 ISSN
ISSN 



-
与传统的6 GHz以下的通信相比,具有千兆赫带宽可用性的毫米波(Millimeter Wave, mmWave)通信具有更高的容量和传输速率[1-2]。但毫米波信号的传输距离较短,且易受到障碍物的影响。因此,引入智能反射面(Reconfigurable Intelligence Surface, RIS)来增强毫米波信号的传输和接收。与有源放大转发中继不同,RIS基本由无源反射元件组成,没有RF射频单元,具有低成本、低功耗、可编程、易部署等特点[3]。此外,RIS的每个智能超表面单元可以调整其振幅和相位参数,以增强基站(Base Station, BS)的输入信号实时反射给用户,从而经济有效地提高网络性能[3-6]。
最近,RIS辅助通信的场景已得到了广泛的关注[7-8]。文献[7]研究了RIS辅助的无人机通信系统的物理层安全。文献[8]将RIS部署到多用户MIMO通信中,并提出了一个基于并行因子分解的信道估计框架,以展开所产生的级联信道模型。RIS处的无源波束赋形可由BS通过RIS控制。因此,为了使RIS的增益最大化,基站和RIS的波束赋形通常是联合设计的[9-10]。文献[9-10]的波束赋形设计均为连续相位;在文献[11-13]中,波束赋形设计问题被推广到离散相位,其中文献[11-12]研究了RIS处的离散反射波束赋形,文献[13]研究了基站处的离散发射波束赋形。大多数研究假设BS和RIS之间存在丰富的散射[15-16],但涉及毫米波传输时,应考虑低阶BS-RIS信道[9]。文献[17]从mmWave的角度研究了RIS的潜在应用,其中弱BS—用户链路可通过RIS的反射增益进行补偿。
上述研究主要是通过传统凸优化算法来解决RIS的波束赋形问题,而传统凸优化算法求解问题时大多采用交替迭代的方式,求解的结果强烈依赖于初始值,且计算复杂性会因通信的复杂度增加而急速增加,对大规模系统效率较低。受深度强化学习(Deep Reinforcement Learning, DRL)可解决无线通信中具有非凸特性的复杂问题、允许通信实体学习、能够提供自主决策以及对高维数据处理等优点的启发,一些研究者尝试利用DRL来解决无线通信中的一些问题[13-14, 18-20]。文献[13]研究了同构蜂窝网络中干扰信道的信道容量,利用DRL提出了一种分布式动态下行波束赋形协调方法,并根据码本设计了离散化的基站发射波束赋形矩阵。文献[14]研究了基于DRL的多小区非正交多址接入(Non-orthogonal Multiple Access, NOMA)能效优化功率分配问题。文献[18]研究了基于DRL的异构蜂窝网络中用户关联与资源分配。文献[19-20]分别研究了基于DRL的RIS 辅助多用户多输入单输出系统和RIS辅助隐蔽通信系统,并且均利用DRL联合设计基站发射波束赋形与RIS相位偏转矩阵,以提高系统性能。然而,文献[13]虽引入了RIS,但仅研究了基站处的离散发射波束赋形;文献[18]并没有引入RIS这一先进技术;文献[19-20]研究的联合设计均为连续波束赋形。此前的RIS辅助mmWave通信系统中,基于码本的离散波束赋形向量和离散相位的联合设计还未被研究。现阶段,大多数研究还是围绕连续的算法,但使用离散的算法也有其优点,离散算法的复杂度低,且连续相位和离散相位的性能对比也有很重要的意义。
基于上述研究背景,本文研究了在无直视链路的场景下分布式RIS辅助多用户mmWave通信系统,目标是实现最大化加权和速率。本文基于DRL提出两种联合优化方法,一种是基于深度Q网络(Deep Q Network, DQN)算法的离散化发射波束赋形和相位偏转矩阵联合优化方法,另一种是基于双延迟策略梯度(Delayed Deep Deterministic Policy Gradient, TD3)算法的连续发射波束赋形和相位偏转矩阵联合优化方法。本文主要研究工作如下:
1)基于DRL的RIS辅助多用户mmWave通信系统中,采用离散的动作空间,设计了功率码本和相位码本,通过DQN算法设计了发射波束赋形和相位偏转矩阵联合优化算法,实现最大化加权和速率;
2)基于DRL的RIS辅助多用户mmWave通信系统中,采用连续的动作空间,通过TD3算法设计了发射波束赋形和相位偏转矩阵联合优化算法,实现最大化加权和速率;
3)对比分析离散动作空间和连续动作空间的DRL算法的系统和速率、两种算法的复杂度,以及与传统凸优化算法、迫零随机波束赋形算法进行了仿真对比分析。
-
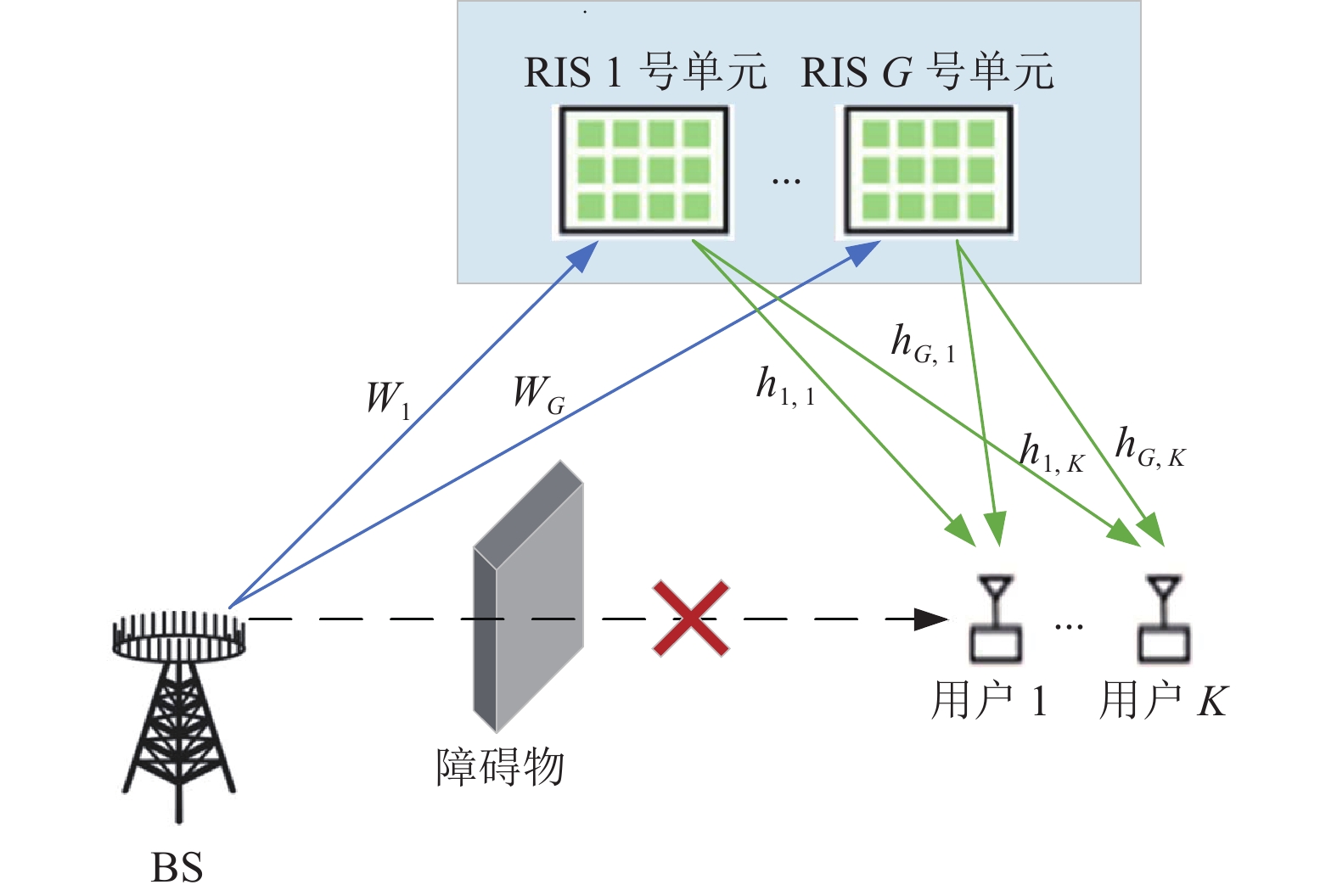
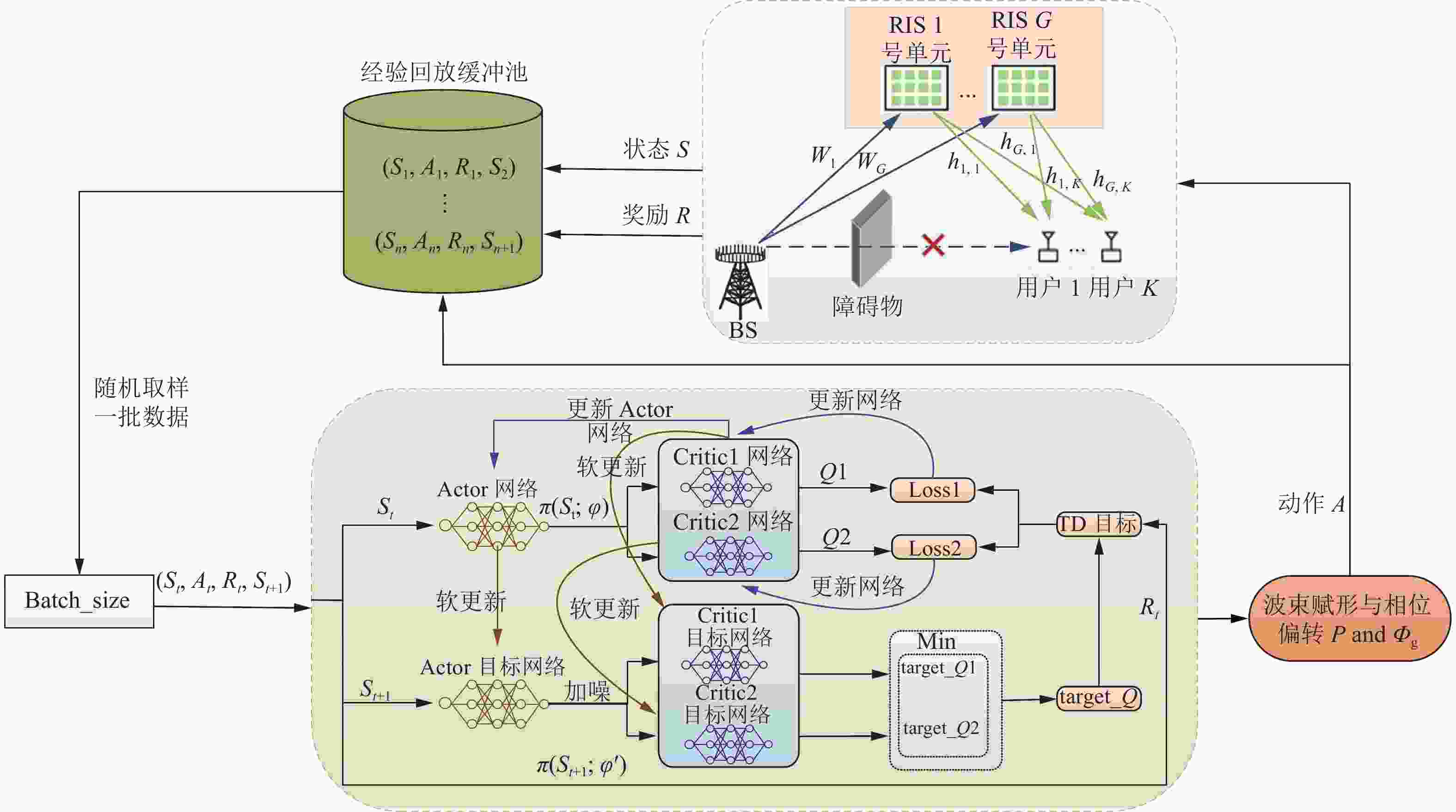
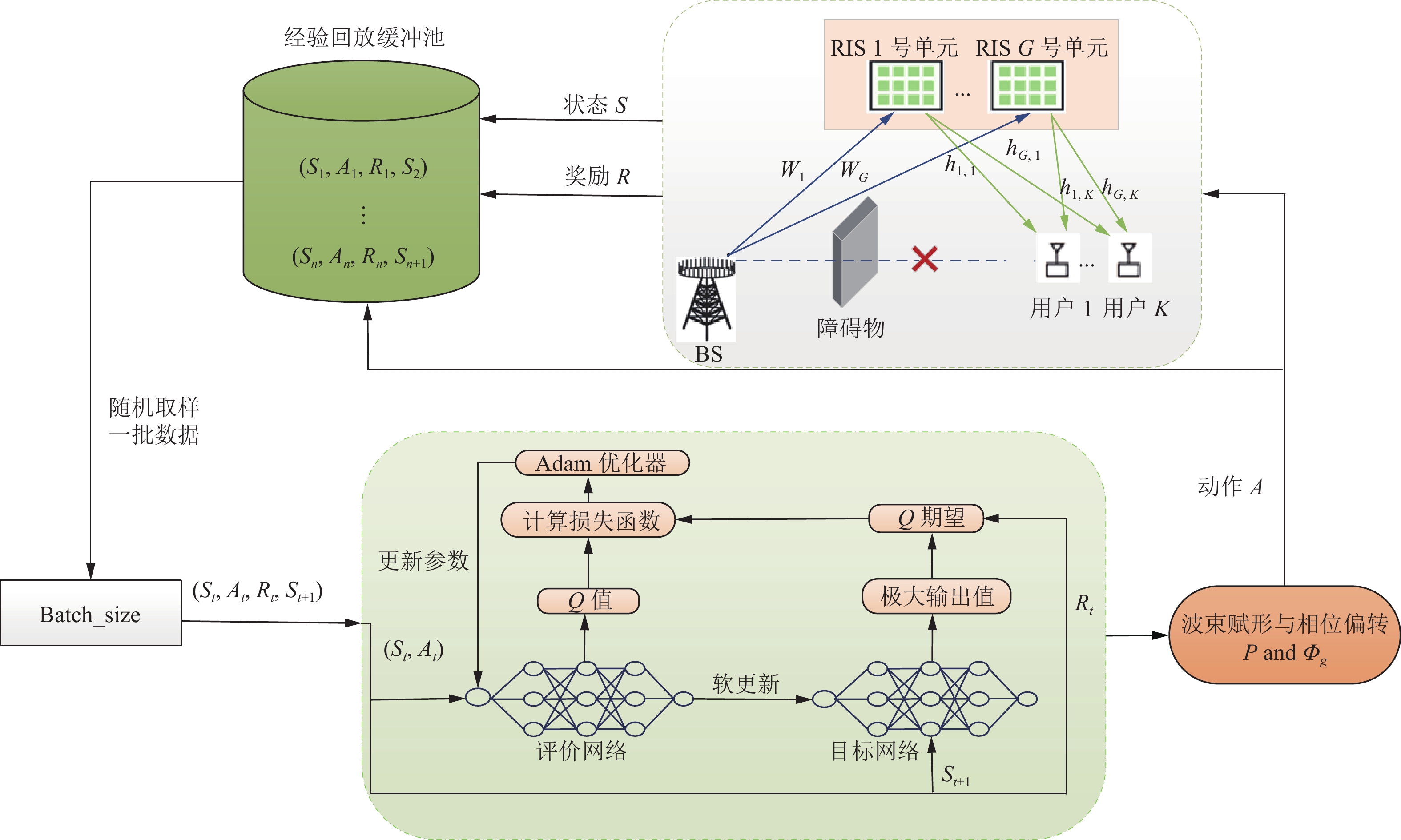
本文研究了图1所示的RIS辅助的多用户mmWave通信系统模型。在RIS—用户的直视链路被障碍物阻塞的情况下,该系统利用RIS的反射功能协助BS与用户之间进行通信。BS配备由
$N$ 个天线组成的均匀线性阵列(Uniform Linear Array, ULA),系统设置$G$ 个RIS单元服务于$K$ 个单天线移动用户。每个RIS单元配备有$M$ 个无源反射元件组成的统一平面阵列(Uniform Planar Array, UPA)。令$M = {M_{{\rm{az}}}} \times {M_{{\rm{el}}}}$ ,其中${M_{{\rm{az}}}}$ 为RIS单元水平方向的元件数,${M_{{\rm{el}}}}$ 为RIS单元垂直方向的元件数。BS的所有天线同时传输$K$ 个数据流,信号首先到达RIS反射面,再被反射面反射到用户。本文假设从BS到第$g$ 个RIS单元的毫米波信道矩阵为${{\boldsymbol{W}}_g} \in {\mathbb{C}^{M \times N}}$ ,第$g$ 个RIS单元到第$k$ 个用户之间的信道矢量为${{\boldsymbol{h}}_{g,k}} \in {\mathbb{C}^{M \times 1}}$ 。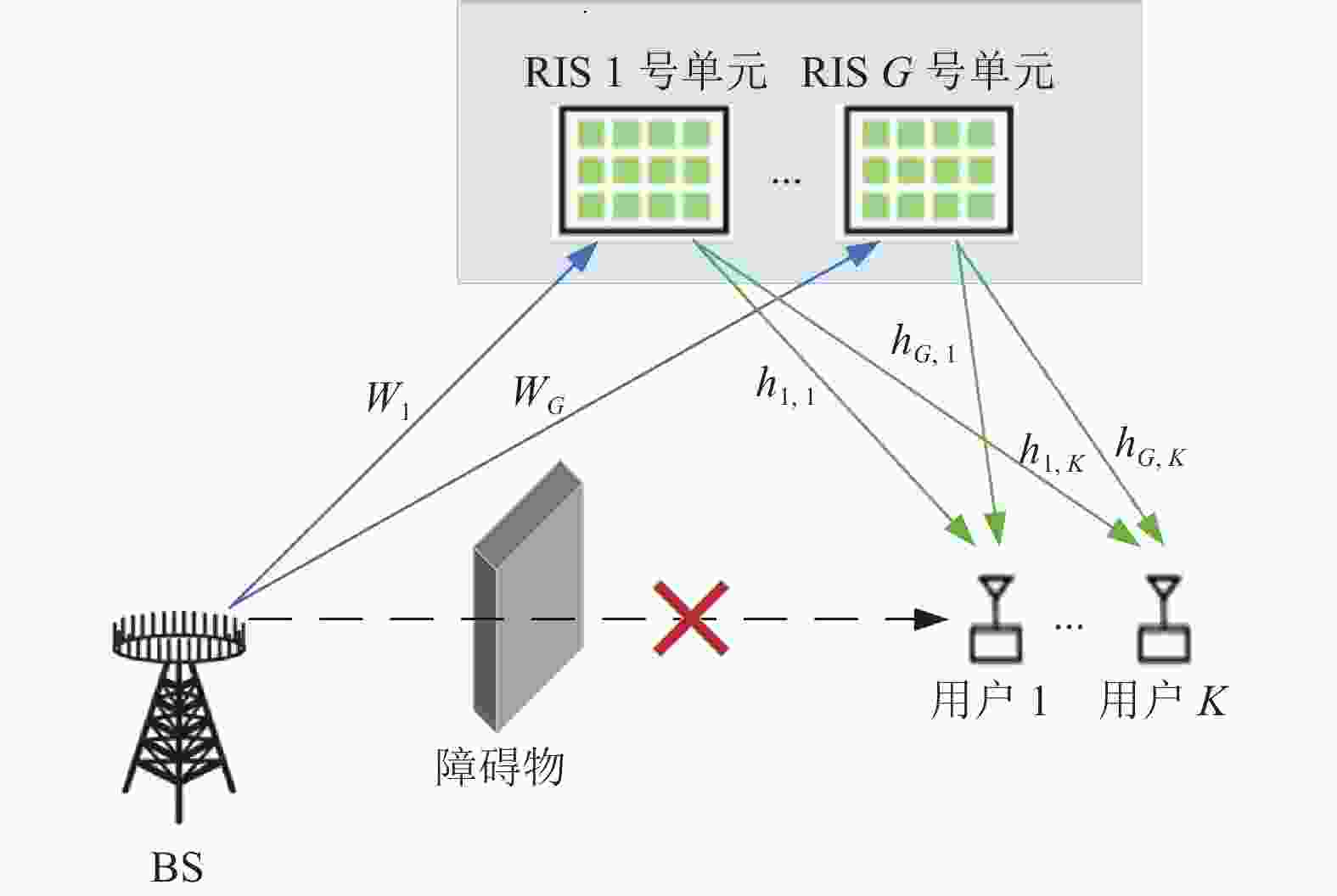
第
$k$ 个用户处的接收信号为:式中,第
$g$ 个RIS单元处的相位偏转矩阵为${{\boldsymbol{\varPhi}} _g} = \sqrt \eta {\bf{diag}}\left( {{{\left[ {{\theta _{g,1}},\cdots ,{\theta _{g,M}}} \right]}^{\rm{H}}}} \right) \in {\mathbb{C}^{M \times M}}$ ;$\eta $ 是反射系数,${\theta _{g,m}} = {{\rm{e}}^{{\rm{j}}{\varphi _{g,m}}}}$ ,${\varphi _{g,m}} \in [0,2{\text{π}} )$ 为RIS元件的相位偏移;${s_k}$ 为BS对第$k$ 个用户的发射信号;${u_k}$ 是方差为$ \sigma _u^2 $ 的循环对称复高斯噪声;${\boldsymbol{P}} = \left[ {{{\boldsymbol{p}}_1},\cdots ,{{\boldsymbol{p}}_k}} \right] \in {\mathbb{C}^{N \times K}}$ 为BS的波束赋形矩阵。为了保持BS的发射功率,添加如下约束条件:
式中,
${P_t}$ 是BS允许的总发射功率。根据广泛应用的三维Saleh-Valenzuela信道模型[21],从BS到第
$g$ 个RIS单元的毫米波信道矩阵${{\boldsymbol{W}}_g}$ 可以表述为:式中,
${N_p}$ 表示非视距(non line of sight, NLoS)路径的数量;$\ell = 0$ 表示视距(line of sight, LoS)路径,${v^{(\ell )}}$ 是第$\ell $ 路径的复增益。${\theta ^{(\ell )}}$ 和${\phi ^{(\ell )}}$ 分别表示二维RIS的仰角和方位角;${{\boldsymbol{\alpha}} _B}(\phi ) = \dfrac{1}{{\sqrt N }}{[{{\rm{e}}^{ - {\rm{j}}\frac{{2{\text{π}} d}}{\lambda }{\phi _i}}}]_{i \in I(N)}}$ ,${{\boldsymbol{\alpha}} _I}(\phi ,\theta ) = {\boldsymbol{\alpha}} _I^{{\rm{az}}}(\phi ) \otimes {\boldsymbol{\alpha}} _I^{{\rm{el}}}(\theta )$ 为ULA和UPA的阵列导向矢量,$\alpha _I^{{\rm{az}}}(\phi ) = \dfrac{1}{{\sqrt N }}{[{{\rm{e}}^{ - {\rm{j}}\frac{{2{\text{π}} d}}{\lambda }{\phi _i}}}]_{i \in I(N)}}$ ,$\alpha _I^{{\rm{el}}}(\theta ) = \dfrac{1}{{\sqrt N }}{[{{\rm{e}}^{ - {\rm{j}}\frac{{2{\text{π}}d}}{\lambda }{\theta _i}}}]_{i \in I(N)}}$ ,$\lambda $ 为载波波长,$d$ 为天线间距,$I(N) = \Bigg\{ n - \dfrac{{N - 1}}{2},n = 0,1,\cdots ,N - 1\Bigg\}$ 。本文假设ULA和UPA的阵元间距都为${\lambda \mathord{\left/ {\vphantom {\lambda 2}} \right. } 2}$ 。通常情况下,由于路径损耗严重,可以忽略两个以上反射的发射功率,只考虑LoS[15]。因此,第
$g$ 个RIS单位与第$k$ 个用户之间的信道为:式中,
${v_k}$ 为信道增益;${\vartheta _r}$ 与${\vartheta _{\text{t}}}$ 分别为接收、发射天线单元增益;${{\boldsymbol{\alpha }}_t}$ 为RIS的阵列导向矢量。本文假设涉及的所有信道状态信息都是完全已知的。 -
本文旨在通过联合优化波束赋形矩阵
$ {\boldsymbol{P}} $ 与相位偏转矩阵${{\boldsymbol{\varPhi }}_g}$ 来最大化所提系统的下行总和速率。则第$k$ 个用户处的干扰信噪比为:因此,本系统的最大和速率问题可以表示为:
式中,
${\omega _k}$ 为第$k$ 个用户数据的权重;$ {P_t} $ 为BS所允许的最大发射功率。式(6.1)为通信施加的功率约束;式(6.2)为对RIS施加的相位约束,连续相位集合为${\mathcal{F}_c} = \left\{ {{\theta _{g,m}} = {{\rm{e}}^{{\rm{j}}{\varphi _{g,m}}}}\left| {{\varphi _{g,m}} \in [0,2{\text{π}} )} \right.} \right\}$ ,离散相位集合为${\mathcal{F}_c} = \left\{ {{\theta _{g,m}} = {{\rm{e}}^{{\rm{j}}{\varphi _{g,m}}}}\left| {{\varphi _{g,m}} \in \left\{ {\dfrac{{2{\text{π}} i}}{{{2^B}}}} \right\}_{i = 0}^{{2^B} - 1}} \right.} \right\}$ ,B是以bit数表示的相位分辨率。 -
DRL是指智能体通过“试错”的方式与环境进行交互学习,并自动调整策略以找到最佳动作,达到最优性能的学习过程[22]。以下是一些用于完整描述DRL学习过程的基本元素:状态、动作、奖励、策略和价值函数。
1) 状态:令
$\mathcal{S}$ 表示所有可能存在状态的集合,则${S_t} \in \mathcal{S}$ 表示t时刻观测到的状态;2) 动作:令
$\mathcal{A}$ 表示所有可能动作的集合,则${A_t} \in \mathcal{A}$ 表示t时刻得到的动作;3) 奖励:奖励
${R_t}$ 反映了智能体从当前状态${S_t}$ 转移到下一个状态${S_{t + 1}}$ 后行为表现的好坏。智能体的目标是最大化回报${G_t} = \displaystyle\sum\limits_{\tau = 0}^\infty {{\gamma ^\tau }{R_{t + \tau + 1}}}$ ,$\gamma \in (0,1]$ 为奖励的折扣率;4) 策略:策略
${\text{π}} (a|s) = \mathbb{P}({A_t} = a|{S_t} = s)$ 表示在输入状态为$s$ 的情况下采取动作$a$ 的概率;5) 价值函数:价值函数
$Q(s,a) = {\mathbb{E}_\pi }[{G_t}|{S_t} = s,{A_t} = a]$ 是对未来奖励的预测,用于评估动作选择对于学习过程获得的预期未来累积折扣奖励的影响。Q函数满足贝尔曼期望方程[19]:因此,满足最优策略
$ {\pi }^{*} $ 的最优Q函数表达式为:Q函数的更新[23]为:
式中,
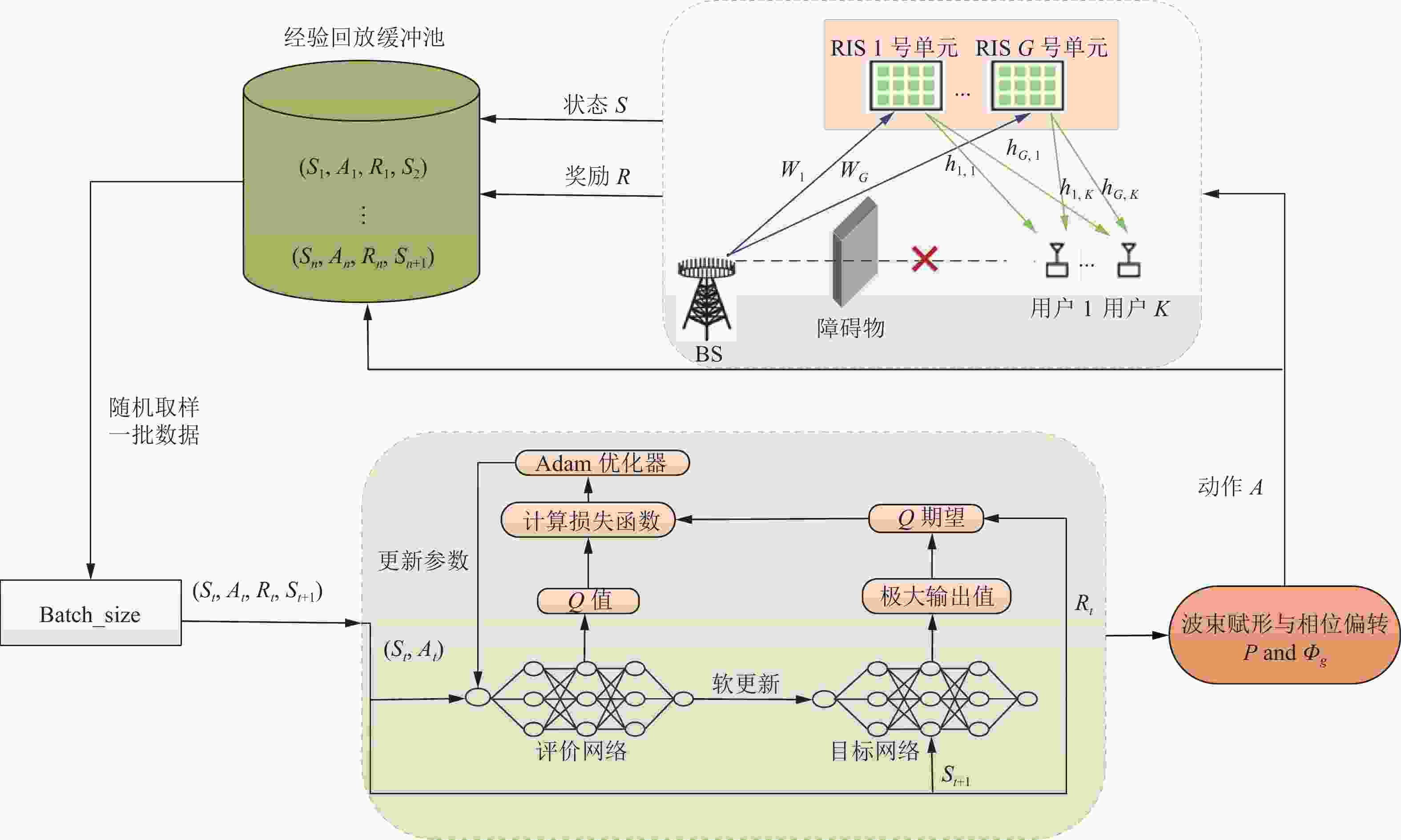
$\mu \in (0,1]$ 为训练网络的学习率,用于更新Q函数。$ {R_{t + 1}} + \gamma \mathop {\max }\limits_{{A'} \in \mathcal{A}} {Q^*}({S_{t + 1}},{A^\prime }) $ 为时序差分(temporal-difference, TD)目标,$ {Q^*}({S_t},{A_t}) $ 要向TD目标靠近。在off-policy的DRL算法中,将训练过程中产生的每一步四元组数据$({S_t},{A_t},{R_t},{S_{t + 1}})$ 存放到经验回放缓冲池$\mathcal{M}$ 中,训练网络时每次从$\mathcal{M}$ 中随机采样一批数据进行训练。 -
DQN算法的最终更新目标是让
$ {Q^*}({S_t},{A_t}) $ 逼近TD目标。对于一组数据$({S_t},{A_t},{R_t},{S_{t + 1}})$ ,Q网络的损失函数为:式中,
$\theta $ 与${\theta ^\prime }$ 分别为评价网络和目标网络的参数。评价网络用来计算原来的损失函数中的${Q_\theta }({S_t},{A_t})$ 项。目标网络用来计算原来的损失函数中的${Q_{{\theta ^\prime }}}({S_{t + 1}},{A^\prime })$ 项。为了让更新目标更稳定,目标网络会使用评价网络的一套比较旧的参数。评价网络在训练中实时更新,而目标网络的参数按照预定的频率与评价网络同步一次,即${\theta ^\prime } \leftarrow \theta $ 。 -
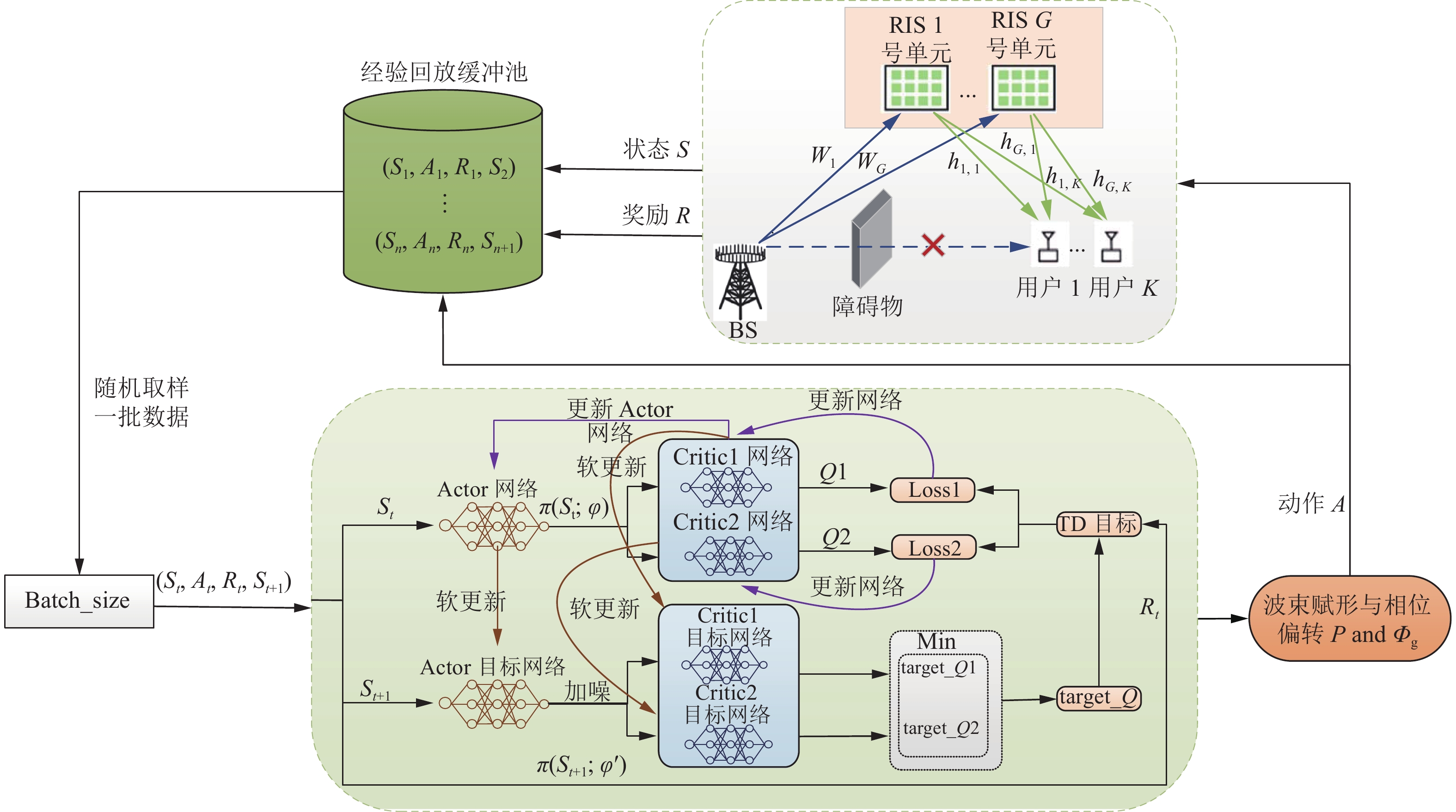
TD3算法中每个Actor网络都伴有两套Critic网络用于估算Q值,并取相对较小的值作为更新目标,其目的是缓解自举和最大化造成的高估。Critic网络的TD目标为:
式中,
${Q_{\theta _1^\prime }}$ 与${Q_{\theta _2^\prime }}$ 分别为两个目标评价网络,$\theta _1^\prime $ 与$\theta _2^\prime $ 分别为对应目标网络的参数;${\pi _{{\varphi ^\prime }}}$ 为目标策略网络;${\varphi ^\prime }$ 为网络参数。为了使得预估更加准确,网络更具有健壮性,本文在计算${Q_{{\text{target}}}}$ 时,为目标策略网络输出的动作添加一个Ornstein-Uhlenbeck(OU)噪声,则式(11)可变换为:式中,
$\varepsilon $ 为OU噪声。因此,Critic网络的更新[24]为:式中,
$\alpha $ 为更新训练Critic网络的学习率;${\delta _{i.t}}$ 为TD误差;${Q_{i,t}}$ 为Critic网络做的预测。此外,为了解决值函数与策略耦合问题,TD3算法还采用延迟更新,确保TD误差足够小。Actor网络的更新[24]为:式中,
$\; \beta $ 为更新训练Actor网络的学习率。在降低频率更新的同时,使用软更新[24]:式中,
$\tau $ 为更新目标评价网络和目标策略网络的学习率。 -
本节主要介绍两种联合设计算法,一种是在离散动作空间中,利用图2所示的DQN神经网络结构,设计了功率码本与相位码本,提出了用DQN算法进行联合优化发射波束赋形与RIS相位偏转矩阵;另一种是在连续动作空间中,利用图3所示的TD3神经网络结构,采用TD3算法进行联合优化发射波束赋形与RIS相位偏转矩阵。
-
本小节利用DQN算法处理离散动作空间问题,最大化加权和速率。DQN算法中网络均为四层前馈神经网络。在评价网络的输出层放置一个归一化过程,以满足功率约束条件。DQN的关键组件定义如下。
1) 状态:当前t时刻的状态
${S_t}$ 包含所有用户的信道信息${\boldsymbol{W}}_g^{(t)},{\boldsymbol{h}}_{g,k}^{(t)},\forall g,k$ ,以及t−1时刻的动作${\boldsymbol{\Phi}} _g^{(t - 1)},{\boldsymbol{p}}_k^{(t - 1)},\forall g,k$ 。因此,${S_t}$ 可定义为:${S_t} = [{\boldsymbol{W}}_g^{(t)}, {\boldsymbol{h}}_{g,k}^{(t)},{\boldsymbol{\Phi}} _g^{(t - 1)},{\boldsymbol{p}}_k^{(t - 1)}]^{\rm{T}},\forall g,k$ 。2) 动作:当前t时刻的动作
${A_t}$ 包括发射波束赋形${\boldsymbol{p}}_k^{(t)}$ 和RIS相位偏转${\boldsymbol{\varPhi }}_g^{(t)}$ ,则${A_t}$ 可定义为:${A_t} = {[{\boldsymbol{\varPhi}} _g^{(t)},{\boldsymbol{p}}_k^{(t)}]^{\rm{T}}},\forall g,k$ 。而DQN处理的动作为离散的,因此将动作进行离散化处理。对于${\boldsymbol{p}}_k^{(t)}$ ,首先将其拆分为两部分:式中,
$\sqrt {q_g^{(t)}} = {\left\| {{\boldsymbol{p}}_k^{(t)}} \right\|^2}$ 代表BS在t时刻的发射功率,且满足$0 \leqslant q_g^{(t)} \leqslant {P_t}$ ;$\tilde {\boldsymbol{p}}_k^{(t)}$ 代表发射波束的方向,$\tilde {\boldsymbol{p}}_k^{(t)} \in [0,2{\text{π}})$ 。将BS的可用发射功率电平在0~${P_t}$ 间均匀取${q_{{\rm{pow}}}}$ 个值,并将所选功率电平集合定义为功率集$\mathcal{P} = \left\{ 0,\dfrac{1}{{{q_{{\rm{pow}}}} - 1}}{P_t},\dfrac{2}{{{q_{{\rm{pow}}}} - 1}}{P_t},\cdots,{P_t}\right\}$ 。此外,定义一个由${q_{{\rm{code}}}}$ 个码向量${{\boldsymbol{c}}_q} \in {\mathbb{C}^{N \times 1}}$ 组成的并覆盖$\tilde {\boldsymbol{p}}_k^{(t)}$ 在$[0,2{\text{π}} )$ 上任意方向的码本${\boldsymbol{\mathcal{C}}}$ ,其中$q \in \{ 0,1,\cdots, {q_{{\rm{pow}}}} - 1\}$ 。令码本矩阵为${\boldsymbol{\mathcal{C}}} = [{{\boldsymbol{c}}_0},{{\boldsymbol{c}}_1},\cdots,{{\boldsymbol{c}}_{{q_{{\rm{code}}}} - 1}}] \in {\mathbb{C}^{N \times {q_{{\rm{code}}}}}}$ ,${\boldsymbol{\mathcal{C}}}$ 中的每一列代表波束的一个方向。本文采用了文献[25]中的码本矩阵。用$ \mathcal{C}[n,q] $ 代表第$q$ 个码中的第$n$ 个天线元素的相位偏转,$\mathcal{C}[n,q] = \dfrac{1}{{\sqrt N }}\exp \left( {{\rm{j}}\dfrac{{2{\text{π}}}}{S}\left\lfloor {\dfrac{{n\text{mod} \left( {q + \dfrac{{{q_{{\rm{code}}}}}}{2},{q_{{\rm{code}}}}} \right)}}{{{{{q_{{\rm{code}}}}} \mathord{\left/ {\vphantom {{{q_{{\rm{code}}}}} S}} \right. } S}}}} \right\rfloor } \right)$ ,其中,$S$ 代表每个天线元件的可用相位值的数量。因此,BS可以分别从功率集$\mathcal{P}$ 与码本${\boldsymbol{\mathcal{C}}}$ 中选取$q_g^{(t)}$ 与${{\boldsymbol{c}}^{(t)}}$ 来确定其波束赋形矩阵。3) 奖励:在t时刻,通过给定的瞬时信道信息
${\boldsymbol{W}}_g^{(t)},{\boldsymbol{h}}_{g,k}^{(t)},\forall g,k$ 以及从评价网络得到的动作${\boldsymbol{\varPhi}} _g^{(t)},{\boldsymbol{p}}_k^{(t)}$ 可确定奖励,奖励设置为系统的和速率。DQN优化算法见算法1。
算法1:离散化发射波束赋形与RIS相位偏转联合设计算法
输入:
${\boldsymbol{W}}_g^{(t)},{\boldsymbol{h}}_{g,k}^{(t)},\forall g,k$ 输出:最优动作
$A = \{ {{\boldsymbol{\varPhi}} _g},{\boldsymbol{P}}\}$ ,Q值函数初始化:回合数E,每回合时隙T,目标网络参数
${\theta ^\prime }$ ,评价网络参数$\theta $ ,经验回放缓冲池M,发射波束赋形矩阵P,相位偏转矩阵${{\boldsymbol{\varPhi}} _g}$ for
$i = 0,1,\cdots ,E - 1$ do收集初始状态
${S_0} = \{ {{\boldsymbol{W}}_g},{{\boldsymbol{h}}_{g,k}}\} ,\forall g,k$ for
$j = 0,1,\cdots ,T - 1$ do根据
$ \varepsilon - $ 贪婪策略选择动作${A_t}$ ;与环境交互得到
${A_t}$ 对应的奖励${R_t}$ ,并得到下一时刻的状态${S_{t + 1}}$ ;将
${S_t}$ 、${A_t}$ 、${R_t}$ 和${S_{t + 1}}$ 放入回放缓冲池M中;从M中随机抽取一批数据
$\{ {S_t},{A_t},{R_t},{S_{t + 1}}\} $ ;根据式(10)计算损失函数;
利用损失函数梯度更新评价网络参数
$\theta $ ;每隔
${T_{{\rm{step}}}}$ 步,更新一次目标网络参数${\theta ^\prime }$ ;更新状态,将神经网络的输入设置为
${S_{t + 1}}$ 。end
end
DQN算法的网络参数设置见表1。
参数 描述 值 $\gamma $ 对未来奖励的折扣率 0.6 $\mu $ 网络的学习率 0.00005 ${\rm{batch} }\_{\rm{size} }$ 批处理数据的大小 32 ${T_{{\rm{step}}} }$ 目标网络延迟同步更新的步数 100 $\mathcal{M}$ 经验回放缓冲池的大小 50000 $E$ 回合数 1000 $T$ 每回合的步数 10000 -
本小节利用TD3算法处理连续动作空间问题,最大化加权和速率。TD3算法中Actor网络与Critic网络都是四层前馈神经网络。为满足功率约束条件,在隐藏层和Actor网络的输出层放置归一化过程。TD3的关键组件定义如下:
1) 状态:TD3算法中的状态组成与DQN算法相似,不同之处在于t−1时刻的动作为连续值,
${S_t} = {[{\boldsymbol{W}}_g^{(t)},{\boldsymbol{h}}_{g,k}^{(t)},{\boldsymbol{\varPhi}} _g^{(t - 1)},{\boldsymbol{p}}_k^{(t - 1)}]^{\rm{T}}},\forall g,k$ 。2) 动作:TD3算法也将发射波束赋形与相位偏转作为策略网络的输出。智能体通过强化学习选择动作
${A_t} = {[{\boldsymbol{\varPhi}} _g^{(t)},{\boldsymbol{p}}_k^{(t)}]^{\rm{T}}},\forall g,k$ 。3) 奖励:与DQN算法奖励计算方式相同,以和速率作为奖励。
TD3优化算法见算法2。
算法2:连续发射波束赋形与RIS相位偏转联合设计算法
输入:
${\boldsymbol{W}}_g^{(t)},{\boldsymbol{h}}_{g,k}^{(t)},\forall g,k$ 输出:最优动作
$A = \{ {{\boldsymbol{\varPhi}} _g},{\boldsymbol{P}}\}$ ,Q值函数初始化:回合数
$E$ ,每回合时隙$T$ ,策略网络参数$\varphi $ ,目标策略网络参数${\varphi ^\prime }$ ,两个评价网络参数${\theta _1}$ 与${\theta _2}$ ,两个目标评价网络参数$\theta _1^\prime $ 与$\theta _2^\prime $ ,经验回放缓冲池$\mathcal{M}$ ,发射波束赋形矩阵${\boldsymbol{P}}$ ,相位偏转矩阵${{\boldsymbol{\varPhi}} _g}$ for
$i = 0,1,\cdots ,E - 1$ do$n = 0$ ;收集初始状态
${S_0} = \{ {{\boldsymbol{W}}_g},{{\boldsymbol{h}}_{g,k}}\} ,\forall g,k$ ;for
$j = 0,1,\cdots ,T - 1$ do以
${S_t}$ 作为输入,策略网络输出相应动作${A_t}$ ;与环境交互得到
${A_t}$ 对应的奖励${R_t}$ ,并得到下一时刻的状态${S_{t + 1}}$ ;将
${S_t}$ 、${A_t}$ 、${R_t}$ 和${S_{t + 1}}$ 放入回放缓冲池$\mathcal{M}$ 中;从
$\mathcal{M}$ 中随机抽取一批数据$\{ {S_t},{A_t},{R_t},{S_{t + 1}}\} $ ;$n = n + 1$ ;得到两个评价网络输出
${Q_{{\theta _1}}}$ 、${Q_{{\theta _2}}}$ ;根据式(12)计算得到
${Q_{{\text{target}}}}$ ;根据式(13)、式(14)与式(15)更新评价网络;
if
$n$ %${T_{{\rm{step}}}}$ == 0 then根据式(16)更新策略网络;
根据式(17)、(18)更新
${\varphi ^\prime }$ 、$\theta _1^\prime $ 与$\theta _2^\prime $ ;end if
更新状态,将神经网络的输入设置为
${S_{t + 1}}$ ;end
end
TD3算法的网络参数设置见表2。
参数 描述 值 $\gamma $ 对未来奖励的折扣率 0.99 $\alpha $ 更新训练评价网络的学习率 0.001 $\; \beta$ 更新训练策略网络的学习率 0.0001 $\tau $ 更新目标策略网络与目标价值网络的学习率 0.001 $\lambda $ 训练评价网络和训练策略网络的衰减率 0.00001 ${\rm{batch}}\_{\rm{size}}$ 批处理数据的大小 16 $\mathcal{M}$ 经验回放缓冲池的大小 100000 ${T_{{\rm{step}}} }$ 策略网络延迟更新的步数 4 $E$ 回合数 1000 $T$ 每回合的步数 10000 -
信道增益设置为
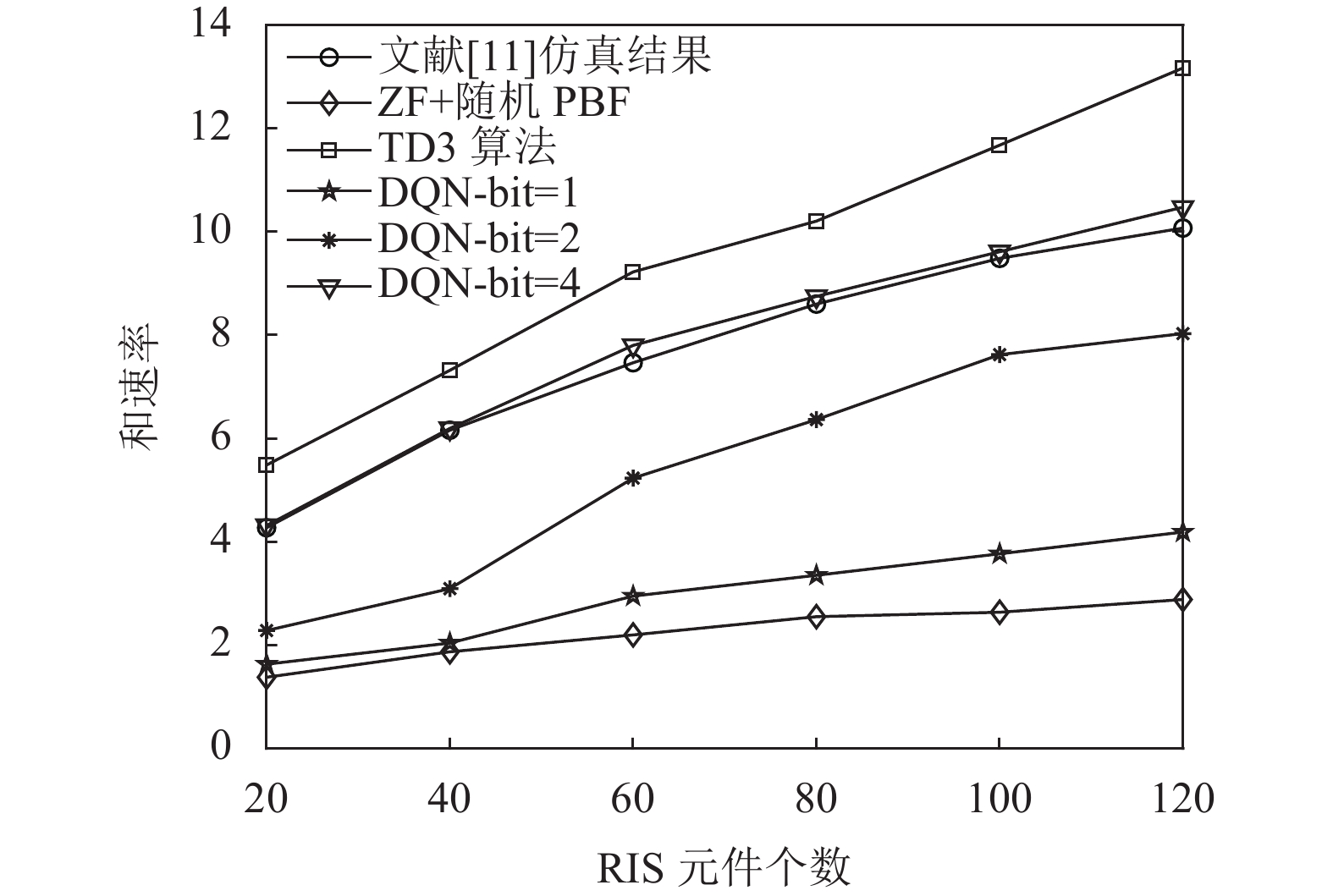
${v_k} \sim \mathcal{C}\mathcal{N}(0,{10^{ - 0.1PL(r)}})$ [17, 26],其中$PL(r) = {\vartheta _a} + 10{\vartheta _b}\lg (r) + \xi $ ,$\xi \sim \mathcal{N}{(0,\sigma _\xi ^2)^3}$ 。通过设置参数$\sigma _u^2 = - 85\;{\rm{dBm}}$ ,${\vartheta _t} = 9.82\;{\rm{dBi}}$ ,${\vartheta _r} = 0\;{\rm{dBi }}$ ,${\vartheta _a} = 61.4$ ,${\vartheta _b} = 2$ 以及${\sigma _\xi } = 5.8\;{\rm{dB}}$ 来实现信道。建立一个二维坐标平面,位于原点位置的BS具有$N = 20$ 根天线,用户均匀随机分布在以$(40\;{\rm{m}},0\;{\rm{m}})$ 为中心,$10\;{\rm{m}}$ 为半径的圆中。设置$G = 2$ 个RIS单元,坐标位置分别为$(40\;{\rm{m}},30\;{\rm{m}})$ 和$(30\;{\rm{m}},40\;{\rm{m}})$ 。除非另有说明,否则本文总发射功率设置为${P_t} = 30\;{\rm{dBm}}$ [17]。本文将文献[11]所提算法与迫零(zero forcing, ZF)+随机PBF算法设为基准算法。图4展示了不同算法中和速率与RIS元件个数的关系,将本文所提算法与两种基准算法进行对比分析。从图中可以看到随着RIS元件个数的增加,每个算法的和速率均在增长,且本文提出的方法均优于迫零波束赋形随机相位偏转算法。在基于DQN离散化联合优化的算法中,和速率随着
${\rm{bit}}$ 的增大而逐渐增长。当${\rm{bit}} = 1$ 时,和速率略高于迫零波束赋形随机相位偏转算法,且在$M = 120$ 处,和速率高出迫零波束赋形随机相位偏转算法45.3%;当${\rm{bit}} = 2$ 时,和速率增益相较于${\rm{bit}} = 1$ 的情况更为显著;当${\rm{bit}} = 4$ 时,仿真结果已经可以达到甚至超过文献[11]的效果,且在$M = 60$ 处,和速率性能高出文献[11]所提方法4.5%。仿真时${\rm{bit}}$ 取1、2、4这3种情况,因为${\rm{bit}}$ 越往后增大,和速率差距越来越小,根据功率损耗[25-26] 计算公式$1 / \left( 2^B/ {\text{π}} \sin \left( 2^B/{\text{π}} \right) \right)^2$ 可以计算2-${\rm{bit}}$ 与4-${\rm{bit}}$ 场景下功率损耗分别为0.9 dB与0.03 dB,当${\rm{bit}}$ 无穷大时,功率损耗为0 dB;当${\rm{bit}}$ 增加时,系统的反馈链路的开销也会增大。综合上述因素,${\rm{bit}}$ 可以选择为4。基于DQN的方法处理离散动作,其和速率性能差于连续动作的方法。从仿真图4可以发现本文提出的基于TD3连续联合优化的方法得到的效果最好,性能最优,且在$M = 120$ 处,和速率高出文献[11]仿真结果30.7%。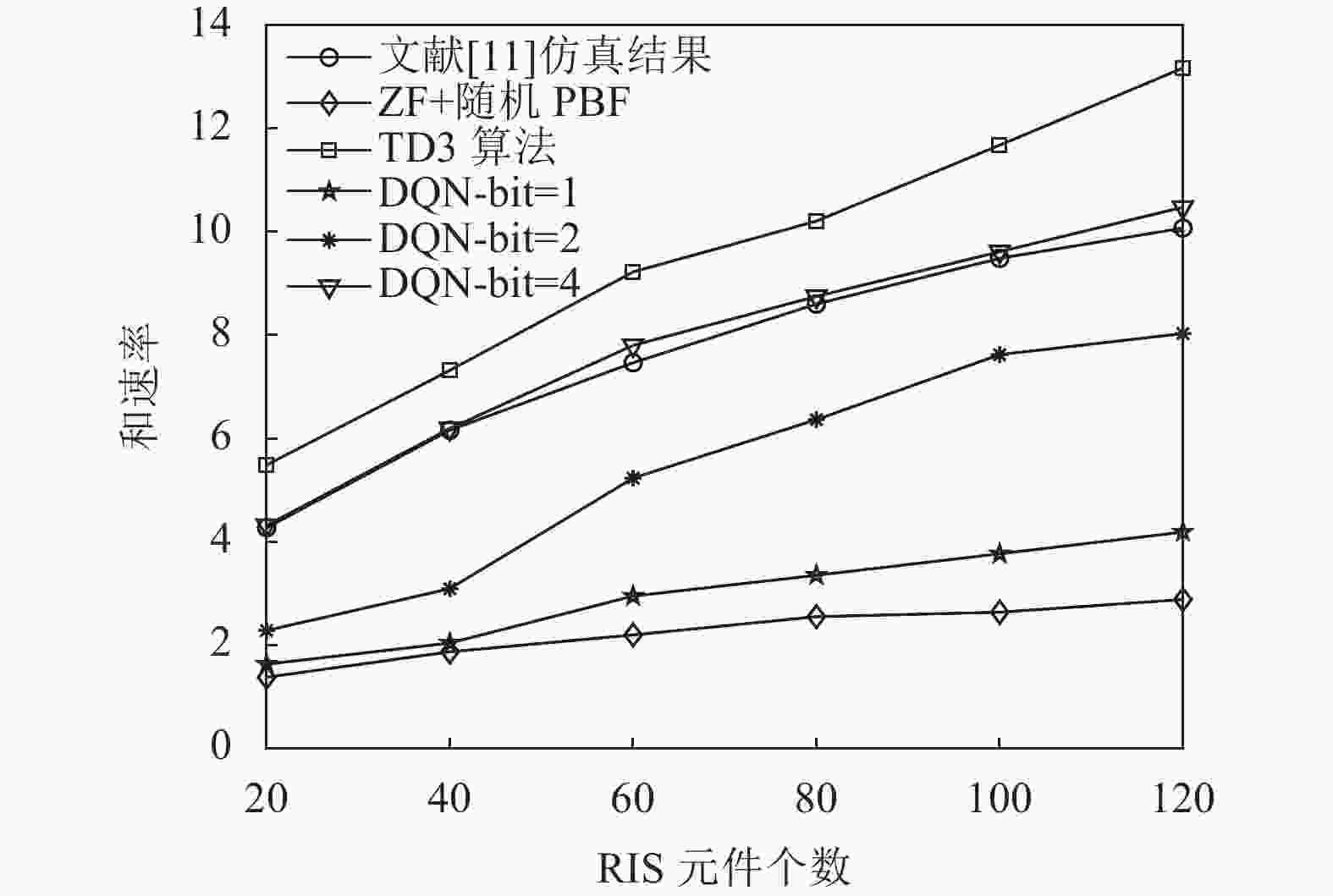
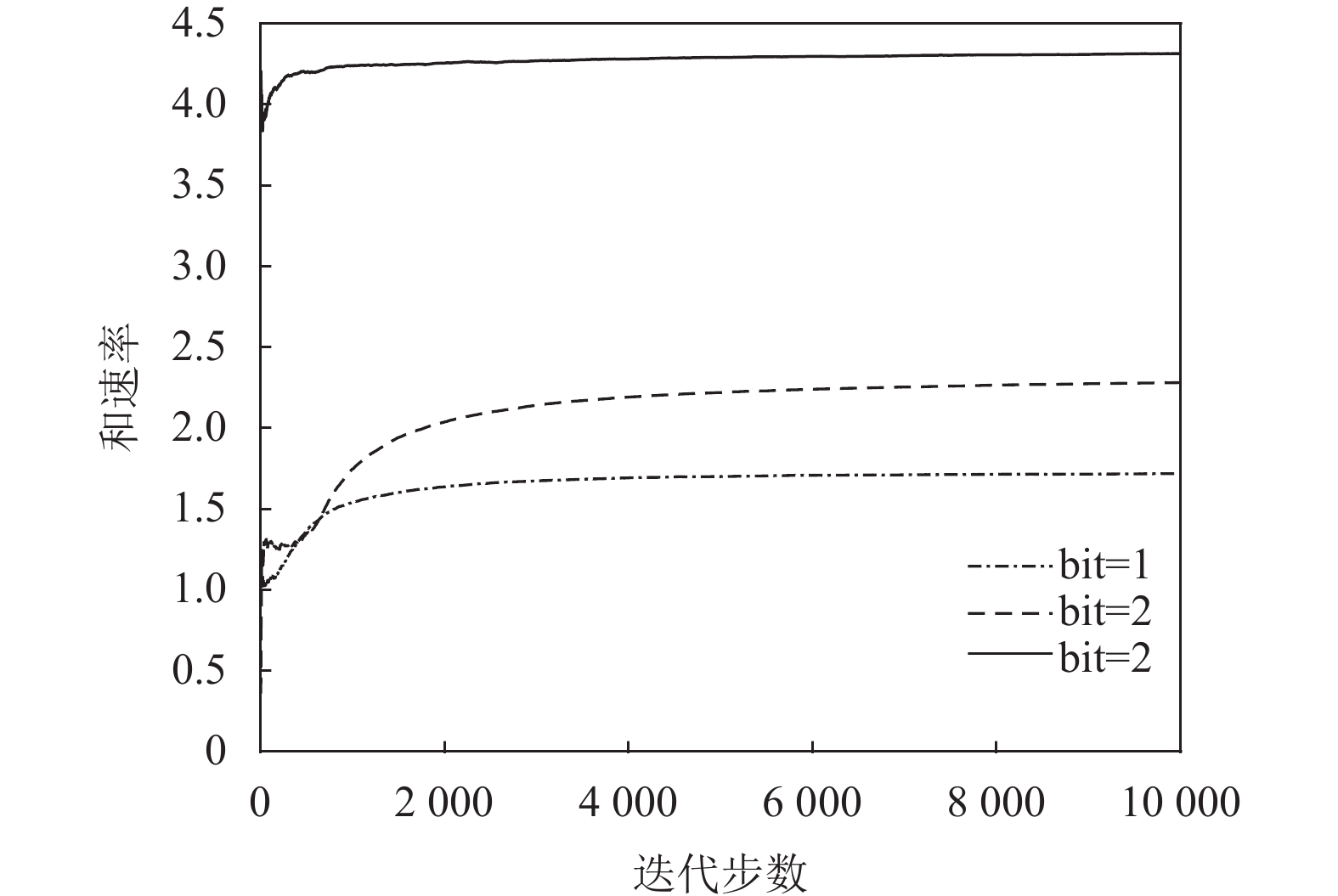
图5展示了在DQN算法下,改变码本比特数目对系统性能的影响。从图中可以看到,随着比特数目的增大,系统性能也在逐渐提高,并且当
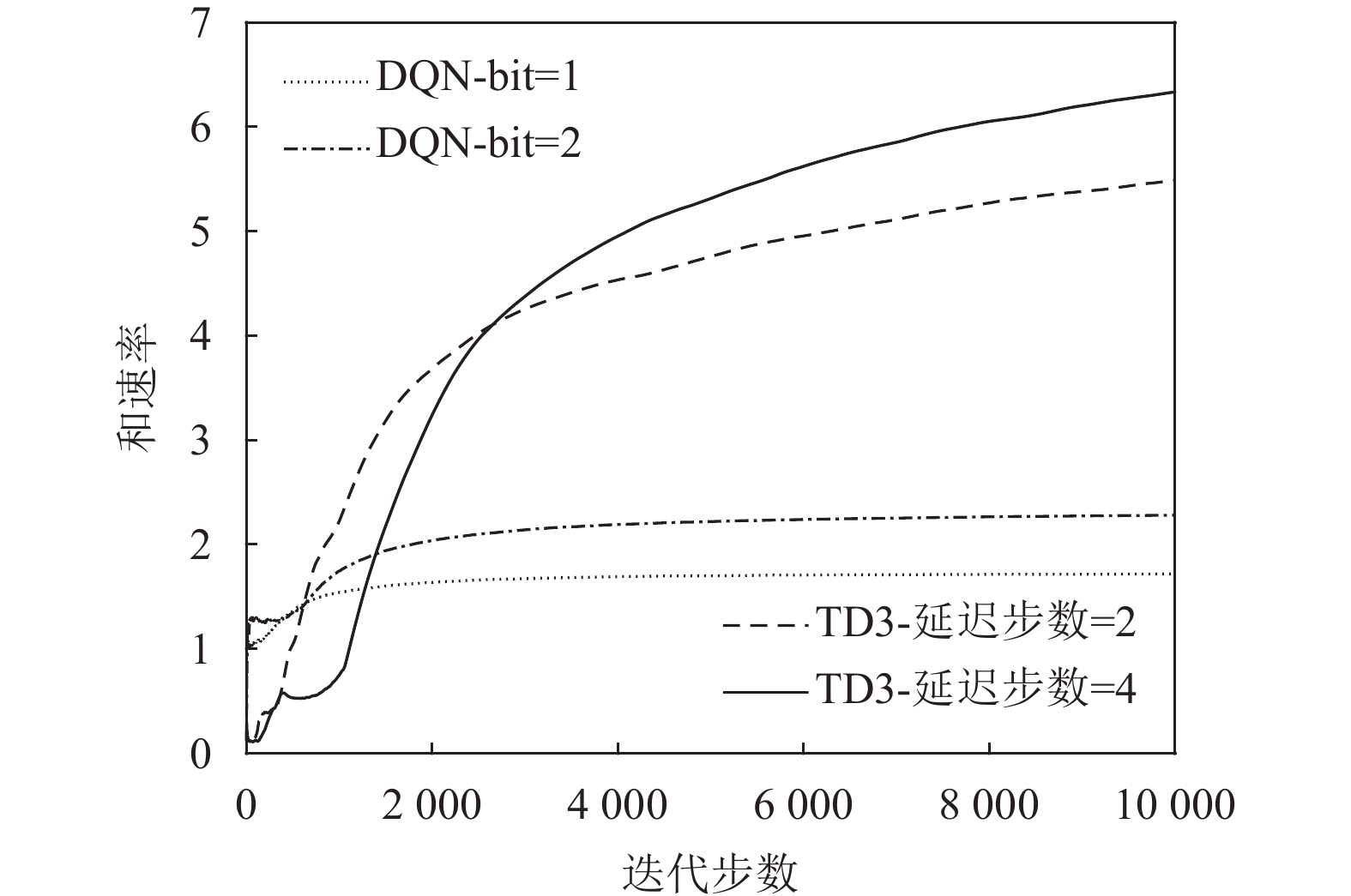
${\rm{bit }}= 4$ 时算法收敛最快。图6展示了在相同用户个数和RIS元件个数的条件下DQN与TD3算法分别对系统性能的影响。从图6中可以看出基于DQN算法的系统在收敛速度上高于基于TD3算法的系统,但从整体系统性能来看,基于TD3算法的系统性能高于基于DQN算法的系统性能。除去TD3算法处理连续动作空间,而DQN算法处理离散动作空间这一点,TD3算法使用了4个Critic网络,并选取最小Q值作为目标值,缓解自举和最大化造成的高估,使得系统更加稳定。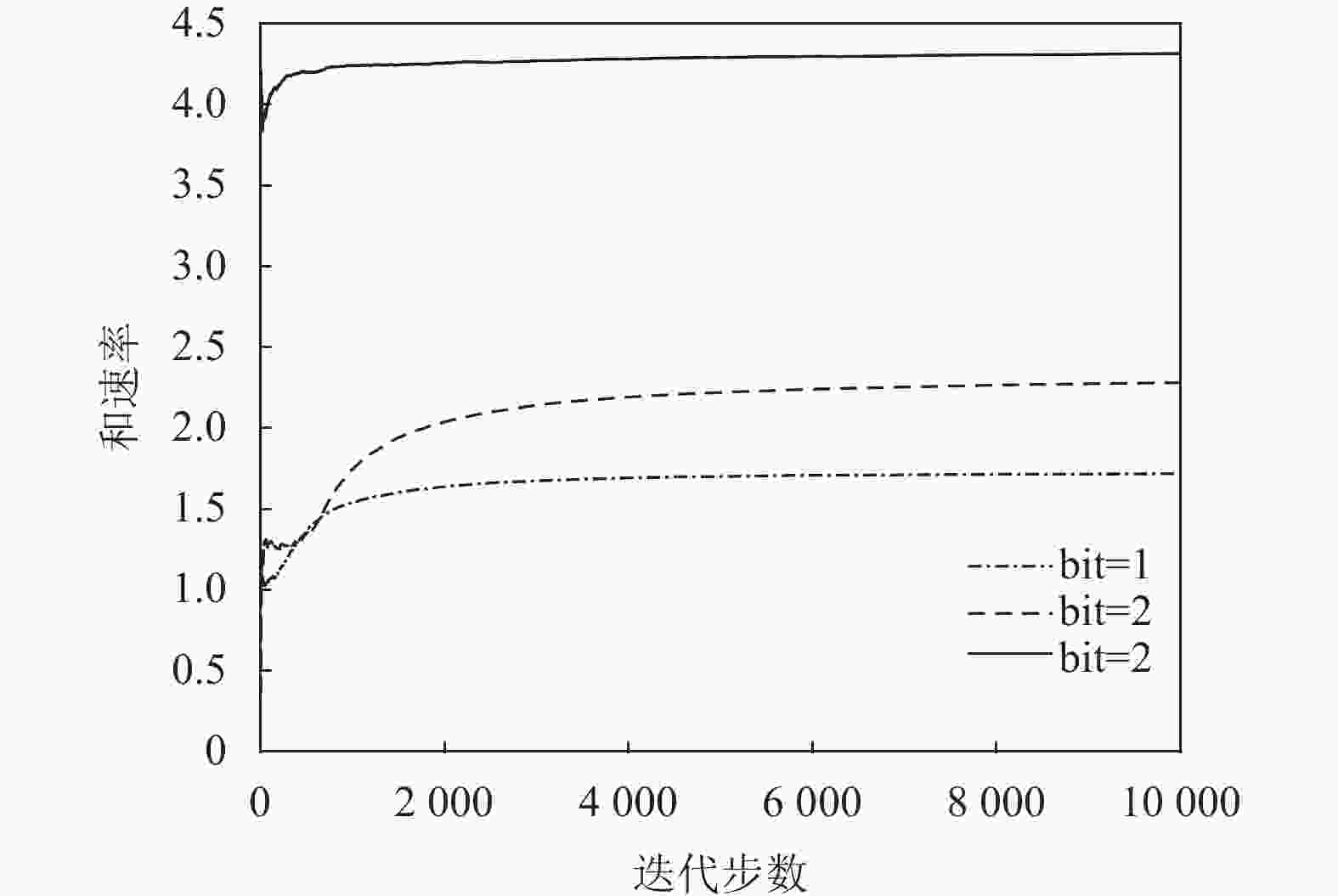
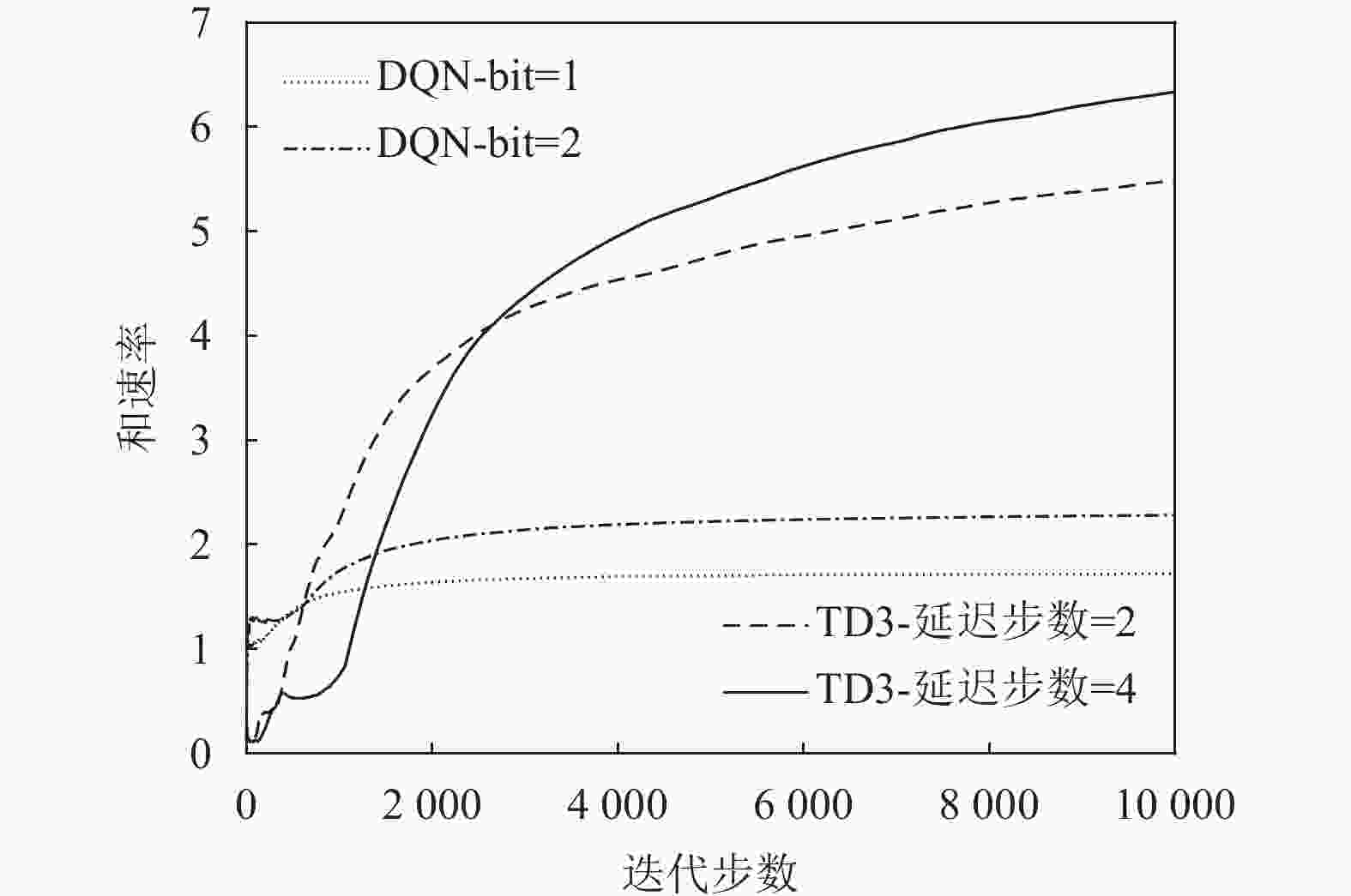
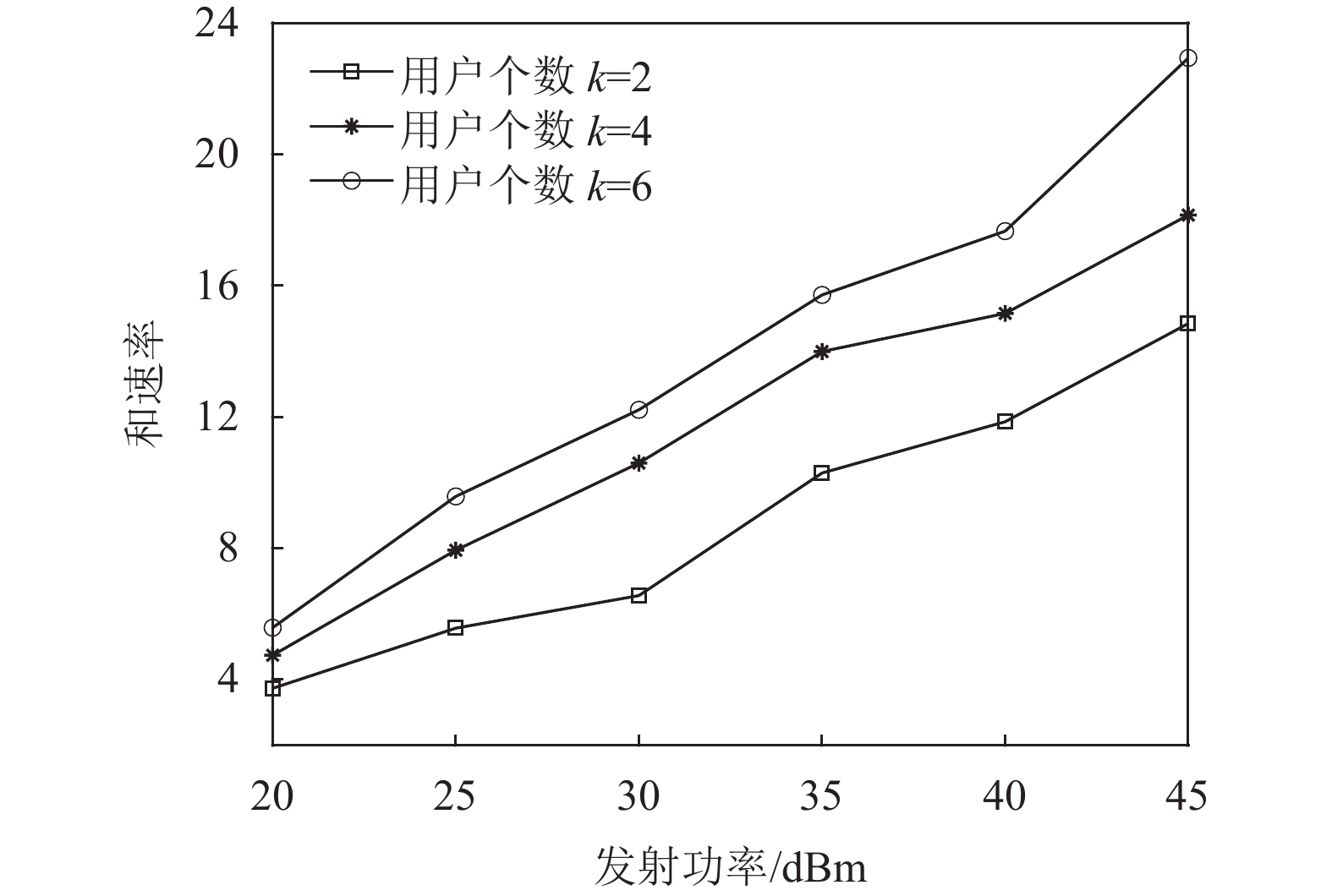
图7评估了本文所提TD3算法在不同用户个数的条件下发射功率与和速率的关系,随着发射功率从20 dBm增长到45 dBm,所有多用户的情况都呈现出上升趋势。随着用户数量的增加,在相同发射功率的条件下得到的和速率也会增加。
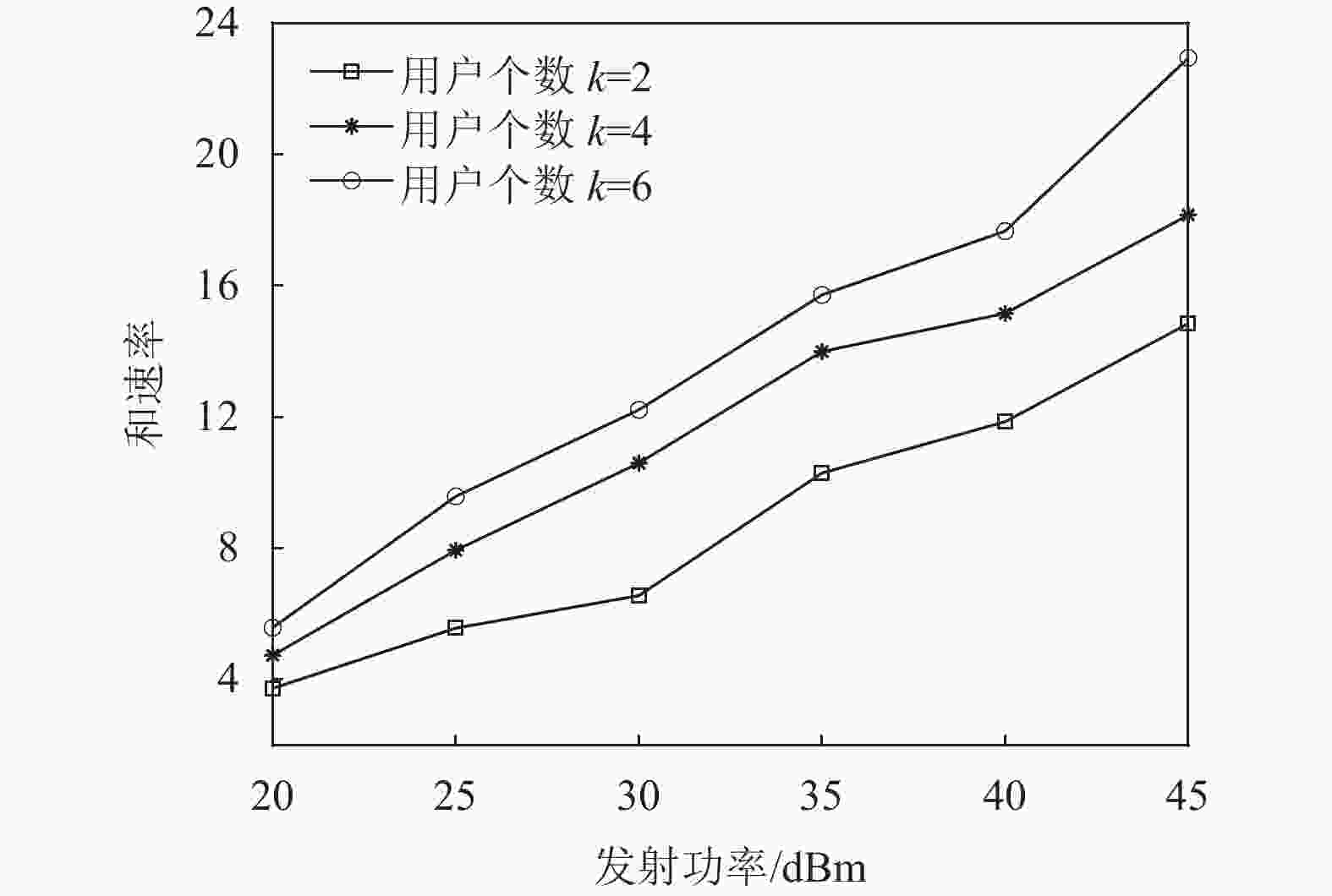
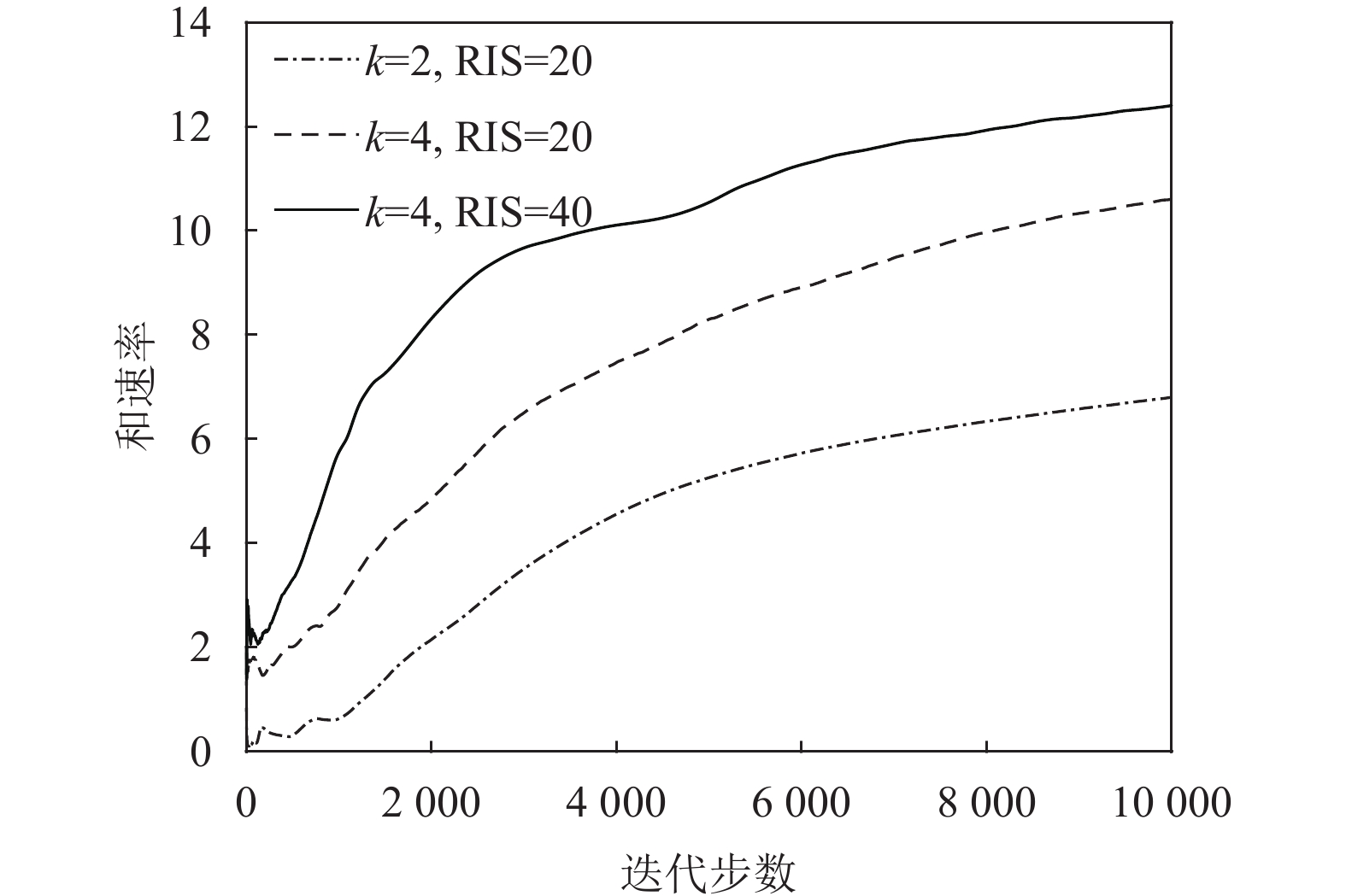
图8显示了在TD3算法下,改变用户个数和RIS元件个数对系统性能的影响。从图中可以看到,改变用户个数和RIS元件个数,和速率会随着用户个数以及RIS元件个数的增加而增加。
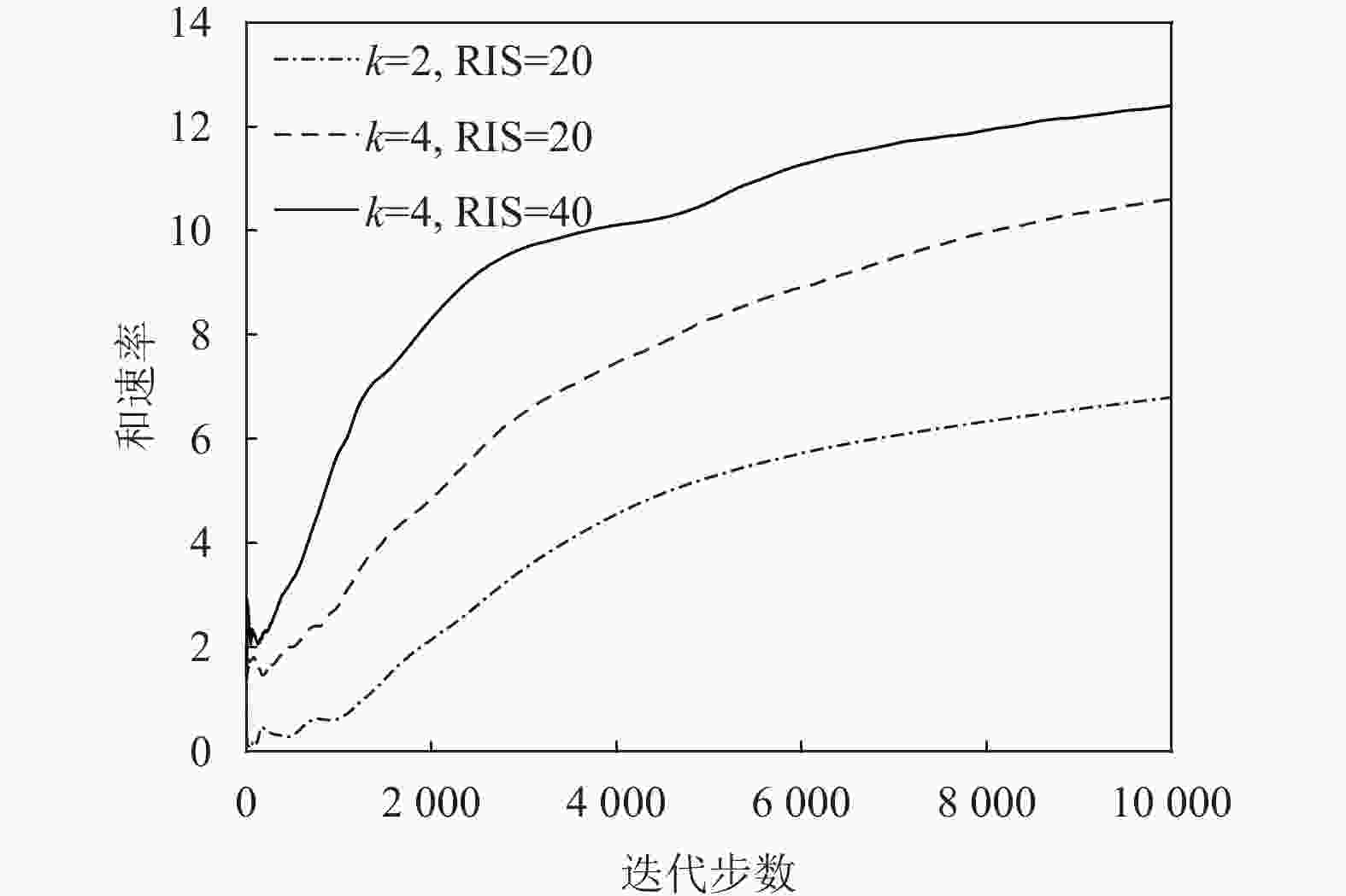
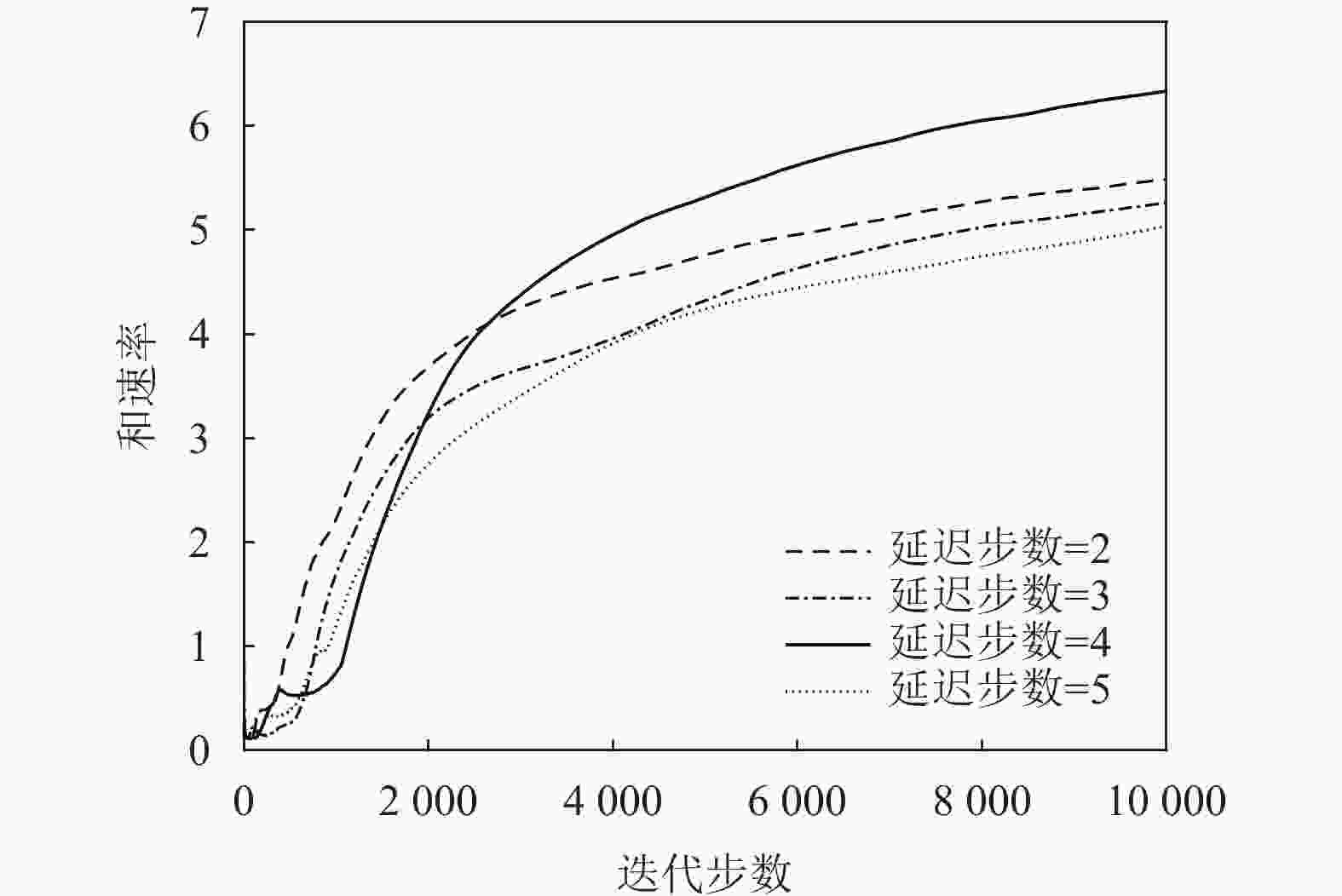
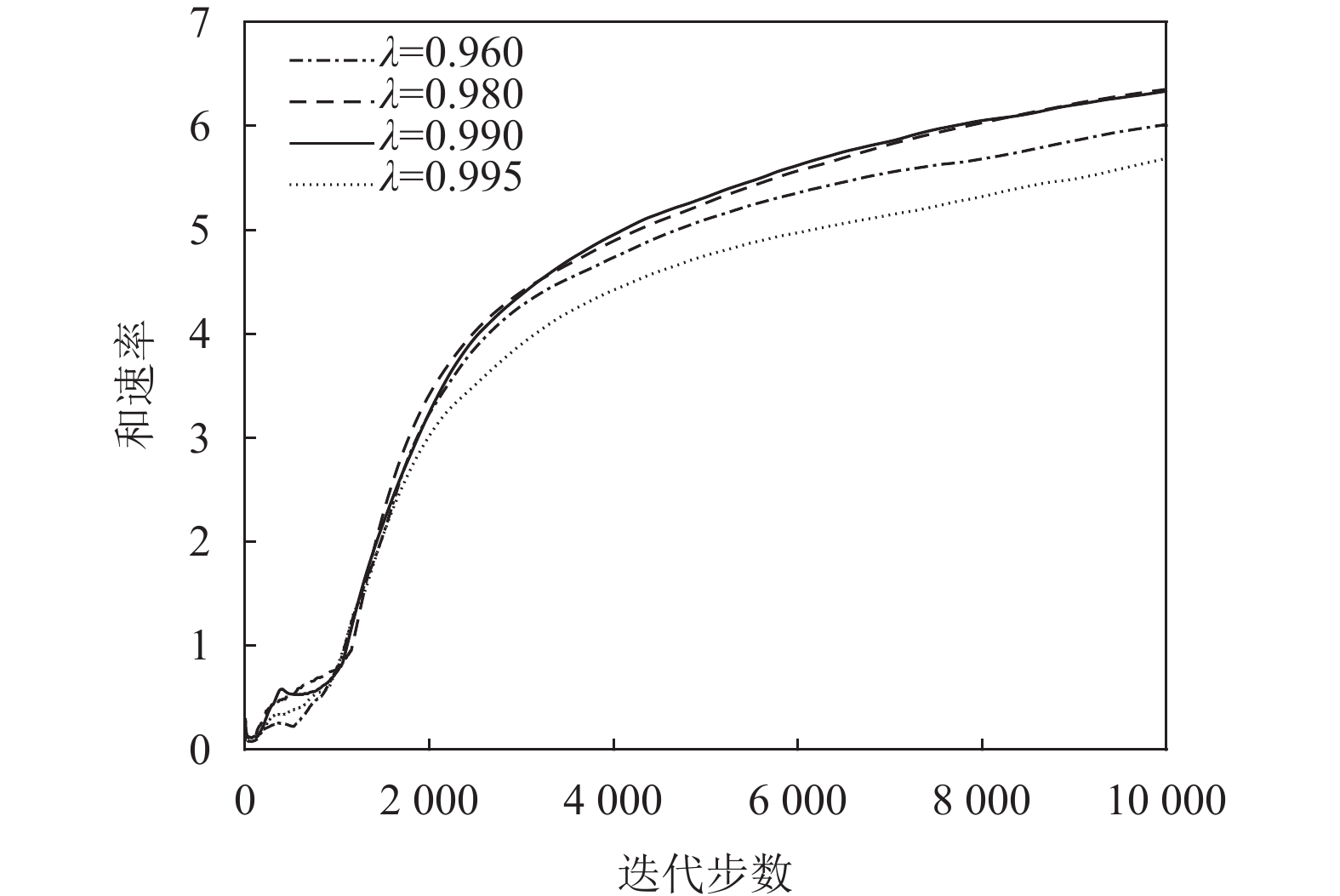
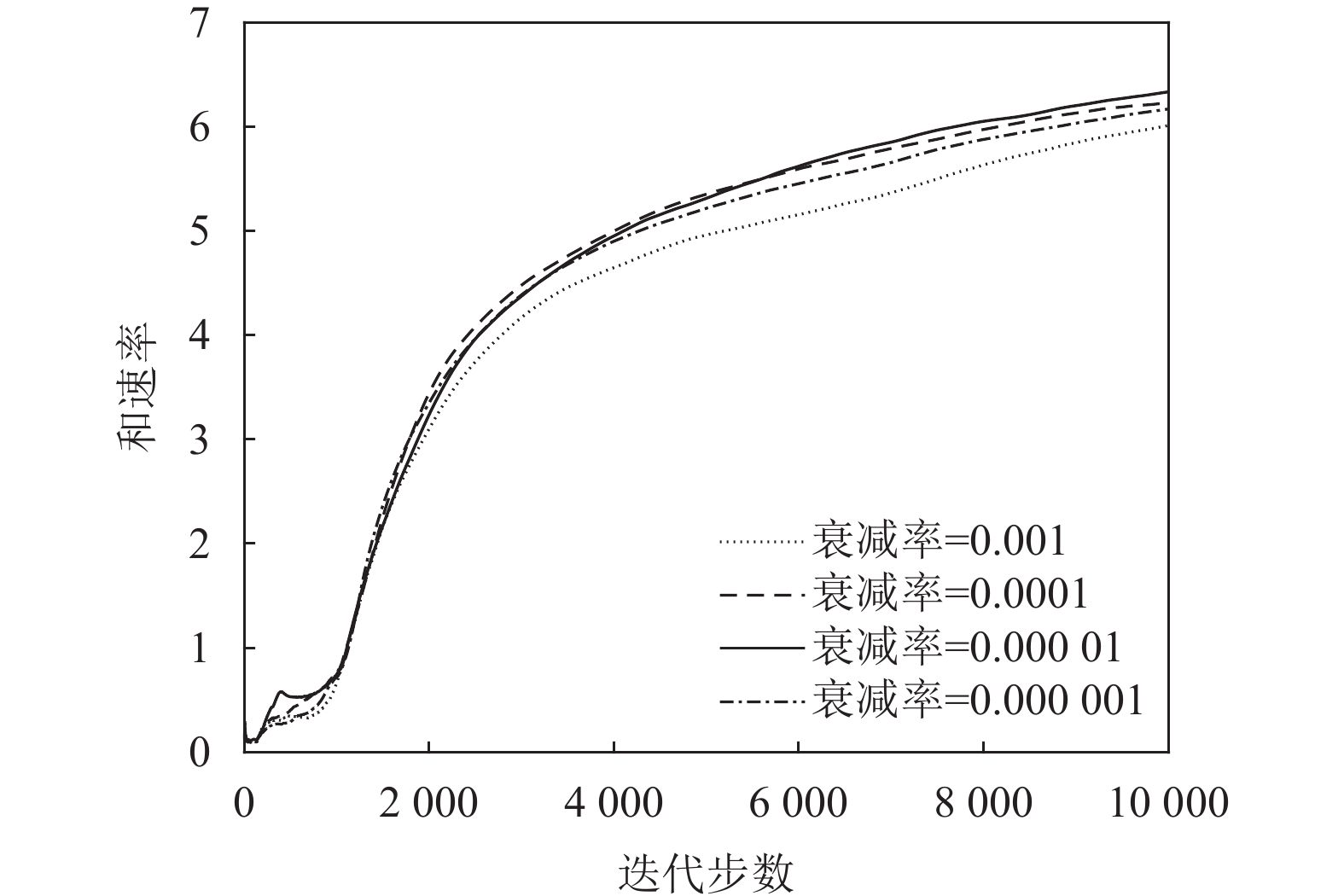
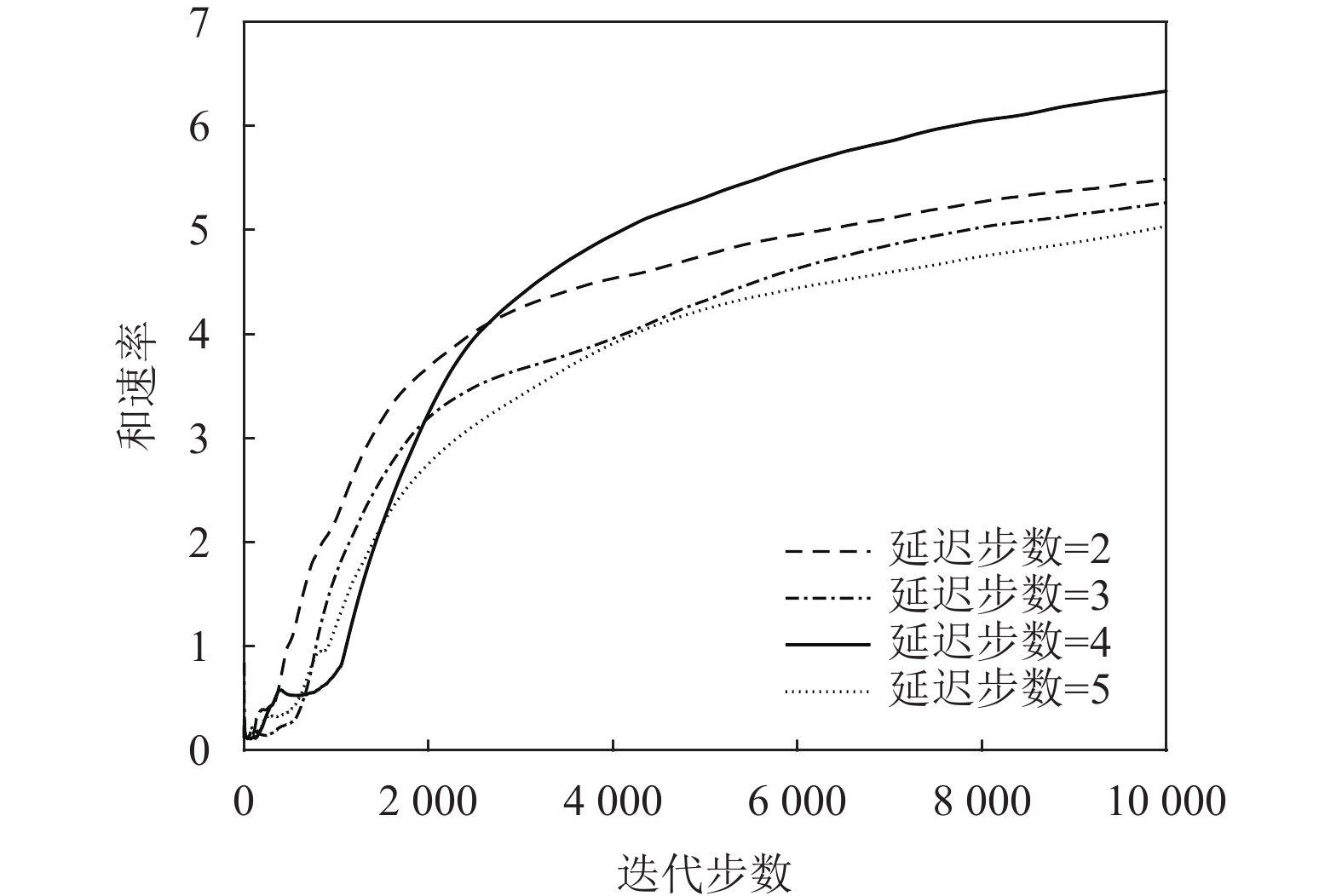
图9、图10、图11都基于TD3算法分别研究了奖励折扣率
$\gamma $ 、不同衰减率$\lambda $ 和策略网络延迟同步更新步数${T_{{\rm{step}}}}$ 对算法性能的影响。设置参数$\gamma = \{ 0.96, 0.98,0.99,0.995\}$ ,$\lambda = \{ 0.001,0.000\;1,$ $0.000\;01, 0.000\;001\}$ 和${T_{{\rm{step}}}} = \{ 2,3,5\}$ 。图9与图10表明网络参数中$\gamma $ 、$\lambda $ 对系统奖励和速率的影响很小,并且在$\gamma = 0.99$ 和$\lambda = 0.000\;01$ 的条件下和速率最大。图11表明策略网络延迟同步更新的步数对系统性能影响较小。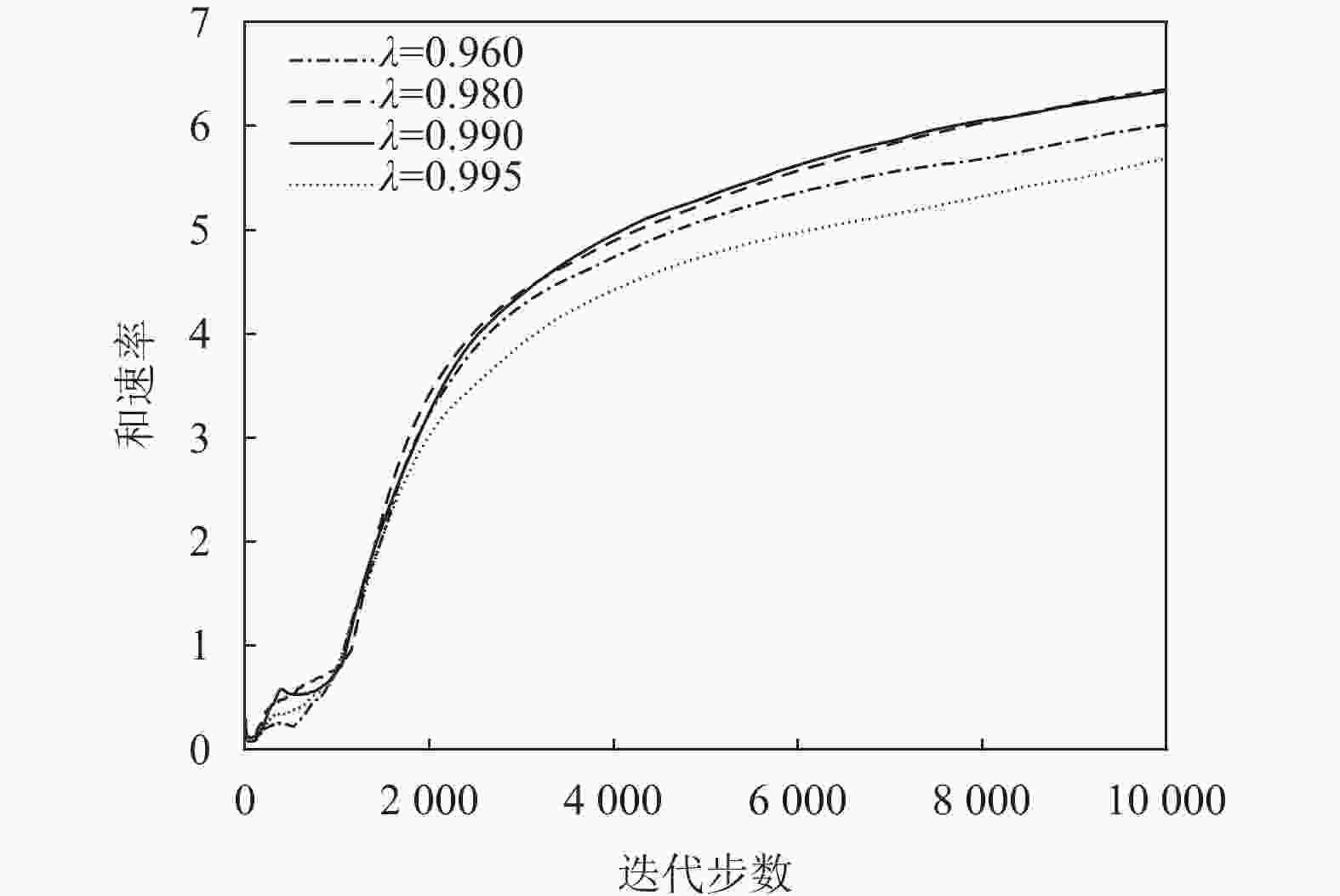
本文算法中的网络均为4层前馈神经网络。DQN算法中的评价网络与TD3算法中的Actor网络的每层神经元个数分别为
$| S |$ 、$2| S |$ 、$2| A |$ 、$| A |$ ,DQN算法中目标网络与TD3算法中Critic网络的每层神经元个数分别为$| S |$ 、$2| S | + | A |$ 、100,所以DQN算法的计算复杂度为$\mathcal{O}(E T ((| S | \times 2| S | + 2| S | \times 2| A | + $ $ 2| A | | A |) + (| S | (2| S | + | A |) + (2| S | + | A |) \times 100))) $ ,TD3算法的计算复杂度为$ \mathcal{O}(2 E T ((| S | \times 2| S | + $ $2| S | \times 2| A | + 2| A | | A |) + 2 (| S | (2| S | + | A |)) + (2| S | +$ $| A |) \times 100)))$ ,其中,$| S |$ 为状态数,$| A |$ 为动作数,$E$ 为回合数,$T$ 为每回合的步数。文献[11]中凸优化算法复杂度为$\mathcal{O}({(M + 1)^{4.5}})$ ,$M$ 为智能反射面元件个数。与凸优化算法相比,本文所用强化学习算法在训练时复杂度较高,但当训练阶段结束后进行预测时,算法的复杂度会变得非常小。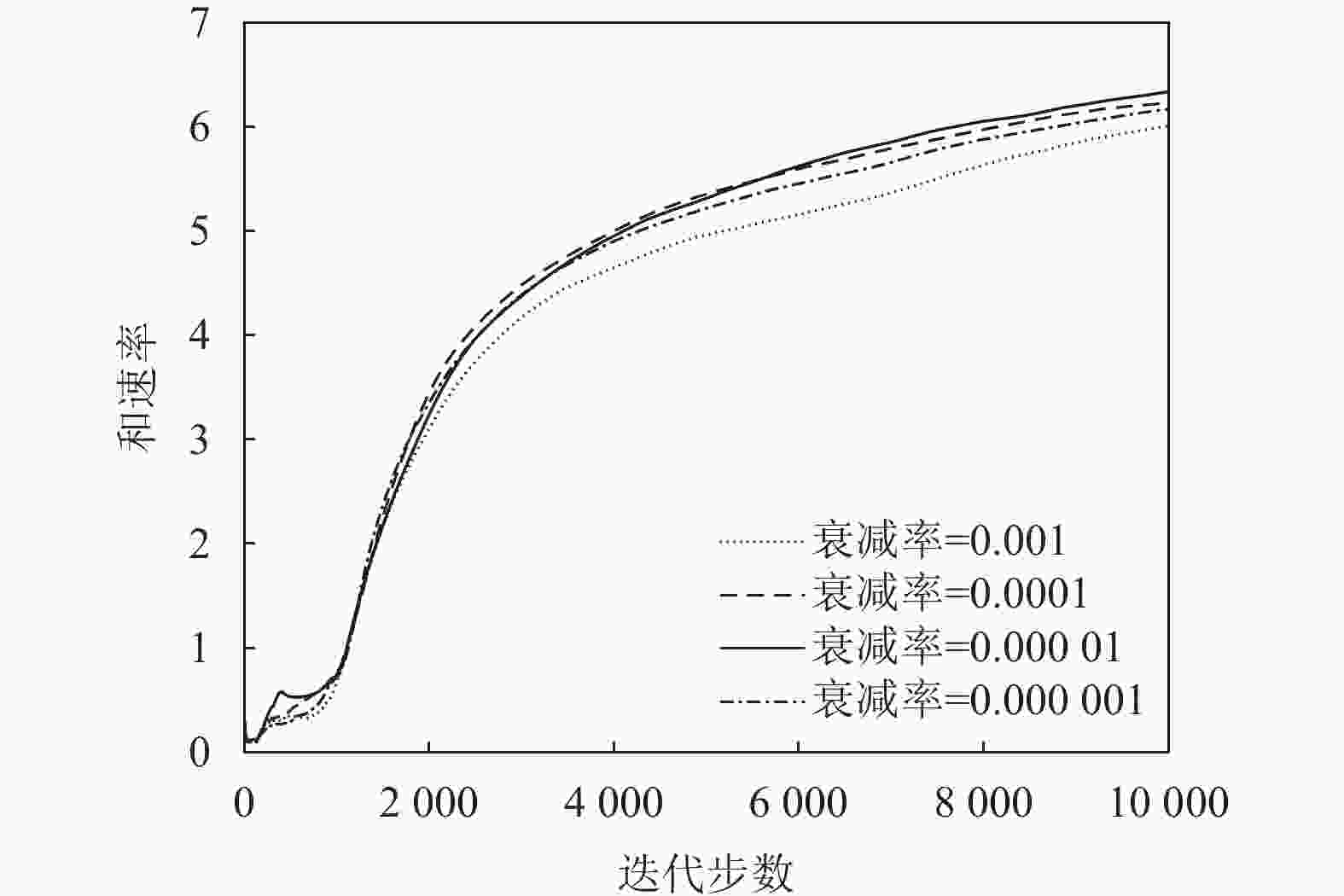
-
为了支持毫米波多用户通信传输,本文引入了分布式部署RIS单元来辅助毫米波通信,并基于DRL技术的最新进展,提出了离散化和连续两种情况下的发射波束赋形和相位偏转的联合设计,实现最大化RIS辅助毫米波通信系统的加权和速率。本文提出的基于DRL的算法具有较强的鲁棒性,因此很容易适应各种通信系统设置。
Continuous vs Discrete: Phase Performance Comparison of RIS-Assisted Millimeter Wave Communication Based on Deep Reinforcement Learning
doi: 10.12178/1001-0548.2022285
- Received Date: 2022-08-22
- Rev Recd Date: 2023-05-29
- Available Online: 2024-01-27
- Publish Date: 2024-01-30
-
Key words:
- deep Q network(DQN) /
- deep reinforcement learning /
- delayed deep deterministic policy gradient /
- millimeter wave /
- reconfigurable intelligence surface
Abstract: In this paper, in the distributed Reconfigurable Intelligence Surface (RIS) assisted multi-user millimeter wave (mmWave) system, the deep reinforcement learning (DRL) theory is used to learn and adjust transmit beamforming matrix at the base station and phase shift matrix at the RIS, and jointly optimize the transmit beamforming matrix and phase shift matrix to maximize the weighted sum-rate. Specifically, in the discrete action space, we first design the power codebook and the phase codebook, and propose the Deep Q Network(DQN) algorithm to optimize the beamforming matrix and phase shift matrix; then, in the continuous action space, the Twin Delayed Deep Deterministic (TD3) policy gradient algorithm is used to optimize the beamforming matrix and phase shift matrix. The weighted sum-rates of the system in discrete action space and continuous action space with different number of codebook bits are compare through simulation. In addition, compared with the traditional convex optimization algorithm and the zero-forcing precoding with a random PBF algorithm, the sum-rate performance of DRL algorithm is significantly improved, and the sum-rate of the continuous TD3 algorithm exceeds the convex optimization algorithm by 23.89%, and the performance of the discrete DQN algorithm exceeds the traditional convex optimization algorithm when the number of codebook bits is 4.
| Citation: | HU Langtao, YANG Rui, LIU Quanjin, WU Jianlan, JI Wen, WU Lei. Continuous vs Discrete: Phase Performance Comparison of RIS-Assisted Millimeter Wave Communication Based on Deep Reinforcement Learning[J]. Journal of University of Electronic Science and Technology of China, 2024, 53(1): 50-59. doi: 10.12178/1001-0548.2022285

|

































































































































































































































































 DownLoad:
DownLoad: