 ISSN
ISSN 






-
压制式干扰是一种常用有效的干扰样式,利用大功率干扰信号淹没目标回波[1-3]。旁瓣相消技术是对抗压制式干扰的有效手段之一,但其只能抑制来自天线旁瓣的压制式干扰信号。在随队干扰和自卫式干扰中,压制式干扰信号从雷达天线主瓣进入,从而形成主瓣干扰,严重影响雷达的目标检测性能,此时,旁瓣相消技术将难以奏效。现阶段雷达抗主瓣压制式干扰主要从空域[4-6]、时频域[7-9]、极化域[10]或多域联合[11]的角度进行研究。但是,上述干扰抑制方法都是根据干扰信号在各数据域的结构特征设计的,具有较强的干扰类型针对性。当干扰类型失配时,其干扰抑制能力将会降低甚至失效,例如空域算法要求干扰信号与目标回波存在一定的角度差异,在自卫式干扰情况下完全失效;频域方法在干扰频带完全覆盖目标频谱的情况下,其抗干扰性能严重下降;极化域干扰抑制方法难以抑制未极化或变极化主瓣干扰等。
多站雷达是由几个空间上分开的发射、接收和(或)发射—接收设备组成的一个雷达系统,能够提供丰富的空、时、频资源,通过将接收信息进行融合及联合处理,具备单站雷达所不能到达的整体抗干扰能力[12]。干扰抑制的基本原理是利用干扰与目标信号的某种可分性对干扰信号进行有效抑制,并尽可能地保留目标信号。因此,在多站雷达背景下找到这种差异性是多站雷达主瓣干扰抑制算法的关键。由于目标的RCS随着探测视角的变化而随机起伏,在多站雷达各节点对目标的视角差异足够大的情况下,各接收站接收到的目标回波互不相关。而由于干扰机在各个辐射方向上发射的干扰信号都相同,即使各节点对于干扰机的视角和增益各不相同,但其所接收的干扰信号仍是高度相干,对于不同的干扰样式和调制方式,这种相关性均成立。因此,在多站雷达系统下,干扰和目标信号间存在空间散射特性的差异,即目标回波信号具有各向异性,而干扰信号具有各向同性,这为多站雷达下主瓣干扰抑制算法提供了理论依据。根据这一差异,传统的多站雷达下主瓣干扰抑制方法是基于信号相消[13-14],利用不同接收站中压制式干扰的相关性,通过加权求和,实现干扰信号相消;而目标信号是相互独立的,则可以得到有效保留。但是这种信号相消方法在较高干噪比下,相消后干扰残留能量较大,严重影响后续的目标检测性能。
上述空间散射特性的差异已成功应用于欺骗式干扰鉴别中[15-16],尤其是文献[16]利用该差异在幅度比特征空间完成了欺骗式干扰鉴别。本文将借鉴这种思路,在幅度比特征空间进行主瓣干扰抑制,提出一种基于幅度比特征的主瓣干扰抑制方法。将各接收站接收信号进行时间对齐后,进行逐点幅度相比,根据干扰和目标回波信号的空间散射特性的差异,相比后的序列中,干扰信号将得到“平滑”,而目标位置将“凸显”出来。同时,进一步利用非相参积累的方法有效平均干扰能量,降低干扰随机起伏对幅度比特征的影响。最后,在幅度比特征空间中,利用固定门限检测的方法对凸显出来的目标进行恒虚警检测。这种基于多站雷达幅度比特征的主瓣干扰抑制方法不依赖干扰信号的时频结构特征,能够适用于不同类型不同调制的干扰信号。此外,也无需多站雷达系统的几何布站参数以及各接收站之间的幅相误差等参数,对系统内部结构的变化具有较强的自适应能力。数值仿真结果证明了本文方法的有效性。
HTML
-
多站雷达由单个发射站和N部接收站组成,如图1所示。对K个目标所在区域进行探测,雷达探测区域存在一个压制式干扰机实施支援式干扰,各接收站的波束主瓣都指向干扰机及目标所在区域,即压制式干扰将从主瓣进入各接收站。
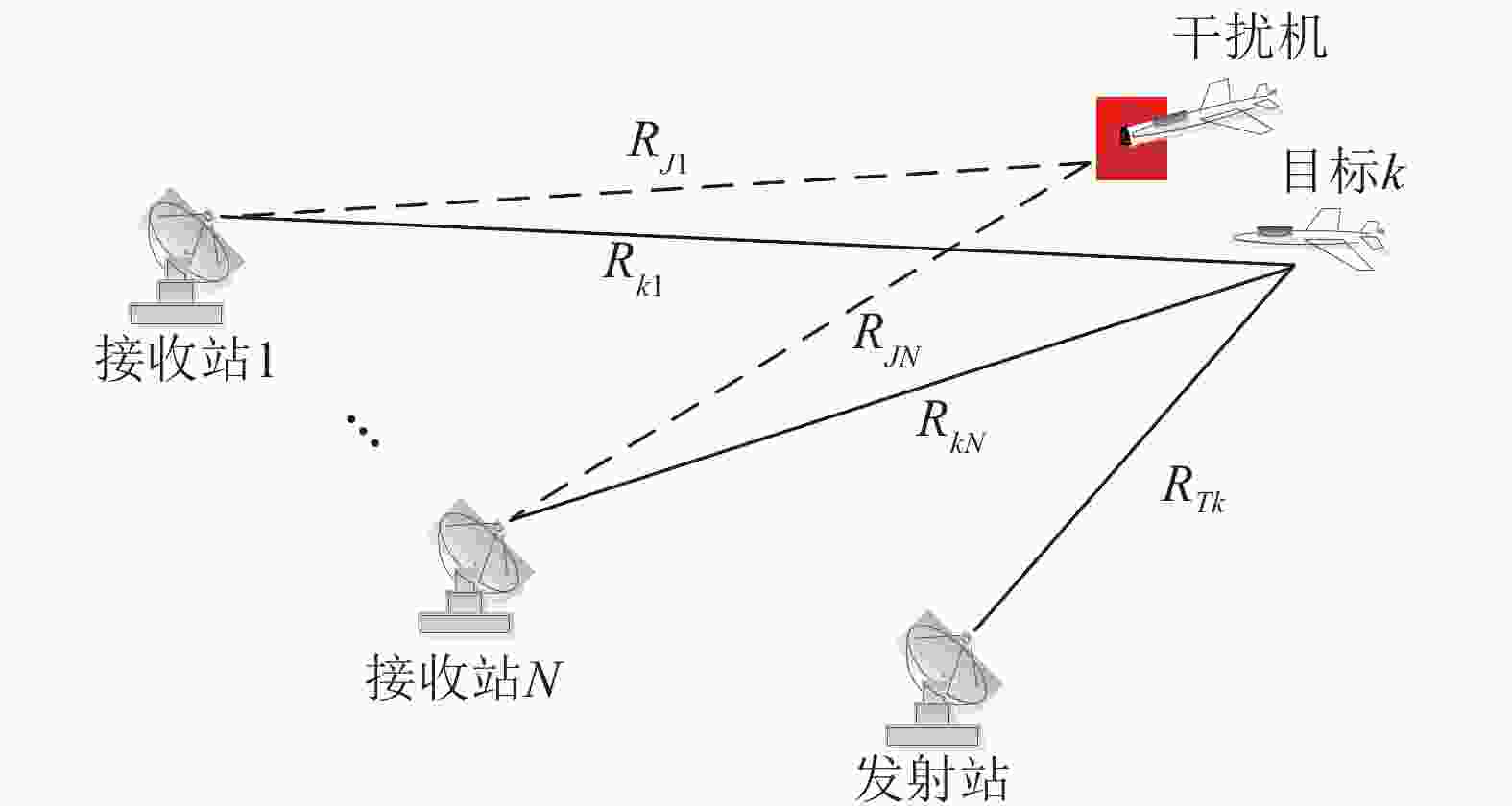
设各站已进行时间同步,第n个接收站中单个脉冲的基带接收信号
${r_n}(t)$ 为目标回波信号${s_n}(t)$ 、压制式干扰信号${j_n}(t)$ 和噪声信号${n_n}(t)$ 的叠加:式中,
$0 \leqslant t \leqslant T$ ,$T$ 是一个脉冲重复周期的时间长度;${n_n}(t)$ 为在不同接收站中相互独立的复高斯白噪声。设
${R_{Tk}}$ 和${R_{kn}}$ 分别为第k个目标到发射站和接收站n的距离,${R_{Tkn}}$ 为沿路径发射站—目标k—接收站n的距离和,即${R_{Tkn}} = {R_{Tk}} + {R_{kn}}$ ,${f_{Tkn}}$ 为沿相同路径的多普勒频率,则目标回波信号${s_n}(t)$ 为:式中,
$c$ 表示光速;$\lambda $ 为发射信号波长;${\alpha _{kn}}$ 为第k个目标在接收站n中的复幅度。根据雷达方程,有:式中,
${\sigma _{kn}}$ 为目标的雷达截面积(RCS);${P_T}$ 为雷达发射功率;${G_n}$ 和${G_T}$ 分别为发射站和接收站的天线增益。在不考虑噪声的情况下,第n个接收站和第
$n'$ 个接收站中,第k个目标的幅度比为:从式(4)中可以看到,由于目标距各接收站的距离不同,相对各接收站的RCS也不同。因此,每个目标的幅度比是各不相同的。此处,假设各接收站间的基线长度足够长,各接收站对目标的视角差异较大,目标在各接收站中的回波是去相关的[17],即各接收站的RCS各不相同。
设干扰信号为
$J(t)$ ,选择多种不同的干扰样式。干扰机到接收站n的距离为${R_{Jn}}$ ,多普勒频率为${f_{Jn}}$ ,则干扰接收信号${j_n}(t)$ 为:式中,
${\lambda _J}$ 为干扰信号波长,一般情况下,可假设其与雷达发射信号波长相同,即${\lambda _J} = \lambda $ 。设干扰机发射信号功率为${P_J}$ ,则干扰信号到达接收站n时的复幅度${\beta _n}$ 为:在第n个接收站和第
$n'$ 个接收站中,干扰信号的幅度比为:在单个干扰机的情况下,其到两个接收站的距离在目标探测时间段内可假设为固定不变,接收站的天线增益也是固定不变。由式(7)可以看到,在不考虑噪声的情况下,不同距离单元内干扰信号的幅度比是完全相同的。






























-
根据目标与干扰信号在幅度比特征上的显著差异,可以通过计算不同接收站回波信号的幅度比,在幅度比特征域进行主瓣干扰抑制及目标检测。本文提出的主瓣干扰抑制算法可以分成以下3步:1)时间对齐。由于干扰机到各接收站的距离各不相同,因此,各接收站接收到的干扰信号都有一定的时延差,在计算幅度比之前,需要将各接收站的干扰信号进行时间对齐。2)计算幅度比以抑制主瓣干扰。在幅度比特征域中,干扰信号所在距离单元的幅度比恒定不变,相当于干扰信号被“平滑”;目标所在距离单元对应的幅度比则是各不相同的,即目标将“凸显”出来。这说明通过将原始接收信号转化到幅度比特征域中,干扰信号得到了有效抑制,显著提高了目标的信噪比。3)在幅度比特征域中,设计恒虚警检测算法,完成目标检测。
-
由于主瓣压制式干扰信号的强度一般远高于目标回波,各接收站接收信号的主分量是干扰信号。因此,可以通过互相关函数估计各接收站所接收干扰信号间的时延差,从而可将各接收站上的干扰信号在时域上对齐。以第一个接收站为参考,接收站n中的干扰信号时延量
${\tau _{1n}}$ 为:式中,
${( \cdot )^*}$ 表示取共轭。时间对齐的具体实施步骤可以分为粗估计和精估计:粗估计是以一个距离单元为单位,搜索时延量的粗估计值;精估计是在粗估计值的基础上,将搜索单位进一步缩小,搜索时延量的精估计值,搜索单位可根据需要的估计精度选择。根据最终得到的干扰信号时延量的估计值${\hat \tau _{1n}}$ ,可以得到接收站n中时间对齐后的接收信号即为$r_n^{}\left( {t - {\tau _{1n}}} \right)$ 。在自卫式干扰的情况下,目标与干扰机的位置完全重合,在将N个接收站接收到的干扰信号在时域上对齐后,目标回波也是完全对齐的。但是,在支援式干扰的情况下,目标和干扰机的位置并不完全重合,目标的回波并不能完全对齐。在这种情况下,为分析简便,假定在将干扰信号对齐后各接收站上的目标回波间的偏移量不超过一个距离分辨单元,这一假设在支援式干扰相距目标较近的情况下一般是成立的。
-
以第一个接收站为参考,定义接收站n中的信号幅度比特征序列为:
对于不存在目标的时刻点(即距离单元):
式中,
一般在主瓣压制式干扰下,各接收站中干噪比JNR较高,因此,在任意时刻t,
${\xi _n}(t) \approx {\kappa _{1n}}$ ,但干扰信号大多随机起伏,各时刻点的瞬时干扰能量有一定概率的降低,在这种情况下,幅度比中独立噪声的影响较大,导致信号幅度比特征序列中出现疑似目标的“尖峰”,带来背景抖动,甚至湮没目标,使得目标“凸显”不明显,严重影响后续目标检测。为解决这一问题,本文对多个脉冲重复周期的回波数据进行非相参积累,可以有效平均干扰能量,降低干扰的起伏情况,再利用积累后的数据计算幅度比序列,从而降低信号幅度比特征序列的背景抖动。此外,N部接收站组成的多站雷达系统,可得到N−1个幅度比特征序列,为进一步降低背景抖动,提高目标信干噪比,将不同接收站得到的N−1个幅度比特征序列
${\xi _n}(t)(n = 2,3, \cdots ,N)$ 进行积累,可以得到总的系统幅度比特征序列$\varXi (t)$ 为:式中,
$E\left[ \cdot \right]$ 表示取均值。在系统幅度比特征序列
$\varXi (t)$ 中,不存在目标的时刻点,干扰信号起到主要作用,其幅度比近似相同,相当于在幅度比特征域得到了“平滑”;对于目标所在的时刻点,由于目标RCS的随机起伏,在不同接收站中不一样,且各目标到不同接收站的距离各不相同,因此,不同目标的幅度比一般是各不相同的,与干扰信号幅度比也不一样,相当于目标在幅度比特征域得到了“凸显”。 -
在幅度比特征域中的目标检测,即为以下二元假设检验问题:
为进行恒虚警检测,需得到背景分布,即
${H_0}$ 假设下系统幅度比特征序列$\varXi (t)$ 的概率密度函数。但是,在${H_0}$ 假设下,$\varXi (t)$ 是由式(10)和式(12)得到,尽管已知其在一个恒定值上下浮动,但是概率密度函数形式复杂,背景分布无法得到其数据表达式,因此,目标检测的恒虚警门限没有闭式解。在这种情况下,本文利用固定门限检测方法进行特征域目标检测。其背景分布仅与干扰样式、背景干噪比JNR和多站雷达系统的布站情况有关。因此,可以在系统每次改变阵地后的自适应时间内对不同典型干扰样式、不同JNR下的检测门限,利用Monte Carlo仿真实验进行离线学习得到,可有效保证特征域目标检测算法的实时性。在实际系统中,背景噪声未必是复高斯白噪声,甚至还可能包括杂波信号,此时,本文提出的特征域目标检测算法都适用,只需要在学习检测门限时直接利用实测的背景信号叠加干扰信号作为学习样本。此外,对于干扰样式和JNR,则需要不断利用回波数据中的干扰信号估计来确定。若在干扰样式较为复杂但在探测时间范围内固定不变的情况下,可以在阵地自适应阶段直接利用包含干扰、噪声(和杂波)的回波信号作为学习样本,得到的检测门限可直接适用于该布站阵列下。
2.1. 时间对齐




2.2. 计算幅度比特征





2.3. 特征域目标检测




-
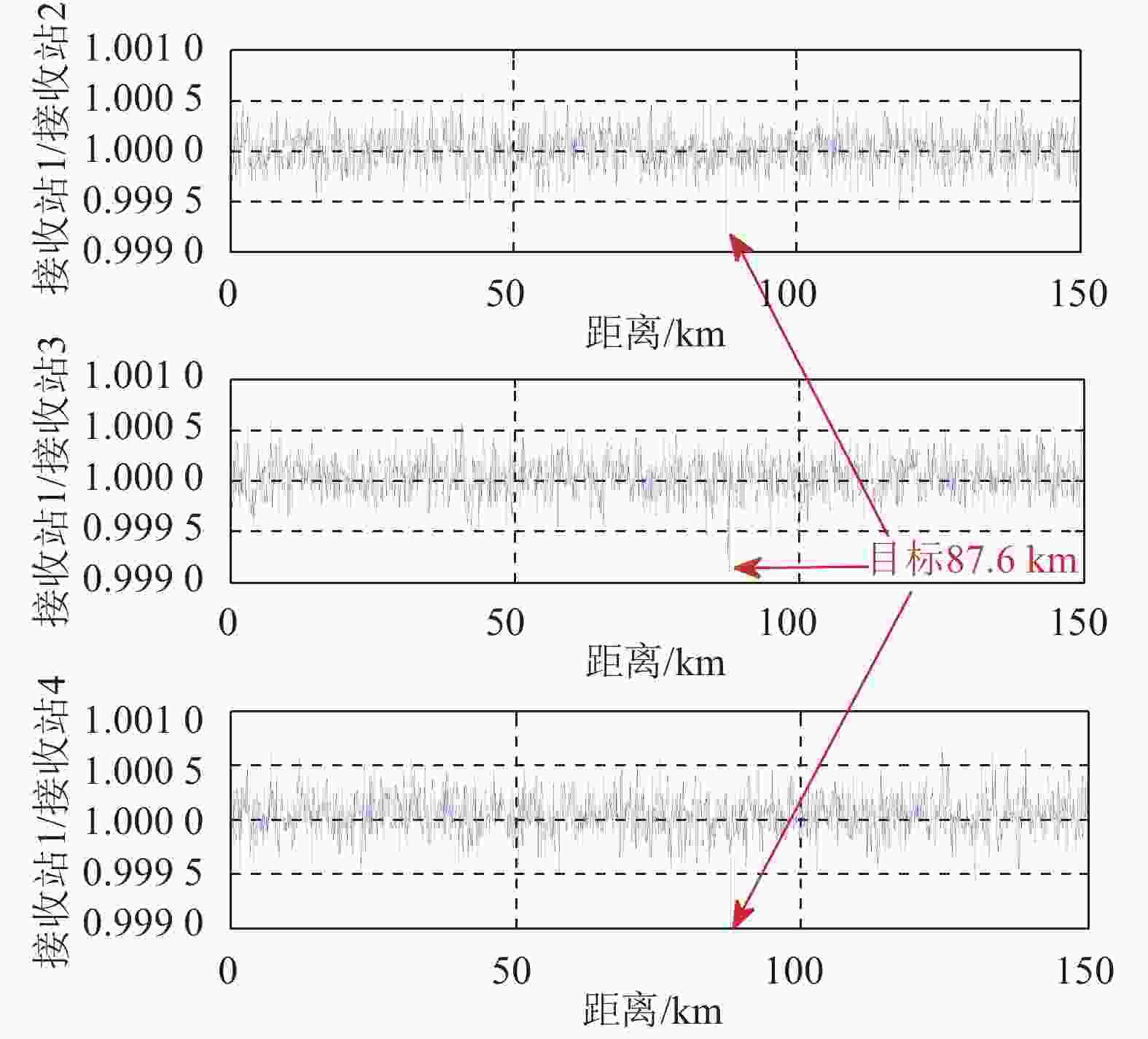
本节通过数值仿真验证本文所提主瓣干扰抑制方法的可行性。仿真参数如下:假设多站雷达系统由1部发射站、4部接收站组成,不同接收站参数如表1所示。发射站与第一个接收站共置,发射信号载频为3 GHz,脉冲积累个数为8。目标位置坐标为[31,31] km,距接收站1的距离为87.6 km,速度矢量为[−40,−13] m/s,定义参考信噪比为接收站1中脉压后的信噪比SNR=8 dB。压制式干扰机的位置坐标为[0,30] km,速度矢量为[−45,−15] m/s,干扰样式为噪声调幅干扰,同样定义参考干噪比为接收站1中脉压后的干噪比JNR=60 dB。
接收站1 接收站2 接收站3 接收站4 位置坐标/m [0,0] [150,0] [−300,0] [300, 0] 天线增益/dB 20 20 20 20 -
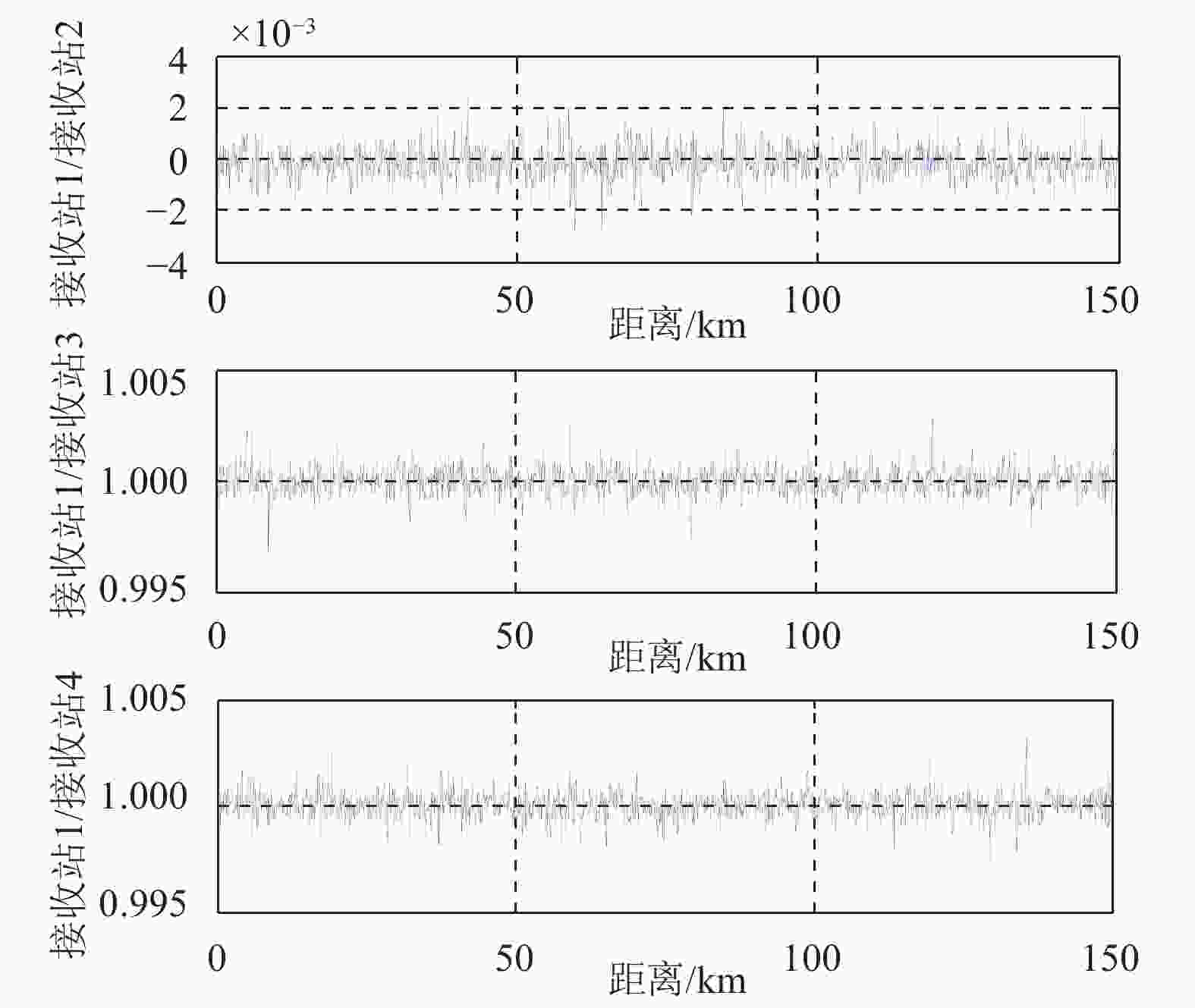
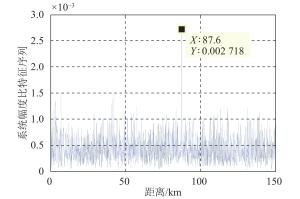
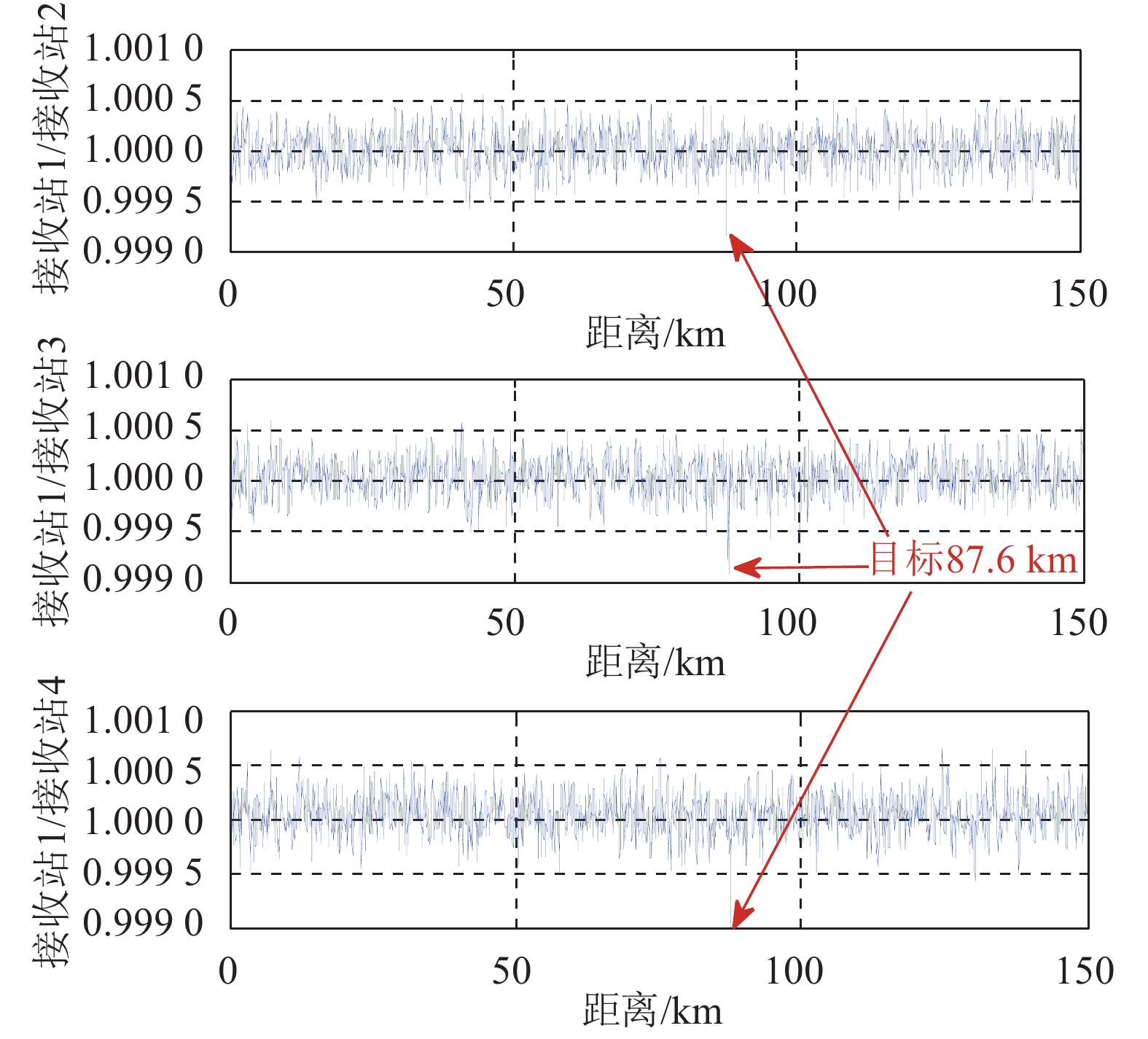
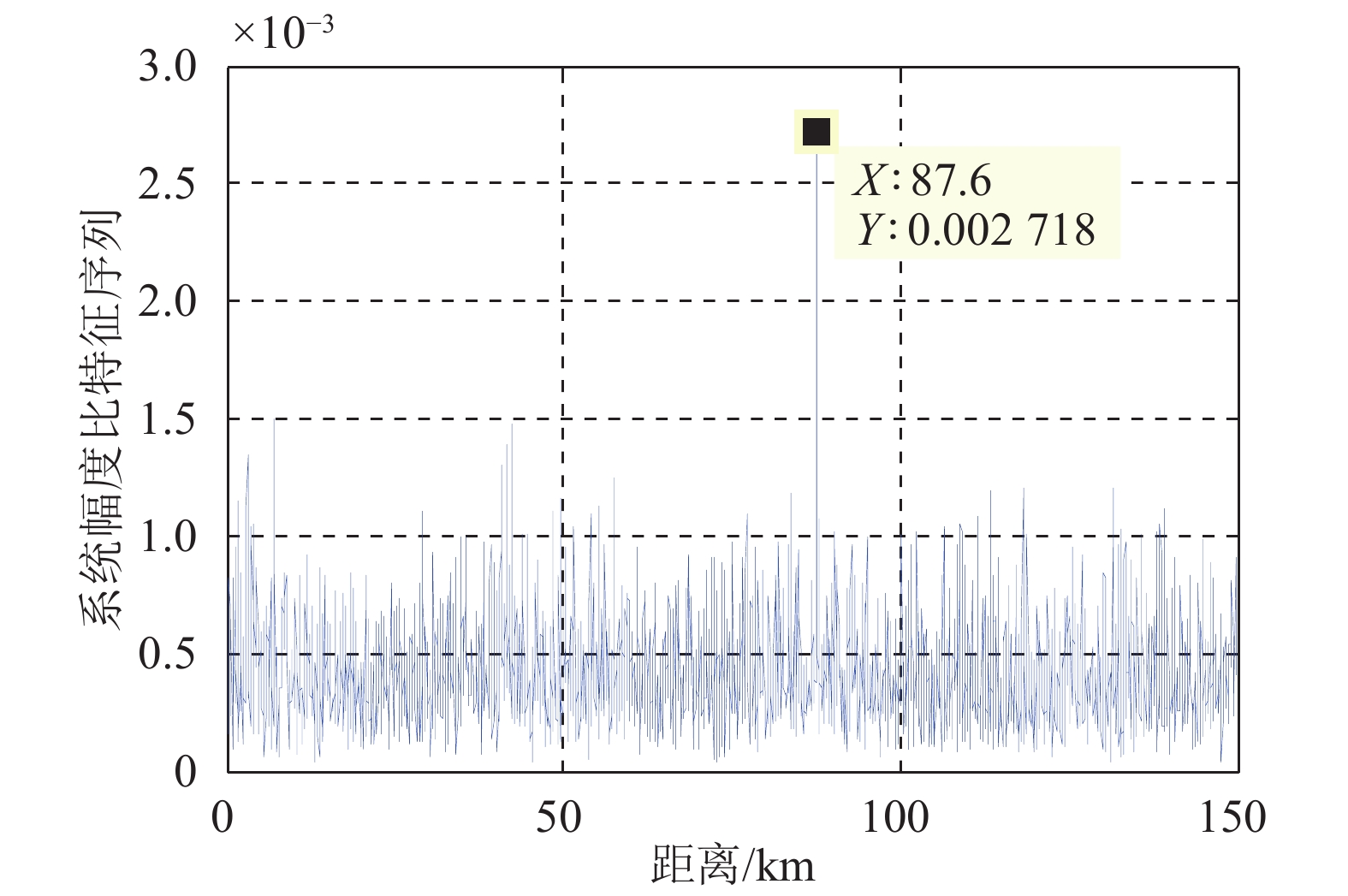
多站雷达在进行时间对齐后,利用单个脉冲重复周期数据得到的3个幅度比序列信号如图2所示,可以看到幅度比信号中背景的抖动比较严重,有比较多的“尖峰”出现,目标被完全覆盖了,“凸显”不明显。这是由干扰信号起伏所带来的,也正是本文采用非相参积累后的回波数据计算幅度比特征的原因。对8个脉冲重复周期的回波进行积累后,得到幅度比特征序列如图3所示,可以看到不同接收站的幅度比均在目标位置“凸显”,目标所在距离单元存在明显“尖峰”,说明通过将时域数据转化到幅度比特征域中,干扰信号得到了有效抑制,目标得到了保留。进一步根据式(12)将不同接收站的幅度比信号做积累,得到系统幅度比特征序列,结果如图4所示,在目标所在距离单元,幅度比特征突出更加明显,信噪比得到提高,更有益于后续目标检测。
-
在恒虚警概率
${P_{{\rm{fa}}}} = {10^{ - 4}}$ ,${10^{ - 5}}$ 两种情况下,利用Monte Carlo仿真实验得到该多站雷达系统下的特征域检测门限,如图5所示。可以看到JNR越高,门限越低。这是由于干扰能量越高,幅度比特征序列的背景越平稳,起伏越小。因此,恒虚警概率下的门限越低。设虚警概率
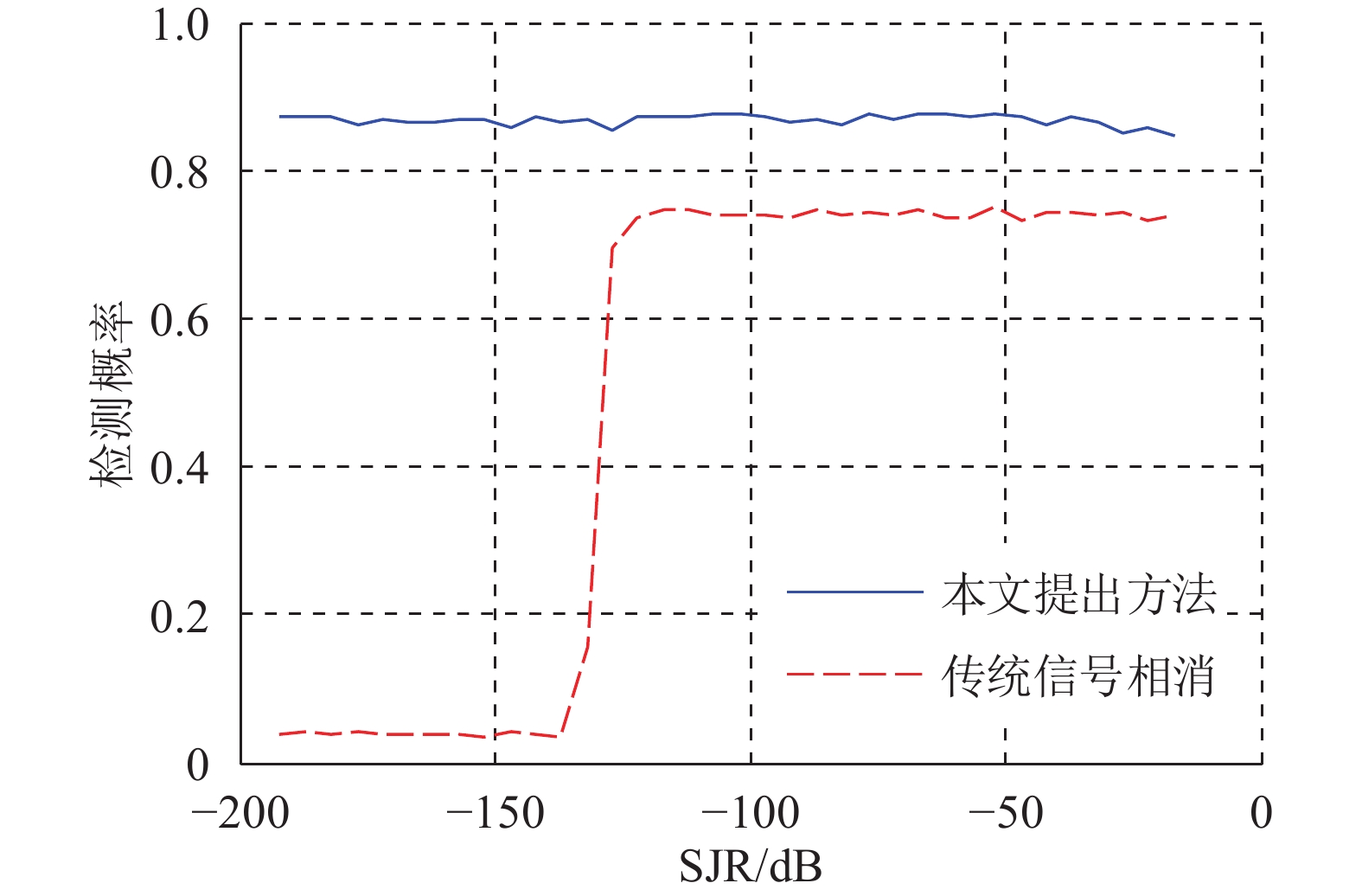
${P_{{\rm{fa}}}} = {10^{ - 5}}$ ,利用固定门限方法对目标在幅度比特征域进行检测,通过1 000次Monte Carlo仿真实验,统计得到不同信干比SJR下的目标检测概率如图6所示,并与文献[13]中传统信号相消方法进行比较。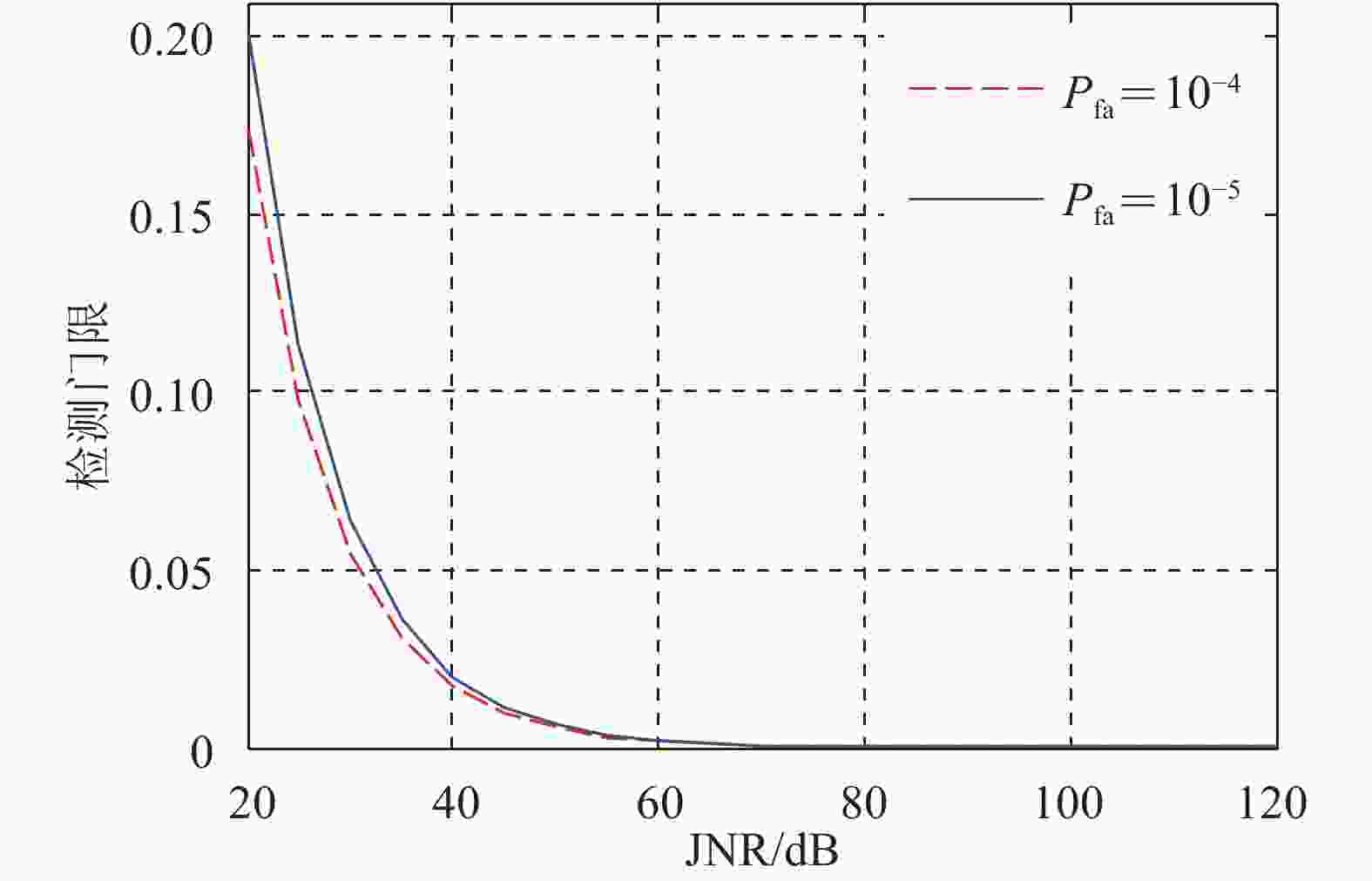
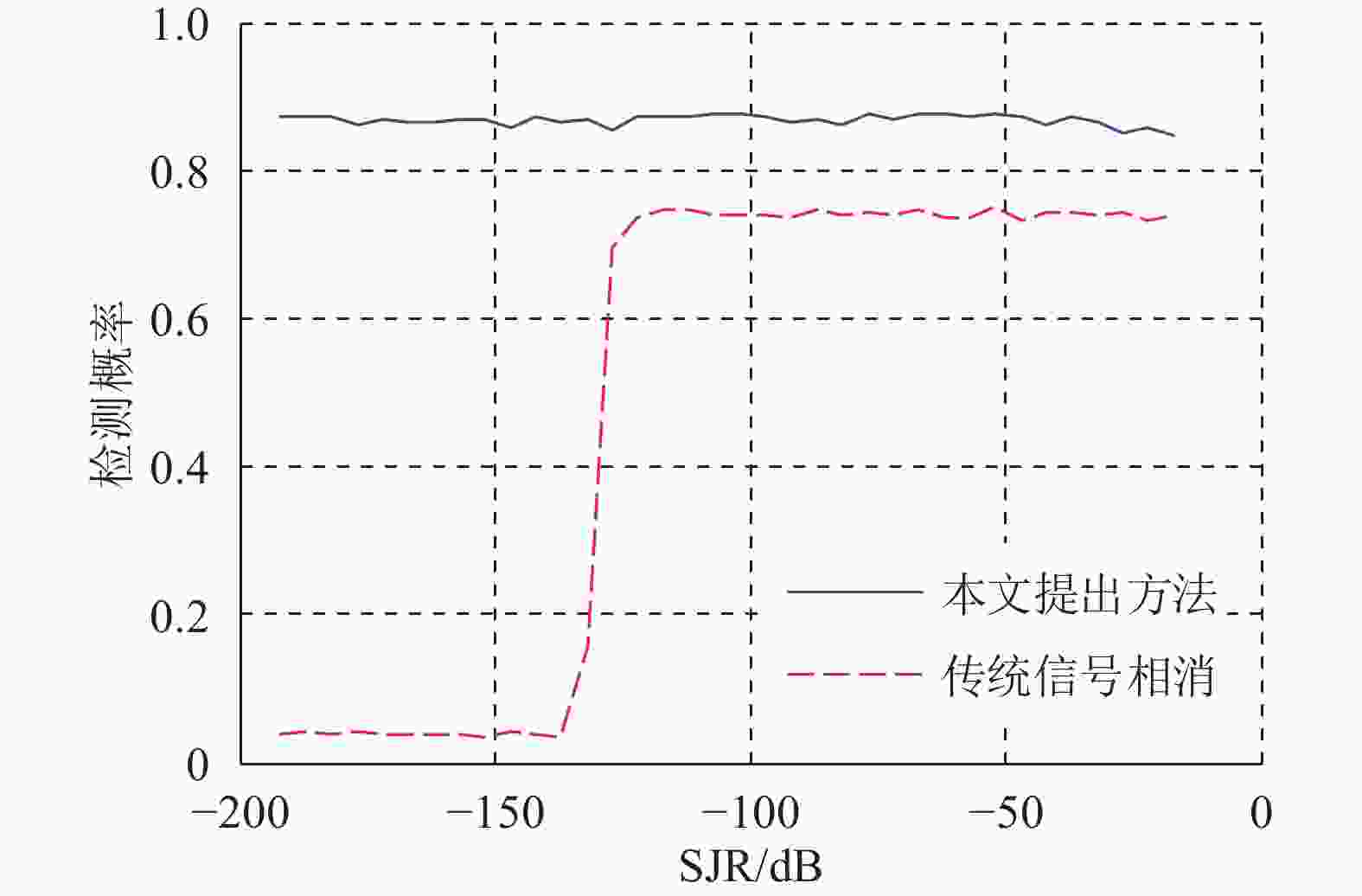
本文提出在幅度比特征域进行主瓣干扰抑制,与传统干扰信号相消的思路完全不同。从图6中可以看到,相比于传统干扰信号相消算法,本文算法在不同SJR下均可以得到更好的目标检测性能。此外,传统信号相消方法算法是在功率域进行干扰抑制和目标检测,其性能与SJR有较大关系,尤其在低SJR下,算法性能下降明显,这是由于干扰能量大,相消后残留干扰能量较高带来的。相比于现有方法,信干比SJR对本文算法性能影响较小,提出算法对目标的检测性能仅依赖于SNR的大小,在较低SJR的情况下,检测概率仍然比较高。这是因为本文算法在幅度比特征域进行干扰抑制和目标检测,干扰能量越高,干扰信号和目标回波信号在幅度比特征的差异越大,所以仍可以获得比较好的检测性能。在信号相消方法性能下降的情况下,可利用本文方法对目标进行有效检测。
3.1. 幅度比特征序列仿真

3.2. 特征域目标检测算法仿真




-
本文提出一种基于幅度比特征的多站雷达主瓣压制式干扰抑制方法,通过将时域回波信号转化到幅度比特征域,干扰信号由于其相关性将被“平滑”,而目标回波的各向异性导致目标被“凸显”,并进一步提出基于固定门限的特征域目标检测方法。相比于传统基于信号相消的多站雷达主瓣干扰抑制方法,本文方法可以得到更高的目标检测性能,尤其是在JNR较大的情况下,仍可以保持较高的目标检测概率。在实际使用本文算法时,检测门限可以在阵地自适应期间预先离线学习得到,大大提高了算法的实时性。此外,在预设门限后,还可以根据实际情况对门限进行适当调整,以自适应战场环境变化。

 DownLoad:
DownLoad: