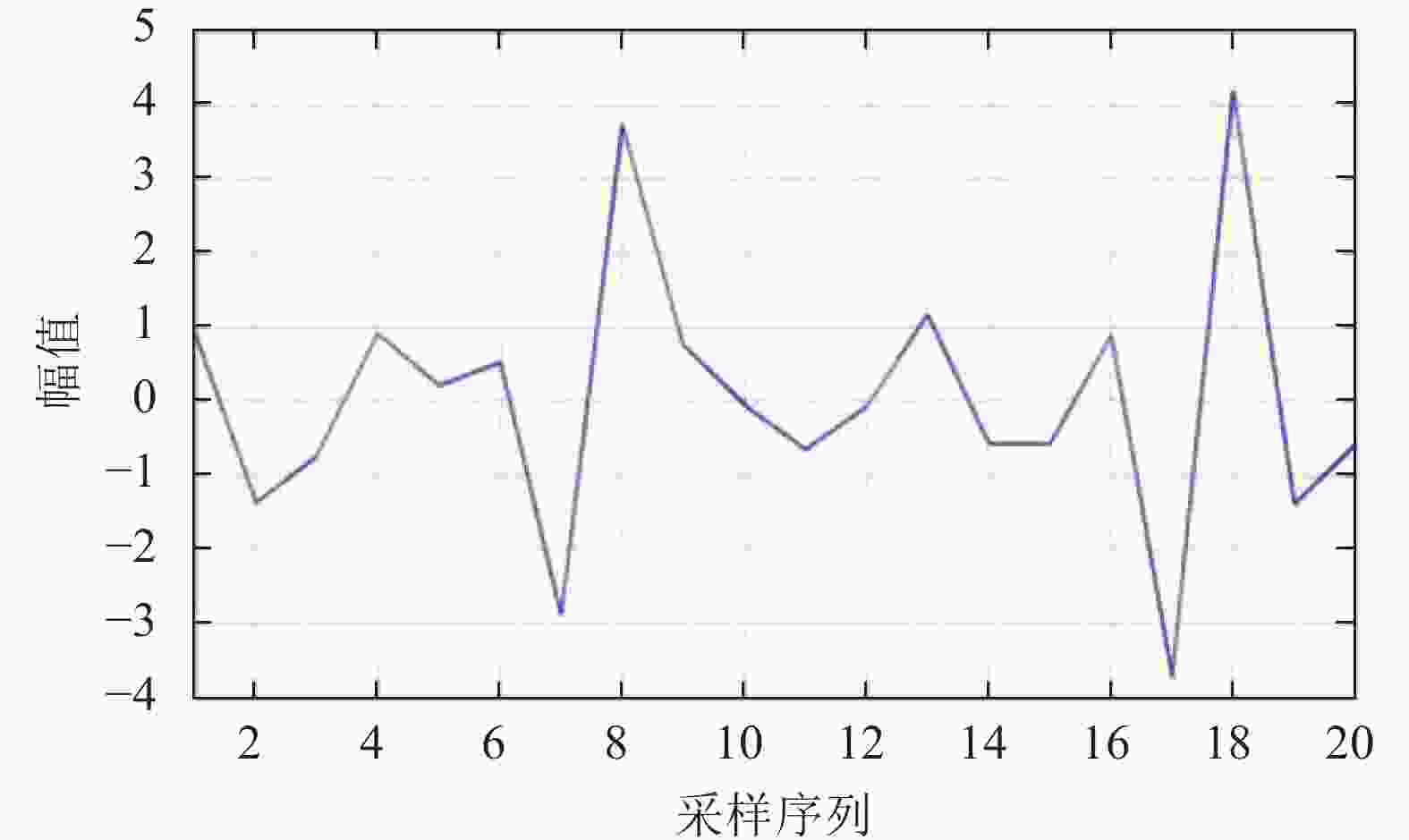
空间系统参数并没有固定的数值结构,只与信号传输当时的空间状态有关,在不同时段和不同空间位置传输的ADS-B信号所经历的空间系统参数不能通用。
-
假设同一帧ADS-B信号在空间传输过程中空间状态稳定,该帧广播信号各段数据经历的空间系统参数完全相同,构造反演系统参数矩阵为:
在对接收信号数据域反演计算中,一个码元接收数据RD和待求码元数据XD长度均为L,则三者的卷积计算可表示为:
则第i个码元处的反演计算式为:
式中,
${{{R}}_{{\rm{D}}i}}$ 为第i个码元接收数据;${{{X}}_{{\rm{D}}i}}$ 为第i个码元反演数据。从接收到的ADS_B信号第
$t = {t_0} + 8$ 处开始依次截选时间窗为0.5 μs的数据作为数据域一个码元长度数据RD,窗口内数据采样点数为$L = {F_{\rm{s}}} \times \Delta t =$ $ 40 \times 0.5 = 20$ 。按照式(12)通过滑动窗口分步完成对数据域的反演计算。为了保持反演计算结果数据的完整性,再对报头部分的数据进行反演计算,即根据接收到的ADS-B信号第0~
$t = {t_0} + 8$ μs处数据${{{R}}_{\rm{P}}}$ 、系统参数矩阵S,按照式(12)反演计算报头数据XP。对于一帧完整的ADS-B报文信号,反演计算得到的ADS-B信号格式为
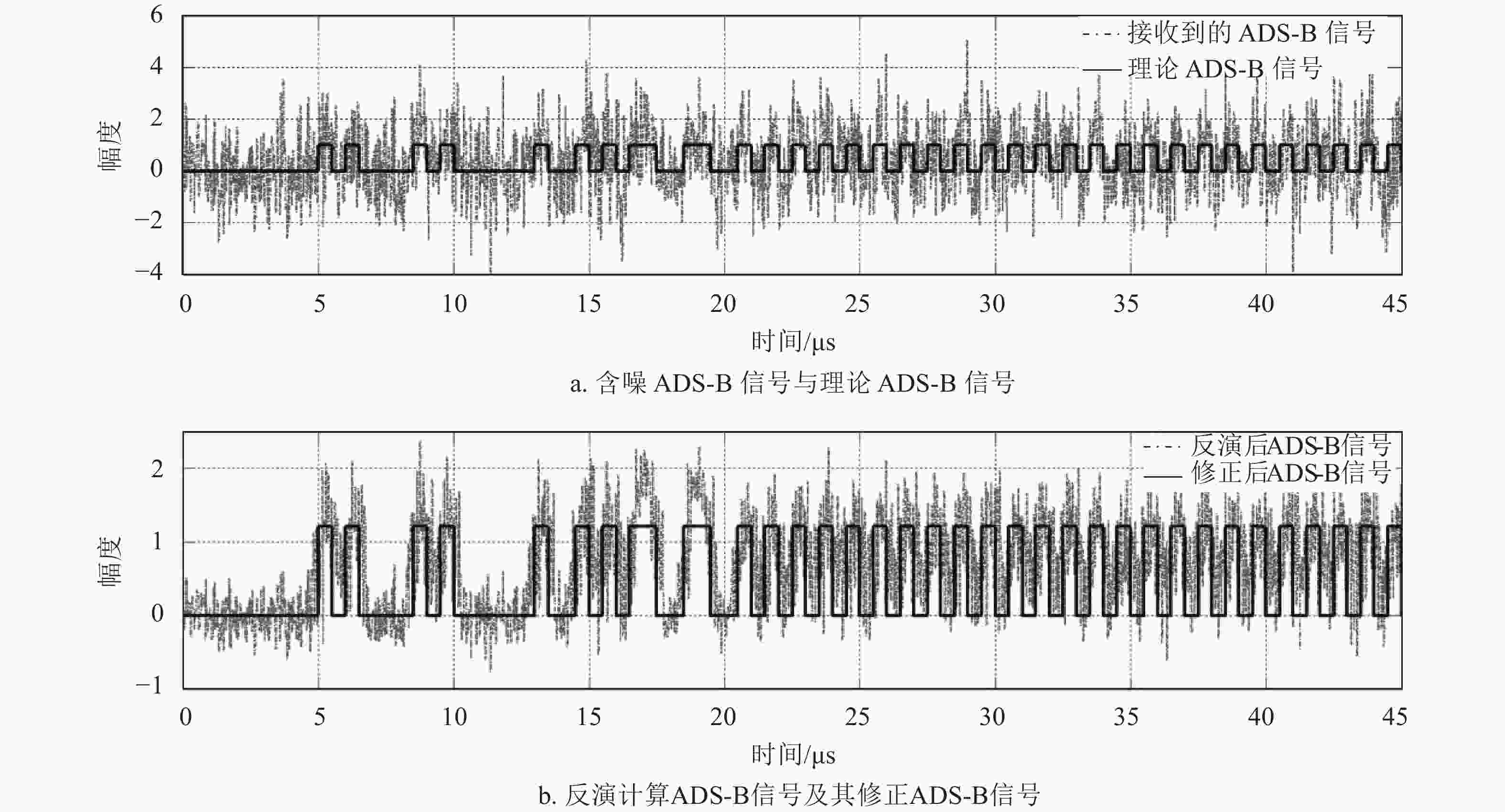
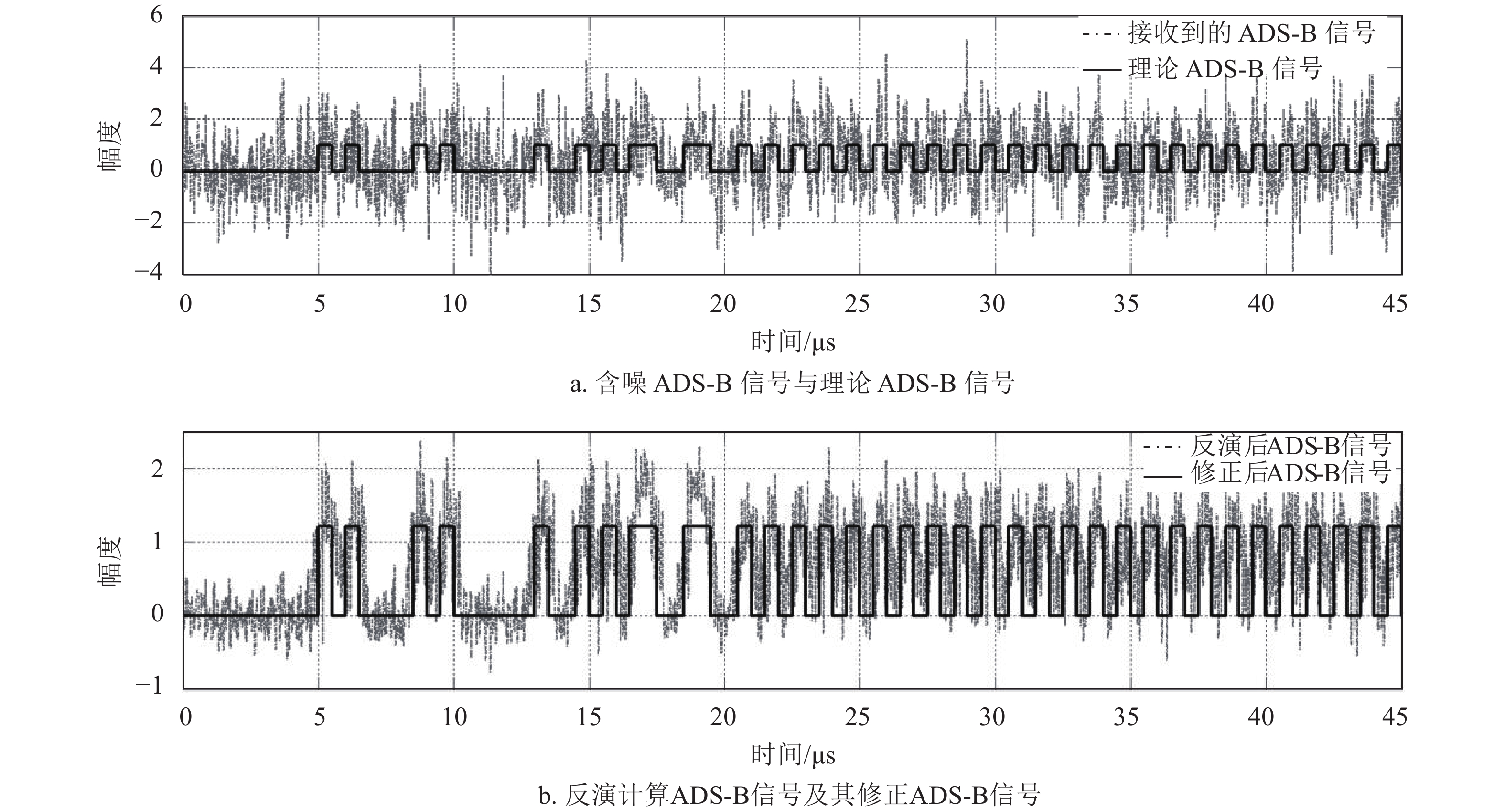
${{X}} = {{{X}}_{\rm{P}}} + \displaystyle\sum\limits_{i = 1}^{224} {{{{X}}_{{\rm{D}}i}}} $ 。对反演得到的ADS-B信号进行波形修正得到最终的报文脉冲序列。按照本文提供的译码操作流程,对该段模拟ADS-B信号进行译码,得到的计算结果如图4所示,图4a中虚线为接收到的含噪ADS-B信号,实线为该段ADS-B信号的理论波形,即无噪声ADS-B信号;图4b中虚线为通过反演计算式得到的ADS-B信号,实线为对反演结果进行波形修正后的ADS-B报文脉冲序列。由图可见,反演计算结果能将ADS-B报文中低电平处的噪声很好地压制,提升报文中高电平处的脉冲特征,通过对反演结果进行简单的波形修正即可得到与理论ADS-B报文完全一致的脉冲序列。
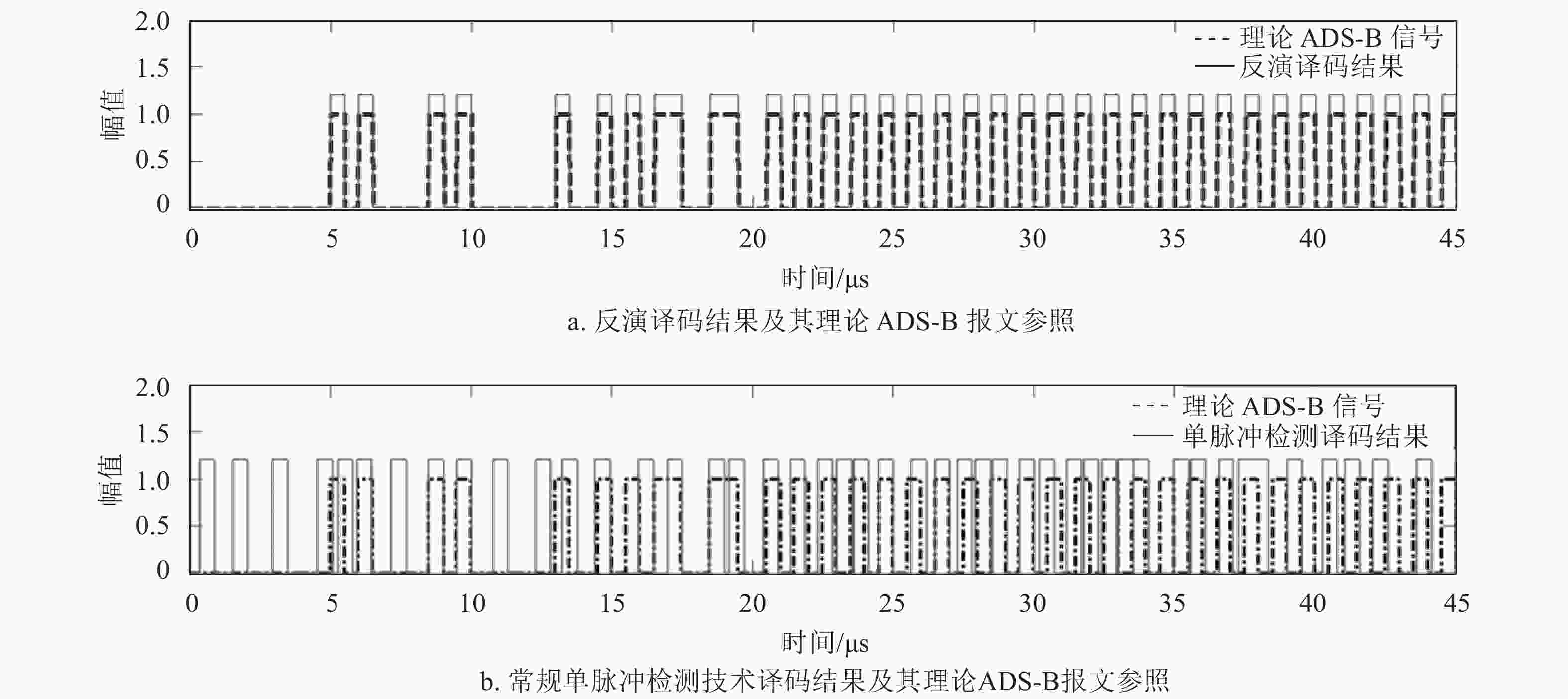
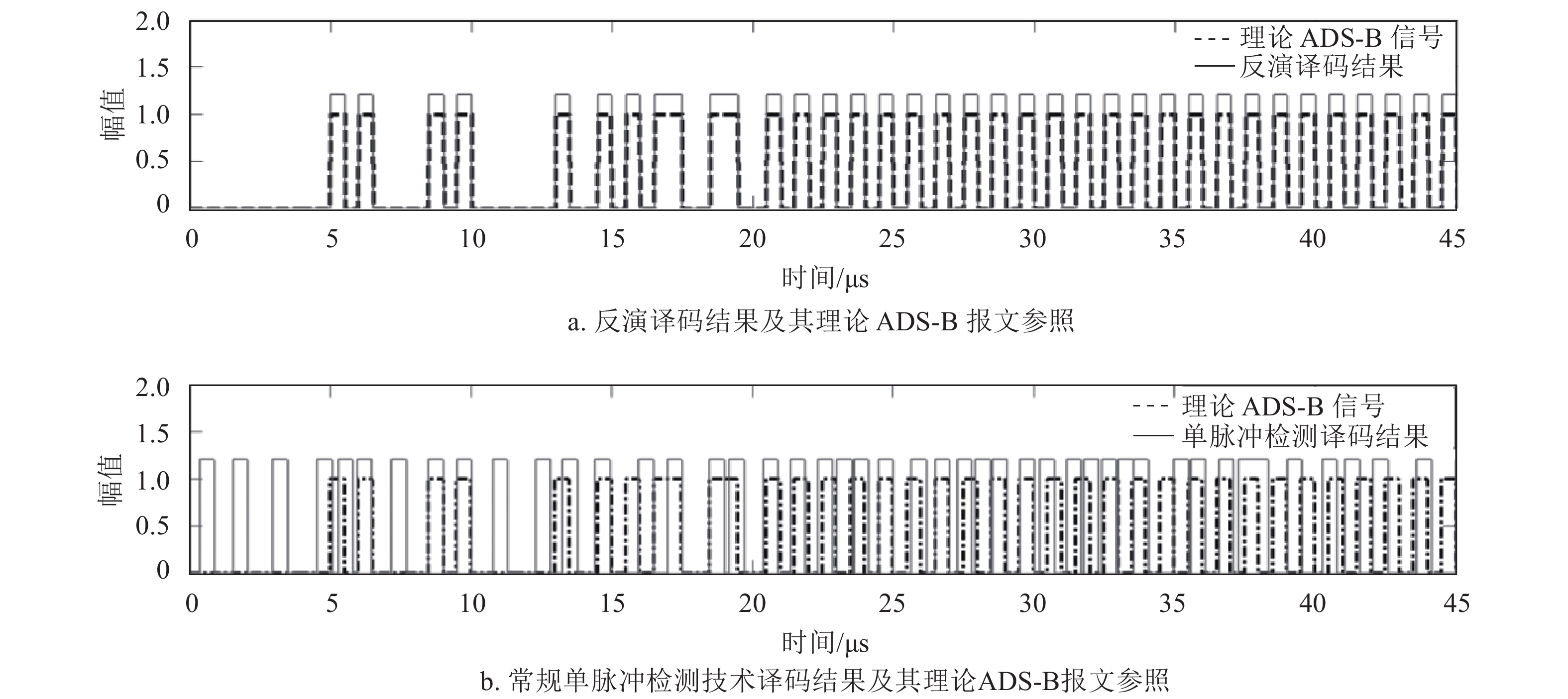
把常规单脉冲检测技术应用到模拟ADS-B信号的译码中,将检测结果与本文的反演译码结果进行对比。图5为两种方法得到的译码结果,其中,图5a为反演译码结果及其理论ADS-B报文参照,图5b为常规单脉冲检测技术译码结果及其理论ADS-B报文参照。由图可见,反演译码结果的每个码元脉冲位置均与理论ADS-B报文脉冲序列完全吻合,单脉冲检测技术得到的译码脉冲则很少能与理论ADS-B报文脉冲位置重合,并且该方法得到了大量的无效脉冲。单脉冲检测技术在本文实验中译码效率低下的主要原因是模拟信号的信噪比低,噪声高能量和高平稳特性掩盖了原始报文的高低电平特征,限制了单脉冲检测技术的性能。通过该组对比实验进一步验证了本文提出的反演译码方法的有效性。
3.1. 实验场景设置
3.2. 仿真结果分析
3.2.1. 报头检测

3.2.2. 空间系统参数估计



3.2.3. 数据域反演译码








-
低信噪比下的星基ADS-B信号检测与译码是星基ADS-B中的难点。本文提出了一种基于反演策略的译码技术,假设传输一帧ADS-B信号的空间在传输信号的时间段内是一个稳定的线性系统,接收端接收信号是发射端信号与该现行系统的卷积和。利用1090ES模式ADS-B信号报头特点,本文设计了一种反演译码算法流程,并通过仿真试验进行了验证,结果表明本文方法能在信噪比为−1.58 dB的情况下实现对ADS-B信号各码脉冲准确译码,正确率远高于常规单脉冲检测技术。
虽然将反演技术应用于星基ADS-B信号译码是本文首创,也仅是对该方法进行了理论仿真验证。但反演技术是在多个领域经过实际工程验证的可靠技术,因此,基于反演技术的ADS-B译码方法具有理论可行性。在下一步的研究中,可将该方法应用于实际星基ADS-B信号的译码中,研究适用于实际应用环境特征(如动态性、非平稳性、非高斯性等)的反演模型、反演计算方法、算法适用边界、算法实施流程、不同帧信号空间参数区分等,提高该方法的适用性和稳定性。

 DownLoad:
DownLoad: