 ISSN
ISSN 

Fast Matching Selection Lgorithm of UAV Platform Based on Task Demand of Transmission Line Inspection
-
摘要: 近年来,无人机在电力行业输电线路巡检方面得到广泛应用,输电线路无人机自动化巡检技术因其独特的优势受到国内外研究机构及相关部门的广泛关注。但随着巡检任务需求的快速增长,以及市面上所能选择的无人机平台及其载荷类型越来越多,导致快速完成无人机平台选型的难度增加,通常需要耗费大量人力完成筛选匹配工作。因此,根据任务需求,如何快速可靠地完成无人机平台选型是输电线路自动化巡检研究领域需要重点解决的问题之一。为了解决该问题,该文提出了3层结构的基于异构神经网络的快速匹配选型模型。在模型第1层,提出改进型的独热向量算法,完成了巡检任务相关因素的数值化,并输出任务需求矩阵;在模型第2层,提出基于时间递归神经网络(LSTM)神经网络结构的参数指标生成模型,根据任务需求矩阵生成所需的载荷相应参数;在模型第3层,提出了基于决策树网络的匹配模型,根据生成的参数指标确定最终的无人机平台参数和型号。最后,通过真实选型案例数据,验证了该模型算法的有效性。Abstract: In recent years, unmanned aerial vehicle (UAV) is widely used in power industry transmission line inspection. Power transmission lines UAV automation inspection technology has been attracted extensive attention from domestic and foreign research institutions because of its unique advantages. However, the rapid growth of inspection task demand and more and more choices for UAV platforms make it difficult to complete the UAV platform selection rapidly, which usually cost a lot of manpower. For solving this problem, this paper proposes a three-phase framework based on various types neural networks for rapid selection. In the first phase, the adjusted one-hot vector algorithm is presented to transform the description of inspection task into task matrix; in the second phase, the relationship between task matrix and load parameters is constructed by using long short term memory (LSTM) neural network; in the last phase, the UAV platform selection is achieved with decision tree network. Finally, the real-world data are used to validate the effectiveness of the proposed model.
-
近年来,随着无人机技术的快速发展,无人机在电力行业的输电线路巡检方面得到广泛应用,如杆塔及线路本体精细化巡检、输电通道巡检、输电通道激光扫描数据采集、应急灾情普查巡检等。输电线路无人机自动化巡检技术研究因其高性能、低成本等优势引起广泛关注[1]。目前,无人机搭载与任务需求相匹配的载荷传感器完成航巡作业任务是进行电力线巡检的主要模式之一。而市面上可供选择的无人机平台及载荷传感器类型越来越多,提出一个巡检任务后,通常需要耗费大量的人力成本来完成模型参数的评估、校准等工作,无法适应高速发展的电力线巡检无人机选型需求。因此,如何根据特定的巡检任务需求,快速完成选择载荷传感器,并最终确定无人机平台,保证其能够高效、合理地完成巡检任务,是无人机电力线路自动化巡检研究领域亟需重点解决的问题。
根据本文的调研,大多数工作主要关注各个系统的效能评估模型研究[2-6],目前仍未有工作关注在特定任务需求下的巡线无人机平台快速匹配研究。开展该领域的研究主要需要解决的问题包括:
1) 任务需求的数值化描述。巡检任务需求通常包含大量描述性语言,如巡检对象描述,如杆塔、线路本体、输电通道走廊等,因此为了能够实现快速匹配算法,需要对此类描述完成数值化处理,以便于后续匹配模型的建立。
2) 多维度任务需求与最终参数的匹配模型建立。任务需求通常是从多个方面对所要完成的工作进行描述,如巡检目标、巡检环境、飞行高度等,因此是典型的多维度描述方法。而对多维信息进行建模和分析则需要处理复杂的非线性问题,因此如何建立多维任务描述信息与最终所需无人机平台参数模型之间的匹配模型,是需要解决的重点问题。
因此,根据对该领域研究目标和研究难点的分析,同时结合巡检无人机选型的基本思路:即任务需求决定载荷类型及参数,载荷类型及参数决定无人机平台,本文提出了3层结构的基于异构神经网络的快速匹配模型。该模型依次完成任务描述数值化、载荷参数指标生成、无人机平台匹配的任务。
利用这样的模型结构,以此挖掘巡航目标、巡航环境等巡航任务相关因素与无人机及相应数据采集设备之间的模型关系,实现巡航准备过程中的无人机及相应数据采集设备的智能化、自主化选型,最终达到提升工作效率,节约成本的目标。
1. 基于异构神经网络的快速匹配模型框架
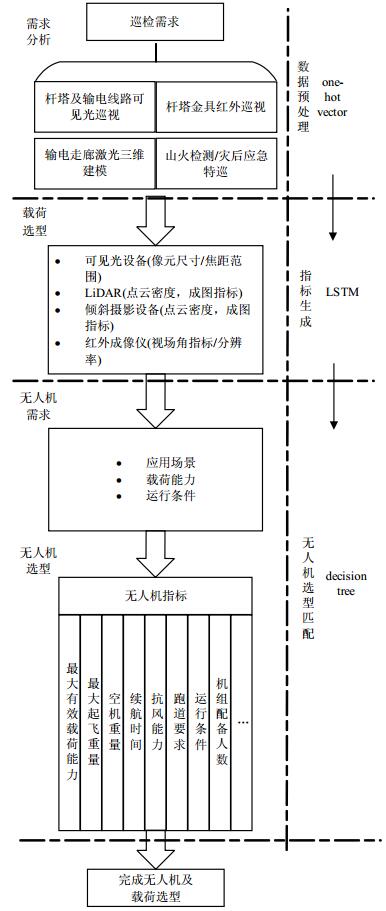
如上节所述,输电线路巡检无人机选型应从业务需求本身出发,逐层确定所需载荷类型、载荷参数、无人机参数,最终完成无人机选型。根据不同阶段的选型特点,本文提出的3层结构的基于异构神经网络的快速匹配模型框架如图 1所示,分别对应4个阶段。
1) 通过分析输电线路无人机航巡作业任务需求,明确巡检目标,如杆塔及输电线路可见光巡视、杆塔金具红外巡视、输电走廊激光三维建模、山火监测、灾后应急特巡等。
2) 通过第1)阶段获取的巡检需求确定载荷选型,确定载荷类型和载荷参数。
3) 通过第2)阶段获取的载荷类型提出无人机的选型需求,如无人机的载荷能力及应用场景等。
4) 综合第3)阶段得出的结论,确定各项无人机指标,如最大有效载荷能力、最大起飞重量、空机重量、续航时间、抗风能力、跑道要求、运行条件及机组配备人数等。
按照上述4个阶段,最终可以完成无人机及载荷选型。
相应地,基于异构神经网络的快速匹配模型分别为下面3层:
1) 数据预处理。该阶段主要将效能评估的相关需求和描述型指标数值用于无人机快速选型匹配算法,该层采用改进的one-hot vector算法实现。
2) 指标生成。指标生成是实现高可靠性、智能化模型选择的关键环节,该层通过LSTM神经网络方法建立与无人机航巡作业任务有关的因素和需求载荷参数的关系。
3) 无人机选型匹配。无人机选型匹配阶段根据指标生成模型所得到指标要求,该层利用DT方法来查询、匹配现可用设备数据库的信息,从而完成最后设备选型。
2. 基于异构神经网络的快速匹配模型
算法详述本节主要详述了基于异构神经网络的快速匹配模型所采用的关键算法,包括:数据预处理算法、指标生成算法以及无人机选型匹配算法。
2.1 数据预处理算法
在进行效能评估过程中需要用到的相关原始数据主要包含两类:
1) 描述型数据,如巡检对象(杆塔、线路本体、输电通道走廊等)描述;巡检地形(平原、山地等)描述;2)指标型数据,如起飞点海拔高度、巡航速度、风力条件等。
对于第二类数据,可以直接利用神经网络进行处理。而对于第一类数据,需要进行数据数字化的处理。本文采用one-hot vector的数据构建方式完成该项任务,one-hot vector最初是用于自然语言处理里常用词的表示方法,该方法把每个词表示为一个很长的向量[7]。这个向量的维度是词表大小,其中绝大多数元素为0,只有一个维度的值为1,这个维度就代表了当前的词,如“航巡”可表示为[0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0…]。
针对符合巡检任务选型的特殊性,本文对one-hot vector方法做了一些改进,具体步骤为:
1) 建立描述型数据字典,即将原始数据所有描述性数据的属性按照一定顺序进行排列,构建形如{巡检山地地形、巡检平原地形等}的向量字典形式;
2) 将一次任务的描述性数据整合为一个向量,按照其所包含属性逐条查询描述型数据字典,将对应的该属性的位置标为1,其余标为0,最终得到一个包含属性信息的二值向量。如:{“巡检山地地形”,“巡检平原地形”,…}=[1 0 0 0 1 0 0…]。
完成描述型数据的变形one-hot vector转换后,将所得二值向量与指标型数据连接起来,得到最终的输入数据。
2.2 指标生成算法
在输电线路无人机巡检面临的任务中,通常会有多类航巡任务相关的信息,经过数据预处理模型后,会转换为高维的输入数据,并且这些数据还有一定的逻辑序列联系,如任务需求中出现关键词“通道走廊”,则“三维建模”和“倾斜摄影测量”等关键词即具有与“通道走廊”的高维数据逻辑序列联系关系,而传统的神经网路模型(如BP神经网络)无法满足这类高维序列数据的特征学习和建模工作,因此,本文方案采用LSTM完成指标生成模型的建立[8-9]。
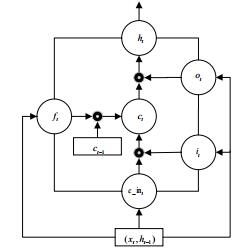
LSTM是一种特殊的神经网络结构,由于其结构的特殊性,能够学习长时间依赖。LSTM可以用来连接先前的信息到当前的任务上,如,一个语言模型可以基于先前的词来预测下一个词。如果试着预测“苹果”是下一个词,希望可以较高概率出现“红色”或“圆形”这样的词,LSTM可使用先前的信息,实现这样的功能。其网络结构如图 2所示。
相比于传统神经网络,LSTM有多个特殊结构实现信息存储。LSTM有3个门结构,分别为“输入门”、“遗忘门”和“输出门”,如式(1)~式(3)所示:
$$ {i_t} = g({W_{xi}}{x_t} + {W_{hi}}{h_{t-1}} + {b_i}) $$ (1) $$ {f_t} = g({W_{xf}}{x_t} + {W_{hf}}{h_{t-1}} + {b_f}) $$ (2) $$ {o_t} = g({W_{xo}}{x_t} + {W_{ho}}{h_{t-1}} + {b_o}) $$ (3) 式中,W为各连接权值;b为偏置向量。“输入门”决定什么值进入下一步更新,“忘记门”决定在更新过程中要丢弃的信息,“输出门”决定要输出的信息。
LSTM的输入变化为:
$$ c\_{\rm{i}}{{\rm{n}}_t} = \tanh ({W_{xc}}{x_t} + {W_{hc}}{h_{t-1}} + {b_{c\_{\rm{in}}}}) $$ (4) 根据式(1)~式(4),可以最终得到LSTM的状态更新和输出为:
$$ {c_t} = {f_t}{c_{t-1}} + {i_t} \cdot c\_{\rm{i}}{{\rm{n}}_t} $$ (5) $$ {h_t} = {o_t}\tanh ({c_t}) $$ (6) 可以通过BPTT算法更新权值向量,确定最终的网络结构,梯度求导过程详情可参见文献[8]。
2.3 无人机选型匹配算法
无人机选型匹配模型根据指标生成模型得到指标要求来匹配现可用设备数据库的信息完成最后设备选型。为了完成自主智能的选型,本文提出决策树(decision tree)具体实现选型匹配模型[10-11]。
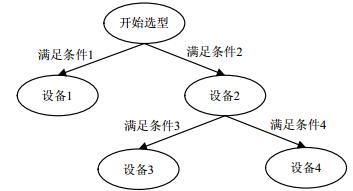
决策树的优势在于:1)决策树模型可读性好,具有描述型,适合人工分析;2)效率高,决策树模型构建完成之后,在应用过程中可以实时输出选型结果。其工作示意图如图 3所示。
决策树构建的基本步骤为:
1) 开始,所有记录看作一个节点;2)遍历每个变量的每一种分割方式,找到最好的分割点;3)分割成两个节点N1和N2;4)对N1和N2分别继续执行步骤2)和步骤3),直到每个节点分类正确率达到预设要求为止。
3. 工程案例验证
3.1 数据预处理
为了验证本文提出的快速选型匹配算法的有效性,从国网通用航空有限公司获取了原始的输电线路无人机选型标准数据作为工程案例对评估模型进行验证。具体包括巡检任务需求数据、载荷类型和参数数据、无人机参数数据以及无人机平台型号数据。部分数据如表 1所示。
表 1 无人机巡检选型原始数据数据类别 示例 任务需求 线路本体(常规/故障巡检)
附属设施(常规/故障巡检)
通道及电力保护(常规/故障巡检)
地震/泥石流/严重覆冰(应急特巡)
$ \vdots $载荷类型 可见光设备
LiDAR
倾斜摄影设备
红外成像仪
SAR
$ \vdots $载荷参数 像元尺寸
焦距范围
点云密度
成图指标
视场角指标
分辨率
$ \vdots $无人机参数 展开部署时间
最大有效载重
空机重量
抗风能力
机组人数
$ \vdots $无人机型号 ZW-5A
ZW-5B
H90
IRSA-V
XY-D60
$ \vdots $首先对这些数据中的描述型数据利用2.1节介绍方法进行数值化处理,根据不同的数据类型,构建了一个20维的描述型数据字典用于二值化,各维度所代表的意义如表 2所示。随后将所得二值向量与指标型数据连接起来,得到最终的输入数据。对于每一个单独的选型任务,可以得到一个20维的输入向量和一个7维的目标向量,具体内容如表 3所示。输入向量是描述任务的相关需求,目标向量是描述完成该任务载荷需要具备的性能参数。根据对源数据的统计,共得到179个数据样本,每条数据样本代表一个完整的基于任务需求的无人机平台匹配过程。
表 2 巡检任务描述字典各维度的意义维度 内容 1 线路本体常规巡检——精细化巡检 2 线路本体常规巡检——通道巡检 3 线路本体故障巡检 4 附属设施常规巡检——精细化巡检 5 附属设施常规巡检——通道巡检 6 附属设施故障巡检 7 通道常规巡检——精细化巡检 8 通道常规巡检——通道巡检 9 通道故障巡检 10 电力保护常规巡检——精细化巡检 11 电力保护常规巡检——通道巡检 12 电力保护故障巡检 13 应急特巡——地震 14 应急特巡——泥石流 15 应急特巡——严重覆冰 16 应急特巡——山火 17 建筑物巡检 18 基础设施巡检 19 场景三维建模 20 线路缺陷发热巡检 表 3 目标输出向量各维度的意义维度 内容 1 载荷类型 2 像元尺寸 3 焦距范围 4 点云密度 5 成图指标 6 视场角指标 7 分辨率 3.2 指标生成模型
对于基于LSTM神经网络的指标生成模型,本文选取140个作为训练数据,其余39个样本作为此效能模型的评估数据。则训练数据的输入数据矩阵维数为:140×20,输出矩阵维数为:140×7。
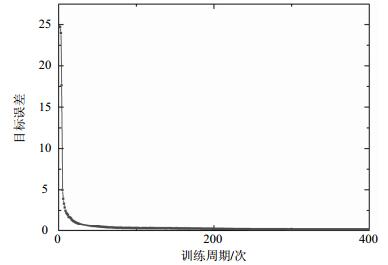
基于实验的数据特点,本文设计的LSTM网络结构为两个隐藏层,输入层节点为140,隐藏节点为[300, 100],输出层节点数为7,训练周期数为400。图 4为LSTM的训练误差变化趋势。
可以看到训练误差可以很快达到目标误差的要求,并以此判断所获得的网络模型可以用来生成各传感器参数指标。
3.3 无人机匹配模型
本文采用C4.5决策树算法构建决策树。输入为3.2节生成的7个指标,每个节点属性根据表 1中无人机各项指标设定。决策树的输出为各个可选无人机平台及载荷型号。
根据前述步骤,完成构建无人机平台快速匹配模型,利用测试数据进行测试(输入数据维数:39×20),得到的配型结果与测试样本真实的配型结果进行对比,匹配准确率为100%×38/39= 97.44%。基本达到可以自主进行无人机匹配选型的目标。
4. 结束语
实验结果表明,本文提出的3层结构的基于异构神经网络的无人机平台快速匹配模型能够以较高的准确率(97.44%)完成无人机的匹配选型任务。且随着收集到的无人机选型匹配案例,使得LSTM、DT等神经网络结构能更好地挖掘其中包含的信息,进一步提升无人机效能评估模型的可靠性。
此外,为了更好地提升基于巡检任务需求的无人机平台快速匹配选型的准确率和可靠程度,未来对该问题的研究方向将主要集中于以下两个方面:
1) 构建基于输电线路巡检任务需求的无人机平台选型匹配案例知识库。
根据已有的成功选型案例,建立相关的案例知识库,加入交叉查询、索引查询等查询机制,为建立快速匹配模型提供可靠的数据源。
2) 引入基于数据的推理模型,完成对陌生任务的相关指标需求生成及平台选型工作。
现有的匹配模型通常是对历史任务需求和无人机选型做匹配模型的构建,但面对陌生任务,则无法完成指标生成的工作,因此未来的研究中需要引入具备推理能力的模型结构,通过分析陌生任务与已有案例的相似处,生成相应的指标要求,完成平台的选型匹配工作。
-
表 1 无人机巡检选型原始数据
数据类别 示例 任务需求 线路本体(常规/故障巡检)
附属设施(常规/故障巡检)
通道及电力保护(常规/故障巡检)
地震/泥石流/严重覆冰(应急特巡)
$ \vdots $载荷类型 可见光设备
LiDAR
倾斜摄影设备
红外成像仪
SAR
$ \vdots $载荷参数 像元尺寸
焦距范围
点云密度
成图指标
视场角指标
分辨率
$ \vdots $无人机参数 展开部署时间
最大有效载重
空机重量
抗风能力
机组人数
$ \vdots $无人机型号 ZW-5A
ZW-5B
H90
IRSA-V
XY-D60
$ \vdots $ 下载: 导出CSV
下载: 导出CSV
表 2 巡检任务描述字典各维度的意义
维度 内容 1 线路本体常规巡检——精细化巡检 2 线路本体常规巡检——通道巡检 3 线路本体故障巡检 4 附属设施常规巡检——精细化巡检 5 附属设施常规巡检——通道巡检 6 附属设施故障巡检 7 通道常规巡检——精细化巡检 8 通道常规巡检——通道巡检 9 通道故障巡检 10 电力保护常规巡检——精细化巡检 11 电力保护常规巡检——通道巡检 12 电力保护故障巡检 13 应急特巡——地震 14 应急特巡——泥石流 15 应急特巡——严重覆冰 16 应急特巡——山火 17 建筑物巡检 18 基础设施巡检 19 场景三维建模 20 线路缺陷发热巡检
下载: 导出CSV
-
[1] 王淼, 杜毅, 张忠瑞.无人机辅助巡视及绝缘子缺陷图像识别研究[J].电子测量与仪器学报, 2015, 29(12):1862-1869. https://www.hanspub.org/journal/PaperInformation.aspx?paperID=22299 WANG Miao, DU Yi, ZHANG Zhong-rui. Study on power transmission lines inspection using unmanned aerial vehicle and image recognition of insulator defect[J]. Journal of Electronic Measurement and Instrument, 2015, 29(12):1862-1869. https://www.hanspub.org/journal/PaperInformation.aspx?paperID=22299
[2] TILLMAN F A, HWANG C L, KUO W. System effectiveness models:an annotated bibliography[J]. IEEE Transactions on Reliability, 1980, 29(4):295-304. https://www.infona.pl/resource/bwmeta1.element.ieee-art-000005220844
[3] 郑海, 黄树采, 刘晖.攻击机对地攻击WSEIAC模型研究[J].空军工程大学学报:自然科学版, 2004, 5(2):27-29. http://mall.cnki.net/magazine/Article/ZSDD201403006.htm ZHENG Hai, HUANG Shu-cai, LIU Hui. WSEIAC model research of air-to-surface strike for attacker[J]. Journal of Air Force Engineering University (Natural Science Edition), 2004, 5(2):27-29. http://mall.cnki.net/magazine/Article/ZSDD201403006.htm
[4] 粘松雷, 严建钢, 林云.基于模糊理论的战斗机空战效能评估模型[J].舰船电子工程, 2011, 31(7):29-31. https://mall.cnki.net/lunwen-1014369250.html NIAN Song-lei, YAN Jian-gang, LIN Yun. Estimation model of air combat effectiveness for fighter based on fuzzy theory[J]. Ship Electronic Engineering, 2011, 31(7):29-31. https://mall.cnki.net/lunwen-1014369250.html
[5] 胡杰, 刘晓东, 陆四海.效用函数的装备保障效能分析与评估[J].火力与指挥控制, 2012, 37(1):99-104. http://www.cqvip.com/QK/91376X/201201/40895939.html HU Jie, LIU Xiao-dong, LU Si-hai. On analysis and evaluation of equipment support efficiency based on the theory of utility function[J]. Fire Control & Command Control, 2012, 37(1):99-104. http://www.cqvip.com/QK/91376X/201201/40895939.html
[6] 李浩, 吴帅, 王公宝.基于模糊AHP评判的反恐分队综合作战效能评估[J].舰船电子工程, 2012, 32(4):33-35. https://www.wenkuxiazai.com/doc/89d38be1998fcc22bcd10df9.html LI Hao, WU Shuai, WANG Gong-bao. Anti-terrorists combat effectiveness evaluation based on fuzzy AHP and DEA comprehensive evaluation[J]. Ship Electronic Engineering, 2012, 32(4):33-35. https://www.wenkuxiazai.com/doc/89d38be1998fcc22bcd10df9.html
[7] CHREN Jr W A. Low delay-power product CMOS design using one-hot residue coding[C]//Proceedings of the 1995 International Symposium on Low Power Design. [S. l. ]: ACM, 1995: 145-150.
[8] HOCHREITER S, SCHMIDHUBER J. Long short-term memory[J]. Neural Computation, 1997, 9(8):1735-1780. DOI: 10.1162/neco.1997.9.8.1735
[9] SAK H, SENIOR A W, BEAUFAYS F. Long short-term memory recurrent neural network architectures for large scale acoustic modeling[C]//Interspeech. [S. l. ]: Computer Science, 2014: 338-342.
[10] FRIEDL M A, BRODLEY C E. Decision tree classification of land cover from remotely sensed data[J]. Remote Sensing of Environment, 1997, 61(3):399-409. DOI: 10.1016/S0034-4257(97)00049-7
[11] CHAWLA N V. C4. 5 and imbalanced data sets: Investigating the effect of sampling method, probabilistic estimate, and decision tree structure[C]//Proceedings of the ICML. Washington DC: [s. n. ], 2003.
-
期刊类型引用(12)
1. 黄灯魁. 机载雷达技术在植被实物指标调查中的应用. 测绘与空间地理信息. 2023(01): 198-200+204 .  百度学术
百度学术
2. 徐晓敏,朱晓峰,李江成,朱正磊,刘鑫,郭青玄. 基于智能图像识别的无人机电力线路安全巡检方法. 电力大数据. 2023(02): 10-16 . 百度学术
3. 罗建斌,郑耀华,何勇,张雨,孙仝,陆勇生,袁新星. 基于UAV的输电线路周围植被管理分析. 电子器件. 2023(03): 854-860 . 百度学术
4. 徐梁,卜京. 基于无人机低空遥感的输变电线路定时巡检系统. 电子设计工程. 2022(05): 90-94 . 百度学术
5. 阮国恒,李文航. 基于视频联动技术的输电线路远程智能巡检方法. 自动化与仪器仪表. 2021(01): 77-80+84 . 百度学术
6. 李海峰. 输电线路巡线机器人避障控制系统设计. 电子设计工程. 2021(14): 116-120 . 百度学术
7. 徐真,者梅林,孙斌. 基于三维成像激光雷达技术的输电线路树障预测模型. 电子设计工程. 2021(22): 55-58+63 . 百度学术
8. 宋立辉. 输电线路巡检无人机安全距离确定方法研究. 信息技术. 2021(11): 121-125+131 . 百度学术
9. 陈适,金泉. 探究输电巡检中无人机技术的应用. 建材与装饰. 2020(03): 236-237 . 百度学术
10. 苏两河. 巡检无人机灾备应急充电装置. 蓄电池. 2019(02): 92-96 . 百度学术
11. 郑仟,李宁. 输电线路无人机巡检智能管理系统的研究与应用. 电子设计工程. 2019(09): 74-77+82 . 百度学术
12. 谢雨佳. 探究输电巡检中无人机技术的应用. 科技风. 2018(26): 4 . 百度学术
其他类型引用(7)
计量
- 文章访问数: 6569
- HTML全文浏览量: 1910
- PDF下载量: 169
- 被引次数: 19