 ISSN
ISSN 





-
自中科院系统所在20世纪80年代末期开创了自抗扰控制技术的相关理论研究,并于1998年正式提出自抗扰控制器(ADRC)的概念以来[1],自抗扰控制器已经在很多领域获得了成功的应用。近年来,在交流伺服驱动控制方向上也出现了相关的一些研究工作。这些工作要么致力于对传统交流伺服三环控制结构基于经典ADRC技术进行不同形式的改造[2-9],要么是通过对电机模型进行部分辨识与补偿或采用无参数整定的控制策略等方式对ADRC进行适度改进,再应用于交流伺服控制[10-11]。以上各项研究中所构建的交流伺服控制系统无一例外地仅将电机本体作为控制对象,而对于结构更复杂且惯量更大的机电系统均未涉及。另外,ADRC在交流伺服系统中的应用研究目前仍然停留在仿真实验或算法实现的探讨层面[12-13],工程实现的实际案例极少。
本文基于一种实际的电机试验设备,为了有效抑制其三坐标自动定位系统中的显著扰动,构建了包含伺服电机、伺服驱动器以及复杂机械传动环节的一种全闭环位置伺服机电控制系统,并且在系统位置外环控制器中植入先进的ADRC控制算法。在动力学建模与分析的基础上,通过仿真对比分析及相应的测试实验,验证了该全闭环位置伺服控制结构在系统中抑制负载外扰及阻抗内扰的有效性。
HTML
-
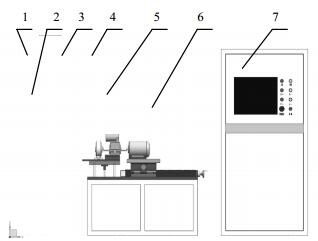
图 1为某型电机试验设备的示意图,该设备的主体之一为一种三坐标自动定位台架,台架具有X、Y、Z三个方向的运动自由度,且每个方向都采用手轮和PMSM交流伺服控制驱动的方式,以“PC+运动控制板卡”作为上位控制器。

在试验台架的X、Y、Z三轴系统中,Z轴升降系统的运动状况最为特殊。一方面,升降平台作上、下运动时其重力荷载造成了Z轴驱动系统的外负载显著不对称,因此当电机驱动参数一定时,即使荷重恒定,也相当于对驱动系统施加了一个恒值负载外扰,造成Z轴升降系统上、下运行时的被控运动参量呈现明显差异,在X、Y、Z三轴作空间曲线的插补运动时,由此带来的位置偏差不容忽视。另一方面,Z轴机械传动部分的环节相对较多并且采用了四杆导向结构,由于制造及装配误差的缘故,安装平台在Z向运动过程中的摩擦力作为内扰因素不仅显著且极不稳定。此外,在持续工作状况下,驱动器的不稳定、电机阻抗的波动等等都会以内扰的形式对系统伺服性能产生负面影响。鉴于此,以下就以Z轴系统作为典型对象来展开讨论。Z轴机械传动模型如图 2示。图中,i为蜗轮蜗杆传动比;Tmi为伺服电机输出转矩;θmi为伺服电机输出转角;J1为轴Ⅰ转动惯量;J2为轴Ⅱ转动惯量;K1为轴Ⅰ扭转刚度;K2为轴Ⅱ扭转刚度;K3为轴Ⅲ直线刚度;B为安装平台运动的速度阻尼系数;M为轴Ⅲ总质量。

如丝杠导程为l,安装台直线位移S折算到电机轴上的等效转角为$\mathit{\Phi } {\rm{ = }}\frac{{i2{\rm{ \mathsf{ π} }}S}}{l} $。假定作用于轴Ⅱ的扭矩为T2,由荷重产生的力矩为TL,则由平衡关系可得下列等式:
式(1)中,
由式(2)和式(3),得到Z轴系统的运动方程为:
式中,$ {J^*} = \left\{ {i{J_1} + [{J_2} + M{{\left( {{l \mathord{\left/ {\vphantom {l {2\pi }}} \right. } {2\pi }}} \right)}^2}]/i} \right\}$。
式(4)中的荷重等效负载转矩TL之前的“∓”号,在安装台上升时取“-”号,下降时取“+”号,在式(3)中情况恰好相反,该转矩大小可用下式估算:
式中,g为重力加速度;η为丝杆传动效率;μ0为预压螺母内摩擦系数;F0为预压荷重。

-
试验台X、Y、Z三轴电气传动环节均采用永磁同步电动机(PMSM)矢量控制驱动的方式,系统采用流行的电流、速度、位置三闭环串级控制模式。如系统的控制结构采用半闭环,则位置信号采自伺服电机编码器而非终端工作台,故系统机械传动误差难以补偿,机械传动环节的各种扰动也不能得到有效抑制。鉴于此,以试验台为对象,在其X、Y、Z三轴驱动、传动系统中引入全闭环位置伺服控制结构,即电流、速度双闭环串级控制功能由伺服电动机、伺服驱动器完成,然后将电流、速度环嵌入位置外环,位置信号由安装在工作台上的光栅尺检测反馈。
目前工程应用中的交流伺服三环控制系统的速度环调节器、电流环调节器通常都采用PI调节器,而位置环则多用P或PID调节器。为了有效抑制系统扰动对位置精度的影响,在构造的全闭环系统中,速度环、电流环仍然采用PI调节器,位置外环调节器则设计成ADRC。
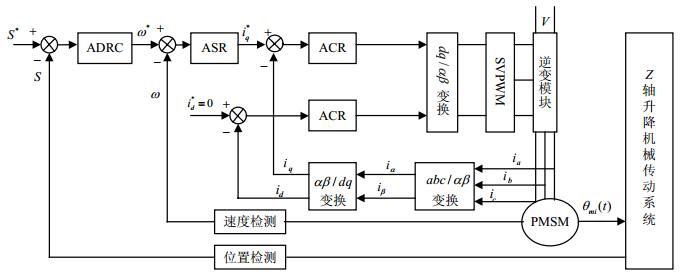
以Z轴为对象,改进后的交流伺服驱动矢量控制结构如图 3示,结合式(4),得到Z轴升降系统三环位置伺服全闭环控制框图如图 4,其中${G_{JX}}(s) = \mathit{\Phi } (s)/{\theta _{mi}}(s) $为由式(1)~式(3)消去Tmi、T2所得的传递函数,KVP、KiP为速度、电流比例增益系数,KVI、KiI为速度、电流积分增益系数,TPWM为逆变器工作周期,KPWM为逆变器比例放大系数,L为伺服电机定子电感,R 为伺服电机定子电阻,λe为转矩系数,Ke为电动势系数,S*为位置(位移)给定,S为位置(位移)检测信号。



-
设有一非线性系统:
式中,$ f({x_1}, {x_2}, \cdots, {x_n})$为未知函数;$ w(t)$为未知外扰;u为系统控制量;b为系统控制增益。
对以上系统式(6),ADRC控制算法最一般的数学模型如下[14-15]:
1) 系统的n阶跟踪微分器为:
式中,z11是对系统给定μ(t)的跟踪值;R为跟踪微分器的信号输入界限,即$ \mu (t) < R$;${\dot z_{1k}}\, (k = 2, 3, \cdots, n) $为μ(t)跟踪值的各阶微分值;$ f({z_{11}}-\mu (t)$,$ {z_{12}}/R, \cdots, {z_{1n}}/R)$为一非线性函数。
2) 系统的n+1阶扩张状态观测器为:
式中,z21为y的跟踪值;${\dot z_{2k}}(k = 2, 3, \cdots, n) $为y的跟踪值的各阶微分值;而${\dot z_{2n + 1}} $为对系统外部扰动与未建模部分的实时估计;$ {g_k}( \cdot )\;(k = 1, 2, \cdots, n + 1)$为非线性函数。目前控制工程中使用的非线性函数有多种,多数时候选用以下形式:
式中,α为非线性因子;δ为滤波因子。
3) 针对系统的非线性状态误差反馈控制律(nonlinear state error feed back, NLSEF)为:
式中,$ {\varepsilon _k} = {z_{1k}}-{z_{2k}}, {\rm{ }}k = 1, 2, \cdots, n$;${\beta _k}\;, \;{\alpha _k}\, , {\delta _k} $分别为误差反馈增益系数、非线性反馈因子、非线性系统滤波因子,通常$0 < {\alpha _k} < 1 $;$ {\delta _1} = {\delta _2} = \cdots = {\delta _n}$。
-
令v为Z轴升降台直线运动速度,当升降台位移量为S时,显然$ {\rm{d}}S/{\rm{d}}t = v$。由于各种扰动的影响而引起的速度波动量为:
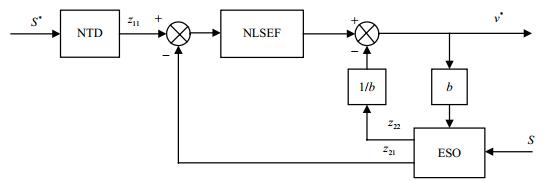
由前述自抗扰控制器的特性,如在位置环中引入ADRC,则不需要知道非线性因素$ w(t)$的具体形式,而仅需要通过ADRC对此时变非线性扰动进行实时估计即可。根据Z轴系统的运动方程式(4)及式(7)~式(10),构制出Z轴位置环ADRC的一种低阶模型,其结构框图如图 5所示。

在低阶情况下,跟踪微分器NTD是可以省掉的,因此可得简化的ADRC模型如下:
二阶非线性扩张状态观测器:
非线性状态误差反馈控制律:
式中,S*为Z轴升降的位置给定;S为实际检测到的位置信号;α01、α02、α1为非线性因子;δ01、δ02、δ1为滤波因子;z21为对检测反馈位置信号的跟踪值;ε01为位置踪误差;z22为位置环的扰动观测值;控制输出u=v*,v*实际上是速度环的给定值。
3.1. ADRC的一般数学模型
3.2. 一种简化的位置环ADRC
-
为了验证位置环采用ADRC的效果,在MATLAB/Simulink环境下对Z轴系统的全闭环位置伺服性能进行仿真分析。
仿真参数:伺服电机以1 000 W台达低惯量电机为参照,相关参数取定为定子电感L = 5.7 mH,直阻R = 0.897 Ω;转子惯量$ {J_d} = 2.62 \times {10^{-4}}$ kg·m2,转子磁链$ {\psi _f} \approx 0.015$ Wb;Z轴系统总质量(丝杆+安装板+磁粉制动器+传感器)$ M \approx 40$ kg;$ l = 0.008$ m,i = 8,TPWM = 0.000 17,KPWM = 7.8,Ke = 2.7, λe = 0.75,B = 0.05。设定三环均为单位反馈,即反馈系数$ {K_i} = {K_\omega } = {K_P} = 1$,系统速度环、电流环均采用PI调节控制。
-
给定Z轴目标位置,电机在满负载额定转矩下上电起动,正转、反转驱动安装平台上升、下降运行到达给定位置,为了考察升降台荷重作为一种恒值负载外扰对Z轴系统位置跟踪动态性能的影响,针对以上过程进行仿真实验。
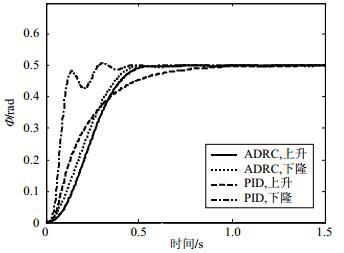
以等效转角Φ作为Z轴位置给定,取Φ =0.5 rad,位置环采用PID调节器时,控制器参数整定如下:位置环增益KPP = 5,KPI = 0.005,KPD = 0.04,速度环增益KVP = 0.25,KVI = 30,电流环增益KiP = 27,KiI = 800。位置环采用ADRC时,控制器参数整定如下:ESO:$ {\alpha _{01}}{\rm{ = }}{\alpha _{02}}{\rm{ = }}0.5$,${\delta _{01}}{\rm{ = }}{\delta _{02}}{\rm{ = }}0.05 $,${\beta _{01}}{\rm{ = 80}} $,$ {\beta _{02}}{\rm{ = 5 5}}00$;NLSEF:${\alpha _1}{\rm{ = }}0.5 $,${\delta _1}{\rm{ = }}0.01 $,$ {\beta _1}{\rm{ = }}100$,速度环、电流环参数与PID调节时一致。仿真输出如图 6所示。为便于将多条曲线在同一坐标系下直观比较,仿真输出时,上升、下降位移值均取为正值。

从位置跟踪曲线可以看出,在相同荷重扰动下,位置环无论是采用PID调节器或还是ADRC调节器,上升过程均慢于相应下降过程,这是正常的结果。但是采用ADRC时升降差异很小且均无明显超调,而采用PID调节器时,上升、下降过程出现显著差异,在下降时超调较大且伴随冲击振荡。
-
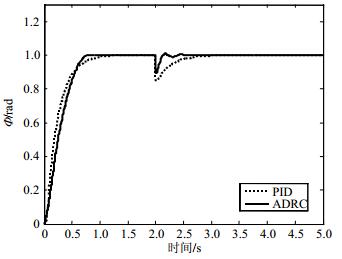
给定Z轴目标位置,电机满负载上电起动正转,升降台上升到达目标位置,为了考察系统对其内部扰动的抑制能力及位置伺服的鲁棒特性,在对系统突加阻抗扰动的情形下进行仿真实验。
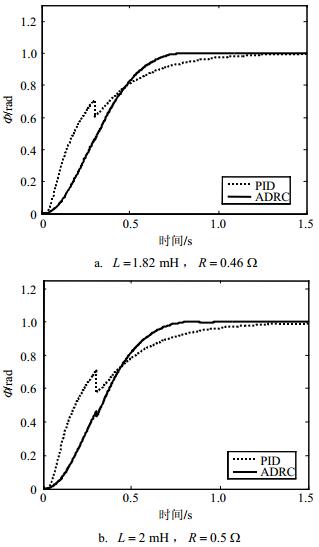
仿真实验分两种情形完成,情形1:平台负重上升达到目标位置系统进入稳态,约2 s后将三相对称阻抗串入伺服电机定子。情形2:在平台上升过程中将阻抗串入伺服电机定子。每个扰动线圈阻抗参数取为$L = 1.82~{\rm{ mH}} $,$R = 0.46~{\rm{ }}\Omega $,控制器参数整定同4.1节。两种情形下平台位置变动与调整恢复的仿真输出如图 7、图 8a所示。仿真结果显示,对于相同的阻抗扰动,第一种情况下,系统的稳态位置保持能力ADRC略优于PID,但差异不显著,两种调节方式都有比较好的抑抗扰能力,这与扰动发生在内环有一定关系。第二种情况下,ADRC调节的系统其上升过程几乎不受影响,PID调节的系统则有较明显波动,表明升降台运动惯性对扰动有一定的消解作用,也显示ADRC具有更强的动态抑扰能力。


4.1. 荷重扰动下的位置伺服性能仿真
4.2. 突加阻抗扰动时的位置伺服性能仿真
-
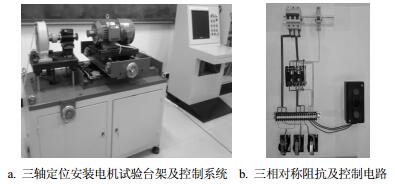
测试实验基于一套工业级的电机试验设备,实物如图 9所示。系统采用研华工控机(IPC-7132)及雷泰DMC5480四轴运动控制卡作上位控制器,试验台架的X、Y、Z各轴均以台达伺服电机及驱动器作为驱动单元,其中Z轴伺服电机为1 000 W,型号为ECMA-C-0910ES,配套驱动器型号为ASD-B2-1021,各轴工作台装光栅尺(KA-300-5041A-370-9-3)检测反馈位置信号到上位机运动控制板卡完成数据采集与显示。另外,用于对被测试电机加载的磁粉制动器(FZ50.J/Y)以及用于检测速度、转矩的传感器(ZJ-20A)均安装在Z轴升降平台上。

当运动控制板卡以速度接线模式与伺服驱动器连接,伺服驱动器与电机设置在速度控制模式,系统则搭建成三环串级全闭环控制结构,其中电流、速度闭环控制调节由驱动器完成,位置外环控制调节由上位控制器完成。另外,在win7环境下用C#语言基于板卡库函数编制一套应用软件,籍此可对三轴设定运动控制参数,能实现直线插补、圆弧插补、单轴控制,实时采集各轴位置信号并实现时间、位移数据列表和相应的图形曲线显示。测试表明全闭环位置PID与ADRC控制算法在中、低速下作单轴点位控制时能较理想地实现。
-
以Z轴系统为对象在试验设备上完成了恒定负载(荷重)扰动下的位置跟踪动态性能测试及电气阻抗扰动下的稳态位置保持性能测试。
实验1:分别在位置环采用ADRC、PID两种控制模式,伺服电机上电起动作正转、反转运行,平台在荷重状况下上升和下降运动到达指令位置,平台运动过程中启动位移检测自动数据采集功能,实时检测其上升、下降位移数据及位置偏差。测控过程基于专门研发的应用软件,通过上位机控制界面进行参数设置并通过界面相关功能按钮操作完成。
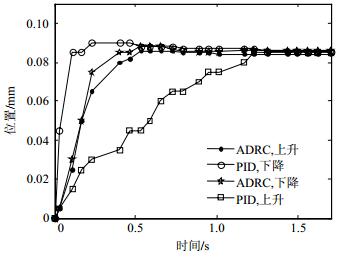
实验相关参数如下:Z轴荷重(磁粉制动器+传感器+安装板)35 kgf;上升、下降位移0.085 mm(等效转角$ \mathit{\Phi } \approx 0.5$ rad);驱动参数设置为:最大速度10 000脉冲/s,加速度3 000脉冲/s2,减速度3 000脉冲/s2,脉冲当量0.000 5 mm,位置检测的数据采样频率20次/s。根据实测数据所得位移曲线如图 10。

实验2:分别在ADRC、PID两种控制模式下,伺服电机上电起动正转运行,启动位移检测数据采集功能,平台荷重上升到达指令位置后约2 s将三相对称阻抗通过手动控制串入伺服电机定子,测试平台位置变动与恢复状况。
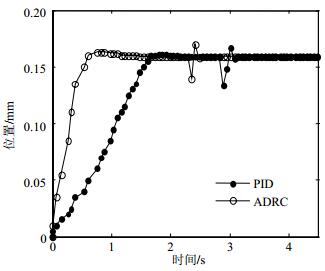
实验相关参数如下:上升位移0.16 mm(等效转角$\mathit{\Phi } \approx 1 $ rad);3个阻抗线圈平均电感$ L \approx 1.85$ mH,平均直阻$R \approx 0.53~{\rm{ }}\Omega $;其余参数同实验1。根据实测数据所得位移曲线如图 11。

-
位置跟踪实验测试数据显示,位置环采用ADRC调节时,上升时间为0.452 s,下降时间为0.373 s,升、降时差仅0.079 s,升、降过程同时刻最大位置差异0.011 mm,下降超调量为3.53%。采用PID调节时,上升时间为1.065 s,下降时间为0.18 s,升、降时差高达0.885 s,是ADRC调节时的11.2倍,升、降过程同时刻最大位置差异0.068 mm,是ADRC调节时的6.18倍,下降超调量达到5.65%。由此显见,在有效消弭荷重扰动引起的升、降运动差异的功能方面,ADRC调节控制强于PID调节控制,这和仿真所得定性结论是相吻合的。
稳态时突加阻抗内扰的实验测试数据显示,ADRC调节时位置最大波动幅度为-12.5%,调整恢复时间为0.264 s,PID调节时位置最大波动幅度为-16.8%,调整恢复时间为0.379 s,两种控制方式差异不显著。以上结果说明,对于突加阻抗内扰,位置环采用ADRC控制与PID控制时的稳态抑扰能力相当,这也与仿真结果一致。
5.1. 实验系统简介
5.2. 实验方法
5.3. 实验结果分析
-
基于对一种特殊的电机试验设备的分析研究以及相应的理论仿真和测试实验,可以得到如下结论:
1) 一个交流伺服驱动的位置伺服系统如存在恒定外负载扰动,位置环采用ADRC控制时系统的动态响应较为稳定,抗扰效果明显优于传统的PID控制,并且有很好的抑制超调的能力,这对大惯量、长传动链系统十分有利。对于非重力荷载情形下的单向恒值外负载扰动此结论同样适用。
2) 对于系统的内部扰动,如发生在内环的电气阻抗波动导致的位置偏离,在三环串级控制模式下,ADRC和PID调节控制时的稳态抑扰能力差别较小,这表明在多环串级控制系统中内环辅控调节对内扰的抑制作用是积极有效的,是这类控制结构的某种优势,不过动态情形下抑制内扰的能力PID逊色于ADRC。

 DownLoad:
DownLoad: