 ISSN
ISSN 





-
近年来,工业机器人已经被广泛使用在许多工厂自动化领域。在机器人的众多执行任务中,与环境相接触的任务必不可少。机器人的接触任务不仅需要位置控制,而且也需要对接触力进行控制,这样才能保证机器人与环境之间的安全工作模式。以往,许多学者针对机器人稳定接触任务问题提出了力控制方法[1-2]。其中,阻抗控制和位置/力混合控制是机器人力控制的两个主要策略[3-4]。
通常的工业机器人具备精确且鲁棒性高的位置控制器。基于这一发展现状,以位置控制器作为控制内环的基于位置的阻抗控制策略(position based impedance control, PBIC)被首先应用于执行交互任务的工业机器人[5]。该方法不需要修改任何传统的位置控制器,能够完成系统由自由运动到接触运动的平稳转换。然而,当接触环境参数超出控制器设计阶段所预估值以外的情况,PBIC就很可能不能保证接触任务的稳定性[6]。在这种情况下,由于系统的稳定性与外界环境参数密切相关,基于模型鲁棒控制方法的阻抗控制机器人必须对阻抗控制中的参数进行重新设计。为防止环境参数变化引起潜在的不稳定问题,针对未知不确定的环境参数离线估计方法、文献[7-8]提出在线识别方法以及自适应阻抗控制等方法。同时,基于神经网络和模糊控制和的智能力控制算法与传统控制方法结合,补充了其自身控制方法的不足,提高了系统性能[9]。然而,这些控制算法难以解决环境参数巨幅变化的情况。
本文提出一种新的自适应边界能量(EBM)控制算法,该方法首先将工业机器人由位置控制模式变为基于位置的阻抗控制(PBIC)模式,然后根据实验或经验所得环境参数范围设计PBIC控制器。在通常情况下,由于实验和经验的限制,这些环境参数有可能是不确定参数或变量,而自适应边界能量法通过在线估计控制参数来提高性能。同时,当环境参数在初始预估的范围内时,这种自适应边界能量法能够保留最初的阻抗控制性能。该方法使用基于位置控制的阻抗模式完成接触力任务,并能保证具有鲁棒性的稳定接触,尤其适用于环境刚度巨幅变化的场合。
HTML
-
气液联控伺服系统是基于克服或者补偿气体介质的根本缺点,将液体介质引入到常规气压伺服系统中,并进行控制而构成的一种新型的气、液介质复合控制系统[10]。试验证明,这种气液联控系统既能够保持气压伺服系统的快速性和柔顺性等特点,又能够提高定位精度和定位刚度,提高系统的低速性能[11]。该系统具有刚柔兼并的优点,尤其适合应用于进行接触任务的机器人系统中,因此,本文以该系统为例验证自适应EBM算法的有效性。
气液联控柔顺力控制系统结构如图 1所示,该系统可以划分成两部分。左侧是气液联控伺服系统,由气液串联缸、负载、两位三通电磁阀、位移传感器、力传感器及其驱动电路等组成。右侧为环境模拟系统,由气缸、位移传感器、两位三通电磁阀及其驱动电路等组成。

-
选取状态向量x=[x1 x2 x3],其中x1和x2分别是负载M的位移和速度;x3是气液缸的加载力。则(pneumatic hydraulic combination control, PHCC),系统在自由运动阶段的状态方程为:
式中,${F_S} = {F_h} + {F_{{\rm{other}}}}$;${F_h} = \frac{{A_s^3{{\dot x}^2}\rho }}{{{\rm{2}}\tau _L^2C_d^2{A^2}}}$是液体阻尼力;Fother是摩擦力和系统弹性力等未建模部件的干扰力总和;τL是液压高速开关阀占空比;Cd是流量系数;A是阀口面积;As是液压腔活塞有效面积;ρ是液体密度;M(t)是时变有效载荷的质量;F(x, t)和G(x, t)的具体公式如下:
式中,P1和P2分别是气缸1腔和2腔的压力;A1和A2分别是气缸1腔和2腔活塞面积;x3可由关系式${x_3} = {P_1}{A_1}-{P_2}{A_2}-{P_a}{A_w}$表示;Pa是大气压;Aw是活塞杆的横截面面积;k是气体等熵绝热指数;R是气体常量;T1、T2和TS分别是气缸1腔、2腔和气源的温度;L是气缸有效伸缩长度;Ps是气源压力;γia和γib是修改因子;Aom是孔的最大区域面积;umax是比例方向控制阀的最大控制信号量。
1.1. 系统描述
1.2. PHCC系统动力学建模
-
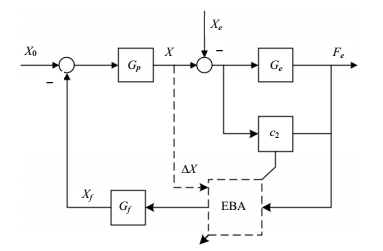
对于通过位置控制器执行约束运动任务的机器人来说,阻抗控制具有高鲁棒性和高精度的优势。传统的控制方法通过跟踪输入参考位置信号实现接触力的控制,而阻抗控制通过调节执行机构的机械阻抗实现力控制。表明阻抗控制可以将机器人的初始阻抗变化为目标阻抗,从而降低接触过程中位置控制机器人的高阻抗,因此可以得到与外界环境的稳定交互。图 2是一个典型形式的基于位置的阻抗控制(PBIC)结构图,其中X0是标称位置;Xe是环境位置;Gp是机器人位置反馈回路的传递函数;Ge代表环境的传递函数。

传递函数Gf可表示如下:
式中,${\tilde G_p}$是机器人位置控制传递函数${G_p}$的最小相位估计函数;${G_t}$是目标阻抗函数,它是由目标质量${M_t}$、目标阻尼${B_t}$、目标刚度${K_t}$构成的二阶函数。为确保被控系统的稳定接触,在进行PBIC控制时,必须满足以下条件[12]:
式中,目标阻尼系数${\xi _t} = {B_t}/2\sqrt {{M_t}{K_t}} $;目标刚度系数$\kappa = {K_e}/{K_t} \gg 1$;${K_e}$是环境刚度。因此,当实际环境刚度超出设计之初预估的范围,系统就可能出现不稳定的现象。但是,如果将环境刚度幅值范围加大,系统的性能将降低。

-
阻抗控制下,单自由度机械手受力情况如图 3所示。

在该控制结构下,被控系统的动力学可表示为:
式中,假定传递函数${G_p}$被有效去除,${x_i}$是机械手的实际位移;${\upsilon _i} = {\dot x_i}$。
图 4为基于阻抗控制的自适应EBM网络能量流布示意图。

如果在任意时间段[0, t]内,端口吸收的净能量大于或等于在相同时间段内净能量存储的增加量,那么这个单端口网络系统就是被动的,即有:
式中,$V( \cdot )$是系统从网络中吸收的能量。
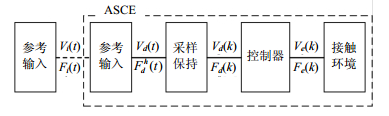
为了获得一个稳定的交互控制算法,ASCE系统可以分成两个子系统:导纳子系统($1/Z_t^{-1}$)和SCE子系统。
首先,在0≤t<nT的时间内,流入导纳子系统的净能量为:
式中,T是外环采样周期;离散值${E_A}[n]$等于连续值${E_A}[nT]$,n是非负整数。
其次,在0≤t<nT的时间段内,流入SCE子系统的净能量为:
由式(7)~式(8)可知,如果下式成立,则整个机器人环境交互系统为被动系统:
将式(4)带入式(7),则有:
式中,$\int_{{\rm{ }}0}^{{\rm{ }}nT} {{B_t}} \upsilon _d^2(t){\rm{d}}t$代表子系统导纳的耗散能量。
在式(10)中,设${V_{{\rm{ASCE}}}} = {V_A} + {V_{{\rm{SCE}}}}$,则式(9)可改写为:
由于采样保持子系统中没有存储能量,因此${V_{{\rm{SCE}}}} = {V_{{\rm{CE}}}}$。
利用Cauchy–Schwarz不等式,有:
式(12)可变为:
将式(13)分成两个部分,可以定义两个条件如下:
1)
2)
式(13)能够成立的充分条件是同时满足条件1)和条件2)。
接触力的自适应EBM控制递归公式为:
式中,有:
式中,${F_e}[n]$是由力传感器测量得到的接触力。在式(16)中,当$\Delta {x_d}[n] = 0$时,表明机械臂停止运动,控制力${F_d}[n]$保持定值,这与实际情况相符合。
图 5为自适应EBM算法的整体框图。

为了同时满足条件1)和条件2),$\beta [n]$必须满足以下边界条件规则:
① 如果$\beta [n] > {\beta _{\max }}[n]$,则$\beta [n] = {\beta _{\max }}[n]$;
② 如果$\beta [n] < {\beta _{\max }}[n]$,则$\beta [n] = {\beta _{\min }}[n]$。
式中,${\beta _{\max }}[n] = \min ({c_1}, \, {\gamma _{\max }}[n])$;${\beta _{\min }}[n] = {\gamma _{\min }}[n]$。
式中,${c_1}$和${c_2}$是影响系统稳定性和性能的两个重要参数,并且是满足${c_1} \ge {c_2}$的正参数。
由式(14)和式(16)可得:
因此,如果对于所有k都满足下式:$\beta [k + 1] \le {c_1} \le \frac{{{B_t}}}{T}$,则式(20)成立。
对于固定刚度的环境,${c_2}$可选取如下:
根据环境刚度的大小$({K_e})$和阻抗控制机器人的能量耗散能力(c1),可归纳为以下两种情况:
1) 假设${c_1} \ge {K_e}$,则${c_2}$可设为环境刚度${K_e}$;
2) 假设${c_1} \le {K_e}$,则${c_2}$必须设为与${c_1}$相等。


-
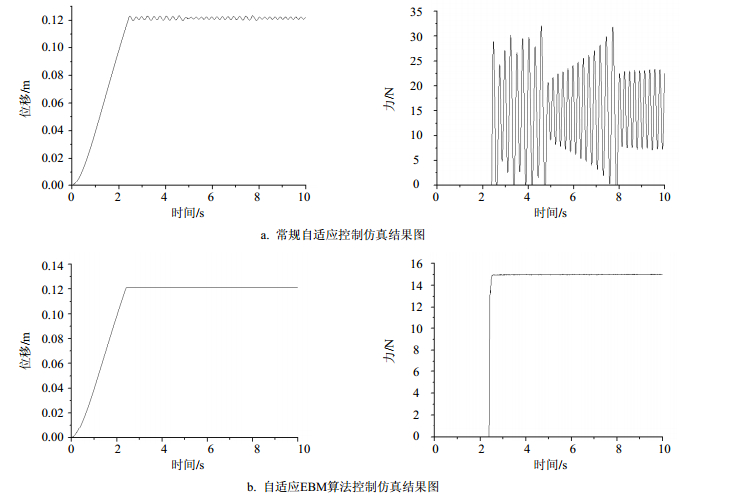
本文针对阻抗控制中环境预估不精准对系统稳定性造成较坏影响的问题,提出一种自适应EBM控制算法。以气液柔顺力控制系统为例,进行了仿真研究。仿真结果表明,所提控制策略能够较好的实现系统的柔顺力控制。在保证系统具备良好动态性能的基础上,解决了当环境参数预估不准确情况下柔顺力控制的稳定性问题

 DownLoad:
DownLoad: