 ISSN
ISSN 





-
在当今科技进一步发展,石化能源短缺和环境污染的大环境下,新能源技术得到了世界各国的重点扶持与研究,电动汽车以及混合动力汽车势必成为未来的重要交通工具。其中,以锂离子电池为主的动力电池作为新能源汽车的直接能量来源,在能量密度、充放电效率方面较传统的铅酸电池优势明显,逐渐成为研究的主流。锂离子电池的安全性需要先进的电池管理系统(battery management system, BMS)来保证。BMS对单体电池的温度、电压、电流等参数进行实时采集,并基于预设的算法,避免电池的过充、过放。电池的荷电状态估计(state of charge, SoC)是对电池剩余电量估计的指标,是BMS的核心内容。对SoC准确估计一方面在用户层面提高了系统的易用性,汽车驾驶员可以在合理的时间范围内驾驶、保养车体;另一方面在电池内部层面,它可避免电池可能的永久性伤害,延长了锂离子动力电池的使用寿命。
电池SoC的估计方法主要包括3种:1) 库仑积分法[1]。该方法通过对电流连续检测进行积分,得到电池释放或吸收的电量,从而得出电池的SoC值。这种方法并没有从电池内部解决电量与电池状态的关系,而是从外部记录进出电池的能量,随着电池的老化,其精确度也逐渐丧失。再者,因传感器的采样精度或外部环境造成的噪声信号,会在算法中积累导致估计偏差越来越大。2) 神经网络法[2-3]。神经网络是一种由隐含层构成的多层前馈网络,具有非线性特征,自学习能力强,常用于解决和处理复杂问题,但处理过程受训练样本和训练方法的影响很大。因此,虽然这一方法能够快速、方便、高精度地估算SOC,但这是建立在大量的实验数据基础之上的,其估算误差受训练数据、训练方法的影响也很大。与此同时,神经网络训练周期长、计算量大,对硬件资源的要求高等特点进一步限制了其在车载电池管理系统上的应用。3) Kalman滤波方法[4-8]。Kalman滤波是一个最优化自回归数据处理方法,能够对动力系统的状态做出最小方差意义上的最优估计。该方法收敛较快,对初始值精度要求低,并且具有一定的抗噪声能力,受到了近十年来最为广泛的研究。文献[4]详细描述了利用扩展Kalman估计电池SOC的方法,然其最大的问题在于对外部环境噪音做了过多的假设,导致其鲁棒性有待提高。
在电池SoC估计的仿真和半实物仿真研究中,大部分都将噪声信号认为是零均值的高斯白噪声。然而在实际工程应用中,电池电流信号的采集通常采用低成本的传感器,如分流器。这类传感器采集的信号不仅噪声大,而且往往都是有色噪声,可以视为是零均值的高斯白噪声和低频变化的偏置组合而成的信号。其中零均值高斯白噪声的部分可以方便地被观测器滤除,但偏置部分不仅难以处理,且会对估计效果造成不利影响。文献[9]采用非线性扩散滤波和自学习策略来分别处理白噪声和偏置,不仅算法复杂,而且因需要20 s的数据进行预处理而影响实时性。文献[10]利用H∞观测器和库伦积分法在SoC估计结果上的差值估计电流偏置,不仅导致算法结构复杂,而且无法消除因模型偏差造成的不利影响。为此本文提出的H∞观测器将电流偏置作为系统状态与电池状态进行同步在线估计,并对该去偏方法对电池状态估计的影响进行深入分析。
HTML
-
考虑偏置电流和噪声干扰的电池模型状态空间方程如下:
式中,OCV(SoC)是SoC控制的电压源;SoC为电流I的积分,而I的测量值中包含会影响SoC估计精度的偏置电流Ib; ${U^{{R_1}{C_1}}}$ 和 ${U^{{R_2}{C_2}}}$ 分别为对应阻容网络电容(或电阻)上的电压;将 $(I - {I^b})$ 作为输入电池的实际电流,其数值为正,表示充电;wk为过程噪声(即电流测量噪声);vk为电压测量噪声;yk为系统输出。
设含有偏置电流Ib的状态变量为:
将SoC的变化范围取为0~100(以百分数表示),式(1) 中的各个矩阵如下所示:
式中,Cap为电池容量; ${\tau _1} = {R_1}{C_1}$ ; ${\tau _2} = {R_2}{C_2}$ ; $\Delta t$ 为系统采样周期。
将式(2) 转换成如式(7) 所示的形式:
式中,;Dk=R0; $\frac{{{\rm{dOCV}}}}{{{\rm{dSoC}}}}$ 的计算可通过式(8) 进行:
-
对于式(1) 和式(2) 所示的系统,如果定义观测矩阵Lk,令zk= Lkxk,则zk就是当前要实际估计的对象。H∞方法要求对象zk的实际估计偏差应控制在和噪声相关的范围之内,即满足以下方程:
式中,J定义为:
矩阵P0> 0,Q > 0,W > 0和V > 0为权重参数矩阵,H∞观测器对参数估计效果与权重参数的设置有密切关系;θ是性能边界参数,这里表示为估计误差的加权范数与噪声的加权范数之比的倒数,其数值越大越好,然而H∞观测器有解的条件是对于任意时刻的Riccati方程:
存在稳定对称解,θ过大将导致式(11) 无解进而导致估计结果失稳,结合式(1)、式(11) 和式(12),观测、 ${I^b}$ 。
-
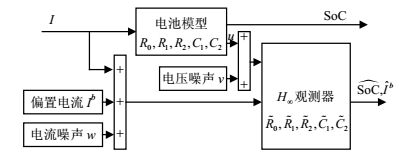
本文首先采用仿真测试,仿真模型如图 1所示。该模型中包含电池模型和H∞观测器两个主要模块,电池模型以三星生产的容量为2.0 Ah的18650三元电池为对象建模,该模型输入工况电流I,输出为电池电压值u和SoC的参考值;H∞观测器输入的电流和电压信号分别为加入了偏置和白噪声的I和加入了白噪声的u,输出为SoC和偏置电流的估计值。电流I采用由不考虑回馈制动的纯电动汽车按标准驾驶循环FTP75运行时产生的电流,模型参数如表 1。

模型参数 数值 Cap/Ah 1.888 6 R0/Ω 0.045 8 R1/Ω 0.052 6 C1/F 8 000.6 R2/Ω 0.033 6 C2/F 777.051 4 τ1=R1C1/s 420.831 56 τ2=R2C2/s 26.108 93 仿真分析从电流偏置、初始SoC偏差、模型偏差和参数适配性角度来分别分析具有偏置电流估计的H∞观测器的SoC估计效果,并和不具有偏置电流估计的H∞观测器进行比较;仿真过程包括15 000 s的重复FTP75驾驶循环和随后的10 000 s停车,前者使电池的SoC变化量在50%左右,后者是为了便于观察没有电流时电池状态估计的收敛情况。H∞观测器的权重参数Q取为单位阵、W和V取值分别为10和1。系统状态的初始值除SoC给定为80%外其余都为0,系统采样周期为1 s。系统的过程噪声是方差为0.000 4的电流白噪声,测量噪声是方差为0.000 01的电压白噪声。
-
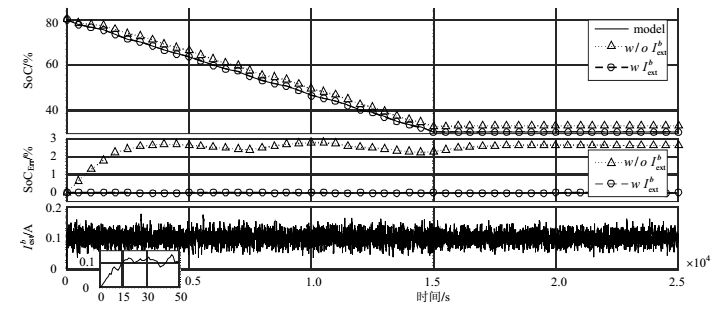
在电池模型和H∞观测器所用模型之间不存在模型偏差的情况下,当系统存在0.1 A的充电偏置电流时,两种H∞观测器的SoC估计结果如图 2所示。从估计效果看,不具有偏置电流估计功能的H∞观测器,其SoC估计效果受偏置电流的影响,存在明显的过程和稳态偏差。反观具有偏置电流估计功能的H∞观测器,尽管受过程噪声和测量噪声的影响该偏置电流估计的结果也具有明显的噪声,但其数学期望值与实际偏置电流值相同,进而使得具有偏置电流估计功能的H∞观测器的估计效果几乎完全不受偏置电流的影响,所以其SoC的估计偏差几乎始终为0。

这种现象可以通过H∞观测器对SoC估计的原理进一步分析,从H∞观测器原理可以看出,SoC的估计可以用式(13) 表示:
式中,K为H∞增益;I为电流采样值,Δy为电压的测量值和模型计算值之差。由于I中含有的偏置及其积分作用,会使不具有偏置电流估计的H∞观测器SoC估计偏差越来越大,该偏差会被KΔy的反馈作用修正,最终产生SoC估计的稳态偏差。而具有偏置电流估计的H∞观测器去偏功能将电流偏置从I消除,故其SoC估计不受偏置电流的影响。
从Ib的估计效果看,在15 s左右的时间后即可收敛到实际值,尽管之后由于过程和测量噪声的影响而存在估计噪声,但其数学期望值与实际电流偏置值相等,因而偏置电流的估计噪声不影响电池的SoC估计。
-
在电池模型和H∞观测器所用模型之间不存在模型偏差,且系统不存在偏置电流的情况下,当H∞观测器的SoC初始值为50%而实际为80%时,两种观测器的SoC估计结果如图 3所示。由于不存在偏置电流,两种H∞观测器的SoC估计都不存在稳态偏差,但从收敛过程看,具有偏置电流估计功能比不具有该功能的H∞观测器明显收敛更快。

从图 3偏置电流Ib的估计效果可以看出,具有偏置电流估计的H∞观测器将SoC的初始偏差部分等效为偏置电流,因而加快了SoC向实际值收敛的速率, 由原来约11 600 s的收敛时间,缩短至约4 600 s。
-
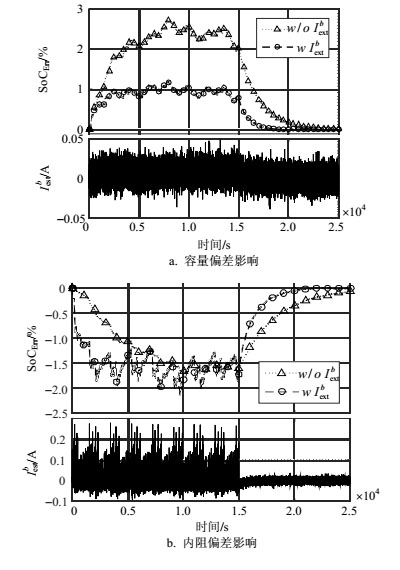
在系统不存在偏置电流和SoC初始值偏差的情况下,当电池模型和H∞观测器所用模型之间存在模型偏差时,两种H∞观测器的SoC估计结果如图 4所示。图 4a为电池模型容量为1.5 Ah、H∞观测器所用模型容量为2.0 Ah时的容量偏差对估计效果的影响,图 4b为电池模型内阻(R0)为0.1 Ω、H∞观测器所用模型内阻为0.045 8 Ω时对估计效果的影响。

从图 4可以发现:具有偏置电流估计的观测器对容量偏差的鲁棒性明显强于没有该功能的H∞观测器,但另一方面容量偏差并没有使具有偏置电流估计的H∞观测器的偏置电流估计出现明显偏差,这说明H∞观测器能够将容量偏差和电流偏置解耦,可进一步做电池容量估计进而做电池健康状态估计。从内阻偏差对SoC估计效果的影响看,具有偏置电流估计的H∞观测器并没有比没有该功能的H∞观测器取得更好的估计效果,两者SoC估计偏差差不多,而且其偏置电流的估计也明显受到内阻偏差的影响而不再是零均值,这说明H∞观测器难以将内阻偏差和电流偏置解耦。
-
如果观测器的估计效果对其参数值很敏感,则意味着该观测器在实际应用时容易出现调试困难或工作不稳定现象,因此可工程化的观测器其参数可用范围越宽越好,这就是参数适配性的问题。H∞观测器的关键参数有q、Q、W和V,其中θ被优化为3.0×10-5,Q固定为单位阵,这样可以通过改变W和V的参数值来观察观测器的参数适配性。从H∞观测器是一种增强鲁棒性的卡尔曼观测器的角度看,其W与V参数分别和卡尔曼观测器的过程噪声方差与测量噪声方差有类似的效应,即W/V的比值越大则观测器越信任测量值、比值越小则越信任预测值。因此为便于观察,将V参数值固定为1,通过改变W的值来观察对观测器的影响。
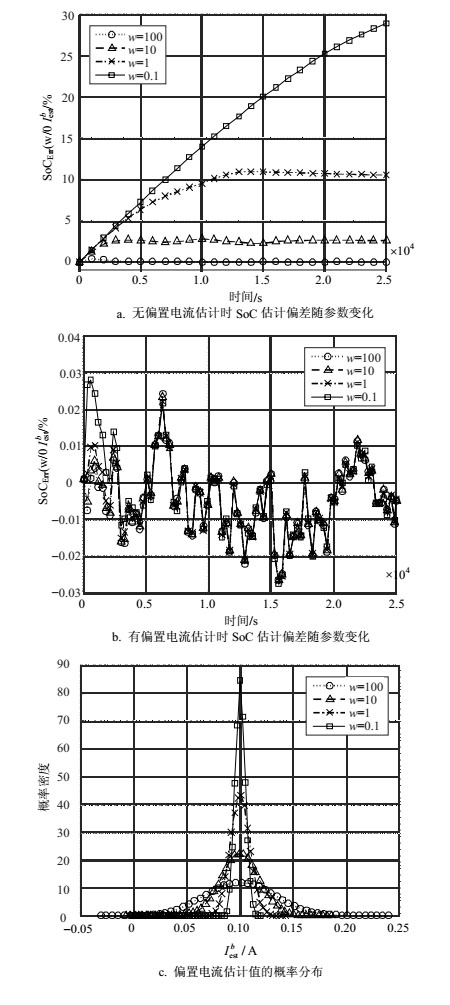
在电池模型与H∞观测器所用模型之间不存在模型偏差和初始SoC偏差的情况下,当系统存在0.1 A的充电偏置电流时,两种H∞观测器SoC估计效果对其关键参数的适配性如图 5所示。

图 5说明随着W的减小,观测器越来越信任预测值,电压测量值的反馈作用越来越弱,偏置电流使没有偏置电流估计功能的H∞观测器SoC估计的稳态偏差越来越大(见图 5a);对于具有偏置电流估计功能的H∞观测器而言则不受影响,且其偏置电流估计值的噪声随W的减小而减小(见图 5c),但中心值都能够稳定在实际偏置电流值,其SoC估计偏差几乎不受W变化的影响而始终很小(见图 5b),说明其具有很强的参数适配性。
3.1. 偏置电流对H∞观测器的影响
3.2. H∞观测器对初始SoC偏差处理效果

3.3. H∞观测器对模型偏差的鲁棒性
3.4. H∞观测器的参数适配性
-
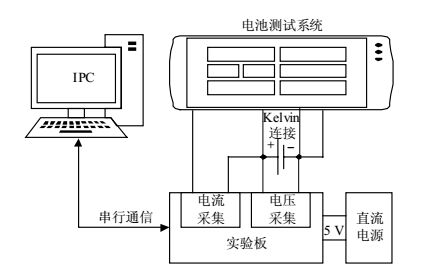
实验平台由Neware生产的BTS、电池实验板和上位机组成。BTS设备可以高精度地采集电池的电压和电流信号,因此可以看作是其实际值并作为基准数据,用于分析本文研究方法的性能。电池实验板是自行开发的,用于运行本文的两种H∞估计算法。该板自行采集电池电压和电流数据,电流数据采集通过内置在电路版的分流器获得;而电池电压采集则用内置的电压采集电路进行,并与电池采用Kelvin连接提高采集精度。该电路板对所采集电流和电压信号并没有对其进行偏差校正和滤波处理,因此采集的信号会存在较为明显的噪声和偏置。为保证本文方法的通用性,实验测试用的电池采用与建模时所用的电池不同,是同型号的另外一支已经使用多年的旧电池,为的是使算法的模型与实际电池存在一定的模型偏差。电池测试设备与实验电路板均通过串口与上位机通信进行数据记录和分析。实验装置电路连接示意图如图 6所示,整个实验装置如图 7所示。


实验过程中,电池的初始SoC采用如下步骤获得:首先对电池进行完整充电;然后放电至标称容量(2.0 Ah)的80%,即放电0.4 Ah,目的是使电池的实际初始SoC为80%左右;最后将电池完全静置后,根据其电池开路电压利用OCV(SoC)表进行插值。由于该电池为旧电池,容量已有所衰减,所获得的电池实际初始SoC为78.3%。电池实验电路板所用H∞观测器算法参数与仿真设置相同,所用电池模型沿用表 1的参数。
实验数据和结果如图 8所示。从电池的电压和电流数据可以看出,相比于电池测试系统测得的真实值,实验电路板测得的数据包含有明显的噪声和偏置,其中电压信号的噪声方差约为0.000 1,偏置约为7.5 mV;电流信号的噪声方差约为0.004,偏置约为0.3 A。电流信号的噪声和偏置明显高于电压信号,是因为两者信号处理电路不同。电压信号范围为2.0~4.5 V,可以直接采集;而电流信号由于采用最大输出为75 mV的分流器,需要采用线性光耦隔离并放大,因此其噪声和偏置会更明显。在工程应用中,两种信号都需进行特殊处理来降低噪声和偏置,因此该实验的设置相当于模拟了比较恶劣的应用情况。

从实验的SoC估计效果看,即使在电压和电流信号具有明显的噪声和偏置的情况下,具有偏置电流估计功能的H∞观测器也明显优于不具有该功能的H∞观测器。前者的SoC估计偏差,包含SoC的初始偏差在内,整个测试过成中不超过2%,最大值为约为1.8%,稳态值约为0.9%,而后者的SoC偏差最大值可达约11.3%,稳态值约为8.3%,偏置电流的积分作用使不具有偏置电流估计功能的H∞观测器的SoC估计偏差显著。具有偏置电流估计功能的H∞观测器其偏置电流估计均值约为0.309 A,与0.3 A的实际值非常接近,说明在存在模型偏差和信号噪声的实际情况下,该观测器具有很好的去偏能力和鲁棒性。具有偏置电流估计功能的H∞观测器SoC估计的稳态误差,是由电压信号的偏置造成的。工程应用中电压信号的采集精度通常可达mV级,比如LTC6804芯片的最大电压采集偏差为1.2 mV,对于具有偏置电流估计功能的H∞观测器而言,7.5 mV的电压偏置造成约0.9%的SoC估计偏差,可以忽略工程应用中的电压偏置对SoC估计精度的影响。


-
本文利用电路模型对电池进行建模,并采用H∞观测器对电池的SoC状态进行估计。为了能够有效处理电流采样中存在偏置问题,将偏置电流作为系统状态之一进行估计,并将具有该偏置电流估计功能的H∞观测器,与不具有该功能的H∞观测器进行比较。研究结果发现,前者具有如下优势:1) 不仅能够准确估计电流偏置值,而且在存在初始SoC偏差和模型偏差时,能够有效提高SoC估计精度;2) 能够使H∞观测器具有很强的参数适配性。实际的电池实验验证了其有效性。

 DownLoad:
DownLoad: