 ISSN
ISSN 





-
有源欺骗式干扰[1]主要应用于自卫式干扰和随队干扰中,可以利用雷达的匹配滤波增益,以较小功率达到较好的干扰效果,故其干扰技术及对抗策略成为学者研究的热点问题[2]。针对欺骗式干扰,单站雷达可利用发射信号优化[3]、运动学信息[4]和极化信息[5],以及DRFM量化误差[6-7]对假目标进行鉴别,但单站雷达成本有限、视角单一,所能达到的抗干扰效能有限,对于逼真度较高的有源假目标,对抗效果不理想。
组网雷达可充分发挥多雷达数据融合的优势,利用真实目标的空间分布差异实现假目标的有效识别[8]。对于真目标,各节点雷达上产生的量测值转换到统一坐标系下,是位置信息重合、速度信息一致的。虽然由于雷达两量测误差的存在,可能不是完全相同的,也会位置相对“集中”,速度近似相同,称之为真实目标的空间相关性。然而,对于假目标,在干扰机没有准确获知所有节点雷达参数的情况下,无法对组网雷达进行协同欺骗,其位置相对“分散”,速度参数相差较大,即不具备空间相关性。利用真假目标空间相关性的差异,文献[9]提出一种自适应门限同源检验进行假目标鉴别的方法,是数据融合对抗欺骗式干扰的典型方法。
组网雷达中各雷达的相对位置会直接影响目标的空间相关性检验,因此,研究欺骗式干扰下组网雷达的优化布站有重要意义,通过优化布站可切实提高组网雷达抗欺骗式干扰的能力,降低组网雷达被欺骗概率。本文首先分析得到组网雷达被欺骗概率的理论值;在此基础上,研究被欺骗概率最小和雷达网覆盖范围最大下的联合优化布站问题;最后,对组网雷达的优化布站进行仿真分析。
HTML
-
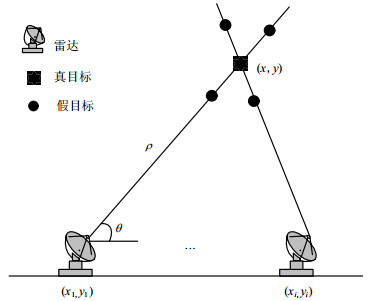
本文主要讨论距离欺骗式干扰,即假目标位于雷达节点和真目标的延长线上[9]。假设目标和各雷达节点位于同一平面上,为场景论述方便,雷达分布及真假目标信息如图 1所示。

组网雷达对各目标的量测是在各节点雷达为圆心的极坐标系中进行,在融合中心进行点迹关联之前,需要进行空间对准,即将各个组网雷达的量测值转换到统一的直角坐标系中[10]。对于节点雷达$ i $,其位置坐标为$ ({x_i}, {y_i}) $,设检测到目标的参数为$ (\rho, \theta ) $,则变换到统一坐标系的坐标为$ {{\boldsymbol{Z}}_i} = {[x, y]^{\rm{T}}} $:
空间对准后,各节点雷达的量测误差$ {\rm{d}}{{\boldsymbol{Z}}_i} $近似服从零均值的高斯分布,即$ d{{\boldsymbol{Z}}_{i}}\tilde{\ }N(0, {{\boldsymbol{P}}_{i}}) $,其误差协方差矩阵$ {{\boldsymbol{P}}_i} $为:
式中,是转换矩阵,通过对式(1)两边微分得到;$ \mathit{\boldsymbol{ \boldsymbol{\varLambda} }}_i = {\rm{diag}}(\sigma _{\rho, i}^2, \sigma _{\theta, i}^2) $;$ {\sigma _{\rho, i}} $, $ {\sigma _{\theta, i}} $分别表示节点雷达i的测距及测角误差。
记$ {H_0} $表示两量测值$ {{\boldsymbol{Z}}_i} $和$ {{\boldsymbol{Z}}_j} $对应真实目标,$ {H_1} $表示其对立假设,即两量测值$ {{\boldsymbol{Z}}_i} $和$ {{\boldsymbol{Z}}_j} $对应欺骗式假目标。在$ {H_0} $成立的条件下,设各雷达的测量误差相互独立,两雷达量测值之差$ \Delta \boldsymbol{Z}=(\text{d}{{\boldsymbol{Z}}_{i}}-\text{d}{{\boldsymbol{Z}}_{j}})\tilde{\ } $ $ N(0, {\sum _{ij}}) $,也近似服从零均值的高斯分布。其中,$ {\sum _{ij}} $的定义为:
选择两雷达量测之间的马氏距离[11]为统计检验量:
近似服从$ {\chi ^2} $分布,即在$ {H_0} $成立的条件下,马氏距离服从$ {\chi ^2} $分布。据此可对$ {H_0} $进行假设检验,假设检验模型如下:
即:若$ {d_{ij}} \le \delta $成立,则接受$ {H_0} $,否则接受$ {H_1} $。在保证真实目标的误判概率小于等于$ \alpha $的条件下($ P({H_1}\left| {{H_0}} \right.) \le \alpha $),检测门限$ \delta $是由假设检验的显著性水平$ \alpha $决定的,即$ \delta = \chi _{1 - \alpha }^2(2) $。
在雷达个数大于2的情况下,每两部雷达均对假目标进行鉴别,然后对所有的判别结果进行融合处理,得到最终的鉴别结果。判决融合算法可以选择“取与”“取并”或利用K/M法则实现折中。一般采用最严格的“取与”法则进行判决融合(当且仅当所有融合结果均判断其为假目标,则该目标为假目标)。这种判决融合法则可最大限度地保证真实目标的正确鉴别概率。
-
数据融合的方法可以在保证真实目标的误判概率小于等于$ \alpha $的条件下,对假目标进行鉴别,而该方法对假目标的鉴别效果是本节研究的内容。首先计算两部节点雷达进行数据融合算法对假目标的误判概率,再得到判决融合后,对假目标的误判概率,即为最终组网雷达的被欺骗概率。
根据真实目标的空间相关性,可知两雷达对真实目标的状态估计值之间的差异$ \Delta Z $服从零均值,协方差矩阵为$ \sum $的正态分布;而对于假目标,两雷达的状态估计值之间的差异$ \Delta Z $服从均值为$ \mathit{\boldsymbol{ \boldsymbol{E} }} $,协方差矩阵为$ \sum $的正态分布,如式(5)所示:
式中,$ \sum $是由式(3)得到的两雷达的测量差异的误差协方差矩阵,是对称矩阵,因此可记为,$ {\sigma _x} = \sqrt {{\xi _{11}}} $表示x轴测量差异的精度,$ {\sigma _y} = \sqrt {{\xi _{22}}} $表示y轴测量差异的精度,$ \rho ={{{\xi }_{12}}}/{({{\sigma }_{x}}{{\sigma }_{y}})}\; $表示x轴测量差异与y轴测量差异的相关系数。
在$ {H_0} $成立的条件下,马氏距离$ d = \Delta {{\boldsymbol{Z}}^{\rm{T}}}{\sum ^{ - 1}} \times $ $ \Delta \boldsymbol{Z}\tilde{\ }{{\chi }^{2}}(2) $,由显著性水平$ \alpha $得到假设检验的门限$ \delta = \chi _{1 - \alpha }^2(2) $。其中,显著性水平$ \alpha = P({H_1}\left| {{H_0}} \right.) $,表示真实目标的误判概率。
在$ {H_1} $成立的条件下,均值$ {\boldsymbol{E}} = {[{u_x}, {u_y}]^{\rm{T}}} $由两雷达位置坐标$ ({x_1}, {y_1}) $和$ ({x_2}, {y_2}) $、真实目标位置坐标$ (x, y) $和欺骗距离$ \Delta d $共同决定。第i部节点雷达探测到的假目标在统一直角坐标系下的坐标为$ (x_i^f, y_i^f) $:
式中,$ ({\rho _i}, {\theta _i}) $为真实目标在以第一部节点雷达为中心的极坐标系中的坐标;$ {\rho _i} = $$ \sqrt {{{(x - {x_i})}^2} + {{(y - {y_i})}^2}} $;$ {\theta _i} = \arctan \left( {(y - {y_i})/(x - {x_i})} \right) $。
根据式(6),得到测量差异$ \Delta \mathit{\boldsymbol{ \boldsymbol{Z} }} $的均值为:
则$ \Delta \mathit{\boldsymbol{ \boldsymbol{Z} }} $的二维概率密度函数为:
马氏距离$ d = \Delta {{\boldsymbol{Z}}^{\rm{T}}}{\sum ^{ - 1}}\Delta {\boldsymbol{Z}} $可以进一步化简为:
式中,$ K = \frac{1}{{\sigma _x^2\sigma _y^2(1 - {\rho ^2})}} $;$ K' = \frac{1}{{1 - {\rho ^2}}} $。
根据假设检验模型式(4),可以看到数据融合方法对假目标的误判概率$ P $为:
将式(9)带入式(10),可以得到:
因此,对假目标的误判概率$ P $可以表示为$ \Delta {\boldsymbol{Z}} $的概率密度函数$ f(x, y) $在积分区$ \mathit{\Omega} $上的二重积分:
进一步化简得到:
若采用最严格的“取与”法则进行最终的判决融合,组网雷达被欺骗概率$ {P_f} $为:
式中,$ N $表示组网雷达中节点雷达的个数。$ {P_{ij}} $为第i部和第j部节点雷达进行数据融合对假目标的误判概率,根据式(12),可以写为$ {{P}_{ij}}=\iint\limits_{{{\mathit{\boldsymbol{ \boldsymbol{\varOmega} }} }_{ij}}}{{{f}_{ij}}(x, y)\text{d}x\text{d}y} $。
-
根据第2节的理论分析可知,组网雷达被欺骗概率与两雷达相对目标的位置有关,所以通过对组网雷达中的节点雷达进行布站优化,可以使得其被欺骗概率最小。对组网雷达进行布站优化,首先需要选定探测区域$ {\mathit{\Omega} _D} $,通过最小化该探测区域的被欺骗概率,完成雷达布站。同时,除了保证组网雷达的被欺骗概率最小这一优化目标外,还需要考虑最大化组网雷达的覆盖范围,因此组网雷达优化布站是一个联合优化问题。
根据第2节中得到的组网雷达被欺骗概率的理论值,可以得到最小化被欺骗概率的优化目标函数为:
式中,$ {X_i} $表示第i部节点雷达的位置坐标;$ w $表示探测区域$ {\mathit{\Omega} _D} $不同区域的加权系数,与该区域的危险程度有关。
最大化组网雷达的覆盖范围的目标函数可以写为:
式中,各节点雷达的覆盖范围为$ {S_i} = \{ X\left| {\left\| {X - } \right.} \right. $ $ \left. {{X_i}} \right\| \le {R_{i\max }}\} $。
同时,组网雷达的布站位置也有一定的限制条件。首先,为保证多视角的优势和雷达接收到目标信号之间的非相干性,两雷达的距离不能太近,要大于一个门限值$ \left\| {{X_i} - {X_j}} \right\| \ge \Delta {R_{\min }}, {\rm{ }}i \ne j $;其次,真假目标鉴别利用了组网雷达的冗余探测,则必须保证探测区域$ {\mathit{\Omega} _D} $在雷达的探测范围内$ \left\| {{X_i} - X} \right\| \le $ $ {R_{i\max }}, {\rm{ }}\forall X \in {\mathit{\Omega} _D} $。
设组网雷达的可布站范围为$ \mathit{\Psi} $,组网雷达布站的优化问题可以写为:
式中,$ \Delta {R_{\min }} $表示组网雷达中两雷达之间的最小距离;$ {R_{i\max }} $为雷达i的最大作用距离。
对于多目标优化问题,可以求得Pareto最优值,即对多个目标函数附以不同的权系数,合成一个标量目标函数,再进行优化求解。因此优化问题的目标函数可以简化为:
式中,$ 0 \le \lambda \le 1 $,$ \lambda $的大小反应了对组网雷达被欺骗概率和覆盖范围优化的侧重程度。
1) 当$ \lambda = 0 $时,式(21) 简化为$ \mathop {\max }\limits_{{X_i}} \left( {\bigcup\limits_{i = 1}^N {{S_i}} } \right) $,通过代数计算$ {X_i} $,得到指定区域仅考虑雷达网覆盖范围最大情况下的雷达布站方案;
2) 当$ \lambda = 1 $时,式(21) 简化为$ \mathop {\min }\limits_{{X_i}} \left( {\sum\limits_{{\mathit{\boldsymbol{ \boldsymbol{\varOmega} }} _D}} {w{p_f}} } \right) $,通过代数计算$ {X_i} $,得到指定区域仅考虑组网雷达被欺骗概率最小情况下的雷达布站方案;
3) 当$ 0 < \lambda < 1 $时,根据不同侧重条件下$ \lambda $大小简化式(21),得到指定区域雷达网覆盖范围最大和被欺骗概率最小的情况下,联合优化的雷达布站方案。
-
以两部节点雷达为例,对组网雷达的被欺骗概率理论值进行仿真验证,设真实目标的位置坐标为(50, 30) km,各节点雷达参数如表 1所示。
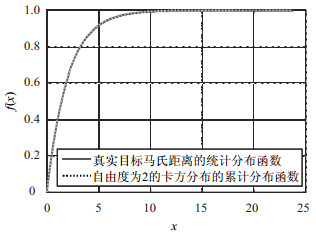
位置坐标/km 测距误差/m 测角误差/rad 雷达1 (15, 0) 70 0.002 雷达2 (75, 0) 70 0.002 在$ {H_0} $条件下,进行10万次Monto Carlo实验,统计出真实目标的马氏距离的累积分布函数,如图 2所示,与$ {\chi ^2}(2) $分布的累积分布函数进行比较,可以看到两个分布曲线非常近似。利用Kolmogorov-Smirnov检验,对真实目标的马氏距离的统计采样值进行测试,多次测试结果均表明真实目标的马氏距离是服从$ {\chi ^2}(2) $分布的。

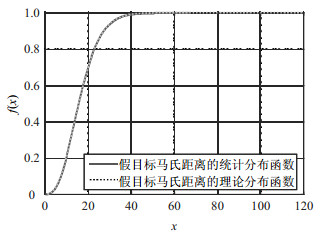
设距离欺骗假目标的欺骗距离为300 m,进行多次Monto Carlo仿真实验,统计出该假目标的马氏距离的累积分布函数与理论分布函数式如图 3所示。可以看到经验分布函数与理论分布函数非常近似。

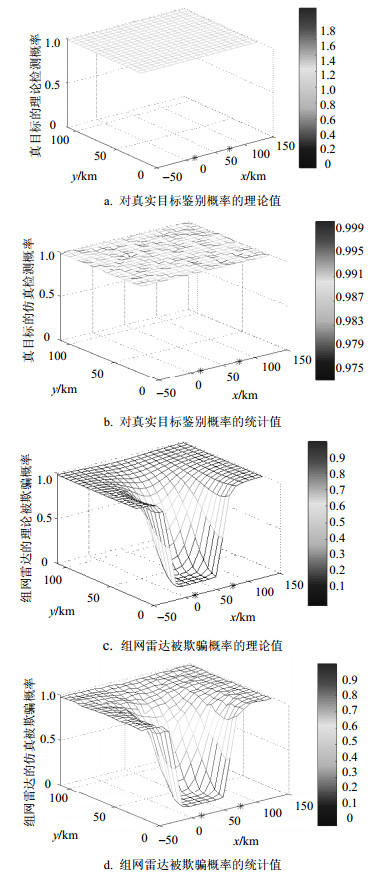
选择显著性水平$ \alpha $为0.01,得到检测门限$ \delta $为9.21,统计出真目标的检测概率及组网雷达被欺骗概率如表 2所示。
对真实目标鉴别概率/% 对假目标误判概率/% 仿真结果 98.98 2.8 理论结果 99.00 2.4 同时,对区间进行检测,x轴的范围为-50~150 km,y轴的范围为-20~110 km,可以得到整个区域的真目标的检测概率,及组网雷达被欺骗概率的仿真统计结果和理论结果,如图 4所示。

从表 2及图 4的仿真结果可以看到,组网雷达被欺骗概率的理论值与仿真实验统计出来的概率十分接近,从而验证了本文对组网雷达被欺骗概率的理论分析是正确的。
-
以3部节点雷达组成的组网雷达为例,进行优化布站仿真分析,不失一般性,设探测区域$ {\mathit{\Omega} _D} $为圆形区域,且等半径地分成5个子区域,每个子区域的加权系数由内到外依次增加:
式中,$ {X_0} $表示探测区域的圆心;$ R $为其半径。每个子区域的加权系数分别为:
雷达可布站范围$ \mathit{\Psi} $为长方形区域:x轴变化范围为-80~-40 km,y轴变化范围为-80~80 km,各节点雷达的参数相同,其威力范围半径$ R_{i\max }^{} = 100 $ km,测角精度0.002 rad,测距精度70 m;两雷达之间的最小距离限制为$ \Delta {R_{\min }} = 10 $km,其他参数与4.1节相同。
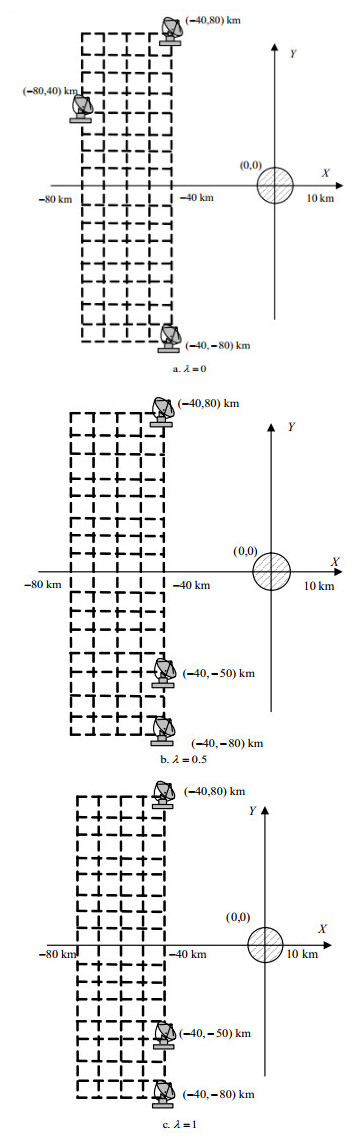
选择探测区域中心$ {X_0} = {[0, 0]^{\rm{T}}} $,半径$ R = 10 $km,在不同加权系数$ \lambda $下,可以得到对3部雷达进行优化布站的结果,如图 5所示。

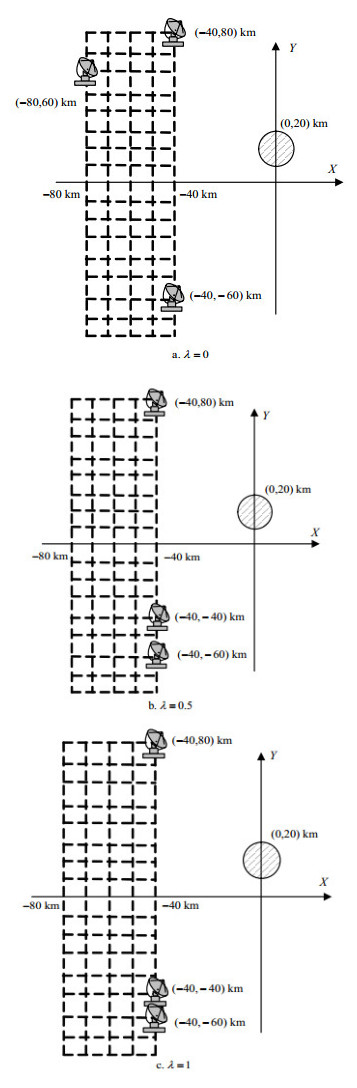
选择探测区域中心$ {X_0} = {[0, 20]^{\rm{T}}} $km,半径$ R = 10 $km,在不同加权系数$ \lambda $下,可以得到对3部雷达进行优化布站的结果,如图 6所示。

根据图 5和图 6的仿真结果,可以看到$ \lambda = 0 $的情况下,3部节点雷达在可布站区域内尽可能的分散,以保证整个组网雷达的覆盖范围最大;$ \lambda = 1 $的情况下,3部节点雷达在可布站区域内尽可能的靠近探测区域,因为此时可以得到相对探测区域的最大空间角度差异,而空间角度的差异越大,数据融合对假目标的鉴别效果越好。
4.1. 组网雷达被欺骗概率的仿真验证
4.2. 组网雷达优化布站方法
-
本文首先从理论上研究了数据融合对抗欺骗式干扰的能力,给出了组网雷达的被欺骗概率的理论值;并利用理论值研究了欺骗式干扰下组网雷达的优化布站问题,可以实现被欺骗概率最小和雷达网覆盖范围最大下的联合优化布站。本文的结果分析对组网雷达布站具有一定的理论指导意义。

 DownLoad:
DownLoad: