 ISSN
ISSN 





-
精确的节点定位是物联网位置服务应用的关键。获得了节点的准确位置信息,与位置服务应用的有关数据才有价值。因此,研究精确定位对物联网的位置服务应用至关重要[1-2]。根据测量距离建立的定位方程组多数情况下是非线性方程组,对该方程组的求解方法整体上可分为两大类:一类是非线性处理方法,将定位问题看作优化问题进行求解,如遗传算法[3]等;另一类是线性处理方法,通常利用Taylor级数展开法或其他方法[4]将非线性定位方程组变换成线性方程组后求解。与非线性处理方法相比,基于Taylor级数展开的线性方法具有求解精度高、收敛速度快等优点,成为近年来的一个热点研究。文献[5]提出了基于Taylor级数展开和到达时间的定位算法;文献[6]采用Taylor级数展开和最速下降法实现混合定位;文献[7]利用Taylor级数展开法将二次方程组线性化,实现了基于接收信号强度指示的定位等。这些工作通过不同算法与Taylor级数展开法[8-10]相结合的方式,对精确定位进行了一些有益的探索,但是并没有对传统Taylor级数展开的定位模型进行改进。该模型只考虑未知节点和锚节点的距离,没有考虑未知节点之间的距离,定位信息不够全面,从而导致定位精度不高。因此本文考虑未知节点之间的距离,建立一种新的多元变量Taylor级数展开的定位模型。在此模型的基础上,提出了一种新的定位算法。该算法充分发挥粒子群算法的群体搜索性和多元变量Taylor级数展开法的局部细致搜索性,克服了粒子群算法后期搜索效率低下和多元变量Taylor级数展开法对初始值敏感的缺陷。由于增加了未知节点之间的距离信息,该方法能有效地提高定位精度。为了评价该算法的性能,对定位结果的Cramer-Rao下界进行了推导,并通过仿真验证算法的有效性。
HTML
-
考虑I个未知节点和K个锚节点随机均匀部署在二维空间中。物联网获得到达时间的测量值[11-12],经过计算得到第i个未知节点(xi, yi)(i=1, 2, …,I)与所有锚节点之间的测量距离:
式中,$ ({u_k}, {v_k}) $为$ k\; \in (1, 2, \cdots, K) $个锚节点的坐标;$ {d'_{i, k}} $和$ \sqrt {{{({x_i}-{u_k})}^2} + {{({y_i}-{v_k})}^2}} $分别表示未知节点与锚节点之间的测量距离和实际距离;$ {e'_{i, k}} $表示距离测量误差,假设该误差服从均值为0、方差为$ \sigma _{{{l}_{1}},k}^{'2}$ 的高斯分布[13-14]。在未知节点的初始值$ ({\hat x_i}, {\hat y_i})$上,对式(1)中的$ \sqrt {{{({x_i}-{u_k})}^2} + {{({y_i}-{v_k})}^2}} $进行基于(xi, yi)的Taylor级数展开并忽略二阶以上分量,有:
式中,$ {\hat d'_{i, k}} = \sqrt {{{({{\hat x}_i} - {u_k})}^2} + {{({{\hat y}_i} - {v_k})}^2}} $ 为未知节点与锚节点之间的估计距离;$ \Delta {x_i} = {x_i}-{{\hat x}_i};\Delta {y_i} = {y_i}-{{\hat y}_i} $;将式(2)移项后得到矩阵形式:
由式(3)可得到定位模型:
利用该模型可以求出第i个未知节点的位置估计值。传统Taylor定位模型只能实现单个未知节点的定位,若要对所有未知节点进行定位,需要循环计算。
-
通过TOA测量法可得到所有节点间的测量距离:
式中,di, j和$\sqrt {{{({x_i}-{x_j})}^2} + {{({y_i}-{y_j})}^2}} $分别表示未知节点(xi, yi)与未知节点(xi, yi)(i=1, 2, …,I)的测量距离和实际距离;ei, j表示距离测量误差,假设该误差服从均值为0、方差为$ \sigma _{i, j}^2$ 的高斯分布。在未知节点的初始值$ ({\hat x_1}, {\hat y_1}, {\hat x_2}, {\hat y_2}, \cdots, {\hat x_I}, {\hat y_I}) $上,对式(5)中的实际距离进行基于多元变量$ ({x_1}, {y_1}, {x_2}, {y_2}, \cdots, {x_I}, {y_I}) $的Taylor级数展开并忽略二阶以上分量,有:
式中,$ {\hat d_{i, j}} = \sqrt {{{({{\hat x}_i} - {{\hat x}_j})}^2} + {{({{\hat y}_i} - {{\hat y}_j})}^2}} $ 为未知节点之间的估计距离;$ \Delta {x_i} = {x_i}-{\hat x_i} $;$ \Delta {y_i} = {y_i}-{\hat y_i} $;$ \Delta {x_j} = {x_j}-{\hat x_j} $;$ \Delta {y_j} = {y_j}-{\hat y_j} $。将式(6)移项后得到矩阵形式:
由式(7)可得到新的定位模型:
式中,E1为距离测量误差矩阵;$ {\mathit{\boldsymbol{ \boldsymbol{\varDelta} }}_1} $为节点位置偏差矩阵;测量距离和估计距离之差矩阵D1是一个$ (C_I^{\rm{2}} + C_I^1C_K^1) \times 1$矩阵;Q1为$ (C_I^{\rm{2}} + C_I^1C_K^1) \times 2I $矩阵,若D1中第q个元素为$ {d_{i, j}}-{\hat d_{i, j}} $,则Q1中第q行第2i-1、2i、2j-1和2j个元素分别为$ \frac{{{{\hat x}_i}-{{\hat x}_j}}}{{{{\hat d}_{i, j}}}} $、$ \frac{{{{\hat y}_i}-{{\hat y}_j}}}{{{{\hat d}_{i, j}}}} $、$ -{\rm{ }}\frac{{{{\hat x}_i}-{{\hat x}_j}}}{{{{\hat d}_{i, j}}}} $、$ -{\rm{ }}\frac{{{{\hat y}_i}-{{\hat y}_j}}}{{{{\hat d}_{i, j}}}} $,该行其余元素为0;若D1中第q个元素为$ {d'_{i, k}}-{\hat d'_{i, k}}{\rm{ }} $,则Q1中第q行第2i-1、2i个元素分别为$ \frac{{{{\hat x}_i}-{u_k}}}{{{{\hat d'}_{i, k}}}}$、$ \frac{{{{\hat y}_i}-{v_k}}}{{{{\hat d'}_{i, k}}}} $,该行其余元素为0。
1.1. 传统Taylor级数展开的定位模型
1.2. 基于多元变量Taylor级数展开的定位模型
-
基于多元变量Taylor级数展开模型的定位算法先用粒子群算法[15-16]计算未知节点的初始值,再根据加权最小二乘法求出其位置的估计值。具体步骤如下:
1) 首先计算第i(i=1)个未知节点的初始值。
2) 假设有N个粒子组成的种群,其中第n个粒子的位置和速度分别表示为$ {\mathit{\boldsymbol{X}}_n} = {({x_n}, {y_n})^T} $和$ {\mathit{\boldsymbol{V}}_n} = {({v_{n, x}}, {v_{n, y}})^{\rm{T}}} $。计算每个粒子的适应度值$ \sum\limits_{k = 1}^K {\left| {\sqrt {{{(x_n^{}-{u_k})}^2} + {{(y_n^{}-{v_k})}^2}}-{{d'}_{i, k}}} \right|} $。
3) 对每个粒子,如果其当前的适应度值小于历史最优位置$ {\mathit{\boldsymbol{P}}_n} = {({p_{n, x}}, {p_{n, y}})^{\rm{T}}} $对应的适应度值,则用粒子当前位置更新粒子最优位置,否则保持不变。
4) 对每个粒子,如果当前的适应度值小于群体历史最优位置$ {\mathit{\boldsymbol{P}}_g} = {({p_{g, x}}, {p_{g, y}})^{\rm{T}}} $对应的适应度值,则将粒子当前位置作为群体最优位置;否则保持不变。
根据式(9)更新粒子的速度和位置,式中,$n \in \left\{ {1, 2, \cdots, N} \right\}$;l为迭代次数;w为惯性因子;c1和c2为正的加速因子;r1和r2为分布于[0, 1]之间的随机数。如果达到最大迭代次数,转向步骤5),否则转向步骤2)。
5) 若所有未知节点都计算完毕,转向步骤6)。否则转向步骤2),继续下一个未知节点(i=i+1)初始位置的计算。
6) 根据粒子群算法得到所有未知节点的初始值$ ({\hat x_1}, {\hat y_1}, {\hat x_2}, {\hat y_2}, \cdots, {\hat x_I}, {\hat y_I}) $,利用式(8)建立新的定位模型$ {\mathit{\boldsymbol{D}}_1} = {\mathit{\boldsymbol{Q}}_1}{\mathit{\boldsymbol{ \boldsymbol{\varDelta} }}_1} + {\mathit{\boldsymbol{E}}_1} $。
7) 利用加权最小二乘法[17]可求解出:
式中,T为测量误差的协方差矩阵。初始递归时,令$ x_1^{(0)} = {\hat x_1} $,$ y_1^{(0)} = {\hat y_1} $,在下一次递归中令:$ x_1^{(l1 + 1)} = x_1^{(l1)} + \Delta {x_1} $,$ y_1^{(l1 + 1)} = y_1^{(l1)} + \Delta {y_1} $,其中L1为迭代次数。重复以上过程,直到$ \sum\limits_{i = 1}^I {(\left| {\Delta {x_i}} \right| + \left| {\Delta {y_i}} \right|)} $小于一个预定的门限ε。
-
设未知节点的真实坐标矢量$ \mathit{\boldsymbol{\theta }} = [{x_1}, {y_1}, {x_2}, {y_2}, \cdots, {x_I}, {y_I}] $,$ d = {[{d_{1, 2}}{\rm{ }} \cdots {\rm{ }}{d_{(I-1), I}}{\rm{ }}{d'_{1, 1}}{\rm{ }} \cdots {\rm{ }}{d'_{I, K}}]^{\rm{T}}} $。$ {e_{i, j}} \sim N(0, \sigma _{i, j}^2) $,$ {{e'}_{i, k}} \sim N(0, \sigma _{{{l}_{1}},k}^{'2}) $,构造似然函数:
对式(11)两边取对数得:
式中,C为一常数。对式(12)求二阶偏导数,构造Fisher信息矩阵:
$ {{l}_{1}}, {{l}_{2}}\ \in (1, 2, \cdots, I) $。对该Fisher矩阵F求逆,得到CRLB表达式:
式中,tr (·)表示矩阵的迹;F-1表示Fisher矩阵的逆。
-
为了验证基于多元变量Taylor级数展开模型的定位算法的有效性,采用Matlab对该算法进行仿真,并与粒子群算法、粒子群和传统Taylor级数展开结合的算法进行对比分析。在120 m × 100 m的矩形仿真区域,随机均匀分布4个锚节点和20个未知节点,仿真次数为1 000次。假设距离测量误差服从均值为0、方差σ2的高斯分布。粒子群参数设定为加速因子c1=c2=1.5,惯性权重w=0.7,粒子群的种群大小N=30,迭代次数l=200。为检验新算法,定位误差定义为$ \frac{\sum\limits_{i=\text{1}}^{I}{\sqrt{{{({{{\hat{x}}}_{i}}-{{x}_{i}})}^{2}}+{{({{{\hat{y}}}_{i}}-{{y}_{i}})}^{2}}}}}{I} $,其中$ ({{\hat{x}}_{i}}, {{\hat{y}}_{i}}) $表示未知节点的估计位置。
-
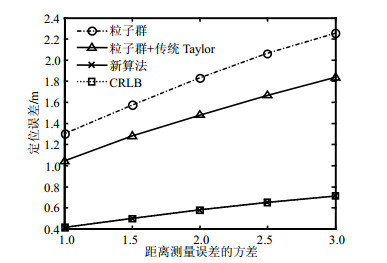
图 1给出了3种算法的定位误差随距离测量误差的方差变化的曲线及CRLB曲线。可以看出,3种算法的定位误差都随测量误差方差的增加而增加,但新算法的定位误差明显小于其他两个算法,且非常接近CRLB曲线。这是因为多元变量Taylor级数展开模型比传统Taylor级数展开模型多考虑了未知节点之间的距离信息,使定位精度得到进一步提高。此外,随着测量误差的变化,新算法的定位误差斜率小于其他两种算法,说明该算法能有效减小测量误差对定位误差的影响。

-
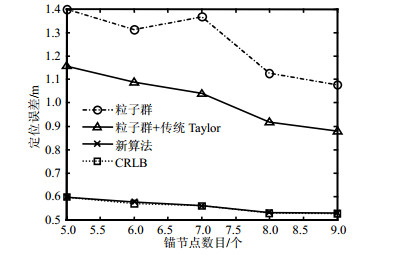
图 2给出了锚节点数目对3种算法定位误差的影响。未知节点数不变时,锚节点数目的变化对定位误差有很大的影响。锚节点数越多,节点的定位误差越小。与此同时,在锚节点数目相同的情况下,新算法的定位精度在原有算法的基础上有了明显的提高。

-
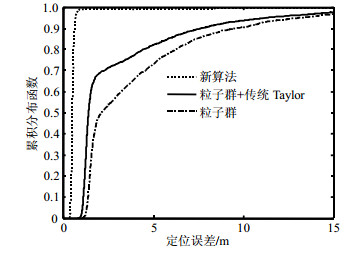
图 3给出了3种算法定位误差的累积分布函数曲线图。可以看出,在90%的累积分布点,粒子群算法、粒子群和传统Taylor级数展开结合的算法、新算法的定位误差分别在14.5、12.2和0.68 m以内,新算法具有较高的定位精度。

4.1. 距离测量误差对定位误差的影响
4.2. 锚节点数目对定位误差的影响
4.3. 定位误差的累积分布函数
-
针对物联网定位精度不高,难以适应复杂信道环境等方面存在的不足,提出了一种新的基于多元变量Taylor级数展开模型的定位方法。该方法结合粒子群算法和多元变量Taylor级数展开法的特点,充分发挥各算法的优点,扬长避短,实现整体定位性能的最优化。通过仿真验证,新算法能有效地减少测量误差对定位精度的影响,提高定位精度。但该算法只考虑了所有距离测量信息已知的情况,部分距离测量信息未知的情况还有待进一步研究。

 DownLoad:
DownLoad: